• 在该机构中,齿轮3是齿轮2的对称部分,为虚约束
• 计算时应将齿轮3及其引入的约束去掉来计算
• 同理,将齿轮2当作虚约束去掉,完全一样 • 目的:为了改善构件的受力情况 动画
2 1 5 4 3
F=3n-2PL-PH =3 3-2 2 -2
=3
50
51
机械设计基础 —— 平面连杆机构
4、两构件上联接点的轨迹重合
6
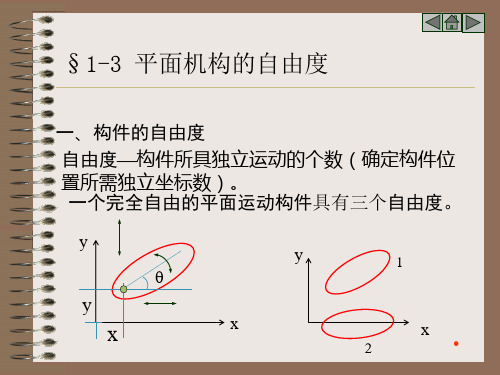
低副:转动副、移动副(面接触) 低自由度
限制沿X,Y轴运动,只能绕O轴 转动.2个约束,一个自由度.
y
限制沿Y轴移动和O轴转动,只能 沿X轴移动,2个约束,一个自由度.
y x
o
x
o7Biblioteka 移动副 转动副21
2 1
8
高副:齿轮副、凸轮副(点、线接触)
保留2个自由度,带进1个约束.
高自由度
n
n
t
t
t
n
B C B
C
D
D
A
E
A
C
B A E
F =3n-2pl-ph = 3 2-2 3-0=0
F =3n-2pl-ph = 3 3-2 5-0= -1
F =3n-2pl-ph = 3 4-2 5-0= 2
F=0,刚性桁架,构件之间无相对运动 原动件数小于F,各构件无确定的相对运动 原动件数大于F,在机构的薄弱处遭到破坏
57
例4:平炉渣口堵赛机构 F=3n-2PL-PH
=3 6 - 2 8 -1
=1
7
7 1 2
6 5
3
4
58
例5:锯木机机构 F=3n-2PL-PH
9 9 7
8
5
4 3 6 2 9 1