Lorenz 系统的最优控制
- 格式:pdf
- 大小:870.49 KB
- 文档页数:2
Lorenz系统的一个线性反馈控制
乔宗敏;朱夜明
【期刊名称】《合肥师范学院学报》
【年(卷),期】2008(026)003
【摘要】研究了Lorenz系统的混沌控制问题,利用线性反馈控制方法设计了一种基于状态变量的线性反馈控制器,通过变量x,y的相互作用实现了不稳定平衡点的稳定控制,并用李雅普诺夫方法证明了在混沌控制器作用下,控制系统的稳定性.数值仿真结果验证了混沌控制器的有效性和鲁棒性.
【总页数】4页(P6-9)
【作者】乔宗敏;朱夜明
【作者单位】合肥师范学院,数学系,安徽,合肥,230061;安徽大学学报编辑部,安徽,合肥,230039
【正文语种】中文
【中图分类】O175.14
【相关文献】
1.一个新的混沌系统的单参数线性反馈控制 [J], 杨高翔
2.Lorenz系统的线性反馈控制 [J], 欧阳克俭;秦金旗;唐驾时
3.非线性反馈控制两个参数不相同的Lorenz系统的混沌同步 [J], 何建明;毛宗源;张波
4.一个生化反应器在线性反馈控制下的全局稳定性分析 [J], 程民权;陈良恒
5.拓扑等价Lorenz系统混沌同步的线性反馈控制 [J], 刘扬正;姜长生;林长圣
因版权原因,仅展示原文概要,查看原文内容请购买。

混沌Lorenz系统的追踪控制研究
林长;张秀莲;刘维庆
【期刊名称】《量子电子学报》
【年(卷),期】2003(20)1
【摘要】采用驱动嵌入参数间断渐变的控制方法,在混沌系统调控中有效地实施动力学特征有序变化的时空行为的追踪控制研究。
数值研究结果表明:在驱动信号的作用下,信号强度的调谐诱发混沌系统运动行为的序列演变特征。
获得受控时空混沌的各类数值模拟结果。
【总页数】5页(P55-59)
【关键词】时空混沌;嵌入参数法;混沌系统;混沌控制;数值模拟
【作者】林长;张秀莲;刘维庆
【作者单位】西北师范大学物理与电子工程学院
【正文语种】中文
【中图分类】O415.5
【相关文献】
1.超混沌Lorenz系统的追踪控制与同步 [J], 陈光平
2.基于20-sim软件的Lorenz混沌系统的追踪控制 [J], 张津京;裴东
3.Lorenz混沌系统的追踪控制 [J], 胡爱花;徐振源;李芳
4.参数未知的分数阶超混沌Lorenz系统的自适应追踪控制与同步 [J], 赵灵冬;胡
建兵;刘旭辉
5.一个新复类Lorenz混沌系统的分析与追踪控制 [J], 彭建奎;俞建宁;张莉
因版权原因,仅展示原文概要,查看原文内容请购买。
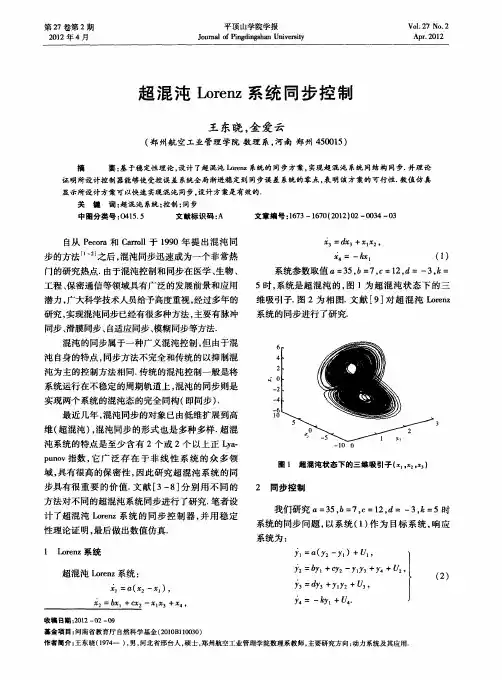
一个简化Lorenz 混沌系统的active同步控制【摘要】本文首先分析了简化Lorenz 混沌系统的基本动力学行为,然后利用active控制方法研究了该系统的同步问题,数值仿真表明的控制器的有效性.【关键词】混沌系统; active控制;同步自从20世纪60年代美国科学家Lorenz[1]在气象数值研究中偶然发现了第一个混沌吸引子以来,混沌已在许多领域中获得了巨大而深远的影响,并且许多新的自治混沌系统也相继被提出,如Rossler系统[2],并且得到了广泛的研究. 混沌控制与同步已经应用到很多方面,如生物工程、信息过程、信息保密通信,以及进行经济预测和工程管理等.混沌控制与同步的方法有很多种,如线性与非线性反馈控制[3]active控制[4]等.1系统模型文献[5]研究了一个简化的Lorenz 混沌系统:■=10(y-x)■=(24-4c)x-xz+cy■■=xy-■z(1)其中c为系统参数,当c∈(-1.59,7.75)时,系统是混沌的,特别的当c=-1时,该系统就为典型的Lorenz混沌系统. 