Simulink建模仿真实例详解
- 格式:pdf
- 大小:1.11 MB
- 文档页数:174

matlab的simulink仿真建模举例-回复Matlab的Simulink仿真建模举例Simulink是Matlab附带的一款强大的仿真建模工具,它能够帮助工程师们通过可视化的方式建立和调试动态系统模型。
Simulink通过简化传统的数学模型建立过程,使得工程师们能够更加直观地理解和分析复杂的系统。
在本文中,我们将介绍一个关于电机控制系统的Simulink仿真建模的例子。
一、了解电机控制系统在开始建模之前,我们首先需要了解电机控制系统的基本原理。
电机控制系统通常包括输入、电机和输出三个主要部分。
输入通常是来自于传感器或用户的命令信号,例如转速、位置或力矩。
电机是通过接受输入信号并根据特定的控制算法生成输出信号。
输出信号通常是电机的转速、位置或功率等。
控制算法通常采用比例-积分-微分(PID)控制或者其他控制算法。
二、建立Simulink模型1. 创建新的Simulink模型在Matlab主界面中,选择Simulink选项卡下的“New Model”创建一个新的Simulink模型。
2. 添加输入信号在Simulink模型中,我们首先需要添加输入信号模块。
在Simulink库浏览器中选择“Sources”类别,在右侧面板中找到“Step”模块,并将其拖放到模型中。
3. 添加电机模型接下来,我们需要将电机模型添加到Simulink模型中。
Simulink库浏览器中选择“Simscape”类别,在右侧面板中找到“Simscape Electrical”子类别,然后找到“Simscape模型”模块,并将其拖放到模型中。
4. 连接输入信号和电机模型将输入信号模块的输出端口与电机模型的输入端口相连,以建立输入信号与电机模型之间的连接。
5. 添加输出信号模块在Simulink模型中,我们还需要添加输出信号模块。
在Simulink库浏览器中选择“Sinks”类别,在右侧面板中找到“Scope”模块,并将其拖放到模型中。

simulink建模实例Simulink是一种功能强大的工具,用于建立和模拟各种系统的动态行为。
它可以帮助工程师和科学家更好地理解和分析系统的行为,并进行系统设计和优化。
下面我将通过一个实例来展示Simulink的应用。
假设我们要建立一个控制系统,用于控制一个小型机器人的移动。
该机器人有两个驱动轮,我们希望能够通过Simulink来设计一个控制器,使机器人能够按照预定的路径移动。
我们需要建立一个系统模型,包括机器人本身、传感器和执行器。
在Simulink中,我们可以使用各种模块来表示这些组件,并使用连线连接它们。
例如,我们可以使用“转向模块”来表示机器人的转向系统,使用“速度模块”来表示机器人的速度控制系统。
接下来,我们需要定义机器人的运动路径。
在Simulink中,我们可以使用“路径生成器”模块来定义路径。
通过调整路径生成器的参数,我们可以创建各种形状的路径,例如直线、曲线等。
然后,我们需要设计一个控制器,将路径信息转换为机器人的运动指令。
在Simulink中,我们可以使用“控制器模块”来实现这一功能。
该模块可以根据路径信息和机器人的当前位置,计算出机器人应该采取的行动,例如转向角度和速度。
我们需要将控制指令发送给机器人的执行器,以实现机器人的移动。
在Simulink中,我们可以使用“执行器模块”来模拟执行器的行为。
该模块可以将控制指令转换为实际的电压或力矩信号,驱动机器人的驱动轮进行运动。
通过上述步骤,我们就建立了一个完整的机器人控制系统模型。
我们可以在Simulink中进行仿真,观察机器人在不同路径和控制策略下的运动行为。
通过调整模型中各个组件的参数,我们可以进行系统性能的优化和改进。
Simulink是一个强大的工具,可以帮助我们建立和模拟各种系统的动态行为。
通过Simulink,我们可以更好地理解和分析系统的行为,并进行系统设计和优化。
在实际工程中,Simulink的应用广泛,并在控制系统、信号处理等领域发挥着重要作用。

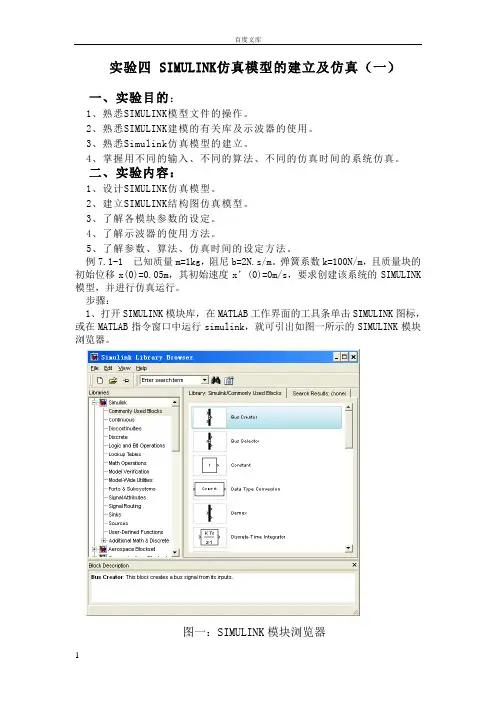
实验四 SIMULINK仿真模型的建立及仿真(一)一、实验目的:1、熟悉SIMULINK模型文件的操作。
