连续系统的最优控制
- 格式:doc
- 大小:1.06 MB
- 文档页数:17

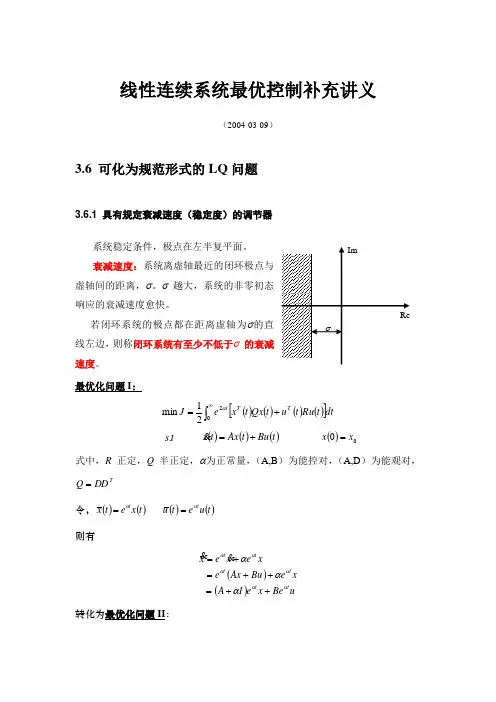
线性连续系统最优控制补充讲义(2004-03-09)3.6 可化为规范形式的LQ 问题3.6.1 具有规定衰减速度(稳定度)的调节器系统稳定条件,极点在左半复平面。
衰减速度:系统离虚轴最近的闭环极点与虚轴间的距离,σ。
σ 越大,系统的非零初态响应的衰减速度愈快。
若闭环系统的极点都在距离虚轴为σ的直线左边,则称闭环系统有至少不低于σ 的衰减速度。
最优化问题I :()()()()[]⎰∞+=0221min dt t Ru t u t Qx t x e J TT t α t s . ()()()t Bu t Ax t x+=& ()00x x = 式中,R 正定,Q 半正定,α为正常量,(A,B )为能控对,(A,D )为能观对,T DD Q =令,()()t x e t x t α= ()()t u e t u t α= 则有()()uBe x e I A x e Bu Ax e x e x e x t t t t t t ααααααααα++=++=+=&& 转化为最优化问题II :()()()()[]⎰∞+=021min dt t u R t u t x Q t x J T Tut s .()()()000x x x u B x I A x==++=α& 可以证明:[A,B ]完全能控[]B I A ,α+⇒完全能控。
[A,D ]完全能观[]D I A ,α+⇒完全能观。
则,最优化问题II 有唯一解:()()t x K t u α-=其中ααP B R K T 1-=()()01=+-+++-Q P B BR P P I A I A P TT αααααα又由于()()t x K t x e K u e u t t αααα-=-==--所以,两个最优控制问题的反馈增益阵是相同的,又由于最优控制问题II的闭环系统 ()x BK I A xαα-+=& 渐近稳定,即 ()()0lim lim ==∞→∞→t x e t x t t t α所以,()t x 也是渐近稳定的,且其衰减速度不低于t e α-。
最优控制基本原理
最优控制基本原理是控制理论中的一个重要分支,它主要研究如何设计最优控制器以实现系统的最优性能。
最优控制的基本原理包括动态规划、变分法和最优化理论等。
动态规划是一种通过将问题分解成子问题并递归地解决这些子问题来求解最优控制问题的方法。
它通过构建最优化问题的状态转移方程和边界条件来寻找最优控制策略。
变分法则是一种数学方法,它通过将最优控制问题转化为弱形式的变分问题来寻找最优控制策略。
变分法运用泛函分析中的概念和方法,可以得到对动力学过程进行最优控制的必要条件。
最优化理论是一种通过最小化或最大化目标函数来寻找最优控制策略的方法,它主要应用于连续系统和非线性系统的最优控制问题中。
最优化理论的方法包括拉格朗日乘数法、Kuhn-Tucker条件和梯度下降法等。
最优控制基本原理在实际应用中有着广泛的应用,例如控制机器人、导弹、航天器和工业过程等。
通过研究最优控制基本原理,可以提高控制系统的性能,提高工业过程的效率,优化资源利用等。
- 1 -。

(完整)最优控制理论考试重点编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)最优控制理论考试重点)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)最优控制理论考试重点的全部内容。
1.最优控制问题的性能指标(1)积分型性能指标(拉格朗日型):⎰=ft t dt t t u t x L u J 0]),(),([)(反映控制过程偏差在某种意义下的平均或控制过程的快速性,同时能反映燃料或能量的消耗。
(2)末值型性能指标(梅耶型):]),([)(f f t t x u J φ=,接近目标集程度,即末态控制精度的度量. (3)综合性能指标(鲍尔扎型):⎰+=ft t f f dt t t u t x L t t x u J 0]),(),([]),([)(φ.2.最优控制问题的数学模型给定系统的状态方程:]),(),([)(t t u t x f t x =•;状态方程的边界条件:⎩⎨⎧∈===St x t t x t x t t f f )(,)(,000;给定性能指标:⎰+=f tt f f dt t t u t x L t t x u J 0]),(),([]),([)(φ;允许控制域u (t ):U t u ∈)(。
3.最优控制应用的几种类型:最短时间控制,最小能量控制,线性调节器,最少燃料消耗控制,线性跟踪器。
4.选取性能指标注意:应能反映对系统的主要技术条件要求,便于对最优控制进行求解,所导出最优控制易于实现。
5.边界条件:指状态向量在起点或终点的所有容许值的集合。
