刚体平面运动微分方程
- 格式:ppt
- 大小:198.50 KB
- 文档页数:3
刚体平面运动微分方程
一般来说,物体运动过程中都受到各种力的作用,此外,如果是连续体,由于运动而产生的声学变化也都会影响运动状态,因此就需要研究物体运动中力和声学变化之间的关系。
在力学分析中,相对论块集体动力学(Classical Dynamics)是最基本的物理系统,它描述了物体运动的微分方程,从而可以求出物体的运动状态。
平面运动动力学是指物体运动过程中的动力学分析,可以用来描述物体在平面上的运动状态,包括具体的位置、速度、加速度等。
可以使用牛顿第二定律将机械力和物体加速度联系起来,写成机械力和物体加速度的微分方程,它的形式为:
F=m·a,
其中F表示机械力,m表示物体的质量,a表示物体的加速度。
物体在平面上的运动还会受到一些拖拽力的影响,比如阻力和空气阻力等,如果将拖拽力也考虑在内,则可以将上述方程修正为:
其中b表示拖拽力,v表示物体运动状态时的速度。
此外,如果物体处于受到旋转力作用的情况下,则可以将其表述为:
F=m·a+b·v+c·(ω×r),
其中c表示旋转抗力,ω表示旋转角速度,r表示物体圆心到物体某一点的距离。
由此可以得到物体平面运动的微分方程:
其中Δp表示物体加速度变化,F表示物体受到机械及其拖拽力和旋转抗力的作用。
从而可以根据上述微分方程,求出物体在平面上运动过程中的状态和性质,从而又可以了解物体在机械及其拖拽力和旋转抗力作用下,在平面上的运行状态。
平面力系1. 平面汇交力系可简化为以合力,其大小和方向等于各分力的矢量和,合力的作用线通过汇交点。
2. 平面汇交力系平衡的充要条件为合力等于零,与任意力系不同,任意力系由于不能汇交,会产生力偶,必须得满足主矢主矩都等于零才平衡。
3. 平面汇交力系可以通过解析法,即将各力分解到直角坐标系上,再求合力。
4. 力对点取矩:是一个代数量,绝对值等于力的大小与力臂的乘积:Fd F Mo =)(5. 合力矩定理:平面力系的合力对于平面内任一点的矩等于所有分力对该点的矩的代数和。
6. 力偶、力偶矩:力偶由两个大小相等,方向相反,作用线不在同一直线上的平行力组成。
力偶矩等于平行力的大小乘上平行力的间距,逆时针为正,顺时针为负。
7. 力偶的等效定理:在同一平面内,只要力偶矩的大小和转向不变,力偶的作用效果就不变。
8. 平面力系的简化:平面任意力系向一点的简化结果为一合力和一合力偶,合力称为主矢,合力偶为主矩。
主矢作用线过简化中心。
9. 平面任意力系平衡的充要条件:⎩⎨⎧==00'Mo F R ,其平衡方程为∑=0x F ,∑=0y F ,∑=0)(Fi Mo ,是三个独立的方程,可以求解三个未知数。
10. 静定问题:当系统中的未知量数目等于独立平衡方程的数目,则所有未知数都能解出,这种问题称为静定问题。
反之为非静定问题。
空间力系11. 空间汇交力系的合力等于各分力的矢量和,合力的作用线过汇交点。
可得合力的大小和方向余弦:()()()222∑∑∑++Fz Fy Fx R F ,()R R F Fx i F ∑=,cos ,其余类似。
12. 空间汇交力系平衡的充要条件为该力系的合力为零,或所有分力在三个坐标轴上投影的代数和为零,∑∑∑===0,0,0Fz Fy Fx ,可求三个未知数。