2、熟悉SIMULINK建模的有关库及示波器的使用。
3、熟悉Simulink仿真模型的建立。
4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。
二、实验内容:1、设计SIMULINK仿真模型。
2、建立SIMULINK结构图仿真模型。
3、了解各模块参数的设定。
4、了解示波器的使用方法。
5、了解参数、算法、仿真时间的设定方法。
例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。
弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK 模型,并进行仿真运行。
步骤:1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。
图二:已经复制进库模块的新建模型窗3、从模块库复制所需模块到新建模型窗,分别在模块子库中找到所需模块,然后拖进空白模型窗中,如图二。
4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。
5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。
如图三所示:图三:已构建完成的新模型窗6、根据理论数学模型设置模块参数:①设置增益模块<Gain>参数,双击模型窗重的增益模块<Gain>,引出如图四所示的参数设置窗,把<Gain>增益栏中默认数字改为2,单击[OK]键,完成设置;图四:参数已经修改为2的<Gain>增益模块设置窗②参照以上方法把<Gain1>增益模块的增益系数改为100;③修改求和模块输入口的代数符号,双击求和模块,引出如图五所示的参数设置窗,把符号栏中的默认符号(++)修改成所需的代数符号(--),单击[OK]键,完成设置;图五:改变输入口符号的求和模块参数设置窗④对积分模块<Integrator1>的初始状态进行设置:双击积分模块<Integrator1>,引出如图六所示的参数设置窗,把初始条件Initial condition 栏中的默认0初始修改为题目给定的0.05,单击[OK]键,完成设置。
simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。

Matlab/Simulink通信系统建模与仿真实例分析教学设计一、教学目标本课程旨在通过【Matlab/Simulink通信系统建模与仿真实例分析】的教学,使学生掌握如下知识和能力:1.了解数字通信系统基本概念及其发展过程;2.掌握数字通信系统的建模方法和仿真技术;3.能够通过实例分析,掌握数字通信系统的性能分析方法;4.能够设计数字通信系统并进行仿真。
二、教学内容1. 数字通信系统概述•数字通信系统基本概念•数字通信系统的应用领域及其发展历程2. 数字通信系统建模方法•数字信号的基本特性•采样、量化和编码的基本原理•数字调制技术•误差控制编码技术3. 数字通信系统的仿真技术•Simulink仿真环境的基本概念和使用方法•通信系统仿真模型设计方法4. 数字通信系统的性能分析方法•常见数字通信系统的性能参数及其定义•数字通信系统的误码率分析方法5. 数字通信系统设计与仿真实例分析•基于Matlab/Simulink的通信系统建模和仿真实例分析三、教学方法本课程采用主题讲授和案例分析相结合的教学模式。
主要教学方法包括:1.讲授:教师通过课堂讲解授予基本概念、原理和技术,并采取案例分析的方法,使学生逐步领悟和掌握学习内容。
2.实验:采用Matlab/Simulink仿真软件进行数字通信系统建模和仿真实验。
3.课堂讨论:设计选题和应用实践案例的课堂讨论。
四、教学评估本课程的教学评估主要通过期末考试、实验报告和作业完成情况来进行。
1. 期末考试期末考试采用闭卷考试形式,主要测试学生对数码通信系统理论的掌握情况,考核内容覆盖课程中所讲述的主要内容。
2. 实验报告实验报告要求学生通过Matlab/Simulink仿真软件对数字通信系统进行建模和仿真,并撰写学习笔记和所完成实验的结果分析。
3. 作业完成情况教师将根据课堂讨论和布置的作业对学生的学习情况进行评估。
