工程力学(天津大学)第4章答案
- 格式:doc
- 大小:628.50 KB
- 文档页数:30

第一章习题下列习题中,凡未标出自重的物体,质量不计。
接触处都不计摩擦。
1-1试分别画出下列各物体的受力图。
1-2试分别画出下列各物体系统中的每个物体的受力图。
1-3试分别画出整个系统以及杆BD,AD,AB(带滑轮C,重物E和一段绳索)的受力图。
1-4构架如图所示,试分别画出杆HED,杆BDC及杆AEC的受力图。
1-5构架如图所示,试分别画出杆BDH,杆AB,销钉A及整个系统的受力图。
1-6构架如图所示,试分别画出杆AEB,销钉A及整个系统的受力图。
1-7构架如图所示,试分别画出杆AEB,销钉C,销钉A及整个系统的受力图。
1-8结构如图所示,力P作用在销钉C上,试分别画出AC,BCE及DEH 部分的受力图。
参考答案1-1解:1-2解:1-3解:1-4解:1-5解:1-6解:1-7解:1-8解:第二章习题参考答案2-1解:由解析法,故:2-2解:即求此力系的合力,沿OB建立x坐标,由解析法,有故:方向沿OB。
2-3解:所有杆件均为二力杆件,受力沿直杆轴线。
(a)由平衡方程有:联立上二式,解得:(拉力)(压力)(b)由平衡方程有:联立上二式,解得:(拉力)(压力)(c)由平衡方程有:联立上二式,解得:(拉力)(压力)(d)由平衡方程有:联立上二式,解得:(拉力)(拉力)2-4解:(a)受力分析如图所示:由由(b)解:受力分析如图所示:由联立上二式,得:2-5解:几何法:系统受力如图所示三力汇交于点D,其封闭的力三角形如图示所以:(压力)(与X轴正向夹150度)2-6解:受力如图所示:已知,,由由2-7解:受力分析如图所示,取左半部分为研究对象由联立后,解得:由二力平衡定理2-8解:杆AB,AC均为二力杆,取A点平衡由联立上二式,解得:(受压)(受压)2-9解:各处全为柔索约束,故反力全为拉力,以D,B点分别列平衡方程(1)取D点,列平衡方程由(2)取B点列平衡方程由2-10解:取B为研究对象:由取C为研究对象:由由联立上二式,且有解得:取E为研究对象:由故有:2-11解:取A点平衡:联立后可得:取D点平衡,取如图坐标系:由对称性及2-12解:整体受力交于O点,列O点平衡由联立上二式得:(压力)列C点平衡联立上二式得:(拉力)(压力)2-13解:(1)取DEH部分,对H点列平衡联立方程后解得:(2)取ABCE部分,对C点列平衡且联立上面各式得:(3)取BCE部分。
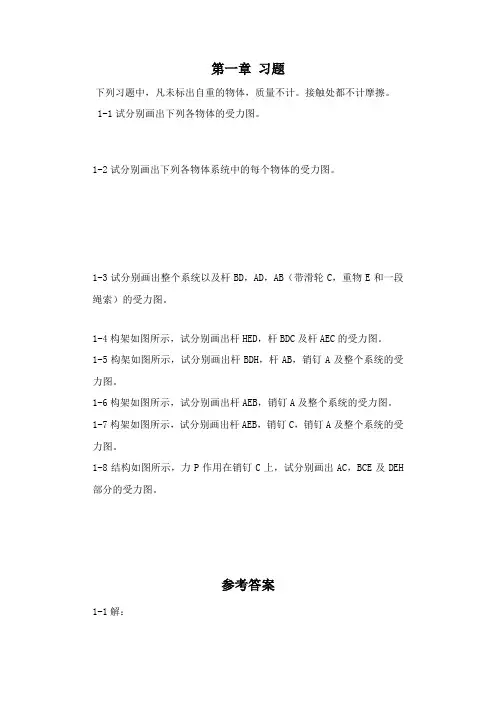
3-10 求图示多跨梁支座A 、C 处的约束力。
已知M =8kN ·m ,q =4kN/m ,l =2m 。
解:(1)取梁BC 为研究对象。
其受力如图(b)所示。
列平衡方程 (2)取整体为研究对象。
其受力如图(c)所示。
列平衡方程3-11 组合梁 AC 及CD 用铰链C 连接而成,受力情况如图(a)所示。
设F =50kN ,q =25kN/m ,力偶矩M =50kN ·m 。
求各支座的约束力。
F BkN1842494902332,0=⨯⨯===⨯⨯-⨯=∑ql F ll q l F M C C B kN624318303,0=⨯⨯+-=+-==⨯-+=∑ql F F l q F F F C A C A ymkN 32245.10241885.10405.334,022⋅=⨯⨯+⨯⨯-=+⨯-==⨯⨯-⨯+-=∑ql l F M M l l q l F M M MC A C A A解:(1)取梁CD 为研究对象。
其受力如图(c)所示。
列平衡方程(2)取梁AC 为研究对象。
其受力如图(b)所示,其中F ′C =F C =25kN 。
列平衡方程F C(b)(c)´CkN 25450252420124,0=+⨯=+==-⨯⨯-⨯=∑M q F M q F MD D CkN 25450256460324,0=-⨯=-==-⨯⨯+⨯-=∑M q F M q F MC C D)kN(25225225250222021212,0↓-=⨯-⨯-='--==⨯'-⨯⨯-⨯+⨯-=∑CA C A BF q F F F q F F MkN150225425650246043212,0=⨯+⨯+='++==⨯'-⨯⨯-⨯-⨯=∑CB CB AF q F F F q F F M6−1作图示杆件的轴力图。
解:在求AB 段内任一截面上的轴力时,在任一截面1−1处截断,取左段为脱离体(图c ),并设轴力F N1为拉力。
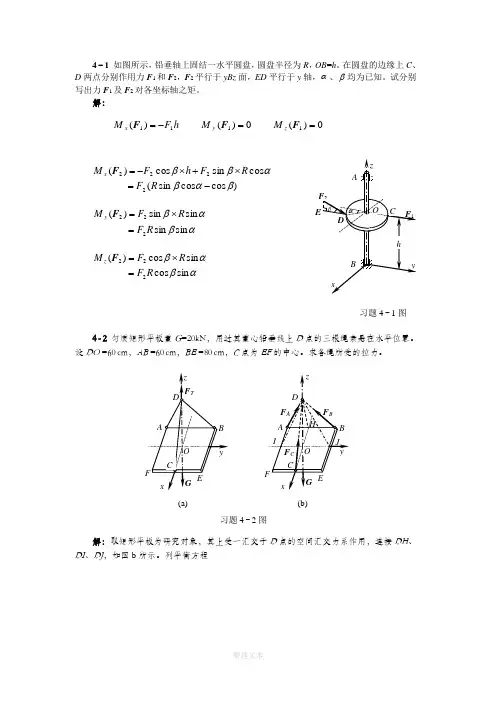
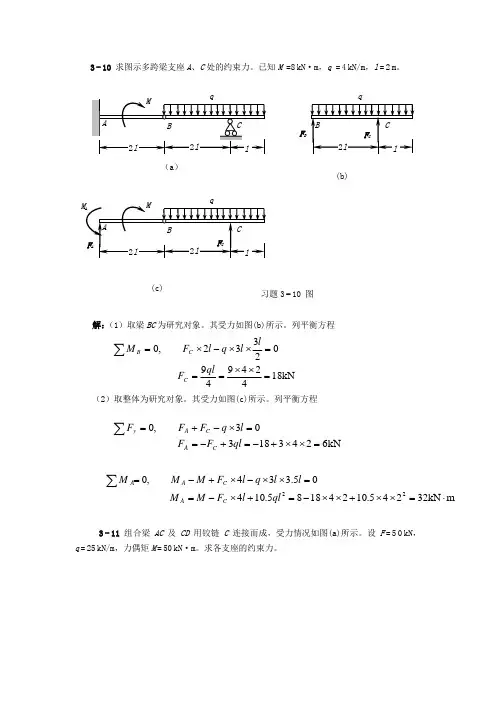
4-1 如图所示,铅垂轴上固结一水平圆盘,圆盘半径为R ,OB =h 。
在圆盘的边缘上C 、D 两点分别作用力F 1和F 2,F 2平行于yBz 面,ED 平行于y 轴,α、β均为已知。
试分别写出力F 1及F 2对各坐标轴之矩。
解:)cos cos sin (cos sin cos )(2222βαβαββ-=⨯+⨯-=R F R F h F M x Fαβαβsin sin sin sin )(222R F R F M y =⨯=Fαβαβsin cos sin cos )(222R F R F M z =⨯=F4-2 匀质矩形平板重G =20kN ,用过其重心铅垂线上D 点的三根绳索悬在水平位置。
设DO =60cm ,AB =60cm ,BE =80cm ,C 点为EF 的中心。
求各绳所受的拉力。
解:取矩形平板为研究对象,其上受一汇交于D 点的空间汇交力系作用,连接DH 、DI 、DJ ,如图b 所示。
列平衡方程)(0)()(1111==-=F F F z y x M M h F M(a)(b)由(1)(2)(3)式联立解得4-3图示空间构架由三根无重直杆组成,在D 端用球铰链连接,A 、B 和C 端则用球铰链固定在水平地面上。
如果挂在D 端的物重P =10kN ,试求铰链A 、B 和C 的约束力。
解:取空间构架及物体为研究对象,受力如图(b )所示。
建立坐标系如图,列平衡方程由(1)、(2)、(3)式联立解得kN02.12kN 51.6===C B A F F F ()()()302052106061106061106000205210406110406110400,01,,0,0=-++=-++==-+=-+==∴===-=∑∑∑C B A C B A zC B A C B AxBA B A yF F FG DC DO F DB DO F DA DO F FF F F DO COF BD BJ F AD AI F FF F BD AD BH AH BD BHF AD AH F F Θ(a)(b)0cos 45cos 450(1)0sin 45cos30sin 45cos30cos150(2)0sin 45sin 30sin 45sin 30sin150(3)x A B yA B C zA B C FF F F F F F FF F FG =-︒+︒==-︒⨯︒-︒⨯︒-︒==-︒⨯︒-︒⨯︒-︒-=∑∑∑26.39kN 33.46kNA B C F F F ==-=4-4 挂物架如图所示,不计重量的三杆用球铰链连接于O ,平面BOC 是水平面,且OB =OC ,角度如图。
![423002[工程力学] 天津大学考试题库及答案](https://uimg.taocdn.com/8c50bb19b9d528ea81c779bd.webp)
工程力学复习题三铰拱刚架如图所示,受一力偶作用,其矩M=50kN·m ,不计自重,试求A 、B 处的约束反力。
答案:AC 杆为二力杆受力图如(a)所示。
再画整体受力图,如(b)图所示。
Σm=0 R A ·AD=M ∴R A =R B =M AD=50422=17.7kN方向如图所示。
如图所示为二杆桁架,1杆为钢杆,许用应力[σ]1=160MPa ,横截面面积A 1=6cm 2;2杆为木杆,其许用压应力[σ]2=7MPa ,横截面面积A 2=100cm 2。
如果载荷P=40kN ,试校核结构强度。
答案:两杆均为二力杆,取结点A为研究对象,受力图如图所示。
Σy=0,N1sin30°-P=0∴N1=P/sin30°=80kNΣx=0,-N1cos30°+N2=0∴N2=N1cos30°=69.3kN1杆:σ1=NA11328010610=⨯⨯=133MPa<[σ]12杆:σ2=NA22326931010010=⨯⨯.=6.93MPa<[σ]2分析如图所示体系的几何构造。
答案:去掉与地基的连接,只考虑上部结构,几何不变体系,且没有多余约束。
分析如图所示体系的几何构造。
答案:从A点开始依次去掉二元体,可知为几何不变体系且无多余约束。
分析如图所示体系的几何构造。
答案:将折杆画成直杆,上部结构为一个刚片, 用四杆与地基相连。
几何不变有一个多余约束。
求简支梁中点K的竖向位移,EI=常数。
答案:荷载作用的实状态和虚设单位力状态弯矩图分别如图所示:图乘法求得中K 竖向位移:用力法计算下图所示超静定刚架,并作出内力图。
答案:原结构为1次超静定结构。
选取基本体系如图(a)所示,基本方程为1111P 0X δ∆+=。
系数和自由项分别为31156l EIδ=,1P 0∆= 答案得10X =。
内力图分别如图(d)~(f)所示。
2EI EIEIq q1X X 1=1l lll82ql 82ql 2ql 2ql 2ql 2ql P 1图(a) 基本体系M 图M (b)(c)F Q N 图F 图(f)(e)M 图(d)用力法计算下图所示超静定刚架,并作出内力图。
新视野大学英语课后习题答案1-4册全集&tid=6423&fromuid=562806《毛泽东思想和中国特色社会主义理论体系概论》有史以来最全面的复习资料!!!&tid=5900&fromuid=562806中国近现代史纲要课后题答案&tid=5310&fromuid=562806新视野大学英语第四册答案(第二版)&tid=5161&fromuid=562806新视野大学英语视听说第三册答案&tid=2647&fromuid=562806《物理化学》习题解答(天津大学, 第四版,106张)&tid=2531&fromuid=562806新视野大学英语听说教程1听力原文及答案下载&tid=2006&fromuid=562806西方宏观经济高鸿业第四版课后答案&tid=1282&fromuid=562806大学英语综合教程 1-4册练习答案&tid=1275&fromuid=562806新视野大学英语课本详解(四册全)&tid=805&fromuid=562806新视野大学英语读写教程3册的课后习题答案&tid=514&fromuid=562806毛邓三全部课后思考题答案(高教版)/毛邓三课后答案&tid=384&fromuid=562806《宏观经济学》资料包集合(PPT讲稿+案例+课后答案)[主用教材:N·格里高利·曼昆的]&tid=305&fromuid=562806《会计学原理》同步练习题答案&tid=304&fromuid=562806《管理学》课后答案(周三多)&tid=301&fromuid=562806《成本会计》习题及答案(自学推荐,23页)&tid=300&fromuid=562806《成本会计》配套习题集参考答案&tid=294&fromuid=562806《现代西方经济学(微观经济学)》笔记与课后习题详解(第3版,宋承先)&tid=290&fromuid=562806《国际贸易》课后习题答案(海闻 P.林德特王新奎)&tid=289&fromuid=562806《西方经济学》习题答案(第三版,高鸿业)可直接打印&tid=283&fromuid=562806《微观经济学》课后答案(高鸿业版)&tid=280&fromuid=562806《管理学》经典笔记(周三多,第二版)&tid=277&fromuid=562806《教育心理学》课后习题答案(皮连生版)&tid=268&fromuid=562806《信号与系统》习题答案(第四版,吴大正)&tid=262&fromuid=562806《计算机操作系统》习题答案(汤子瀛版,完整版)&tid=260&fromuid=562806高等数学习题答案及提示&tid=258&fromuid=562806《生物化学》复习资料大全(3套试卷及答案+各章习题集)&tid=249&fromuid=562806《概率论与数理统计》8套习题及习题答案(自学推荐)&tid=244&fromuid=562806《线性代数》9套习题+9套相应答案(自学,复习推荐)&tid=236&fromuid=562806《高分子化学》课后习题答案(第四版,潘祖仁主编)&tid=232&fromuid=562806《电工学》课后习题答案(第六版,上册,秦曾煌主编)&tid=217&fromuid=562806《大学物理》完整习题答案&tid=203&fromuid=562806《通信原理》课后习题答案及每章总结(樊昌信,国防工业出版社,第五版)&tid=195&fromuid=562806《化工原理答案》课后习题答案(高教出版社,王志魁主编,第三版)&tid=191&fromuid=562806《工程力学》课后习题答案(梅凤翔主编)&tid=186&fromuid=562806《中国近代史纲要》课后习题答案&tid=182&fromuid=562806《概率论与数理统计》优秀学习资料&tid=181&fromuid=562806《中国近现代史》选择题全集(共含250道题目和答案)&tid=178&fromuid=562806《概率论与数理统计及其应用》课后答案(浙江大学盛骤谢式千编著)&tid=174&fromuid=562806《数字信号处理——基于计算机的方法》习题答案(第二版)&tid=173&fromuid=562806《数据结构习题集》答案(C版,清华大学,严蔚敏)&tid=172&fromuid=562806《大学物理基础教程》课后习题答案(第二版,等教育出