6.横截条件:依据性能指标的要求,从容许值的集合中选择哪一点作为始态或终态的问题。

最优控制理论本词条由“科普中国”百科科学词条编写与应用工作项目提供专业内容并参与编辑最优控制理论(optimal control theory),是现代控制理论的一个主要分支,着重于研究使控制系统的性能指标实现最优化的基本条件和综合方法。
最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科。
它是现代控制理论的重要组成部分。
1简介这方面的开创性工作主要是由贝尔曼(R.E.Bellman)提出的动态规划和庞特里亚金等人提出的最大值原理。
这方面的先期工作应该追溯到维纳(N.Wiener)等人奠基的控制论(Cybernetics)。
1948年维纳发表了题为《控制论—关于动物和机器中控制与通讯的科学》的论文,第一次科学的提出了信息、反馈和控制的概念,为最优控制理论的诞生和发展奠定了基础。
2研究内容最优控制理论所研究的问题可以概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。
这类问题广泛存在于技术领域或社会问题中。
例如,确定一个最优控制方式使空间飞行器由一个轨道转换到另一轨道过程中燃料消耗最少,选择一个温度的调节规律和相应的原料配比使化工反应过程的产量最多,制定一项最合理的人口政策使人口发展过程中老化指数、抚养指数和劳动力指数等为最优等,都是一些典型的最优控制问题。
最优控制理论是50年代中期在空间技术的推动下开始形成和发展起来的。
苏联学者Л.С.庞特里亚金1958年提出的极大值原理和美国学者R.贝尔曼1956年提出的动态规划,对最优控制理论的形成和发展起了重要的作用。
线性系统在二次型性能指标下的最优控制问题则是R.E.卡尔曼在60年代初提出和解决的。
3主要方法为了解决最优控制问题,必须建立描述受控运动过程的运动方程,给出控制变量的允许取值范围,指定运动过程的初始状态和目标状态,并且规定一个评价运动过程品质优劣的性能指标。
第四十一章最优控制和自适应控制及其智能控制第一节最优控制[!、"]一、基于变分法的最优控制问题求解最优控制是经典控制理论发展到现代控制理论的重要标志之一。
这里“最优”一词指的是相对于某一给定性能指标最优,如使控制过程的时间最短,燃料消耗最少,或者误差最小,而不是任何性能指标下都是最优的。
给定受控系统的状态方程!"##(",$,%)寻求不受约束的控制向量$,使系统从初始状态"(%$)#"$在时间间隔[%$,%%]内转移到"(%%)且满足等式约束&["(%%),%%]#$这里&为’维向量函数;并使指标&取极值(#)["(%%),%%]’!%%%$*(",$,%)(%利用变分法求解最优控制时,首先构造哈密尔顿函数+和增广泛函(,。
+#*(",$,%)’!)#(",$,%)#+(",$,!,%)(,#)["(%%),%%]’")&["(%%),%%]’!%%%$[+(",$,!,%)*!)!"](%式中,"为-维、.为’维拉格郎日乘子向量。
由变分#(,#$导出的极值必要条件为:伴随方程!!#*"+"!状态方程!"##(",$,%)#"+"!控制方程"+"$#$终端约束&["(%%),%%]#$横截条件!(%%)#")""(%%)’"&)""(%%).用计算机联立求解上面五个方程,可得到最优控制问题的数值解。
二、极小值原理与动态规划用变分法求解最优控制问题时,均假定控制!不受约束,并且存在惟一的偏导数!"#!!。
然而任何实际的控制量均限制在允许范围内变化,即!"!或!!$!#%&,$"#,…,’有些问题中!"#!!不存在,在这些情况下,可利用极小值原理求解。
第6章 连续系统的最优控制6.1 最优化问题6.2 最优控制的变分法求解6.3 线性系统二次型性能指标的最优控制1、线性系统有限时间最优状态调节系统 ◆二次型性能指标设受控系统对平衡点的增量方程为()()()()()x t A t x t B t u t ∆=∆+∆,00()x t x ∆=∆简记为()()()()()x t A t x t B t u t =+,00()x t x =最优状态调节是指:对上述系统,在时间区间0[,]f t t t ∈,寻求最优状态反馈控制,使初始状态偏差00()x t x =迅速衰减,且同时使二次型性能泛函11()()[()()()()]d 22ft t t tf f f x u t J x t Q x t x t Q x t u t Q u t t =++⎰*min f x u J J J J J =++→=式中 ()0f n n Q ⨯≥——终端加权矩阵。
()0x n n Q ⨯≥——状态加权矩阵。
()0u r r Q ⨯>——控制加权矩阵。
三个加权矩阵均为对称矩阵,为简单,一般取为对角矩阵。
●1()()2tf f f f J x t Q x t =表示对终端状态偏差即稳态控制精度的限制。