五、教学资源教师将为本课程提供以下教学资源:1.选取优秀的课程设计案例,供学生进行仿真和分析;2.为学生提供Matlab/Simulink仿真软件的操作指导和优秀的资源链接。
实验二PID调节器实验内容:SIMULINK建模仿真学生信息:自动化提交日期:2023年5月28日报告内容:PID调节器一、实验目的1.掌握仿真系统参数设置及子系统封装技术;2.分析PID调节器各参数对系统性能的影响。
二、实验设备1.计算机1台2.MATLAB 7.X软件1套。
三、实验原理说明1.建立新的simulink模块编辑界面,画出如图1所示的模块图。
对应的增益参数分别设为P和I,左击选中全部框图,右击菜单选择“creat subsystem”,变为图2。
图1:图2:2.右击图2中间的框图“Subsystem”,在右击的菜单中选择“Mask Subsystem”,出现下图。
先直接输入disp('PI调节器'),给待封装的子系统命名。
3.选择“Parameters”进行参数设置,点击按钮,添加参数,此参数必须与上文设置的参数对应,否则无效,如下图所示。
4.点击OK,完成子系统的封装。
双击PI调节器模块,出现参数设定对话框如下,可以进行参数调节。
四、实验步骤1.从continue模块集中拉出Derivative、Integrator以及从Math Operations模块集中拉出Gain模块,设计PID调节器,对PID调节器进行封装;2.建立Simulink原理图如下:3.双击PID调节器模块,调整调节器的各参数。
五、实验要求分析调节器各参数对系统性能的影响,撰写实验报告:1.P调节将PID调节器的积分增益和微分增益改为0,使其具有比例调节功能,对系统进行纯比例调节。
调整比例增益(P=0.5,2,5),观察响应曲线的变化。
图1 P=0.5时的阶跃信号及其响应图2 P=2时的阶跃信号及其响应图3 P=5时的阶跃信号及其响应P增大,系统在稳定时的静差减少。
2.PD调节调节器的功能改为比例微分调节,调整参数(P=2,D=0.1,0.5,2,5),观测系统的响应曲线。
图4 P=2,D=0.1时的阶跃信号及其响应图5 P=2,D=0.5时的阶跃信号及其响应图6 P=2,D=2时的阶跃信号及其响应图7 P=2,D=5时的阶跃信号及其响应D增大,系统将会快速收敛,同时系统静差会增大。
lms simulink 实例LMS Simulink是一种功能强大的工具,用于进行系统建模和仿真。
在本文中,我们将通过一个实例来展示Simulink的应用。
请注意,本文将以人类的视角进行写作,以增强阅读体验。
标题:使用LMS Simulink进行电机控制系统建模与仿真简介:电机控制是现代工业中常见的应用之一,它在许多领域中发挥着重要作用。
为了实现电机的精确控制,需要进行系统建模和仿真。
本文将介绍如何使用LMS Simulink来实现电机控制系统的建模和仿真。
1. 建立电机模型我们需要建立电机的数学模型。
在Simulink中,可以使用不同的模块来表示电机的各个组件,如电感、电阻、转子等。
通过将这些模块连接在一起,可以构建出完整的电机模型。
2. 设计控制算法接下来,我们需要设计控制算法,以实现对电机的精确控制。
在Simulink中,可以使用不同的控制模块来实现PID控制、模糊控制等算法。
通过将这些控制模块与电机模型连接在一起,可以实现电机的闭环控制。
3. 仿真与分析完成模型的建立和控制算法的设计后,我们可以进行仿真和分析。
在Simulink中,可以设置仿真参数,如仿真时间、输入信号等。
通过运行仿真,可以获取电机系统在不同条件下的响应,并进行性能评估和优化。
4. 结果与讨论根据仿真结果,我们可以对电机控制系统的性能进行评估和分析。
通过调整控制算法的参数,可以优化系统的响应速度、稳定性等指标。
同时,还可以通过仿真结果来验证模型的准确性和可靠性。
结论:本文介绍了使用LMS Simulink进行电机控制系统建模和仿真的基本步骤。
通过建立电机模型、设计控制算法、进行仿真和分析,可以实现对电机的精确控制。
Simulink提供了丰富的模块和功能,使得系统建模和仿真变得更加简单和高效。
希望本文能够对读者理解和应用Simulink具有一定的帮助。
以上是关于使用LMS Simulink进行电机控制系统建模与仿真的文章创作。