13. 力对点的矩矢等于该力作用点的矢径与该力的矢量积:()F r F M ⨯=o ;若k Fz j Fy i Fx F k z j y i x r ++=++=,,由行列式可得,()()()()k yFx xFy j xFz zFx i zFy yFz F Mo -+-+-=,在坐标轴上的投影为()[]yFz zFy F Mo x -=,()[]xFz zFx F Mo y -=,()[]yFx xFy F Mo z -=。
动量矩定理12-1 质量为m 的点在平面Oxy 内运动,其运动方程为: x a cos t y bsin2 t 式中a 、b 和 为常量。
求质点对原点 O 的动量矩。
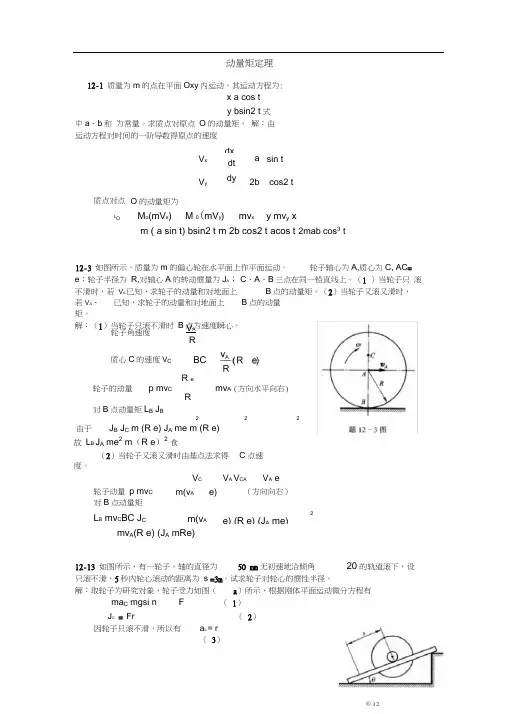
解:由运动方程对时间的一阶导数得原点的速度V xdxsin t dt aV y dy 2b cos2 t 质点对点 O 的动量矩为L O M o (mV x ) M 0(mV y )mv x y mv y x m ( a sin t) bsin2 t m 2b cos2 t acos t 2mab cos 3 t 12-3 如图所示,质量为m 的偏心轮在水平面上作平面运动。
轮子轴心为A,质心为C, AC = e ;轮子半径为 R,对轴心A 的转动惯量为J A ; C 、A 、B 三点在同一铅直线上。
(1 )当轮子只 滚不滑时,若 V A 已知,求轮子的动量和对地面上 B 点的动量矩。
(2)当轮子又滚又滑时, 若V A 、 已知,求轮子的动量和对地面上 B 点的动量矩。
解:(1)当轮子只滚不滑时 B 点为速度瞬心。
轮子角速度V A R质心C 的速度V CBCR e轮子的动量p mv Cmv A (方向水平向右)R对B 点动量矩L B J B2 2 2由于 J B J C m (R e) J A me m (R e) 故 L B J A me 2 m (R e )2食 (2)当轮子又滚又滑时由基点法求得 C 点速度。
V C V A V CA V A e 轮子动量 p mv C m(v A e) (方向向右) 对B 点动量矩L B mv C BC J Cm(v A 2e) (R e) (J A me) mv A (R e) (J A mRe) 12-13 如图所示,有一轮子,轴的直径为 50 mm 无初速地沿倾角 20的轨道滚下,设 只滚不滑,5秒内轮心滚动的距离为 s =3m 。
试求轮子对轮心的惯性半径。
解:取轮子为研究对象,轮子受力如图( a )所示,根据刚体平面运动微分方程有 ma C mgsi n F ( 1) J C = Fr ( 2)因轮子只滚不滑,所以有 a c = r ( 3) ® 12将式(3)代入式(1)、(2)消去F 得到mr sinm?g上式对时间两次积分,并注意到 t = 0时 0, 0,则 mgrt 2 sin mgrt 2s in 2(J C mr 2) 2(m 2 mr 2) 把 r = 0.025 m 及 t = 5 s 时,s 'grt 2sin f gt 2sin-r r「s r 1grt 2sin 2( 2 r 2) r 3 m 代入上式得0.0259.8 52si n202 30.09 m 90 mm12-17 图示均质杆 AB 长为I ,放在铅直平面内,杆的一端 A 靠在光滑铅直墙上,另一端 B 放在光滑的水平地板上,并与水平面成 °角。

6 刚体平面运动微分方程刚体的平面运动可简化成刚体的平面图形S 在某一固定平面内的运动,用3个独立坐标描述。
作用在刚体上的外力可简化为S 平面内的一平面力系F i (=1, 2,…,n )。
设坐标系Oxy 为固定的惯性参考系,Cx ′ y ′为质心平移坐标系,如图8-6所示。