当1diag[]f f fn Q q q =,211()2n f fi i f i J q x t ==∑●01()()d 2ft tx xt J x t Q x t t =⎰表示对控制过程中状态偏差衰减速度的要求。
当1diag[]x x xn Q q q =,0211()d 2ft nx xi i i t J q x t t ==∑⎰●01()()d 2ft tu u t J u t Q u t t =⎰表示对控制过程中所消耗的能量的限制,以避免状态偏差过快衰减导致控制量超过允许数值。
当1diag[]u u ur Q q q =,0211()d 2ft ru ui i i t J q u t t ==∑⎰,2()i u t 可理解为功率。
实际上,在性能指标中,x J 已经对控制的稳态精度有所要求。
当对稳态精度有更高的要求时,才增加f J 项。
由上可知,上述二次型性能指标的物理意义是,在整个时间区间0[,]f t t t ∈,特别是终值时刻f t t =上状态变量尽量接近于0而又不消耗过大的控制能量。
◆f t 有限时的最优状态控制最优状态调节器问题是始端固定、终端自由的泛函极值问题,即0t 给定,00)x t x =(,f t 给定, )f t x (自由的泛函极值问题。
黎卡提(Riccati )矩阵微分方程(一阶非线性矩阵微分方程):1()()()()()()()()()ttux P t P t A t A t P t P t B t Q B t P t Q -++-+=0其终值条件为()f f P t Q =可以证明,当矩阵(),(),(),()u x A t B t Q t Q t 的各元素在0[,]f t t 上都是t 的连续函数时,黎卡提方程在0[,]f t t 上满足终值条件的解存在且唯一。
当()P t 解出后,便有最优控制为*1()()()()()()tuu t K t x t Q B t P t x t -==-式中,1()()()tuK t Q B t P t -=-为时变状态反馈矩阵。
最优性能指标为*0001()()()2tJ x t P t x t =闭环系统结构如图:⊗x◆()P t 的特征*()P t 的时变性:即使,,,u x A B Q Q 都是定常矩阵,此时黎卡提方程为定常系数矩阵微分方程,()P t 也是时变的。
*()P t 的对称性()P t 是对称矩阵,共含有(1)/2n n +个不同的元素。
*()P t 0[,]f t t t ∈的非负定性由于,,f u x Q Q Q 均为非负定矩阵,所以对任意的()u t 和相应的()x t ,总有0J ≥,*1()()()02tJ x t P t x t =≥,因()x t 是任意的,可知()0P t ≥。
*当f t t <<=∞,()P t 为常数矩阵在这种情况下,在动态过程的大多数时间内,()P t 为常数矩阵,从而最优控制的时变状态反馈简化为定常状态反馈。
说明后列。
例:系统状态方程为x x u =-+,0(0)x x =求最优控制,使1022211()()d min 22f J x t x u t =++→⎰解:1A =-,1B =,1f Q =,1x Q =,1u Q =,00t =,10f t = 矩阵黎卡提微分方程为2()()2()10P t P t P t -++=,()(10)1f f P t P Q ===对1f Q =,10f t =,解得))(21)1)(2()(2(2t t eP t e----+-++-=+--最优控制为*1()()()()()()tuu t Q B t P t x t P t x t -=-=-数值计算表明:(0)(1)(6)0.4140P P P ====,(7)0.4141P =,(8)0.4157P =(9)0.4430P =,(9.5)0.5372P =,(10)1f P Q ==1f Q =和0f Q =时的()P t 曲线如图所示。
t2、f t →∞时的线性定常系统最优状态调节器f t 有限时的最优状态调节器,由于()P t 是时变的。
若f t →∞,()P t 将趋于常数矩阵,最优状态反馈矩阵也将随之转化为常数矩阵。
◆无限时间(f t →∞)状态调节器问题 若线性定常系统x Ax Bu =+,00()x t x =能控,u 不受限制,二次型性能泛函为1[]d 2t tx u t J x Q x u Q u t ∞=+⎰式中 ()0x n n Q ⨯≥——状态加权对称常矩阵;()0u r r Q ⨯>——控制加权对称常矩阵。