当c=-1.5时,其混沌吸引子如图1所示,本文考察c<0的情况.图1c=-1.5时的吸引子2混沌的同步将系统(1)作为驱动系统,响应系统为■1=10(y1-x1)+u1(t),■1=(24-4c)x1-x1z1+cy1+u2(t),■■1=x1y1-■z1+u3(t).(2)其中u=[u1(t),u2(t),u3(t)]T,作为active控制函数.令e1=x1-x,e2=y1-y,e3=z1-z,则误差系统为■1=10(e2-e1)+u1(t),■2=(24-4c)e1-x1e3-ze1+ce2+u2(t),■■3=x1e2+e1y-■e3+u3(t),(3)取active控制函数u=[u1(t),u2(t),u3(t)]T为u1(t)=v1(t)u2(t)=x1e3+ze1+v2(t)u3(t)=-x1e2-e1y+v3(t),则系统(3)化为■1=10(e2-e1)+v1(t),■2=(24-4c)e1+ce2+v2(t),■■3=-■e3+v3(t),(4)则系统(4)转化控制函数v=[v1(t),v2(t),v3(t)]T的一个线性系统.取v=[v1(t),v2(t),v3(t)]T=A(e1,e2,e3)T,其中A=01004c-2400000.则有■1■2■3=Be1e2e2= -10000c000-■e1e2e2。
2015年度本科生毕业论文(设计)Lorenz混沌系统的自适应同步控制院-系: 数学学院数学与应用数学系专业: 数学与应用数学年级: 2011级学生姓名: 木三刀导师及职称: 李达(教授)2015年5月2010 Annual Graduation Thesis (Project) of the College Undergraduate Synchronization of Lorenzsystem by adaptivecontrolDepartment:College of MathematicsMajor:Mathematics and Applied MathematicsGrade: 2011Student’s Name: Mu SadaoTutor:Li Da(Professor)Finished by June, 2015毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。
据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:毕业论文(设计)授权使用说明本论文(设计)作者完全了解红河学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。
有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。
学校可以公布论文(设计)的全部或部分内容。
保密的论文(设计)在解密后适用本规定。
作者签名:指导教师签名:日期:日期:李雪毕业论文(设计)答辩委员会(答辩小组)成员名单姓名职称单位备注主席(组长)摘要本文考虑Lorenz混沌系统的自适应同步问题。
通过设计一个适当的自适应控制器,利用Lyapunov函数的稳定性理论并通过严格的数学证明得到自适应同步的充分条件。
Lorenz混沌系统的同步控制及实验研究的开题报告一、研究背景混沌理论是近几十年来发展起来的一种新兴的研究领域,深刻揭示并证明了物理系统中常见的混沌行为是由微小的非线性动力学效应引起的,混沌系统可广泛应用于密码学、通信、认知科学等领域。
