常用机构(四连杆机构)
- 格式:ppt
- 大小:2.99 MB
- 文档页数:42
第二章常用机构学习目标1.了解和掌握铰链四杆机构的组成、基本类型及其特点和应用2.了解和掌握凸轮机构的组成、特点、分类、应用及其从动件常用运动规律3.了解棘轮机构和槽轮机构的组成、分类、特点和应用无论是在生活中,还是在生产中,种各样的机构都在为人们的生活和作服务。
例如,门窗、天平秤、铲机、火车一、运动副使两构件直接接触而又能产生一定相对运动的连接,称为运动副。
在工程上,人们把运动副按其运动范围分为空间运动副和平面运动副两大类。
在一般机器中,经常遇到的是平面运动副。
平面运动副根据组成运动副的两构件的接触形式不同,可分为低副和高副。
1.低副低副是指两构件之间作面接触的运动副(图2—1),包括转动副、移动副和螺旋副。
图 2—1高副 2.高副是指两构件之间作点或线接触的运动副(图 2—2)二、平面连杆机构平面连杆机构的各构件是用销轴、滑道(低副)等方式连接起来的,各构件间的相对运动均在同一平面或互相平行的平面内。
最简单的平面连杆机构是由4个杆件组成的,简称平面四杆机构,其结构简单,易于制造,工作可靠,因此应用非常广泛。
图2—3所示2 图 2—口港重物连摇构中的双为机铲土了保证铲斗平行移动,防止泥土流出,采用了平面连杆机构3—图 2—§21 铰链四杆机构所示;在日常生—63铰链(即转动副)的形式很多,机械设备中铰链的一般形式如图 2活中,门和家具上用的合叶(图—)也是铰链联接的具体应用。
44图 2—铰链四杆机构在生活、生产和工作中广泛用于动力的传递或者改变运动的形式,例如)的运动等都是利用铰链四杆—62公共汽车车门的开闭(图2—5)、汽车前窗刮雨器(图机构来完成工作任务的。
公共汽车车门上安装了铰链四杆机构,通过杆件的联动,使两侧车门实现同时开启、同时关闭的运动。
5 图2—当有雨水或雾气聚集在汽车前挡玻璃上挡住驾驶员的视线时,开启汽车前窗刮雨器,雨刮在电动机的带动下就会左右摆动刮去雨水或雾气。
雨刮为什么能将电动机的旋转运动转变为来回的摆动?这也是铰链四杆机构的作用。
机械设计常用机构一、引言机械设计是一门综合性很强的学科,它涉及到很多方面的知识,其中机构设计是一个非常重要的部分。
机构是由两个或两个以上的零件连接而成,用于传递力和运动。
在机械设计中,常用机构包括平面机构、空间机构、连杆机构等等。
本文将对常用的几种机构进行介绍。
二、平面机构平面机构是指所有零件均在同一平面内运动的机构。
根据其结构和运动特点,平面机构可以分为以下几种类型。
1.四连杆机构四连杆机构是最简单的平面运动副之一,由4个刚性连杆组成。
它有很多应用场合,如摇臂钳床、活塞式发动机等。
2.曲柄滑块副曲柄滑块副是由曲柄轴和滑块组成的副件。
它可以将旋转运动转换为直线运动,并且具有较大的力矩传递能力。
常见应用于发电厂、水泵等设备上。
3.齿轮传动齿轮传动是利用齿轮之间相互啮合的原理,将动力从一处传递到另一处。
它具有传递力矩大、精度高等优点,常用于汽车、机床等设备上。
三、空间机构空间机构是指零件在三维空间内运动的机构。
根据其结构和运动特点,空间机构可以分为以下几种类型。
1.球面副球面副是由两个球体组成的零件,其中一个球体固定不动,另一个球体则可以在其表面上自由滑动。
它常用于汽车悬挂系统、航天器等领域。