版社)&tid=170&fromuid=562806C语言资料大全(有课后答案,自学资料,C程序等)&tid=168&fromuid=562806《新编大学英语》课后答案(第三册)&tid=164&fromuid=562806《电力电子技术》习题答案(第四版,王兆安,王俊主编)&tid=163&fromuid=562806《中级财务会计》习题答案(第二版,刘永泽)&tid=162&fromuid=562806《常微分方程》习题解答(王高雄版)&tid=161&fromuid=562806《C++程序设计》课后习题答案(第2版,吴乃陵,高教版)&tid=158&fromuid=562806《机械制图》习题册答案(近机类、非机类,清华大学出版社)&tid=143&fromuid=562806《物理化学》习题答案(南大,第五版)&tid=142&fromuid=562806《高频电子线路》习题参考答案(第四版)&tid=138&fromuid=562806《宏观经济学》课后答案(曼昆,中文版)&tid=137&fromuid=562806《电路》习题答案上(邱关源,第五版)&tid=136&fromuid=562806《信息论与编码》辅导PPT及部分习题答案(曹雪虹,张宗橙,北京邮电大学出版社)&tid=122&fromuid=562806《分析化学》课后习题答案(第五版,高教版)&tid=112&fromuid=562806《电工学》习题答案(第六版,秦曾煌)&tid=102&fromuid=562806《离散数学》习题答案(高等教育出版社)&tid=96&fromuid=562806《机械设计》课后习题答案(高教版,第八版,西北工业大学)&tid=90&fromuid=562806《数字电子技术基础》习题答案(阎石,第五版)&tid=85&fromuid=562806曼昆《经济学原理》课后习题解答&tid=83&fromuid=562806《流体力学》习题答案&tid=81&fromuid=562806《中国近代史纲要》完整课后答案(高教版)&tid=78&fromuid=562806《全新版大学英语综合教程》(第四册)练习答案及课文译文&tid=77&fromuid=562806《全新版大学英语综合教程》(第三册)练习答案及课文译文&tid=76&fromuid=562806《全新版大学英语综合教程》(第二册)练习答案及课文译文&tid=75&fromuid=562806《全新版大学英语综合教程》(第一册)练习答案及课文译文&tid=74&fromuid=562806《信号与线性系统分析》习题答案及辅导参考(吴大正版)&tid=69&fromuid=562806《有机化学》习题答案(汪小兰主编)&tid=66&fromuid=562806高等数学上下《习题PPT》&tid=63&fromuid=562806思想道德修养与法律基础课后习题答案&tid=61&fromuid=562806新编大学英语4(外研版)课后练习答案&tid=60&fromuid=562806西方经济学(高鸿业版)教材详细答案&tid=59&fromuid=562806《c语言程序与设计》习题答案(谭浩强,第三版)&tid=58&fromuid=562806《数字信号处理》课后答案及详细辅导(丁美玉,第二版)&tid=57&fromuid=562806《概率论与数理统计》习题答案&tid=55&fromuid=562806《理论力学》课后习题答案&tid=52&fromuid=562806《自动控制原理》课后题答案(胡寿松,第四版)&tid=50&fromuid=562806《物理学》习题分析与解答(马文蔚主编,清华大学,第五版)&tid=48&fromuid=562806《毛泽东思想和中国特色社会主义理论体系概论》习题答案(2008年修订版的)&tid=47&fromuid=562806完整的英文原版曼昆宏观、微观经济学答案&tid=46&fromuid=562806离散数学习题解答(第四版)清华大学出版社&tid=45&fromuid=562806《电机与拖动基础》课后习题答案(第四版,机械工业出版社,顾绳谷主编)&tid=44&fromuid=562806《现代通信原理》习题答案(曹志刚版)&tid=43&fromuid=562806《土力学》习题解答/课后答案&tid=42&fromuid=562806《模拟电子技术基础》详细习题答案(童诗白,华成英版,高教版)&tid=41&fromuid=562806《模拟电子技术基础简明教程》课后习题答案(杨素行第三版)&tid=38&fromuid=562806《数学物理方法》习题解答案详细版(梁昆淼,第二版)&tid=37&fromuid=562806《马克思主义基本原理概论》新版完整答案&tid=36&fromuid=562806《单片机原理及应用》课后习题答案(张毅刚主编,高教版)&tid=35&fromuid=562806机械设计课程设计——二级斜齿圆柱齿轮减速器(WORD+原图)&tid=34&fromuid=562806《管理运筹学》第二版习题答案(韩伯棠教授)&tid=31&fromuid=562806《材料力学》详细辅导及课后答案(PDF格式,共642页)&tid=29&fromuid=562806《统计学》课后答案(第二版,贾俊平版)&tid=28&fromuid=562806谢希仁《计算机网络教程》(第五版)习题参考答案(共48页)&tid=25&fromuid=562806《大学基础物理学》课后答案(共16个单元)&tid=23&fromuid=562806机械设计基础(第五版)习题答案[杨可桢等主编]&tid=22&fromuid=562806流体力学课后答案(高教版,张也影,第二版)&tid=21&fromuid=562806《模拟电子技术基础》课后习题答案(共10章)&tid=20&fromuid=562806《液压传动》第2版思考题和习题解答(共36页)&tid=18&fromuid=562806高等数学(同济第五版)课后答案(PDF格式,共527页)&tid=17&fromuid=562806《线性代数》(同济第四版)课后习题答案(完整版)&tid=16&fromuid=562806《新视野大学英语读写教程(第二版)第三册》课后答案&tid=15&fromuid=562806《新视野大学英语读写教程(第二版)第二册》课后答案&tid=14&fromuid=562806新视野大学英语读写教程(第二版)第一册》课后答案&tid=13&fromuid=562806统计学原理作业及参考答案&tid=9&fromuid=562806大学英语精读第3册答案(外教社)&tid=8&fromuid=562806大学数学基础教程课后答案(微积分)&tid=7&fromuid=56280621世纪大学英语读写教程(第四册)课后答案&tid=6&fromuid=56280621世纪大学英语读写教程(第三册)课文翻译&tid=5&fromuid=56280621世纪大学英语读写教程(第三册)参考答案&tid=4&fromuid=56280621世纪大学实用英语综合教程(第一册)课后答案及课文翻译&tid=3&fromuid=562806程守洙、江之永主编《普通物理学》(第五版)详细解答及辅导更多资料可以进入【】下载。
《新视野大学英语读写教程(第二版)第三册》课后答案新视野大学英语读写教程(第二版)第一册》课后答案《马·克思主·义大体原理概论》新版完整答案《毛·泽东思想和中国特色社会主·义理论体系概论》习题答案(2020年修订版的)21世纪大学实用英语综合教程(第一册)课后答案及课文翻译西方经济学(高鸿业版)教材详细答案《新视野大学英语读写教程(第二版)第二册》课后答案思想道德修养与法律基础课后习题答案《中国近代史纲要》完整课后答案(高教版)《全新版大学英语综合教程》(第三册)练习答案及课文译文《全新版大学英语综合教程》(第一册)练习答案及课文译文《会计学原理》同步练习题答案《微观经济学》课后答案(高鸿业版)《统计学》课后答案(第二版,贾俊平版)《西方经济学》习题答案(第三版,高鸿业)可直接打印毛邓三全部课后思考题答案(高教版)/毛邓三课后答案新视野大学英语听说教程1听力原文及答案下载西方宏观经济高鸿业第四版课后答案《管理学》经典笔记(周三多,第二版)《中国近代史纲要》课后习题答案《理论力学》课后习题答案《线性代数》(同济第四版)课后习题答案(完整版)高等数学(同济第五版)课后答案(PDF格式,共527页)中国近现代史纲要课后题答案曼昆《经济学原理》课后习题解答21世纪大学英语读写教程(第三册)参考答案谢希仁《计算机网络教程》(第五版)习题参考答案(共48页)《概率论与数理统计》习题答案《模拟电子技术基础》详细习题答案(童诗白,华成英版,高教版)《机械设计》课后习题答案(高教版,第八版,西北工业大学)《大学物理》完整习题答案《管理学》课后答案(周三多)机械设计基础(第五版)习题答案[杨可桢等主编]程守洙、江之永主编《普通物理学》(第五版)详细解答及辅导新视野大学英语课本详解(四册全)21世纪大学英语读写教程(第四册)课后答案新视野大学英语读写教程3册的课后习题答案新视野大学英语第四册答案(第二版)《中国近现代史》选择题全集(共含250道题目和答案)《电工学》课后习题答案(第六版,上册,秦曾煌主编)完整的英文原版曼昆宏观、微观经济学答案《数字电子技术基础》习题答案(阎石,第五版)《电路》习题答案上(邱关源,第五版)《电工学》习题答案(第六版,秦曾煌)21世纪大学英语读写教程(第三册)课文翻译《生物化学》复习资料大全(3套试卷及答案+各章习题集)《模拟电子技术基础》课后习题答案(共10章)《概率论与数理统计及其应用》课后答案(浙江大学盛骤谢式千编著)《理论力学》课后习题答案(赫桐生,高教版)《全新版大学英语综合教程》(第四册)练习答案及课文译文《化工原理答案》课后习题答案(高教出版社,王志魁主编,第三版)《国际贸易》课后习题答案(海闻P.林德特王新奎)大学英语综合教程1-4册练习答案《流体力学》习题答案《传热学》课后习题答案(第四版)高等数学习题答案及提示《高分子化学》课后习题答案(第四版,潘祖仁主编)马·克思主·义大体原理概论答案《计算机网络》课后习题解答(谢希仁,第五版)《概率论与数理统计》优秀学习资料《离散数学》习题答案(高等教育出版社)《模拟电子技术基础简明教程》课后习题答案(杨素行第三版)《信号与线性系统分析》习题答案及辅导参考(吴大正版)《教育心理学》课后习题答案(皮连生版)《理论力学》习题答案(动力学和静力学)选修课《中国现当代文学》资料包机械设计课程设计——二级斜齿圆柱齿轮减速器(WORD+原图)《成本会计》配套习题集参考答案《概率论与数理统计》8套习题及习题答案(自学推荐)《现代西方经济学(微观经济学)》笔记与课后习题详解(第3版,宋承先)《计算机操作系统》习题答案(汤子瀛版,完整版)《毛·泽东思想和中国特色社会主·义理论体系概论》有史以来最全面的温习资料!!!《线性代数》9套习题+9套相应答案(自学,复习推荐)《管理理论与实务》课后题答案(手写版,中央财经大学,赵丽芬)统计学原理作业及参考答案机械设计课程设计——带式运输机的传动装置的设计《物理学》习题分析与解答(马文蔚主编,清·华大学,第五版)《新编大学英语》课后答案(第三册)《通信原理》课后习题答案及每章总结(樊昌信,国防工业出版社,第五版)《c语言程序与设计》习题答案(谭浩强,第三版)《微生物学》课后习题答案(周德庆版)新视野第二版全四册听说教程答案《宏观经济学》课后答案(曼昆,中文版)《电力电子技术》习题答案(第四版,王兆安,王俊主编)《土力学》习题解答/课后答案《公司法》课后练习及参考答案《全新版大学英语综合教程》(第二册)练习答案及课文译文新视野大学英语视听说第三册答案《工程力学》课后习题答案(梅凤翔主编)《理论力学》详细习题答案(第六版,哈工大出版社)《成本会计》习题及答案(自学推荐,23页)《自动控制原理》课后题答案(胡寿松,第四版)《复变函数》习题答案(第四版)《信号与系统》习题答案(第四版,吴大正)《有机化学》课后答案(第二版,高教版,徐寿昌主编)《电工学——电子技术》习题答案(下册)《财务管理学》章后练习参考答案(人大出版,第四版)现代汉语题库(语法部分)及答案《概率论与数理统计》习题详解(浙大二、三版通用)《有机化学》习题答案(汪小兰主编)《微机原理及应用》习题答案《管理运筹学》第二版习题答案(韩伯棠教授)《古代汉语》习题集(附习题答案)福建人民出版社《金融市场学》课后习题答案(张亦春,郑振龙,第二版)《公共关系学》习题及参考答案(复习必备)现代汉语通论(邵敬敏版)词汇语法课后练习答案《国际经济学》教师手册及课后习题答案(克鲁格曼,第六版)《教育技术》课后习题答案参考(北师大)《金融市场学》课后答案(郑振龙版)《组织行为学》习题集答案(参考下,还是蛮好的)《分析化学》课后习题答案(第五版,高教版)大学英语精读第3册答案(外教社)《国际经济学》习题答案(萨尔瓦多,英文版)《复变函数与积分变换》习题答案《信息论与编码》辅导PPT及部分习题答案(曹雪虹,张宗橙,北京邮电大学出版社)《宏观经济学》习题答案(第七版,多恩布什)《物理化学》习题解答(天津大学, 第四版,106张)新视野大学英语视听说教程第一册《机械制造技术》习题集与答案解析新视野大学英语听说教程2册听力原文及答案下载管理学试题(附答案)《材料力学》详细辅导及课后答案(PDF格式,共642页)六级词汇注解《大学基础物理学》课后答案(共16个单元)《管理学——原理与方式》课后习题答案新视野2版第三册(大2上学期用)曼昆《经济学原理》中文第四版.