弹性力学第九章
- 格式:ppt
- 大小:1.07 MB
- 文档页数:81

第九章 弹性体振动的准确解9.1 引言在引论中我们曾经提到,实际的振动系统都是弹性体系统。
弹性体具有分布的物理参数(质量,阻尼,刚度)。
它可以看做由无数个质点借弹性联系组成的连续系统,其中每个质点都具有独立的自由度。
所以,一个弹性体的空间位置需要用无数个点的独立空间坐标来确定。
也就是说,弹性体具有无限多个自由度。
在数学上,弹性体的运动需要用偏微分方程来描述。
前面我们论述的多自由度系统只是弹性体的近似力学模型。
本章讨论理想弹性体的振动,所谓理想弹性体.....是指满足以下三个条件的连续系统模型:(1)匀质分布;(2)各向同性;(3)服从虎克定律。
通过对一些简单形状的弹性体的振动分析,着重说明弹性体振动的特点,弄清它与多自由度系统振动的共同点与不同点。
我们将看到,任何一个弹性体具有无限多个固有频率以及无限多个与之相应的主振型;而且这些主振型之间也存在着关于质量与刚度的正交性;弹性体的自由振动也可以表示为各个主振动的线性叠加;而且对于弹性体的动响应分析,主振型叠加法仍然是适用的。
所以说,弹性体振动与多自由度系统的振动,二者有着一系列共同的特性,这就是它们的共性。
而二者的差别仅在于数量上弹性体有无限多个固有频率与主振型,而多自由度系统只有有限多个。
我们还将看到,对于一些简单情形下的弹性体振动问题,可以很方便地找到它们的准确解。
尽管实际问题往往是复杂的,很少可以归结为这些简单情形;但是了解这些简单情形下准确解的特征,对于处理复杂问题是有帮助的。
为了避免用到弹性力学的知识,而仅以材料力学作为基础,我们将限于讨论一维弹性体(梁,轴,杆等)。
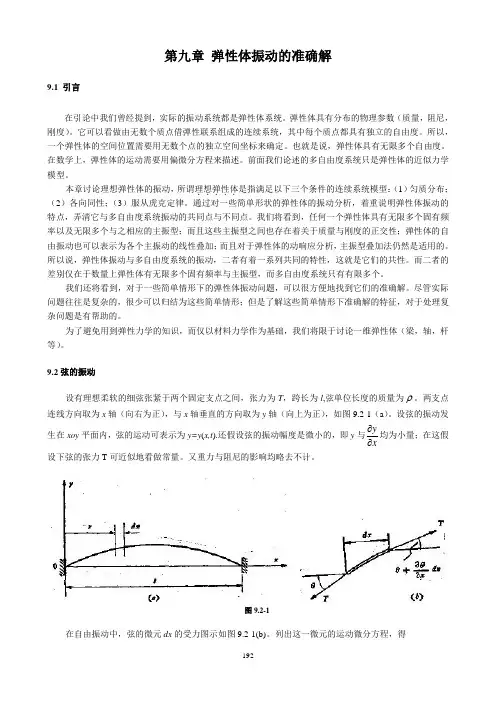
9.2弦的振动设有理想柔软的细弦张紧于两个固定支点之间,张力为T ,跨长为l ,弦单位长度的质量为ρ。
两支点连线方向取为x 轴(向右为正),与x 轴垂直的方向取为y 轴(向上为正),如图9.2-1(a )。
设弦的振动发生在xoy 平面内,弦的运动可表示为y=y (x,t ).还假设弦的振动幅度是微小的,即 y 与xy∂∂均为小量;在这假设下弦的张力T 可近似地看做常量。
《弹性力学简明教程》习题提示和参考答案第二章习题的提示与答案2-1 是2-2 是2-3 按习题2-1分析。
2-4 按习题2-2分析。
2-5 在的条件中,将出现2、3阶微量。
当略去3阶微量后,得出的切应力互等定理完全相同。
2-6 同上题。
在平面问题中,考虑到3阶微量的精度时,所得出的平衡微分方程都相同。
其区别只是在3阶微量〔即更高阶微量〕上,可以略去不计。
2-7 应用的基本假定是:平衡微分方程和几何方程─连续性和小变形,物理方程─理想弹性体。
2-8 在大边界上,应分别列出两个精确的边界条件;在小边界〔即次要边界〕上,按照圣维南原理可列出3个积分的近似边界条件来代替。
2-9 在小边界OA边上,对于图2-15〔a〕、〔b〕问题的三个积分边界条件相同,因此,这两个问题为静力等效。
2-10 参见本章小结。
2-11 参见本章小结。
2-12 参见本章小结。
2-13 注意按应力求解时,在单连体中应力分量必须满足〔1〕平衡微分方程,〔2〕相容方程,〔3〕应力边界条件〔假设>。
2-14 见教科书。
2-15 见教科书。
2-16 见教科书。