2.万向节万向节是将两个轴相连接的一种机构,它可以使两个轴在不同方向上转动,并且具有较大的角度范围。
它常用于汽车转向系统、飞行器等领域。
3.蜗杆副蜗杆副是由蜗杆和蜗轮组成的一种机构。
它可以将旋转运动转换为直线运动,并且具有较大的力矩传递能力。
常用于起重设备、钢铁冶金设备等领域。
四、连杆机构连杆机构是由两个或多个连杆连接而成的机构,它可以将旋转运动转换为直线运动。
根据其结构和运动特点,连杆机构可以分为以下几种类型。
1.曲柄摇杆机构曲柄摇杆机构是由曲柄、摇杆和连杆组成的一种机构。
它可以将旋转运动转换为直线运动,并且具有较大的力矩传递能力。
常用于发电厂、水泵等设备上。
2.双曲面副双曲面副是由两个双曲面组成的零件,其中一个双曲面固定不动,另一个双曲面则可以在其表面上自由滑动。
传统机械结构及应用传统机械结构是指在工程和制造领域中广泛应用的基础机械结构,它们既可以单独应用,也可以组合在一起形成更复杂的机械系统。
这些结构通常由各种传动机构、骨架支撑和工作部件组成,用于实现特定的功能和任务。
下面将重点介绍一些常见的传统机械结构及其应用。
1. 四连杆机构四连杆机构是由四个杆件连接而成,其中两个杆件固定不动,另外两个杆件可以运动。
这种机构具有较好的工作稳定性和精度,常见的应用包括内燃机活塞连杆机构、机床推进机构等。
2. 齿轮传动齿轮传动是利用齿轮间的啮合与滚动来传递力和运动的一种机械传动方式。
它具有传动效率高、传动比稳定等特点,广泛应用于各种机械设备中,如汽车传动系统、工程机械的减速箱等。
3. 曲柄连杆机构曲柄连杆机构是由曲柄、连杆和活塞等组成的机械结构,常用于内燃机、柴油机等燃烧式发动机中。
曲柄连杆机构通过曲柄的转动将往复直线运动转化为旋转运动,实现活塞的工作,从而驱动其他部件的运动。
4. 皮带传动皮带传动是利用皮带与轮盘之间的摩擦来传递动力和运动的一种传动方式。
它具有结构简单、噪音小、传动平稳等特点,常用于机械设备的传动系统中,如发电机组、水泥生产线等。
5. 铰链机构铰链机构是由多个相连的铰链组成的机构,它具有良好的灵活性和可调性,常用于各种复杂的运动机构中,如机械手臂、门窗开关装置等。
6. 定位机构定位机构是一种用于实现精确位置控制的机械结构,它通过各种滑块、销轴、螺旋副等元件,使工件能够按照设计要求精确地定位和移动。
定位机构广泛应用于制造、装配等领域,如数控机床、自动化生产线等。
7. 传动链条传动链条是利用链条与链轮之间的啮合来传递力和运动的一种机械传动方式。
它具有结构简单、传动效率高等优点,常用于摩托车、自行车等交通工具,以及工程机械的传动系统中。
8. 螺杆传动螺杆传动是通过螺杆与螺母之间的啮合来实现转矩传递和运动的一种传动机构。
它具有自锁特性和传动比可调性,常用于各种需要大力矩传递的设备,如升降机、起重机等。
四连杆机构原理
四连杆机构是一种常见的机械结构,由四个连杆组成,其中两个为主动连杆,两个为从动连杆。
四连杆机构的原理和应用十分广泛,下面将对其原理进行详细介绍。
首先,四连杆机构的结构特点是由四个连杆组成的闭合链条,其中两个连杆被固定,另外两个连杆能够相对运动。
这种结构使得四连杆机构具有较为灵活的运动特性,可以用于各种机械装置中。
其次,四连杆机构的运动原理是通过主动连杆的运动来驱动从动连杆的运动。
主动连杆通过外部力或驱动装置进行运动,从而带动从动连杆做相应的运动。