课后习题答案-清晰图片版《数据库系统概论》课后习题(第四版)大学数学基础教程课后答案(微积分)《投资学》课后习题答案(博迪,第四版)流体力学课后答案(高教版,张也影,第二版)《语言学概论》习题答案(自考,新版教材)《统计学》各章练习题答案《数字电子技术基础》课后习题答案(完整答案版)《积分变换》习题答案(配套东南大学张元林编的)《中级财务会计》习题答案(第二版,刘永泽)《计算机网络》课后习题答案(第5版和第4版)《单片机原理及应用》课后习题答案(张毅刚主编,高教版)《金融工程》课后题答案(郑振龙版)《液压传动》第2版思考题和习题解答(共36页)《动物学》习题集与答案(资料相当丰富)《高频电子线路》习题参考答案(第四版)《国际经济法》课后参考答案大学英语四级十年真题+听力《信号与系统》习题详解(奥本海姆版)《电路分析》课后答案及学习指导(第二版,胡翔骏,高教版)《C语言设计》(谭浩强,第三版)227页新视野大学英语课后习题答案1-4册全集《数字电路与逻辑设计》课后习题答案,讲解详细《电路》第五版课后答案《材料力学》详细习题答案及辅导(第四版,刘鸿文)《传播学教程》课后答案(郭庆光主编,完整版)《物理化学》习题答案与课件集合(南大)《金融市场学》电子书(张亦春,郑振龙,第二版)毛邓三95%考点高等教育出版社《毛·泽东思想和中国特色社会主·义道路》(09版,原毛邓三)课后题答案《线性代数》课后习题答案(陈维新,科学出版社)自动控制原理习题集(自学辅导推荐)《现代通信原理》习题答案(曹志刚版)高等数学上下《习题PPT》《数据结构习题集》答案(C版,清·华大学,严蔚敏)《大学物理学》习题解答《物理化学》习题答案(南大,第五版)《机械原理》复习精要与习题精解(第7版,西北大学)《宏观经济学》答案(曼昆,第五版,英文版)pdf格式《化工热力学》习题与习题答案(含各种版本)《材料力学》习题答案教育统计与测量管理心理学(自考必备资料,牛逼打印版)离散数学习题解答(第四版)清·华大学出版社货币银行学《技术经济学概论》(第二版)习题答案《毛·泽东思想和社会主·义建设理论题概论》精炼考试题目,耐心整理《数字信号处理》课后答案及详细辅导(丁美玉,第二版)《语言学概论练习题》答案《会计电算化》教材习题答案(09年)《数据库系统概论》习题答案(第四版)《微观经济学》课后答案(平狄克版)《控制工程基础》课后习题解答(清·华版)《高分子化学》习题答案(第四版)《电机与拖动基础》课后习题答案(第四版,机械工业出版社,顾绳谷主编)《机械工程测试技术基础》(第三版,熊诗波等主编)课后答案《宏观经济学》课后答案(布兰查德版)《机械原理》习题答案和超多例题(西北工业大学,第六版)《大学物理基础教程》课后习题答案(第二版,等教育出版社)简明乐谱基础知识《语言学教程》课后答案《公司理财》课后答案(英文版,第六版)《信息论与编码》学习辅导及习题详解(傅祖芸版)《遗传学》课后习题答案(朱军主编,完整版)现代人心理实战700题处世韬略《自动控制原理》习题答案《普通动物学》完整课后答案(刘凌云,郑光美版)《微机原理》作业答案(李继灿版)尼尔·波兹曼《娱乐至死》《电力电子技术》习题答案(第4版,西安交通大学)大学英语四级(CET-4)历年真题大全[89-07年39套](精品级)753页word 《通信原理》习题答案《普通化学(第五版)》习题详解(配套浙大编的)经济法课后复习及思考答案《结构化学基础》习题答案(周公度,北大版)财务管理学课后答案荆新王化成《C++程序设计》课后习题答案(第2版,吴乃陵,高教版)药用植物的两份习题(自己感觉比较有用)《数学物理方法》习题解答案详细版(梁昆淼,第二版)《机械制图》习题册答案(近机类、非机类,清·华大学出版社)《控制工程基础》习题答案(第二版,燕山大学)《画法几何》资料包(含习题答案,自学辅导课件)《畜禽解剖学与组织胚胎学》习题答案参考《统计学》课后习题答案(周恒彤编)《西方经济学简明教程》课后习题全解(尹伯成,上海人民出版社)《汽车理论》课后答案详细解答(余志生,机械工业出版社)《数学物理方法》(第三版)习题答案新视野听力原文及课后答案新编大学英语4(外研版)课后练习答案《材料力学》习题答案(单辉祖,北京航空航天大学)大学英语精读第3册课文及课后答案《自动控制原理》课后习题答案———胡寿松,第五版《数据库系统原理与设计》课后答案(第四版,王珊,萨师煊)《数字电子技术基础》详细习题答案(阎石第四版)财经应用文笔记《管理学》课后习题答案(罗宾斯,人大版,第7版)《概率论与数理统计》习题答案(复旦大学出版社)《数字信号处理——基于运算机的方式》习题答案(第二版)《传热学》课后答案(杨世铭,陶文铨主编,高教版)C语言资料大全(有课后答案,自学资料,C程序等)毛邓三重点归纳《电力拖动自动控制系统》习题答案逄锦聚《政治经济学》(第3版)笔记和课后习题详解《概率论与数理统计》课后习题解答(东南大学出版社)《有机化学》课后习题答案(胡宏纹,第三版)《常微分方程》习题解答(王高雄版)▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆【因为太多了,没方法再粘贴到那个地址了,更多答案,直接进入下面那个搜索就好】源地址:||。
![423002[工程力学] 天津大学考试 参考资料答案](https://uimg.taocdn.com/42c7255e1a37f111f0855b97.webp)
工程力学复习题参考的答案 天津大学1、利用对称性,计算下图所示各结构的内力,并绘弯矩图。
解:取半结构如图(a)所示,为2次超静定结构。
再取半结构的基本体系如图(b)所示,基本方程为1111221P 2112222P 00X X X X δδ∆δδ∆++=⎧⎪⎨++=⎪⎩ 系数和自由项分别为119EIδ=,1221552EIδδ==,223613EIδ=,1P 13603EI ∆=,2P 1900EI∆=解得17.04kN X =-,214.18kN X =-。
原结构弯矩图如图(f)所示。
C BA10kN/m4m3m4mCBA10kN/m2X1X1X=1112X=133710kN/m80807.04202030.4230.4230.4230.4226.326.31(b) 基本体系M图(c)(a) 半结构PM(e)M图(kN·m)(f)2M图(d)图(kN·m)2、用结点法或截面法求图示桁架各杆的轴力。
解:(1)判断零杆(12根)。
(2)节点法进行内力计算,结果如图。
3、分析如图所示体系的几何构造。
解:从A点开始依次去掉二元体,可知为几何不变体系且无多余约束。
4、试求图示刚架在水压力作用下C、D两点的相对水平位移,各杆EI为常数。
解:(1)作荷载作用下弯矩图:在C、D两点加一对反向的单位水平力,并作弯矩图如下:则:5、某条形基础,宽B=2m ,埋深d=1m 。
基底附加压力p=100kPa ,基底至下卧层顶面的距离Z=2m ,下卧层顶面以上土的重度3/20m kN =γ,经修正后,下卧层地基承载力设计值kPa f 110=,扩散角 22=θ,试通过计算,验算下卧层地基承载力是否满足要求?(4.0tan =θ) 解:kPa d cz 60203)2(=⨯=⨯+=γσ kPa Z b b p z 6.554.02222100tan 20=⨯⨯+⨯=⨯+⨯=θσf kPa z cz >=+=+6.115606.55σσ,故不能满足要求。
大学教材课后习题答案大全▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆《新视野大学英语读写教程(第二版)第三册》课后答案http:新视野大学英语读写教程(第二版)第一册》课后答案http:《马·克思主·义基本原理概论》新版完整答案http:《毛·泽东思想和中国特色社会主·义理论体系概论》习题答案(2008年修订版的)http:21世纪大学实用英语综合教程(第一册)课后答案及课文翻译http:西方经济学(高鸿业版)教材详细答案http:《新视野大学英语读写教程(第二版)第二册》课后答案http:思想道德修养与法律基础课后习题答案http:《中国近代史纲要》完整课后答案(高教版)http:《全新版大学英语综合教程》(第三册)练习答案及课文译文http:《全新版大学英语综合教程》(第一册)练习答案及课文译文http:《会计学原理》同步练习题答案http:《微观经济学》课后答案(高鸿业版)http:《统计学》课后答案(第二版,贾俊平版)http:《西方经济学》习题答案(第三版,高鸿业)可直接打印http:毛邓三全部课后思考题答案(高教版)/毛邓三课后答案http:新视野大学英语听说教程1听力原文及答案下载http:西方宏观经济高鸿业第四版课后答案http:《管理学》经典笔记(周三多,第二版)http:《中国近代史纲要》课后习题答案http:《理论力学》课后习题答案http:《线性代数》(同济第四版)课后习题答案(完整版)http:高等数学(同济第五版)课后答案(PDF格式,共527页)http:中国近现代史纲要课后题答案http:曼昆《经济学原理》课后习题解答http:21世纪大学英语读写教程(第三册)参考答案http:谢希仁《计算机网络教程》(第五版)习题参考答案(共48页)http:《概率论与数理统计》习题答案http:《模拟电子技术基础》详细习题答案(童诗白,华成英版,高教版)http:《机械设计》课后习题答案(高教版,第八版,西北工业大学)http:《大学物理》完整习题答案http:《管理学》课后答案(周三多)http:机械设计基础(第五版)习题答案[杨可桢等主编]http:程守洙、江之永主编《普通物理学》(第五版)详细解答及辅导http:新视野大学英语课本详解(四册全)http:21世纪大学英语读写教程(第四册)课后答案http:新视野大学英语读写教程3册的课后习题答案http:新视野大学英语第四册答案(第二版)http:《中国近现代史》选择题全集(共含250道题目和答案)http:《电工学》课后习题答案(第六版,上册,秦曾煌主编)http:完整的英文原版曼昆宏观、微观经济学答案http:《数字电子技术基础》习题答案(阎石,第五版)http:《电路》习题答案上(邱关源,第五版)http:《电工学》习题答案(第六版,秦曾煌)http:21世纪大学英语读写教程(第三册)课文翻译http:《生物化学》复习资料大全(3套试卷及答案+各章习题集)http:《模拟电子技术基础》课后习题答案(共10章)http:《概率论与数理统计及其应用》课后答案(浙江大学盛骤谢式千编著)http:《理论力学》课后习题答案(赫桐生,高教版)http:《全新版大学英语综合教程》(第四册)练习答案及课文译文http:《化工原理答案》课后习题答案(高教出版社,王志魁主编,第三版)http:《国际贸易》课后习题答案(海闻P.林德特王新奎)http:大学英语综合教程1-4册练习答案http:《流体力学》习题答案http:《传热学》课后习题答案(第四版)http:高等数学习题答案及提示http:《高分子化学》课后习题答案(第四版,潘祖仁主编)http:马·克思主·义基本原理概论答案http:《计算机网络》课后习题解答(谢希仁,第五版)http:《概率论与数理统计》优秀学习资料http:《离散数学》习题答案(高等教育出版社)http:《模拟电子技术基础简明教程》课后习题答案(杨素行第三版)http:《信号与线性系统分析》习题答案及辅导参考(吴大正版)http:《教育心理学》课后习题答案(皮连生版)http:《理论力学》习题答案(动力学和静力学)http:选修课《中国现当代文学》资料包http:机械设计课程设计——二级斜齿圆柱齿轮减速器(WORD+原图)http:《成本会计》配套习题集参考答案http:《概率论与数理统计》8套习题及习题答案(自学推荐)http:《现代西方经济学(微观经济学)》笔记与课后习题详解(第3版,宋承先)http:《计算机操作系统》习题答案(汤子瀛版,完整版)http:《毛·泽东思想和中国特色社会主·义理论体系概论》有史以来最全面的复习资料!!!http:《线性代数》9套习题+9套相应答案(自学,复习推荐)http:《管理理论与实务》课后题答案(手写版,中央财经大学,赵丽芬)http:统计学原理作业及参考答案http:机械设计课程设计——带式运输机的传动装置的设计http:《物理学》习题分析与解答(马文蔚主编,清·华大学,第五版)http:《新编大学英语》课后答案(第三册)http:《通信原理》课后习题答案及每章总结(樊昌信,国防工业出版社,第五版)http:《c语言程序与设计》习题答案(谭浩强,第三版)http:《微生物学》课后习题答案(周德庆版)http:新视野第二版全四册听说教程答案http:《宏观经济学》课后答案(曼昆,中文版)http:《电力电子技术》习题答案(第四版,王兆安,王俊主编)http:《土力学》习题解答/课后答案http:《公司法》课后练习及参考答案http:《全新版大学英语综合教程》(第二册)练习答案及课文译文http:新视野大学英语视听说第三册答案http:《工程力学》课后习题答案(梅凤翔主编)http:《理论力学》详细习题答案(第六版,哈工大出版社)http:《成本会计》习题及答案(自学推荐,23页)http:《自动控制原理》课后题答案(胡寿松,第四版)http:《复变函数》习题答案(第四版)http:《信号与系统》习题答案(第四版,吴大正)http:《有机化学》课后答案(第二版,高教版,徐寿昌主编)http:《电工学——电子技术》习题答案(下册)http:《财务管理学》章后练习参考答案(人大出版,第四版)http:现代汉语题库(语法部分)及答案http:《概率论与数理统计》习题详解(浙大二、"三版通用)http:《有机化学》习题答案(汪小兰主编)http:《微机原理及应用》习题答案http:《管理运筹学》第二版习题答案(韩伯棠教授)http:《古代汉语》习题集(附习题答案)福建人民出版社http:《金融市场学》课后习题答案(张亦春,郑振龙,第二版)http:《公共关系学》习题及参考答案(复习必备)http:现代汉语通论(邵敬敏版)词汇语法课后练习答案http:《国际经济学》教师手册及课后习题答案(克鲁格曼,第六版)http:《教育技术》课后习题答案参考(北师大)http:《金融市场学》课后答案(郑振龙版)http:《组织行为学》习题集答案(参考下,还是蛮好的)http:《分析化学》课后习题答案(第五版,高教版)http:大学英语精读第3册答案(外教社)http:《国际经济学》习题答案(萨尔瓦多,英文版)http:《复变函数与积分变换》习题答案http:《信息论与编码》辅导PPT及部分习题答案(曹雪虹,张宗橙,北京邮电大学出版社)http:《宏观经济学》习题答案(第七版,多恩布什)http:《物理化学》习题解答(天津大学,第四版,106张)http:新视野大学英语视听说教程第一册http:《机械制造技术》习题集与答案解析http:新视野大学英语听说教程2册听力原文及答案下载http:管理学试题(附答案)http:《材料力学》详细辅导及课后答案(PDF格式,共642页)http:六级词汇注解http:《大学基础物理学》课后答案(共16个单元)http:《管理学——原理与方法》课后习题答案http:新视野2版第三册(大2上学期用)http:曼昆《经济学原理》中文第四版.