针对混沌系统应用的实际需求,研究混沌系统的控制和同步问题已成为该领域的热点之一。
Lorenz混沌系统是混沌系统的代表性之一,其著名的“蝴蝶效应”吸引了广泛的关注,很多科学家和工程师致力于对其进行研究和应用。
二、研究内容本课题将以Lorenz混沌系统为研究对象,通过控制器设计和同步控制方法,研究Lorenz混沌系统的同步控制问题。
1. Lorenz混沌系统介绍Lorenz混沌系统是非线性动力学系统中经典的例子,由美国经济学家Edward Lorenz于1963年首先提出。
Lorenz混沌系统是由三个非线性的一阶微分方程组成,它可以产生具有奇异吸引子的混沌行为。
2. 同步控制原理同步控制是指控制多个非线性系统以相同方式响应一个或多个控制器信号的过程。
同步控制技术可以广泛应用于通信、控制、加密等领域。
Lorenz混沌系统的同步控制是非线性动力学领域的重要问题之一。
3. 实验研究在本研究中,将使用Matlab软件对Lorenz混沌系统进行数值仿真,并通过设计反馈控制器和使用同步控制方法,实现Lorenz混沌系统的同步控制。
三、研究意义本研究将探索Lorenz混沌系统的控制和同步问题,具体有以下研究意义:1. 深入理解混沌系统的动力学特性和同步控制原理,掌握混沌理论基础知识。
2. 掌握Matlab软件的使用,熟悉编程技巧和方法。
3. 研究Lorenz混沌系统的同步控制方法,为实际系统应用提供参考和借鉴。
4. 探索混沌系统的应用前景和潜力,为实际应用提供支持和帮助。
四、预期成果1. 完成Lorenz混沌系统的数值仿真,探究其动力学特性。
2. 设计反馈控制器,实现Lorenz混沌系统的同步控制。
- 37 -Lorenz 系统的最优控制周俊冬 马 明(南通广播电视大学,江苏 南通 226006)【摘 要】文章讨论了Lorenz 系统的最优控制问题,将该混沌系统控制到任意所期望的状态。
基于哈密顿-雅可比-贝尔曼方程将构建最优控制器问题归结为解偏微分方程问题,通过巧妙构造Lyapunov 函数从而得到最优控制器。
数值仿真表明,所设计的控制器实用有效并且易于实现。
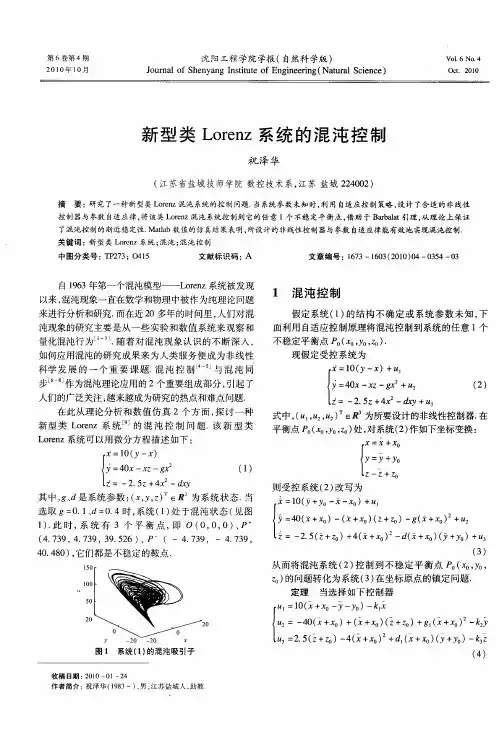
【关键词】Lorenz 系统;最优控制;哈密顿-雅可比-贝尔曼方程 【中图分类号】TP273 【文献标识码】A 【文章编号】1008-1151(2010)05-0037-02(一)引言1963年Lorenz 发现了第一个混沌吸引子——Lorenz 系统,从此揭开了混沌研究的序幕。
Lorenz 系统在信息加密和保密通信等领域有着广阔的应用前景,自从Pecora 和Carroll 提出混沌系统控制的观点和理论以后,线性和非线性反馈控制、自适应控制、延迟控制、变结构控制等多种不同方法都被成功地应用于Lorenz 混沌系统的控制中。
近十多年来,混沌控制的研究得到了蓬勃的发展,这一方向迅速成为混沌和控制学科交叉研究的热点,其间,人们提出了各种混沌控制方法,其中优化控制是一种在系统控制中应用最为广泛的手段,通常给定性能指标,或称目标函数泛函,寻找一容许控制,使目标泛函沿系统所有可能的状态轨迹取最小值。
目前,国内外学者已提出许多不同的混沌最优控制方法,并且问题最后都归结为求解动态规划中所涉及的偏微分方程。
实际上,在许多情况下,动态规划中的偏微分方程的解是不存在或不惟一的。
因此,求解动态规划中的偏微分方程是获得非线性系统最优控制的主要障碍。
本文针对Lorenz系统提出了一种最优控制方法,将该混沌系统控制到任意所期望的状态。