这种结构使得四连杆机构能够实现复杂的运动轨迹和运动规律,可以用于各种需要复杂运动的机械装置中。
四连杆机构的运动规律可以通过运动分析和动力学分析来进行研究。
通过对各个连杆的长度、角度和速度等参数进行分析,可以得到四连杆机构的运动规律和特性。
这对于设计和优化四连杆机构具有重要意义,可以使得机构的运动更加稳定和高效。
在实际应用中,四连杆机构被广泛应用于各种机械装置中,如发动机、机械手臂、输送装置等。
其灵活的运动特性和复杂的运动规律使得四连杆机构能够满足各种复杂的工程需求,成为机械设计中常用的重要元件之一。
总之,四连杆机构是一种常见的机械结构,具有灵活的运动特性和复杂的运动规律。
通过对其结构和运动原理的深入研究,可以更好地应用于各种机械装置中,为工程设计和制造提供重要的支持和帮助。
四杆机构是机械制造中常用的一种机构,它由四根连接件组成,可以实现旋转或者直线运动。
其中,曲柄是四杆机构中的重要组成部分,它具有一定的特殊性。
下面我们将对四杆机构中曲柄存在的条件及其推论进行介绍和分析。
一、曲柄存在的条件在四连杆机构中,曲柄的存在有一定的条件限制,以下为曲柄存在的条件:1. 曲柄机构的参数满足Grashof条件。
Grashof条件是四连杆机构的一种特殊情况,它要求四个杆件中至少有一个杆件的长度小于其他三个杆件的长度之和,并且满足这一条件的四杆机构中必定存在曲柄。
2. 四杆机构的对角杆之和大于另外两杆之和。
即对角杆之和大于两边杆之和,这是曲柄存在的另一种条件,满足这一条件的四杆机构就可以保证存在曲柄。
二、曲柄存在的推论曲柄存在的条件决定了曲柄在四杆机构中的作用和特性,下面是曲柄存在时的一些推论:1. 曲柄机构能够实现双转动。
由于曲柄存在的特殊性,使得四杆机构的曲柄具有双转动的特点,即曲柄能够实现两种不同的旋转运动方式。
2. 曲柄机构可以用于传动系统。
曲柄机构在传动系统中具有重要作用,它可以通过曲柄和连杆的转动实现对其他机械部件的传动和控制。
三、结论通过以上对四杆机构曲柄存在的条件及其推论的介绍和分析,我们可以看出曲柄在四杆机构中具有重要作用,同时也需要满足一定的条件限制。
曲柄的存在不仅能够实现双转动,还可以用于传动系统中,对于机械制造和应用中具有一定的实际意义和价值。
在设计和应用四杆机构时,需要充分考虑曲柄的存在条件及其推论,以保证机构的正常运行和性能表现。
以上就是关于四杆机构曲柄存在的条件及其推论的介绍,希望可以对您有所帮助。
很高兴您对四杆机构曲柄存在的条件及其推论感兴趣,接下来我们将进一步扩展这个话题,探讨曲柄在机械制造和应用中的更多实际意义和价值。
四、曲柄的作用曲柄在四杆机构中有着重要的作用,它不仅可以实现双转动,还可以通过传动系统影响机械装置的运行。
1. 实现双转动曲柄在四杆机构中的存在使得机构具有了双转动的特点。
四连杆机构原理受力四连杆机构是一种常用的机械传动装置,由四个连杆组成,可以实现复杂的运动轨迹。
在四连杆机构中,各个连杆之间的受力关系是非常重要的,它直接影响到机构的运动特性和稳定性。
我们来看一下四连杆机构中各个连杆的受力情况。
四连杆机构由一个固定连杆、两个活动连杆和一个驱动连杆组成。
固定连杆连接固定点和驱动点,活动连杆连接驱动点和工作点,驱动连杆连接工作点和固定点。
在四连杆机构中,驱动连杆是通过驱动点的力来产生运动的,而活动连杆则转化这个运动,并将其传递给工作点。
在四连杆机构中,各个连杆之间的受力关系是相互影响的。