课后习题答案-清晰图片版http:《数据库系统概论》课后习题(第四版)http:大学数学基础教程课后答案(微积分)http:《投资学》课后习题答案(博迪,第四版)http:流体力学课后答案(高教版,张也影,第二版)http:《语言学概论》习题答案(自考,新版教材)http:《统计学》各章练习题答案http:《数字电子技术基础》课后习题答案(完整答案版)http:《积分变换》习题答案(配套东南大学张元林编的)http:《中级财务会计》习题答案(第二版,刘永泽)http:《计算机网络》课后习题答案(第5版和第4版)http:《单片机原理及应用》课后习题答案(张毅刚主编,高教版)http:《金融工程》课后题答案(郑振龙版)http:《液压传动》第2版思考题和习题解答(共36页)http:《动物学》习题集与答案(资料相当丰富)http:《高频电子线路》习题参考答案(第四版)http:《国际经济法》课后参考答案http:大学英语四级十年真题+听力http:《信号与系统》习题详解(奥本海姆版)http:《电路分析》课后答案及学习指导(第二版,胡翔骏,高教版)http:《C语言设计》(谭浩强,第三版)227页http:新视野大学英语课后习题答案1-4册全集http:《数字电路与逻辑设计》课后习题答案,讲解详细http:《电路》第五版课后答案http:《材料力学》详细习题答案及辅导(第四版,刘鸿文)http:《传播学教程》课后答案(郭庆光主编,完整版)http:《物理化学》习题答案与课件集合(南大)http:《金融市场学》电子书(张亦春,郑振龙,第二版)http:毛邓三95%考点http:高等教育出版社《毛·泽东思想和中国特色社会主·义道路》(09版,原毛邓三)课后题答案http:《线性代数》课后习题答案(陈维新,科学出版社)http:自动控制原理习题集(自学辅导推荐)http:《现代通信原理》习题答案(曹志刚版)http:高等数学上下《习题PPT》http:《数据结构习题集》答案(C版,清·华大学,严蔚敏)http:《大学物理学》习题解答http:《物理化学》习题答案(南大,第五版)http:《机械原理》复习精要与习题精解(第7版,西北大学)http:《宏观经济学》答案(曼昆,第五版,英文版)pdf格式http:《化工热力学》习题与习题答案(含各种版本)http:《材料力学》习题答案http:教育统计与测量管理心理学(自考必备资料,牛逼打印版)http:离散数学习题解答(第四版)清·华大学出版社http:货币银行学http:《技术经济学概论》(第二版)习题答案http:《毛·泽东思想和社会主·义建设理论题概论》精炼考试题目,耐心整理http:《数字信号处理》课后答案及详细辅导(丁美玉,第二版)http:《语言学概论练习题》答案http:《会计电算化》教材习题答案(09年)http:《数据库系统概论》习题答案(第四版)http:《微观经济学》课后答案(平狄克版)http:《控制工程基础》课后习题解答(清·华版)http:《高分子化学》习题答案(第四版)http:《电机与拖动基础》课后习题答案(第四版,机械工业出版社,顾绳谷主编)http:《机械工程测试技术基础》(第三版,熊诗波等主编)课后答案http:《宏观经济学》课后答案(布兰查德版)http:《机械原理》习题答案和超多例题(西北工业大学,第六版)http:《大学物理基础教程》课后习题答案(第二版,等教育出版社)http:简明乐谱基础知识http:《语言学教程》课后答案http:《公司理财》课后答案(英文版,第六版)http:《信息论与编码》学习辅导及习题详解(傅祖芸版)http:《遗传学》课后习题答案(朱军主编,完整版)http:现代人心理实战700题处世韬略http:《自动控制原理》习题答案http:《普通动物学》完整课后答案(刘凌云,郑光美版)http:《微机原理》作业答案(李继灿版)http:尼尔·波兹曼《娱乐至死》http:《电力电子技术》习题答案(第4版,西安交通大学)http:大学英语四级(CET-4)历年真题大全[89-07年39套](精品级)753页wordhttp:《通信原理》习题答案http:《普通化学(第五版)》习题详解(配套浙大编的)http:经济法课后复习及思考答案http:《结构化学基础》习题答案(周公度,北大版)http:财务管理学课后答案荆新王化成http:《C++程序设计》课后习题答案(第2版,吴乃陵,高教版)http:药用植物的两份习题(自己感觉比较有用)http:《数学物理方法》习题解答案详细版(梁昆淼,第二版)http:《机械制图》习题册答案(近机类、非机类,清·华大学出版社)http:《控制工程基础》习题答案(第二版,燕山大学)http:《画法几何》资料包(含习题答案,自学辅导课件)http:《畜禽解剖学与组织胚胎学》习题答案参考http:《统计学》课后习题答案(周恒彤编)http:《西方经济学简明教程》课后习题全解(尹伯成,上海人民出版社)http:《汽车理论》课后答案详细解答(余志生,机械工业出版社)http:《数学物理方法》(第三版)习题答案http:新视野听力原文及课后答案http:新编大学英语4(外研版)课后练习答案http:《材料力学》习题答案(单辉祖,北京航空航天大学)http:大学英语精读第3册课文及课后答案http:《自动控制原理》课后习题答案———胡寿松,第五版http:《数据库系统原理与设计》课后答案(第四版,王珊,萨师煊)http:《数字电子技术基础》详细习题答案(阎石第四版)http:财经应用文笔记http:《管理学》课后习题答案(罗宾斯,人大版,第7版)http:《概率论与数理统计》习题答案(复旦大学出版社)http:《数字信号处理——基于计算机的方法》习题答案(第二版)http:《传热学》课后答案(杨世铭,陶文铨主编,高教版)http:C语言资料大全(有课后答案,自学资料,C程序等)http:毛邓三重点归纳http:《电力拖动自动控制系统》习题答案http:逄锦聚《政治经济学》(第3版)笔记和课后习题详解http:《概率论与数理统计》课后习题解答(东南大学出版社)http:《有机化学》课后习题答案(胡宏纹,第三版)http:《常微分方程》习题解答(王高雄版)http:▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆【因为太多了,没办法再粘贴到这里了,更多答案,直接进入下面这个搜索就好】http:。
大学课本答案大全【大学四年100万份资料大集合】/forum.php?mod=viewthread&tid=7083&fromuid=461166新视野大学英语课后习题答案1-4册全集/forum.php?mod=viewthread&tid=6423&fromuid=461166《毛泽东思想和中国特色社会主义理论体系概论》有史以来最全面的复习资料!!!/forum.php?mod=viewthread&tid=5900&fromuid=461166中国近现代史纲要课后题答案/forum.php?mod=viewthread&tid=5310&fromuid=461166新视野大学英语第四册答案(第二版)/forum.php?mod=viewthread&tid=5161&fromuid=461166新视野大学英语视听说第三册答案/forum.php?mod=viewthread&tid=2647&fromuid=461166《物理化学》习题解答(天津大学, 第四版,106张)/forum.php?mod=viewthread&tid=2531&fromuid=461166新视野大学英语听说教程1听力原文及答案下载/forum.php?mod=viewthread&tid=2006&fromuid=461166西方宏观经济高鸿业第四版课后答案/forum.php?mod=viewthread&tid=1282&fromuid=461166大学英语综合教程1-4册练习答案/forum.php?mod=viewthread&tid=1275&fromuid=461166新视野大学英语课本详解(四册全)/forum.php?mod=viewthread&tid=805&fromuid=461166新视野大学英语读写教程3册的课后习题答案/forum.php?mod=viewthread&tid=514&fromuid=461166毛邓三全部课后思考题答案(高教版)/毛邓三课后答案/forum.php?mod=viewthread&tid=384&fromuid=461166《宏观经济学》资料包集合(PPT讲稿+案例+课后答案)[主用教材:N·格里高利·曼昆的] /forum.php?mod=viewthread&tid=305&fromuid=461166《会计学原理》同步练习题答案/forum.php?mod=viewthread&tid=304&fromuid=461166《管理学》课后答案(周三多)/forum.php?mod=viewthread&tid=301&fromuid=461166《成本会计》习题及答案(自学推荐,23页)/forum.php?mod=viewthread&tid=300&fromuid=461166《成本会计》配套习题集参考答案/forum.php?mod=viewthread&tid=294&fromuid=461166《现代西方经济学(微观经济学)》笔记与课后习题详解(第3版,宋承先)/forum.php?mod=viewthread&tid=290&fromuid=461166《国际贸易》课后习题答案(海闻P.林德特王新奎)/forum.php?mod=viewthread&tid=289&fromuid=461166《西方经济学》习题答案(第三版,高鸿业)可直接打印《微观经济学》课后答案(高鸿业版)/forum.php?mod=viewthread&tid=280&fromuid=461166《管理学》经典笔记(周三多,第二版)/forum.php?mod=viewthread&tid=277&fromuid=461166《教育心理学》课后习题答案(皮连生版)/forum.php?mod=viewthread&tid=268&fromuid=461166《信号与系统》习题答案(第四版,吴大正)/forum.php?mod=viewthread&tid=262&fromuid=461166《计算机操作系统》习题答案(汤子瀛版,完整版)/forum.php?mod=viewthread&tid=260&fromuid=461166高等数学习题答案及提示/forum.php?mod=viewthread&tid=258&fromuid=461166《生物化学》复习资料大全(3套试卷及答案+各章习题集)/forum.php?mod=viewthread&tid=249&fromuid=461166《概率论与数理统计》8套习题及习题答案(自学推荐)/forum.php?mod=viewthread&tid=244&fromuid=461166《线性代数》9套习题+9套相应答案(自学,复习推荐)/forum.php?mod=viewthread&tid=236&fromuid=461166《高分子化学》课后习题答案(第四版,潘祖仁主编)/forum.php?mod=viewthread&tid=232&fromuid=461166《电工学》课后习题答案(第六版,上册,秦曾煌主编)/forum.php?mod=viewthread&tid=217&fromuid=461166《大学物理》完整习题答案/forum.php?mod=viewthread&tid=203&fromuid=461166《通信原理》课后习题答案及每章总结(樊昌信,国防工业出版社,第五版)/forum.php?mod=viewthread&tid=195&fromuid=461166《化工原理答案》课后习题答案(高教出版社,王志魁主编,第三版)/forum.php?mod=viewthread&tid=191&fromuid=461166《工程力学》课后习题答案(梅凤翔主编)/forum.php?mod=viewthread&tid=186&fromuid=461166《中国近代史纲要》课后习题答案/forum.php?mod=viewthread&tid=182&fromuid=461166《概率论与数理统计》优秀学习资料/forum.php?mod=viewthread&tid=181&fromuid=461166《中国近现代史》选择题全集(共含250道题目和答案)/forum.php?mod=viewthread&tid=178&fromuid=461166《概率论与数理统计及其应用》课后答案(浙江大学盛骤谢式千编著)/forum.php?mod=viewthread&tid=174&fromuid=461166《数字信号处理——基于计算机的方法》习题答案(第二版)/forum.php?mod=viewthread&tid=173&fromuid=461166《数据结构习题集》答案(C版,清华大学,严蔚敏)/forum.php?mod=viewthread&tid=