平面图形的运动可用质心坐标x C , y C 和绕质心的转动角ϕ描述。
刚体的绝对运动可分解成跟随质心的平移和相对质心平移坐标系的转动。
由动量定理所述,刚体跟随质心的平移仅与外力系的主矢有关,由质点系相对质心的动量矩定理可知,刚体相对质心平移坐标系的运动仅与外力系对质心的主矩有关。
于是,由式(8.1.11)可写出y C x C F ym F x m R R ,==&&&& (8.1.55) 式中m 为刚体的质量,F R x , F R y 分别是外力系的主矢在y x ,方向上的分量。
由式(8.1.54)在垂直于平面图形S 方向上的投影,可得Cz CzM tL =d d (8.1.56) 其中M Cz 是外力系对通过质心且垂直于平面图形S 的轴之矩的代数和。
而ϕ&C Cz J L =,J C 是刚体对于通过质心且垂直于平面图形S 的轴的转动惯量。
应用质心运动定理和相对质心的动量矩定理,得到了三个动力学方程,给出了三个广义坐标x C , y C 和ϕ的封闭方程组,用以解决刚体的平面运动问题。
动力学方程组m (8.1.57)Cz C ni iy C n i ix C M J F ym F x ===∑∑==ϕ&&&&&&,,11称为刚体平面运动微分方程组。
给出相应的初始条件,例如,t =0时,刚体质心的位置分别为x C 0和y C 0,质心在初始时的速度分别为和,平面图形S 在初始时的角位移和角速度分别为ϕ0C x &0C y&0和0ϕ&。
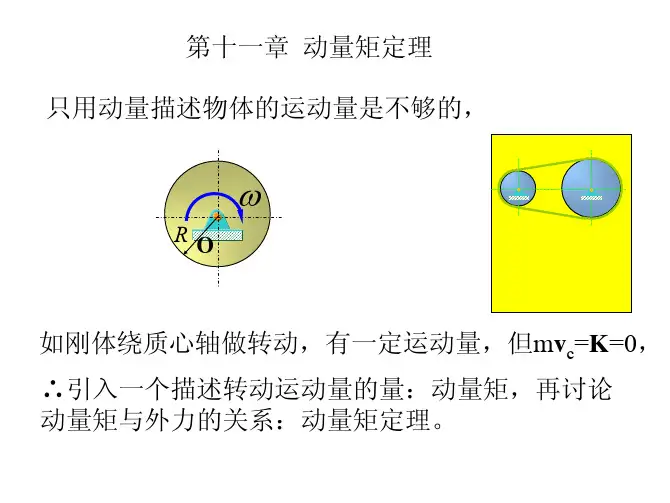
第十二章 动量矩定理第一、二节 质点和质点系的动量矩 动量矩定理教学时数:2学时教学目标:1、 对动量矩的概念有清晰的理解2、 熟练的计算质点系的动量矩教学重点:质点系的动量矩 质点系的动量矩定理教学难点:质点系的动量矩定理 教学方法:板书+PowerPoint教学步骤: 一、引言由静力学力系简化理论知:平面任意力系向任一简化中心简化可得一力和一力偶,此力等于平面力系的主矢,此力偶等于平面力系对简化中心的主矩。
由刚体平面运动理论知:刚体的平面运动可以分解为随同基点的平动和相对基点的转动。
若将简化中心和基点取在质心上,则动量定理(质心运动定理)描述了刚体随同质心的运动的变化和外力系主矢的关系。
它揭示了物体机械运动规律的一个侧面。
刚体相对质心的转动的运动变化与外力系对质心的主矩的关系将有本章的动量矩定理给出。
它揭示了物体机械运动规律的另一个侧面。
二、质点和质点系的动量矩 1、质点的动量矩设质点M 某瞬时的动量为v m ,质点相对固定点O 的矢径为r,如图。
质点M 的动量对于点O 的矩,定义为质点对于点O 的动量矩,即()v m r v m M L O O ⨯==()v m M O垂直于△OMA ,大小等于△OMA 面积的二倍,方向由右手法则确定。
类似于力对点之矩和力对轴之矩的关系,质点对固定坐标轴的动量矩等于质点对坐标原点的动量矩在相应坐标轴上的投影,即 ()d mv v m M L xy Z z ==质点对固定轴的动量矩是代数量,其正负号可由右手法则来确定。
动量矩是瞬时量。
在国际单位制中,动量矩的单位是s m kg /2⋅ 2、质点系的动量矩(1)质点系对固定点的动量矩设质点系由n 个质点组成,其中第i 个质点的质量为i m ,速度为i v ,到O 点的矢径为i r,则质点系对O 点的动量矩(动量系对点的主矩)为:()∑∑⨯==i i i i i O O v m r v m M L即:质点系对任一固定点O 的动量矩定义为质点系中各质点对固定点动量矩的矢量和。