首先,固定连杆在连接点处受到驱动点的力,这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使固定连杆产生水平方向的拉力,垂直方向的分力使固定连杆产生垂直向上的压力。
这些受力使得固定连杆保持稳定,并且不会发生位移。
接下来,活动连杆在连接点处同样受到驱动点的力。
这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使活动连杆产生水平方向的拉力,垂直方向的分力使活动连杆产生垂直向上的压力。
这些受力使得活动连杆具有一定的刚度,并且可以传递驱动点的力给工作点。
驱动连杆在连接点处同样受到驱动点的力。
这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使驱动连杆产生水平方向的拉力,垂直方向的分力使驱动连杆产生垂直向上的压力。
这些受力使得驱动连杆能够将驱动点的力传递给工作点,并且实现机构的运动。
四连杆机构中各个连杆之间的受力关系是非常重要的。
固定连杆、活动连杆和驱动连杆都承受着来自驱动点的力,这些力使得连杆产生拉力和压力,并且保持机构的稳定性和运动特性。
在实际应用中,我们需要根据具体情况来选择合适的连杆长度和连接方式,以确保机构的可靠性和性能。
四连杆机构中各个连杆之间的受力关系是非常重要的。
了解这些受力关系可以帮助我们更好地设计和应用四连杆机构,实现所需的运动轨迹和功能。
同时,我们还需要注意机构的稳定性和可靠性,确保机构在工作过程中不会出现失效和故障。
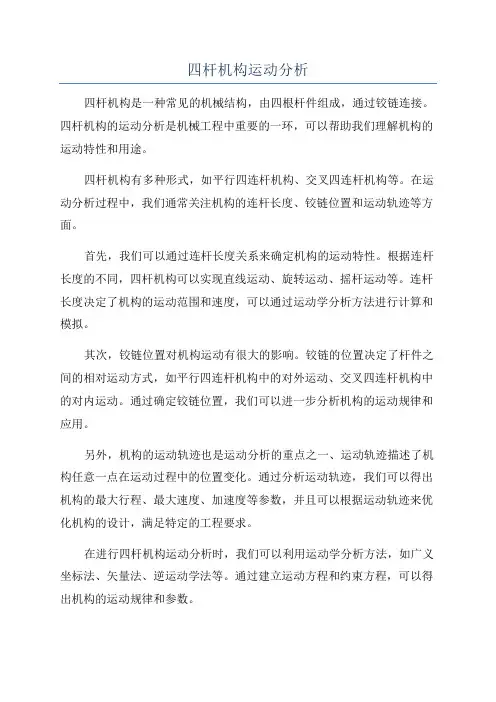
四杆机构运动分析四杆机构是一种常见的机械结构,由四根杆件组成,通过铰链连接。
四杆机构的运动分析是机械工程中重要的一环,可以帮助我们理解机构的运动特性和用途。
四杆机构有多种形式,如平行四连杆机构、交叉四连杆机构等。
在运动分析过程中,我们通常关注机构的连杆长度、铰链位置和运动轨迹等方面。
首先,我们可以通过连杆长度关系来确定机构的运动特性。
根据连杆长度的不同,四杆机构可以实现直线运动、旋转运动、摇杆运动等。
连杆长度决定了机构的运动范围和速度,可以通过运动学分析方法进行计算和模拟。
其次,铰链位置对机构运动有很大的影响。
铰链的位置决定了杆件之间的相对运动方式,如平行四连杆机构中的对外运动、交叉四连杆机构中的对内运动。
通过确定铰链位置,我们可以进一步分析机构的运动规律和应用。
另外,机构的运动轨迹也是运动分析的重点之一、运动轨迹描述了机构任意一点在运动过程中的位置变化。
通过分析运动轨迹,我们可以得出机构的最大行程、最大速度、加速度等参数,并且可以根据运动轨迹来优化机构的设计,满足特定的工程要求。
在进行四杆机构运动分析时,我们可以利用运动学分析方法,如广义坐标法、矢量法、逆运动学法等。
通过建立运动方程和约束方程,可以得出机构的运动规律和参数。
此外,计算机辅助设计软件和仿真系统也可以帮助我们进行四杆机构的运动分析。
通过输入机构的参数和初始条件,可以模拟机构的运动过程,观察各个杆件的位置、速度和加速度等变化情况。
四杆机构的运动分析对于机械设计和工程实践都具有重要的意义。
它可以帮助我们了解机构的运动特性,优化机构的设计,提高机械系统的性能和效率。
同时,运动分析也是机械工程师在机构设计和动力传动中常用的工具,通过运动分析可以得到有效的设计参数和工作条件。