172&fromuid=461166《大学物理基础教程》课后习题答案(第二版,等教育出版社)C语言资料大全(有课后答案,自学资料,C程序等)/forum.php?mod=viewthread&tid=168&fromuid=461166《新编大学英语》课后答案(第三册)/forum.php?mod=viewthread&tid=164&fromuid=461166《电力电子技术》习题答案(第四版,王兆安,王俊主编)/forum.php?mod=viewthread&tid=163&fromuid=461166《中级财务会计》习题答案(第二版,刘永泽)/forum.php?mod=viewthread&tid=162&fromuid=461166《常微分方程》习题解答(王高雄版)/forum.php?mod=viewthread&tid=161&fromuid=461166《C++程序设计》课后习题答案(第2版,吴乃陵,高教版)/forum.php?mod=viewthread&tid=158&fromuid=461166《机械制图》习题册答案(近机类、非机类,清华大学出版社)/forum.php?mod=viewthread&tid=143&fromuid=461166《物理化学》习题答案(南大,第五版)/forum.php?mod=viewthread&tid=142&fromuid=461166《高频电子线路》习题参考答案(第四版)/forum.php?mod=viewthread&tid=138&fromuid=461166《宏观经济学》课后答案(曼昆,中文版)/forum.php?mod=viewthread&tid=137&fromuid=461166《电路》习题答案上(邱关源,第五版)/forum.php?mod=viewthread&tid=136&fromuid=461166《信息论与编码》辅导PPT及部分习题答案(曹雪虹,张宗橙,北京邮电大学出版社)/forum.php?mod=viewthread&tid=122&fromuid=461166《分析化学》课后习题答案(第五版,高教版)/forum.php?mod=viewthread&tid=112&fromuid=461166《电工学》习题答案(第六版,秦曾煌)/forum.php?mod=viewthread&tid=102&fromuid=461166《离散数学》习题答案(高等教育出版社)/forum.php?mod=viewthread&tid=96&fromuid=461166《机械设计》课后习题答案(高教版,第八版,西北工业大学)/forum.php?mod=viewthread&tid=90&fromuid=461166《数字电子技术基础》习题答案(阎石,第五版)/forum.php?mod=viewthread&tid=85&fromuid=461166曼昆《经济学原理》课后习题解答/forum.php?mod=viewthread&tid=83&fromuid=461166《流体力学》习题答案/forum.php?mod=viewthread&tid=81&fromuid=461166《中国近代史纲要》完整课后答案(高教版)/forum.php?mod=viewthread&tid=78&fromuid=461166《全新版大学英语综合教程》(第四册)练习答案及课文译文/forum.php?mod=viewthread&tid=77&fromuid=461166《全新版大学英语综合教程》(第三册)练习答案及课文译文《全新版大学英语综合教程》(第二册)练习答案及课文译文/forum.php?mod=viewthread&tid=75&fromuid=461166《全新版大学英语综合教程》(第一册)练习答案及课文译文/forum.php?mod=viewthread&tid=74&fromuid=461166《信号与线性系统分析》习题答案及辅导参考(吴大正版)/forum.php?mod=viewthread&tid=69&fromuid=461166《有机化学》习题答案(汪小兰主编)/forum.php?mod=viewthread&tid=66&fromuid=461166高等数学上下《习题PPT》/forum.php?mod=viewthread&tid=63&fromuid=461166思想道德修养与法律基础课后习题答案/forum.php?mod=viewthread&tid=61&fromuid=461166新编大学英语4(外研版)课后练习答案/forum.php?mod=viewthread&tid=60&fromuid=461166西方经济学(高鸿业版)教材详细答案/forum.php?mod=viewthread&tid=59&fromuid=461166《c语言程序与设计》习题答案(谭浩强,第三版)/forum.php?mod=viewthread&tid=58&fromuid=461166《数字信号处理》课后答案及详细辅导(丁美玉,第二版)/forum.php?mod=viewthread&tid=57&fromuid=461166《概率论与数理统计》习题答案/forum.php?mod=viewthread&tid=55&fromuid=461166《理论力学》课后习题答案/forum.php?mod=viewthread&tid=52&fromuid=461166《自动控制原理》课后题答案(胡寿松,第四版)/forum.php?mod=viewthread&tid=50&fromuid=461166《物理学》习题分析与解答(马文蔚主编,清华大学,第五版)/forum.php?mod=viewthread&tid=48&fromuid=461166《毛泽东思想和中国特色社会主义理论体系概论》习题答案(2008年修订版的)/forum.php?mod=viewthread&tid=47&fromuid=461166完整的英文原版曼昆宏观、微观经济学答案/forum.php?mod=viewthread&tid=46&fromuid=461166离散数学习题解答(第四版)清华大学出版社/forum.php?mod=viewthread&tid=45&fromuid=461166《电机与拖动基础》课后习题答案(第四版,机械工业出版社,顾绳谷主编)/forum.php?mod=viewthread&tid=44&fromuid=461166《现代通信原理》习题答案(曹志刚版)/forum.php?mod=viewthread&tid=43&fromuid=461166《土力学》习题解答/课后答案/forum.php?mod=viewthread&tid=42&fromuid=461166《模拟电子技术基础》详细习题答案(童诗白,华成英版,高教版)/forum.php?mod=viewthread&tid=41&fromuid=461166《模拟电子技术基础简明教程》课后习题答案(杨素行第三版)《数学物理方法》习题解答案详细版(梁昆淼,第二版)/forum.php?mod=viewthread&tid=37&fromuid=461166《马克思主义基本原理概论》新版完整答案/forum.php?mod=viewthread&tid=36&fromuid=461166《单片机原理及应用》课后习题答案(张毅刚主编,高教版)/forum.php?mod=viewthread&tid=35&fromuid=461166机械设计课程设计——二级斜齿圆柱齿轮减速器(WORD+原图)/forum.php?mod=viewthread&tid=34&fromuid=461166《管理运筹学》第二版习题答案(韩伯棠教授)/forum.php?mod=viewthread&tid=31&fromuid=461166《材料力学》详细辅导及课后答案(PDF格式,共642页)/forum.php?mod=viewthread&tid=29&fromuid=461166《统计学》课后答案(第二版,贾俊平版)/forum.php?mod=viewthread&tid=28&fromuid=461166谢希仁《计算机网络教程》(第五版)习题参考答案(共48页)/forum.php?mod=viewthread&tid=25&fromuid=461166《大学基础物理学》课后答案(共16个单元)/forum.php?mod=viewthread&tid=23&fromuid=461166机械设计基础(第五版)习题答案[杨可桢等主编]/forum.php?mod=viewthread&tid=22&fromuid=461166流体力学课后答案(高教版,张也影,第二版)/forum.php?mod=viewthread&tid=21&fromuid=461166《模拟电子技术基础》课后习题答案(共10章)/forum.php?mod=viewthread&tid=20&fromuid=461166《液压传动》第2版思考题和习题解答(共36页)/forum.php?mod=viewthread&tid=18&fromuid=461166高等数学(同济第五版)课后答案(PDF格式,共527页)/forum.php?mod=viewthread&tid=17&fromuid=461166《线性代数》(同济第四版)课后习题答案(完整版)/forum.php?mod=viewthread&tid=16&fromuid=461166《新视野大学英语读写教程(第二版)第三册》课后答案/forum.php?mod=viewthread&tid=15&fromuid=461166《新视野大学英语读写教程(第二版)第二册》课后答案/forum.php?mod=viewthread&tid=14&fromuid=461166新视野大学英语读写教程(第二版)第一册》课后答案/forum.php?mod=viewthread&tid=13&fromuid=461166统计学原理作业及参考答案/forum.php?mod=viewthread&tid=9&fromuid=461166大学英语精读第3册答案(外教社)/forum.php?mod=viewthread&tid=8&fromuid=461166大学数学基础教程课后答案(微积分)/forum.php?mod=viewthread&tid=7&fromuid=461166 21世纪大学英语读写教程(第四册)课后答案21世纪大学英语读写教程(第三册)课文翻译/forum.php?mod=viewthread&tid=5&fromuid=461166 21世纪大学英语读写教程(第三册)参考答案/forum.php?mod=viewthread&tid=4&fromuid=461166 21世纪大学实用英语综合教程(第一册)课后答案及课文翻译/forum.php?mod=viewthread&tid=3&fromuid=461166程守洙、江之永主编《普通物理学》(第五版)详细解答及辅导更多资料可以进入【/?fromuid=461166】下载。
各大学教材课后习题答案网址《线性代数》(同济第四版)课后习题答案(完整版)/viewthread.php?tid=17&fromuid=164 951高等数学(同济第五版)课后答案(PDF格式,共527页)/viewthread.php?tid=18&fromuid=164951中国近现代史纲要课后题答案/viewthread.php?tid=5900&fromuid=164951曼昆《经济学原理》课后习题解答/viewthread.php?tid=85&fromuid=16495121世纪大学英语读写教程(第三册)参考答案/viewthread.php?tid=5&fromuid=164951谢希仁《计算机网络教程》(第五版)习题参考答案(共48页)/viewthread.php?tid=28&fromuid=164951《概率论与数理统计》习题答案/viewthread.php?tid=57&fromuid=164951《模拟电子技术基础》详细习题答案(童诗白,华成英版,高教版)/viewthread.php?tid=42&fromuid=164 951《机械设计》课后习题答案(高教版,第八版,西北工业大学)/viewthread.php?tid=96&fromuid=164951《大学物理》完整习题答案/viewthread.php?tid=217&fromuid=164951《管理学》课后答案(周三多)/viewthread.php?tid=304&fromuid=164951机械设计基础(第五版)习题答案[杨可桢等主编]/viewthread.php?tid=23&fromuid=164951程守洙、江之永主编《普通物理学》(第五版)详细解答及辅导/viewthread.php?tid=3&fromuid=164951新视野大学英语课本详解(四册全)/viewthread.php?tid=1275&fromuid=1 6495121世纪大学英语读写教程(第四册)课后答案新视野大学英语读写教程3册的课后习题答案/viewthread.php?tid=805&fromuid=16 4951新视野大学英语第四册答案(第二版)/viewthread.php?tid=5310&fromuid=1 64951《中国近现代史》选择题全集(共含250道题目和答案)/viewthread.php?tid=181&fromuid=164951《电工学》课后习题答案(第六版,上册,秦曾煌主编)/viewthread.php?tid=232&fromuid=164951完整的英文原版曼昆宏观、微观经济学答案/viewthread.php?tid=47&fromuid=164951《数字电子技术基础》习题答案(阎石,第五版)/viewthread.php?tid=90&fromuid=164951《电路》习题答案上(邱关源,第五版)/viewthread.php?tid=137&fromuid=164951《电工学》习题答案(第六版,秦曾煌)/viewthread.php?tid=112&fromuid=16495121世纪大学英语读写教程(第三册)课文翻译/viewthread.php?tid=6&fromuid=164951《生物化学》复习资料大全(3套试卷及答案+各章习题集)/viewthread.php?tid=258&fromuid=164951《模拟电子技术基础》课后习题答案(共10章)/viewthread.php?tid=21&fromuid=164 951《概率论与数理统计及其应用》课后答案(浙江大学盛骤谢式千编著)/viewthread.php?tid=178&fromuid=164951《理论力学》课后习题答案(赫桐生,高教版)/viewthread.php?tid=119&fromuid=164951《全新版大学英语综合教程》(第四册)练习答案及课文译文/viewthread.php?tid=78&fromuid=164951《化工原理答案》课后习题答案(高教出版社,王志魁主编,第三版)/viewthread.php?tid=195&fromuid=164951《国际贸易》课后习题答案(海闻P.