2-17 取它们均满足平衡微分方程,相容方程与x=0和的应力边界条件,因此,它们是该问题的正确解答。
2-18 见教科书。
2-19 提示:求出任一点的位移分量和,与转动量,再令,便可得出。
第三章习题的提示与答案3-1 本题属于逆解法,已经给出了应力函数,可按逆解法步骤求解:〔1〕校核相容条件是否满足,〔2〕求应力,〔3〕推求出每一边上的面力从而得出这个应力函数所能解决的问题。
3-2 用逆解法求解。
由于本题中l>>h,x=0,l属于次要边界〔小边界〕,可将小边界上的面力化为主矢量和主矩表示。
3-3 见3-1例题。
3-4 本题也属于逆解法的问题。
首先校核是否满足相容方程。
再由求出应力后,并求对应的面力。
本题的应力解答如习题3-10所示。
应力对应的面力是:主要边界:所以在边界上无剪切面力作用。
第二章平面问题的基本理(1) 两类平面问题的特点?(几何、受力、应力、应变等)。
(2) 试列出两类平面问题的基本方程,并比较它们的异同。
(3) 在建立平面问题基本方程(平衡方程、几何方程)时,作了哪些近似简化处理?其作用是什么?(4) 位移分量与应变分量的关系如何?是否有位移就有应变?(5) 已知位移分量可唯一确定其形变分量,反过来是否也能唯一确定?需要什么条件?(6) 已知一点的应力分量,如何求任意斜截面的应力、主应力、主方向?(7) 什么是线应变(正应变)、剪应变(切应变、角应变)?如何由一点应变分量求任意方向的线应变、主应变、主应变方向?(8) 平面应力与平面应变问题的物理方程有何关系?(9) 边界条件有哪两类?如何列写?第四章平面问题的极坐标解(1 )极坐标解答适用的问题结构的几何形状(?圆环、圆筒、圆弧形曲杆、楔形体、半无限平面体等)(2) 极坐标下弹性力学平面问题的基本方程?平衡微分方程、几何方程、物理方程、边界条件方程)(3) 极坐标下弹性力学平面问题的相容方程?用应变表示的、用应力函数表示的相容方程等)(4) 极坐标下应力分量与应力函数间关(5) 极坐标下弹性力学平面问题边界条件的列写?(6) 极坐标下轴对称问题应力函数、应力分量、位移分量的特点?(7) 圆弧形曲梁问题应力函数、应力分量、位移分量的确定?(如何利用材料力学中曲梁横截面应力推出应力函数的形式?)(8) 楔形体在力偶、集中力、边界分布力作用下,应力函数、应力分量、位移分量的确定?(10) 何为圣维南原理?其要点是什么?圣维南原理的作用是什么?如何利用圣维南原理列写边界条件?(11) 弹性力学问题为超静定问题,试说明之。
(12) 弹性力学问题按位移求解的基本方程有哪些?(13) 弹性力学平面问题的变形协调方程有哪些形式?各自的使用条件是什么?(14) 按应力求解弹性力学问题,为什么除了满足平衡方程、边界条件外,还必须满足变形协调方程(相容方程)?而按位移求解为什么不需要满足变形协调方程?(15 )应力分量满足平衡方程、相容方程、边界条件,是否就是问题的正确解?为什么?(16) 常体力情况下,如何将体力转化为面力?其意义如何?(17) 何为逆解法?何为半逆解法?(18) Airy应力函数在边界上值的物理意义是什么?应力函数的导数:_________ 在边界上值的物理意义是什么?x ' y (9 )半无限平面体在边界上作用力偶、集中力、分布力下,应力函数、应力分量、位移分量的确定?(10) 圆孔附近应力集中问题应力函数、应力分量、位移分量的确(11) 定加法的应用。