四杆机构的运动分析是机械工程师必备的技术之一,也是机械工程教育中的重要内容。
四连杆机构原理1. 引言四连杆机构是一种常用的机械传动装置,由四个连杆构成,通过连接副将输入和输出转动运动传递给工作机构。
四连杆机构广泛应用于各种机械设备中,如发动机、汽车悬挂系统、摇臂式切割机等。
本文将详细解释四连杆机构的基本原理及其相关概念。
2. 基本概念在了解四连杆机构的原理之前,我们先来了解一些基本概念:•连杆:连接两个点的刚性杆件。
•转动副:两个连杆通过一个转动点连接而成的副。
•连接副:将两个转动副连接起来的装置。
•固定点:在运动过程中不发生位移和转动的点。
•输入连杆:与驱动源相连接的连杆。
•输出连杆:与工作机构相连接的连杆。
•运动学分析:研究物体位置、速度和加速度等运动特性的学科。
3. 四连杆机构结构四连杆机构由四个连杆和若干个转动副组成。
其中,一个连杆被固定在某个点上,称为固定连杆;另外一个连杆由输入源驱动,称为输入连杆;剩下的两个连杆连接在一起,并通过连接副与输入连杆和输出连杆相连接,称为连接连杆。
四连杆机构主要包括以下几个部分:•输入连杆:由输入源驱动,提供动力。
•输出连杆:与工作机构相连接,传递运动。
•连接连杆:将输入和输出连杆连接起来。
•转动副:连接各个连杆的转动点。
4. 四连杆机构的运动学分析四连杆机构的运动学分析是研究其位置、速度和加速度等运动特性的过程。
通过运动学分析可以确定机构的工作性能、优化设计以及预测机构的故障。
4.1 位置分析位置分析是研究机构各个部件在运动过程中的位置关系。
对于四连杆机构而言,我们需要确定各个转动副之间的相对位置关系。
在进行位置分析时,我们可以利用几何方法或向量方法。
其中,几何方法主要通过绘制示意图、利用三角函数等来求解;向量方法则利用向量运算来求解。
4.2 速度分析速度分析是研究机构各个部件在运动过程中的速度关系。
对于四连杆机构而言,我们需要确定各个转动副之间的相对速度关系。
在进行速度分析时,我们可以利用几何方法或向量方法。
其中,几何方法主要通过绘制示意图、利用三角函数等来求解;向量方法则利用向量运算来求解。
四连杆机构原理
四连杆机构是一种常用的机械传动装置,由四个连杆组成。
它的结构简单,具有较高的稳定性和刚性,可以将旋转运动转换为直线或其他复杂运动。
四连杆机构由一个固定点和四个连接成平行四边形的连杆组成。
其中两个连接点固定,称为固定点A和B,而另外两个连接
点可以相对于固定点进行运动,称为移动点C和D。
当其中一个移动点C进行旋转运动时,另一个移动点D会相
应地进行直线运动。
这是因为固定点A和B固定不动,而连
杆AC和BD与固定点相连,使得连杆AC和BD随着移动点
C的旋转而作直线运动。
通过调整连杆的长度和位置,可以改变移动点D的运动路线。
例如,如果将连杆中心设为旋转中心,并调整连杆的长度,可以使得移动点D与旋转中心在同一直线上运动,即将旋转运
动转换为直线运动。
四连杆机构不仅可以将旋转运动转换为直线运动,还可以将旋转运动转换为其他复杂运动,如椭圆运动、摆线运动等。
这使得四连杆机构在许多机械传动和工程应用中得到广泛应用。
总之,四连杆机构通过调整连杆的长度和位置,可以将旋转运动转换为直线或其他复杂运动。
它的简单结构和高稳定性使得它在机械传动领域中发挥重要的作用。