林德特王新奎)大学英语综合教程1-4册练习答案/viewthread.php?tid=1282&fromuid=164951《流体力学》习题答案/viewthread.php?tid=83&fromuid=164951《传热学》课后习题答案(第四版)/viewthread.php?tid=200&fromuid=164951高等数学习题答案及提示/viewthread.php?tid=260&fromuid=16 4951《高分子化学》课后习题答案(第四版,潘祖仁主编)/viewthread.php?tid=236&fromuid=164951马·克思主·义基本原理概论答案/viewthread.php?tid=6417&fromuid=164951《计算机网络》课后习题解答(谢希仁,第五版)/viewthread.php?tid=3434&fromuid=164951《概率论与数理统计》优秀学习资料/viewthread.php?tid=182&fromuid=16 4951《离散数学》习题答案(高等教育出版社)/viewthread.php?tid=102&fromuid=16 4951《模拟电子技术基础简明教程》课后习题答案(杨素行第三版)/viewthread.php?tid=41&fromuid=164 951《信号与线性系统分析》习题答案及辅导参考(吴大正版)/viewthread.php?tid=74&fromuid=164 951《教育心理学》课后习题答案(皮连生版)/viewthread.php?tid=277&fromuid=164951《理论力学》习题答案(动力学和静力学)/viewthread.php?tid=221&fromuid=164951选修课《中国现当代文学》资料包/viewthread.php?tid=273&fromuid=164951机械设计课程设计——二级斜齿圆柱齿轮减速器(WORD+原图)/viewthread.php?tid=35&fromuid=164951《成本会计》配套习题集参考答案/viewthread.php?tid=300&fromuid=164951《概率论与数理统计》8套习题及习题答案(自学推荐)/viewthread.php?tid=249&fromuid=164951《现代西方经济学(微观经济学)》笔记与课后习题详解(第3版,宋承先)/viewthread.php?tid=294&fromuid=164951《计算机操作系统》习题答案(汤子瀛版,完整版)/viewthread.php?tid=262&fromuid=164951《毛·泽东思想和中国特色社会主·义理论体系概论》有史以来最全面的复习资料!!!/viewthread.php?tid=6423&fromuid=164951《线性代数》9套习题+9套相应答案(自学,复习推荐)/viewthread.php?tid=244&fromuid=164951《管理理论与实务》课后题答案(手写版,中央财经大学,赵丽芬)/viewthread.php?tid=287&fromuid=164951统计学原理作业及参考答案/viewthread.php?tid=13&fromuid=164951机械设计课程设计——带式运输机的传动装置的设计/viewthread.php?tid=222&fromuid=164951《物理学》习题分析与解答(马文蔚主编,清·华大学,第五版)/viewthread.php?tid=50&fromuid=164 951《新编大学英语》课后答案(第三册)/viewthread.php?tid=168&fromuid=164951《通信原理》课后习题答案及每章总结(樊昌信,国防工业出版社,第五版)/viewthread.php?tid=203&fromuid=16 4951《c语言程序与设计》习题答案(谭浩强,第三版)/viewthread.php?tid=59&fromuid=164951《微生物学》课后习题答案(周德庆版)/viewthread.php?tid=291&fromuid=164951新视野第二版全四册听说教程答案/viewthread.php?tid=6959&fromuid=164951《宏观经济学》课后答案(曼昆,中文版)/viewthread.php?tid=138&fromuid=164951《电力电子技术》习题答案(第四版,王兆安,王俊主编)/viewthread.php?tid=164&fromuid=164951《土力学》习题解答/课后答案/viewthread.php?tid=43&fromuid=164951《公司法》课后练习及参考答案/viewthread.php?tid=307&fromuid=164951《全新版大学英语综合教程》(第二册)练习答案及课文译文/viewthread.php?tid=76&fromuid=164951新视野大学英语视听说第三册答案/viewthread.php?tid=5161&fromuid=164951《工程力学》课后习题答案(梅凤翔主编)/viewthread.php?tid=191&fromuid=164951《理论力学》详细习题答案(第六版,哈工大出版社)/viewthread.php?tid=2445&fromuid=164951《成本会计》习题及答案(自学推荐,23页)/viewthread.php?tid=301&fromuid=164951《自动控制原理》课后题答案(胡寿松,第四版)/viewthread.php?tid=52&fromuid=164951《复变函数》习题答案(第四版)/viewthread.php?tid=118&fromuid=16 4951《信号与系统》习题答案(第四版,吴大正)/viewthread.php?tid=268&fromuid=16 4951《有机化学》课后答案(第二版,高教版,徐寿昌主编)/viewthread.php?tid=3830&fromuid=164951《电工学——电子技术》习题答案(下册)/viewthread.php?tid=237&fromuid=164951《财务管理学》章后练习参考答案(人大出版,第四版)/viewthread.php?tid=292&fromuid=164951现代汉语题库(语法部分)及答案/viewthread.php?tid=211&fromuid=164951《概率论与数理统计》习题详解(浙大二、三版通用)/viewthread.php?tid=80&fromuid=164951《有机化学》习题答案(汪小兰主编)/viewthread.php?tid=69&fromuid=164951《微机原理及应用》习题答案/viewthread.php?tid=261&fromuid=164951《管理运筹学》第二版习题答案(韩伯棠教授)/viewthread.php?tid=34&fromuid=164951《古代汉语》习题集(附习题答案)福建人民出版社/viewthread.php?tid=1277&fromuid=164951《金融市场学》课后习题答案(张亦春,郑振龙,第二版)/viewthread.php?tid=279&fromuid=164951《公共关系学》习题及参考答案(复习必备)/viewthread.php?tid=308&fromuid=164951现代汉语通论(邵敬敏版)词汇语法课后练习答案/viewthread.php?tid=1429&fromuid=164951《国际经济学》教师手册及课后习题答案(克鲁格曼,第六版)/viewthread.php?tid=281&fromuid=164951《教育技术》课后习题答案参考(北师大)/viewthread.php?tid=199&fromuid=164951《金融市场学》课后答案(郑振龙版)/viewthread.php?tid=24&fromuid=164951《组织行为学》习题集答案(参考下,还是蛮好的)/viewthread.php?tid=297&fromuid=164951《分析化学》课后习题答案(第五版,高教版)/viewthread.php?tid=122&fromuid=164951大学英语精读第3册答案(外教社)/viewthread.php?tid=9&fromuid=164951《国际经济学》习题答案(萨尔瓦多,英文版)/viewthread.php?tid=155&fromuid=164951《复变函数与积分变换》习题答案/viewthread.php?tid=70&fromuid=164951《信息论与编码》辅导PPT及部分习题答案(曹雪虹,张宗橙,北京邮电大学出版社)/viewthread.php?tid=136&fromuid=164951《宏观经济学》习题答案(第七版,多恩布什)/viewthread.php?tid=293&fromuid=164951《物理化学》习题解答(天津大学, 第四版,106张)/viewthread.php?tid=2647&fromuid=164951新视野大学英语视听说教程第一册/viewthread.php?tid=5901&fromuid=164951《机械制造技术》习题集与答案解析/viewthread.php?tid=219&fromuid=164951新视野大学英语听说教程2册听力原文及答案下载/viewthread.php?tid=2532&fromuid=1 64951管理学试题(附答案)/viewthread.php?tid=1087&fromuid=164951《材料力学》详细辅导及课后答案(PDF格式,共642页)/viewthread.php?tid=31&fromuid=164951六级词汇注解/viewthread.php?tid=4893&fromuid=1 64951《大学基础物理学》课后答案(共16个单元)/viewthread.php?tid=25&fromuid=164951《管理学——原理与方法》课后习题答案/viewthread.php?tid=303&fromuid=164951新视野2版第三册(大2上学期用)/viewthread.php?tid=1438&fromuid=1 64951曼昆《经济学原理》中文第四版.课后习题答案-清晰图片版/viewthread.php?tid=1131&fromuid=164951《数据库系统概论》课后习题(第四版)/viewthread.php?tid=240&fromuid=164951大学数学基础教程课后答案(微积分)/viewthread.php?tid=8&fromuid=164951《投资学》课后习题答案(博迪,第四版)/viewthread.php?tid=284&fromuid=164951流体力学课后答案(高教版,张也影,第二版)/viewthread.php?tid=22&fromuid=164951《语言学概论》习题答案(自考,新版教材)/viewthread.php?tid=313&fromuid=164951《统计学》各章练习题答案/viewthread.php?tid=458&fromuid=16 4951《数字电子技术基础》课后习题答案(完整答案版)/viewthread.php?tid=197&fromuid=16 4951《积分变换》习题答案(配套东南大学张元林编的)/viewthread.php?tid=103&fromuid=16 4951《中级财务会计》习题答案(第二版,刘永泽)/viewthread.php?tid=163&fromuid=164951《计算机网络》课后习题答案(第5版和第4版)/viewthread.php?tid=132&fromuid=164951《单片机原理及应用》课后习题答案(张毅刚主编,高教版)/viewthread.php?tid=36&fromuid=164 951《金融工程》课后题答案(郑振龙版)/viewthread.php?tid=288&fromuid=164951《液压传动》第2版思考题和习题解答(共36页)/viewthread.php?tid=20&fromuid=164951《动物学》习题集与答案(资料相当丰富)/viewthread.php?tid=315&fromuid=164951《高频电子线路》习题参考答案(第四版)/viewthread.php?tid=142&fromuid=16 4951《国际经济法》课后参考答案/viewthread.php?tid=306&fromuid=164951大学英语四级十年真题+听力/viewthread.php?tid=2454&fromuid=164951《信号与系统》习题详解(奥本海姆版)/viewthread.php?tid=79&fromuid=164 