当0x Q >或0x Q ≥但{,}A H 能观(其中tx H H Q =),则最优状态反馈控制存在且唯一:*1()()()tuu t Kx t Q B Px t -==-式中 1()tn n uK Q B P -⨯=-为最优定常状态反馈矩阵()n n P ⨯是满足满足下列黎卡提矩阵代数方程的正定对称常数矩阵:1ttux PA A P PBQ B P Q -+-+=0最优轨线*()x t 是下列奇次状态方程的解:()x A BK x =+ , 00()x t x =性能泛函的最小值为*001()()2tJ x t Px t =说明:*表面上u 不受限制,但由于性能泛函中含有1()()d 2tu t u t Q u t t ∞⎰,通过u Q 的选择,可把i u 控制在允许范围内。
* f t →∞最优调节闭环系统是定常系统。
结构图为⊗x*由于f t →∞,要求线性定常系统能控,否则不可控模态将使()x ∞→∞。
*无限时间最优调节系统必是大范围渐近稳定的。
证明:由前知,0P >.故标量函数()0tV x x Px =>。
而()[()]()tttt V x x Px x Px A BK x Px x P A BK x =+=+++11()()tt t ttuux A BQ B P Px x P A BQ B P x --=-+-11()tut tutA P PBQB P x PB x A Q P P B --=-+- 1()ttux x PBQ B Q P x -=+-由于0x Q >,0u Q >,故()0V x <。
此外,当x →∞,()V x →∞。
根据李亚普诺夫稳定性定理,无限时间最优调节系统是大范围渐近稳定的。
*无限时间最优调节系统是渐近稳定的,当f t →∞,*()0f e x t x ==。
故在性能泛函中,终端泛函1()()2tf f f x t Q x t 失去意义,予以取消,或认为f Q =0。
例:简化的同步发电机—无穷大系统机电模型如图。
模型数据为:10s M =,0.5T =,377rad/s N ω=。
二次型性能泛函权矩阵diag[0.251]x Q =,1u Q =。
求最优状态控制。
解:系统状态方程x Ax Bu =+为0/01/N u T MM ωδδωω∆⎡⎤∆⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-∆∆⎣⎦⎣⎦⎣⎦⎣⎦ 对于所给数据37700.0500.1u δδωω∆⎡⎤∆⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-∆∆⎣⎦⎣⎦⎣⎦⎣⎦ 展开黎卡提方程1ttux PA A P PBQ B P Q -+-+=0得1112111212221222037700.050.0503770p p p p p p p p -⎡⎤⎡⎤⎡⎤⎡⎤+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦1112111212221222000.2500000.010100p p p p p p p p ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤-+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ 由于111212221222[00.1]0.1[]tp p B P p p p p ⎡⎤==⨯⎢⎥⎣⎦,因此,只需求出12p 和22p 。
将黎卡提方程展开,有212p +1012p -25=0,2220.01p +75422p +1=0解得12 2.071,12.07p =-;22p =满足0P >的解为12 2.071p =,22395.3p ==最优状态反馈矩阵为11222[]0.1[][0.207139.53]tuK k k Q B P p p δω-==-=-⨯=--闭环系统结构无控制时,特征方程和特征值分别为37700.05s sI A s--==,1,2j4.342rad/s λ=±系统临界稳定。
施加最优控制后377()00.0707 3.953s sI A bK s ---==+1,2 1.9765j4.769rad/s λ=-±系统渐近稳定,且阻尼良好。
阻尼比为Re /0.383ζλλ==3、f t →∞时的线性定常系统最优输出调节器若线性定常系统x Ax Bu =+,00()x t x =y C x =能控且能观,u 不受限制,二次型性能泛函为1[]d 2t ty u t J y Q y u Q u t ∞=+⎰式中 ()0y m m Q ⨯≥——输出加权对称常矩阵;()0u r r Q ⨯>——控制加权对称常数矩阵。
求最优控制*()u t ,使min J J →。
参照最优状态调节器的结果,最优输出调节器的最优控制为*1()()()tuu t Kx t Q B Px t -==-式中 1()tn n uK Q B P -⨯=-为最优定常状态反馈矩阵()n n P ⨯是满足满足下列黎卡提矩阵代数方程的正定对称常数矩阵:1uty ttPA A P PBQ B P C Q C -+-+=0注意:因黎卡提矩阵代数方程不同,此处所得P 阵与最优状态调节器时的不同,从而最优控制也不同。