四连杆死点原理-概述说明以及解释1.引言1.1 概述四连杆是一种机械构造,在工程学和机械设计中被广泛应用。
它由四条连杆组成,每个连杆通过转轴连接,形成一个闭合的结构。
四连杆具有许多重要的特性和应用,其中之一就是死点。
死点是指在四连杆运动过程中某些特定位置处,连杆之间的相对运动停止或速度为零。
在这些位置上,四连杆无法继续平稳运动,会出现停滞或无法启动的情况。
死点的存在会给四连杆带来一些不利影响。
首先,死点会导致运动过程中的能量损失,因为在死点附近,连杆之间的相对运动较慢,导致能量转化效率降低。
其次,死点会限制四连杆的运动自由度,使得其运动范围受限。
这可能会限制了四连杆在一些特定应用中的灵活性和适用性。
了解四连杆死点原理对于机械设计师和工程师来说非常重要。
通过研究死点的发生原因、位置和影响,可以有针对性地进行优化和改进,减少死点对系统性能的影响。
此外,对死点原理的深入理解还能够引导我们合理规划和设计工作机构,确保系统的可靠性和稳定性。
在本文中,我们将详细解释四连杆死点原理的背后机制并探讨其重要性。
首先我们将介绍四连杆的概念和构造,为读者提供一个基本的认知。
然后我们将定义和解释死点的概念,探讨死点对于四连杆运动的影响。
最后,我们将阐述四连杆死点原理的解释,并总结其在实际工程中的重要性。
通过本文的阅读,读者将能够深入了解四连杆死点原理,并了解如何应用这一知识来进行机械设计和优化。
1.2 文章结构文章结构部分的内容应包括对整篇文章的组成部分的简要介绍。
文章结构可以分为以下几个部分:1. 引言:在引言部分,会对四连杆死点原理的背景和重要性进行概述,并阐明文章的目的。
2. 正文:正文部分主要分为三个小节,分别是四连杆的概念和构造、死点的定义和影响,以及四连杆死点原理的解释。
在这些小节中,会对四连杆的构造和工作原理进行详细介绍,并解释死点的概念及其对四连杆运动的影响,最后会给出对四连杆死点原理的解释。
3. 结论:结论部分总结了四连杆死点原理的重要性,并展望了对该原理的应用前景。
曲柄双滑块的原理
曲柄双滑块是一种机械运动机构,也称为四连杆机构。
它由曲柄、连杆和双滑块组成。
曲柄双滑块经常用于制造机床、压力机、冲床、摆线机构等机械设备。
曲柄双滑块的工作原理:
1.曲柄旋转:当曲柄旋转时,曲柄的转动将被传递到连杆上。
2.连杆运动:连杆受曲柄的影响而运动。
3.双滑块运动:主滑块和从滑块在连接连杆的同时也向前和向后运动。
曲柄双滑块的特点:
1.结构简单:曲柄双滑块结构相对简单,易于制造和维护。
2.运动平稳:由于曲柄的连动,双滑块运动平稳,抗震性能好。
3.传动轴的距离短:曲柄双滑块的传动轴距离短,能节省空间并增加机器的稳定性。
4.可靠性强:由于结构简单,曲柄双滑块的可靠性相对较高,使用寿命较长。
5.运动轨迹可调:曲线轨迹可根据需求进行调整,能满足不同的生产要求。
曲柄双滑块的应用领域:
1.机床:曲柄双滑块常用于制造机床设备,如镗床、铣床、刨床等。
2.压力机:压力机行程和速度都可通过曲柄双滑块来调节,使压力机操作更加稳定。
3.冲床:冲床通过曲柄双滑块的运动,实现铆接、成型、折弯等加工工艺的操作。
4.摆线机构:曲柄双滑块能应用于摆线机构制造中,满足不同的运动要求。
总之,曲柄双滑块机械运动机构具有结构简单、运动平稳、可靠性强等优点。
随着技术的不断提升,曲柄双滑块在机械制造领域中的应用也将越来越广泛。