951《电路分析》课后答案及学习指导(第二版,胡翔骏,高教版)/viewthread.php?tid=177&fromuid=16 4951《C语言设计》(谭浩强,第三版)227页/viewthread.php?tid=129&fromuid=164951新视野大学英语课后习题答案1-4册全集/viewthread.php?tid=7083&fromuid=1 64951《数字电路与逻辑设计》课后习题答案,讲解详细/viewthread.php?tid=233&fromuid=16 4951《电路》第五版课后答案/viewthread.php?tid=1678&fromuid=1 64951《材料力学》详细习题答案及辅导(第四版,刘鸿文)/viewthread.php?tid=88&fromuid=164951《传播学教程》课后答案(郭庆光主编,完整版)/viewthread.php?tid=252&fromuid=164951《物理化学》习题答案与课件集合(南大)/viewthread.php?tid=205&fromuid=164951《金融市场学》电子书(张亦春,郑振龙,第二版)/viewthread.php?tid=278&fromuid=164951毛邓三95%考点/viewthread.php?tid=6802&fromuid=164951高等教育出版社《毛·泽东思想和中国特色社会主·义道路》(09版,原毛邓三)课后题答案/viewthread.php?tid=6874&fromuid=164951《线性代数》课后习题答案(陈维新,科学出版社)/viewthread.php?tid=156&fromuid=164951自动控制原理习题集(自学辅导推荐)/viewthread.php?tid=53&fromuid=164951《现代通信原理》习题答案(曹志刚版)/viewthread.php?tid=44&fromuid=164 951高等数学上下《习题PPT》/viewthread.php?tid=66&fromuid=164 951《数据结构习题集》答案(C版,清·华大学,严蔚敏)/viewthread.php?tid=173&fromuid=164951《大学物理学》习题解答/viewthread.php?tid=114&fromuid=164951《物理化学》习题答案(南大,第五版)/viewthread.php?tid=143&fromuid=164951《机械原理》复习精要与习题精解(第7版,西北大学)/viewthread.php?tid=179&fromuid=164951《宏观经济学》答案(曼昆,第五版,英文版)pdf格式/viewthread.php?tid=134&fromuid=164951《化工热力学》习题与习题答案(含各种版本)/viewthread.php?tid=235&fromuid=164951《材料力学》习题答案/viewthread.php?tid=230&fromuid=164951教育统计与测量管理心理学(自考必备资料,牛逼打印版)/viewthread.php?tid=264&fromuid=164951离散数学习题解答(第四版)清·华大学出版社/viewthread.php?tid=46&fromuid=164951货币银行学/viewthread.php?tid=5074&fromuid=164951《技术经济学概论》(第二版)习题答案/viewthread.php?tid=109&fromuid=164951《毛·泽东思想和社会主·义建设理论题概论》精炼考试题目,耐心整理《数字信号处理》课后答案及详细辅导(丁美玉,第二版)/viewthread.php?tid=58&fromuid=164951《语言学概论练习题》答案/viewthread.php?tid=312&fromuid=164951《会计电算化》教材习题答案(09年)/viewthread.php?tid=296&fromuid=164951《数据库系统概论》习题答案(第四版)/viewthread.php?tid=86&fromuid=164951《微观经济学》课后答案(平狄克版)/viewthread.php?tid=254&fromuid=164951《控制工程基础》课后习题解答(清·华版)/viewthread.php?tid=127&fromuid=164951《高分子化学》习题答案(第四版)/viewthread.php?tid=144&fromuid=164951《电机与拖动基础》课后习题答案(第四版,机械工业出版社,顾绳谷主编)/viewthread.php?tid=45&fromuid=164951《机械工程测试技术基础》(第三版,熊诗波等主编)课后答案/viewthread.php?tid=27&fromuid=164951《宏观经济学》课后答案(布兰查德版)/viewthread.php?tid=286&fromuid=164951《机械原理》习题答案和超多例题(西北工业大学,第六版)/viewthread.php?tid=239&fromuid=164951《大学物理基础教程》课后习题答案(第二版,等教育出版社)/viewthread.php?tid=172&fromuid=164951简明乐谱基础知识/viewthread.php?tid=762&fromuid=164951《语言学教程》课后答案/viewthread.php?tid=309&fromuid=164951《公司理财》课后答案(英文版,第六版)/viewthread.php?tid=282&fromuid=164951《信息论与编码》学习辅导及习题详解(傅祖芸版)/viewthread.php?tid=238&fromuid=164951《遗传学》课后习题答案(朱军主编,完整版)/viewthread.php?tid=317&fromuid=164951现代人心理实战700题处世韬略/viewthread.php?tid=770&fromuid=164951《自动控制原理》习题答案/viewthread.php?tid=117&fromuid=164951《普通动物学》完整课后答案(刘凌云,郑光美版)/viewthread.php?tid=316&fromuid=164951《微机原理》作业答案(李继灿版)/viewthread.php?tid=218&fromuid=164951尼尔·波兹曼《娱乐至死》《电力电子技术》习题答案(第4版,西安交通大学)/viewthread.php?tid=130&fromuid=164951大学英语四级(CET-4)历年真题大全[89-07年39套](精品级)753页word/viewthread.php?tid=809&fromuid=164951《通信原理》习题答案/viewthread.php?tid=190&fromuid=16 4951《普通化学(第五版)》习题详解(配套浙大编的)/viewthread.php?tid=94&fromuid=164951经济法课后复习及思考答案/viewthread.php?tid=5406&fromuid=164951《结构化学基础》习题答案(周公度,北大版)/viewthread.php?tid=212&fromuid=164951财务管理学课后答案荆新王化成/viewthread.php?tid=5414&fromuid=164951《C++程序设计》课后习题答案(第2版,吴乃陵,高教版)/viewthread.php?tid=161&fromuid=164951药用植物的两份习题(自己感觉比较有用)/viewthread.php?tid=270&fromuid=164951《数学物理方法》习题解答案详细版(梁昆淼,第二版)/viewthread.php?tid=38&fromuid=164951《机械制图》习题册答案(近机类、非机类,清·华大学出版社)/viewthread.php?tid=158&fromuid=164951《控制工程基础》习题答案(第二版,燕山大学)/viewthread.php?tid=126&fromuid=164951《画法几何》资料包(含习题答案,自学辅导课件)/viewthread.php?tid=216&fromuid=16 4951《畜禽解剖学与组织胚胎学》习题答案参考/viewthread.php?tid=314&fromuid=164951《统计学》课后习题答案(周恒彤编)/viewthread.php?tid=3022&fromuid=164951《西方经济学简明教程》课后习题全解(尹伯成,上海人民出版社)/viewthread.php?tid=2569&fromuid=164951《汽车理论》课后答案详细解答(余志生,机械工业出版社)/viewthread.php?tid=123&fromuid=164951《数学物理方法》(第三版)习题答案新视野听力原文及课后答案/viewthread.php?tid=1401&fromuid=164951新编大学英语4(外研版)课后练习答案/viewthread.php?tid=61&fromuid=164951《材料力学》习题答案(单辉祖,北京航空航天大学)/viewthread.php?tid=187&fromuid=164951大学英语精读第3册课文及课后答案/viewthread.php?tid=1640&fromuid=164951《自动控制原理》课后习题答案———胡寿松,第五版/viewthread.php?tid=1740&fromuid=164951《数据库系统原理与设计》课后答案(第四版,王珊,萨师煊)/viewthread.php?tid=150&fromuid=164951《数字电子技术基础》详细习题答案(阎石第四版)/viewthread.php?tid=167&fromuid=16 4951财经应用文笔记/viewthread.php?tid=1088&fromuid=164951《管理学》课后习题答案(罗宾斯,人大版,第7版)/viewthread.php?tid=302&fromuid=164951《概率论与数理统计》习题答案(复旦大学出版社)/viewthread.php?tid=82&fromuid=164951《数字信号处理——基于计算机的方法》习题答案(第二版)/viewthread.php?tid=174&fromuid=16 4951《传热学》课后答案(杨世铭,陶文铨主编,高教版)/viewthread.php?tid=33&fromuid=164951C语言资料大全(有课后答案,自学资料,C程序等)/viewthread.php?tid=170&fromuid=164951毛邓三重点归纳/viewthread.php?tid=6816&fromuid=164951《电力拖动自动控制系统》习题答案/viewthread.php?tid=115&fromuid=164951逄锦聚《政治经济学》(第3版)笔记和课后习题详解/viewthread.php?tid=2185&fromuid=164951《概率论与数理统计》课后习题解答(东南大学出版社)/viewthread.php?tid=206&fromuid=164951《有机化学》课后习题答案(胡宏纹,第三版)《常微分方程》习题解答(王高雄版)/viewthread.php?tid=162&fromuid=164951▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆▆【因为太多了,没办法再粘贴到这里了,更多答案,直接进入下面这个搜索就好】/?fromuid=164951。
D o n e (略)2−1分别用几何法和解析法求图示四个力的合力。
已知力F 3水平,F 1=60N ,F 2=80N ,F 3=50N ,F 4=100N 。
解: (一) 几何法用力比例尺,按F 3、F 4、F 1、F 2的顺序首尾相连地画出各力矢得到力多边形abcde ,连接封闭边ae 既得合力矢F R ,如图b 所示。
从图上用比例尺量得合力F R 的大小F R =68.8N ,用量角器量得合力F R 与x 轴的夹角θ=88°28′,其位置如图b 所示。
(二) 解析法以汇交点为坐标原点,建立直角坐标系xOy ,如图c 所示。
首先计算合力在坐标轴上的投影N79.68511002180103605121103N85.152100502180101605221101421R 4321R =⨯-⨯+⨯=-+==-=⨯-+⨯+⨯-=-++-==∑∑F F F F F F F F F F F y y x x然后求出合力的大小为N 81.6879.68)85.1(222R 2R R =+-=+=y x F F F设合力F R 与x 轴所夹锐角为θ,则82881838.3785.179.68tan R R '︒====θθxy F F再由F R x 和F R y 的正负号判断出合力F R 应指向左上方,如图c 所示。
习题2−1图 F 1 F 2 F 4 F 3 F R 88°28′ (b) 231 1 1 1 F 1 F 2F 3 F 4 F Rθ (c) 23 1 1 1 1 F 1 F 2 F 3 F 4(a) 0 25 50kN e a b c d O y xD o n e (略) 2−2一个固定的环受到三根绳子拉力F T1 、F T2 、F T3的作用,其中F T1,F T2的方向如图,且F T1=6kN ,F T2=8kN ,今欲使F T1 、F T2 、F T3的合力方向铅垂向下,大小等于15kN ,试确定拉力F T3的大小和方向。
工程力学第四版课后习题答案工程力学第四版课后习题答案工程力学是一门研究物体静力学和动力学的学科,是工程学的基础课程之一。
通过学习工程力学,可以帮助我们理解和解决各种工程问题。
而课后习题则是巩固和应用所学知识的重要方式。
本文将为读者提供工程力学第四版课后习题的答案,希望能够帮助大家更好地掌握这门学科。
第一章:力的基本概念1. 一个物体的质量是5kg,重力加速度为9.8m/s²,求其重力。
答案:重力 = 质量× 重力加速度= 5kg × 9.8m/s² = 49N2. 一个力的大小为20N,方向与x轴夹角为30°,求其在x轴上的分力。
答案:在x轴上的分力 = 力的大小× cos(夹角) = 20N × cos(30°) ≈ 17.32N第二章:力的作用效果1. 一个物体受到两个力的作用,一个力的大小为10N,方向与x轴正向夹角为30°;另一个力的大小为15N,方向与x轴正向夹角为60°。
求物体所受合力的大小和方向。
答案:合力的x分力= 10N × cos(30°) + 15N × cos(60°) ≈ 17.32N合力的y分力= 10N × sin(30°) + 15N × sin(60°) ≈ 23.09N合力的大小= √(合力的x分力² + 合力的y分力²) ≈ 28.35N合力的方向 = arctan(合力的y分力 / 合力的x分力) ≈ 53.13°第三章:力的分解与合成1. 一个力的大小为30N,方向与x轴夹角为45°,求其在x轴和y轴上的分力。
答案:在x轴上的分力 = 力的大小× cos(夹角) = 30N × cos(45°) ≈ 21.21N在y轴上的分力 = 力的大小× sin(夹角) = 30N × sin(45°) ≈ 21.21N2. 一个物体受到两个力的作用,一个力的大小为20N,方向与x轴正向夹角为60°;另一个力的大小为15N,方向与x轴正向夹角为45°。
工程力学(天津大学)第3章答案习 题3-1 如图(a )所示,已知F 1=150N ,F 2=200N ,F 3=300N ,N 200='=F F 。
求力系向O 点简化的结果,并求力系合力的大小及其与原点O 的距离d 。
解:(1)将力系向O 点简化N6.43752300101200211505210121321R-=---=---=∑='F F F F F x xN6.16151300103200211505110321321R-=+--=+--=∑='F F F F F y y()()NF F F y x 5.4666.1616.437222R 2R R =-+-='+'='1O1'FF 1200mmF 3FF 2yx1 100mm80mm 31 2(a习题3(b (cM OF ´Rθ x yOd F RxyO设主矢与x 轴所夹锐角为θ,则有61206.4376.161arctan arctanR R'︒=--=''=x y F F θ因为0R <'xF ,0R <'yF ,所以主矢F 'R 在第三象限。
将力系向O 点简化的结果如图(b )。
(2)因为主矢和主矩都不为零,所以此力系可以简化为一个合力如图(c ),合力的大小mm 96.4504596.05.46644.21N 5.466RR R ====='=m F M d F F o3-2重力坝的横截面形状如图(a )所示。
为了计算的方便,取坝的长度(垂直于图面)l =1m 。
已知混凝土的密度为2.4×103 kg/m 3,水的密度为1×103 kg/m 3,试求坝体的重力W 1,W 2和水压力P 的合力F R ,并计算F R 的作用线与x 轴交点的坐标x 。
mN 44.2108.02002.0513001.02115008.02.0511.021)(31⋅=⨯-⨯+⨯=⨯-⨯+⨯==∑F F F M M O O F3-3如图(a )所示,4个力和一个力偶组成一平面任意力系。
工程力学(天津大学)第4章答案4-1 如图所示,铅垂轴上固结一水平圆盘,圆盘半径为R ,OB =h 。
在圆盘的边缘上C 、D 两点分别作用力F 1和F 2,F 2平行于yBz 面,ED 平行于y 轴,α、β均为已知。
试分别写出力F 1及F 2对各坐标轴之矩。
解:)cos cos sin (cos sin cos )(2222βαβαββ-=⨯+⨯-=R F R F h F M x Fαβαβsin sin sin sin )(222R F R F M y =⨯=F αβαβsin cos sin cos )(222R F R F M z =⨯=F4-2 匀质矩形平板重G =20kN ,用过其重心铅垂线上D 点的三根绳索悬在水平位置。
设DO =60cm ,AB =60cm ,BE =80cm ,C 点为EF 的中心。
求各绳所受的拉力。
E xyFF AB h OC αβ习题zD 0)(0)()(1111==-=F F F z y x M M hF M解:取矩形平板为研究对象,其上受一汇交于D 点的空间汇交力系作用,连接DH 、DI 、DJ ,如图b 所示。
列平衡方程习题((由(1)(2)(3)式联立解得4-3图示空间构架由三根无重直杆组成,在D 端用球铰链连接,A 、B 和C 端则用球铰链固定在水平地面上。
如果挂在D 端的物重P =10kN ,试求铰链A 、B 和C 的约束力。
kN02.12kN 51.6===C B A F F F ()()()302052106061106061106000205210406110406110400,01,,0,0=-++=-++==-+=-+==∴===-=∑∑∑C B A C B A zC B A C B AxBA B A yF F FG DC DO F DB DO F DA DO F FF F F DO COF BD BJ F AD AI F FF F BD AD BH AH BD BHF AD AH F F解:取空间构架及物体为研究对象,受力如图(b )所示。
建立坐标系如图,列平衡方程0cos 45cos 450(1)0sin 45cos30sin 45cos30cos150(2)0sin 45sin 30sin 45sin 30sin150(3)x A B yA B C zA B C FF F F F F F FF F FG =-︒+︒==-︒⨯︒-︒⨯︒-︒==-︒⨯︒-︒⨯︒-︒-=∑∑∑由(1)、(2)、(3)式联立解得4-4 挂物架如图所示,不计重量的三杆用球铰链连接于O ,平面BOC 是水平面,且OB =OC ,角度如图。
若在 O 点挂一重物G ,重为1000N ,求三杆所受的力。
习题OGCBA45°45°45°yOGCBA45°45°45°FF FF xz((26.39kN 33.46kNA B C F F F ==-=解:取挂物架及物体为研究对象,受力如图(b )所示。
建立坐标系如图,列平衡方程4-5 一力F 沿正立方体的对角线BK 作用,方向如图示。
设F =200N ,正立方体边长为2m ,求力F 对O 点之矩矢的大小及方向。
0cos 4502210001414N 0sin 45cos 450707Nsin 45cos 450707NzA A xB A B yC A C FF F F F F F F F F F F F =-︒-==-==-=--︒⨯︒===+︒⨯︒==∑∑∑解:力F 在三个坐标轴上的投影为,力F 对三个坐标轴的矩为()2()2()033()20()333200m33()0()2333200230.95N mx z y y x z z y x M yF zF F F M zF xF F FM xF yF F F F=-=⨯-⨯==-=-⨯===⋅=-=⨯-===-⋅F F F 22cos 4523322sin 45233233x y z F FF F FF F F=︒==-︒==-=4-6 轴AB 与铅直线成α角,悬臂CD 垂直地固定在轴上,其长为a ,并与铅直面zAB 成θ角,如图所示。
如在点D 作用铅直向下的力P ,22222()()()()230.95(230.95)326.60N mo x y z M M M M =++=+-=⋅F F F F cos(,)0,230.95cos(,)0.707,326.60230.95cos(,)0.707326.60xo o y o oz o o M M M M M M =====-===-M i M j M k求此力对轴AB 的矩。
解:力P 对轴AB 的矩为4-7 图示三圆盘A 、B 和C 的半径分别为150mm 、100mm 和50mm 。
三轴OA 、OB 和OC 在同一平面内,AOB ∠为直角,在这三圆盘上分别作用力偶,组成各力偶的力作用在轮缘上,θαθαsin sin sin sin Pa aP M AB =⨯⨯=习题A它们的大小分别等于10N 、20N 和F 。
如这三圆盘所构成的物系处于平衡,不计物系重量,求能使此物系平衡的力F 的大小和角α。
解:此力系为空间力偶系,列平衡方程由(1)、(2)式联立解得4-8 截面为工字形的立柱受力如图示,试求此力向截面形心C 平移的结果。
习题101502502cos(90)0(1)0201002502sin(90)0(2)xy M F M F αα=-⨯⨯+⨯⨯-︒==-⨯⨯+⨯⨯-︒=∑∑143.1350NF α=︒=解:将力F 向截面形心C 平移的结果为一个力F'和一个力偶M C4-9 力系中F 1=100N ,F 2=300N ,F 3=200N 。
各力作用线的位置如图所示,试将力系向原点O 简化。
习题()0.125(100)0012.5kN m ()00(0.05)(100)5kN m ()(0.05)00.12500()()()12.55kN mx z y y x z z y x c x y z M yF zF M zF xF M xF yF M M M =-=⨯--⨯=-⋅=-=⨯--⨯-=-⋅=-=-⨯-⨯==++=--⋅F F F M F F F i j 0,100kN100kNx y z F F F ===-'=-F k解:将力系向原点O 简化得N59.10512001005100100N 61.24913330013100300N29.3545220013230051002001310020031232=-=-=='=⨯==='-=-⨯-=--=='∑∑∑F F F F F F F F F F F z Rzy Ryx RxmN 59.1033.0522002.01333003.051002002.013100300)(m N 64.361.01323002.01001.0131002002.0)(mN 78.513.0512001.01333003.051001001.013100300)(322132⋅=⨯+⨯⨯=⨯+⨯==⋅=⨯-⨯-=⨯-⨯-==⋅-=⨯-⨯⨯-=⨯-⨯-==∑∑∑F F M M F F M M F F M M z z y y x x F F F4-10 在图示起重机中,AB= BC= AD = AE;点A、B、D和E等均为球铰链连接,如三角形ABC的投影为AF线,AF与y轴夹角为 ,如图。
求铅垂支柱和各斜杆的内力。
习题Cxy zA F4α F F C AF C BC xyz DEA F 49αF α B((C xyz DEA F 49α α B F BEF BD F BAF'(解:取C 铰及重物为研究对象,受力如图(b )所示。
建立坐标系如图,列平衡方程取B 铰为研究对象,受力如图(c )所示。
且F'CB =F CB ,列平衡方程cos 4502cos 450sin 45cos cos 02sin 45(2)2zCA CA xCA CB CB CA F F F FF FFF F F F F F αα=-︒-==-=-︒=-︒-==-︒=--=∑∑由(1)、(2)式联立解得4-11 水平轴上装有两个带轮C 和D ,轮的半径r 1=20cm ,r 2=25cm ,轮C 的胶带是水平的,其拉力F 2 = 2F 1=5000N ,轮D 的胶带与铅垂线成角30=α,其拉力F 3 = 2F 4;不计轮轴的重量。
求在平衡情况下拉力F 3 和F 4的大小及轴承约束力。
(cos sin )(cos sin )BD BE F F F F αααα=-=+0sin 45sin 45sin 45sin 45sin 0(1)0sin 45cos 45sin 45cos 45cos 0(2)(3)xBD BE CByBD BE CBCB CB F F F F FF F F F F F αα='︒⨯︒-︒⨯︒+=='-︒⨯︒-︒⨯︒+='==∑∑0cos 45cos 45cos 02Fcos zBD BE BA BA FF F F F αα=-︒-︒-==-∑解:取水平轴及两个带轮为研究对象,受力如图(b )所示。
列平衡方程N40002N200025.02.025000220,0)(4321142424111124231211===⨯===-+-=-+-=∑F F r r F F r F r F r F r F r F r F r F r F MyFN412525.0250035.130sin 2000305.035.130sin 3205.0)()15.0(sin )()5.015.0(0)(142143-=⨯⨯-⨯︒⨯⨯-==⨯-⨯︒-⨯-=+-+⨯+-++-=∑Bx Bx Bx zF F F F F F F F F MαFN389725.130cos 2000305.130cos 320)15.0(cos )()5.015.0(0)(443=⨯︒⨯⨯==⨯︒-⨯=+⨯+-++=∑Bz Bz Bz xF F F F F F MαF习(N129930cos 20003389730cos 3030cos 30cos )(04443=︒⨯⨯+-=︒+-==︒-+=+-+=∑F F F F F F F F F F FBz Az Bz Az Bz Az zαN637530sin 2000325003)4125(30sin 33030sin 330sin )(041414321-=︒⨯⨯-⨯---=︒---==︒+++=+++++=∑F F F F F F F F F F F F F F FBx Ax Bx Ax Bx Ax xα4-12 水平轴上装有两个凸轮,一个凸轮上作用已知力F 1=800N ,另一个凸轮上作用未知力F ,如图所示。