基于哈密顿-雅可比-贝尔曼方程将构建最优控制器问题归结为解偏微分方程问题,通过巧妙构造Lyapunov函数从而得到最优控制器,同时找出了哈密顿-雅可比-贝尔曼方程的解。
仿真结果表明该方法的有效性。
(二)哈密顿-雅可比-贝尔曼方程设一个连续的非线性动力系统方程为:*()()(),()0x t f x g x u f x =+=& (1) 式中n x R ∈是状态变量,m u R ∈是控制器,():n n f x R R →和():n n m g x R R ×→是连续函数,驱使系统从任意初始值到任意确定点*x 的最优控制方案是,使目标函数[][()]TJ u q x u Ru dt ∞=+∫ (2)取得最小值,式中()q x 是连续、可微且正定的函数,根据动态规划,最优控制归结为Hamilton-Jacobi-Bellman 偏微分方程:min 0u Uu u dS dS dt dt ωω∈=⎛⎞⎛⎞+=+=⎜⎟⎜⎟⎝⎠⎝⎠ (3) 式中()T q x u Ru ω=+,(())min[()]T tu US x t q x u Ru dt ∞∈=+∫,U 为所有控制器的集合。
0u 为最优控制(三)Lorenz系统的最优控制Lorenz 系统的数学模型为:121212133123()xa x x x bx x x x xx x cx =−⎧⎪=−−⎨⎪=−⎩&&& (4) 当参数10a =、28b =、83c =时,系统是混沌的,图1显示了系统的混沌吸引子。
下面把该混沌系统从任意初始点稳定到任意给定的目标点****123(,,)Tx x x x =。
x (3)图1 Lorenz 系统的混沌吸引子控制器分为前馈控制****123(,,)T u u u u =和反馈控制123(,,)T u u u u =两部分,那么系统(4)变为:*12111*2121322*312333()x a x x u u x bx x x x u u x x x cx u u ⎧=−++⎪=−−++⎨⎪=−++⎩&&& (5) 取前馈控制为:***1122*******212133113******312122132u ax ax ax u bx x x x x x x x u x x x x x x cx ⎧=−+⎪=−+++−⎨⎪=−−+⎩ (6) 则受控系统(5)变为:【收稿日期】2010-01-29【作者简介】周俊冬,南通广播电视大学机械工程系教师;马明,南通广播电视大学机械工程系教师。
- 38 -**111221****2112211332***31122333()()()()()()()()()x a x x a x x u x b x x x x x x x x u x x x x x c x x u ⎧=−−−−+⎪=−−−−−−+⎨⎪=−−−−+⎩&&& (7) 下面确定最优控制u 将系统(7)从任意初始点控制到目标点****123(,,)T x x x x =。
定义一个目标函数:*2*2*22221112223331122330[][()()()]J u m x x m x x m x x r u r u r u dt ∞=−+−+−+++∫(8)式中1m ,2m ,3m ,1r ,2r ,3r 是正常数,并记3*22221122331()i i i i m x x ru r u r u ω==−+++∑。
显然ω是正定的函数。
根据动态规划,如果(8)的最小值存在,并且存在光滑函数S 满足哈密顿-雅可比-贝尔曼方程(3),此时的控制器u 为最优控制0u 。
下面构造函数S ,一方面应满足方程(3),另一方面还要使系统(7)稳定到点*x 。
取函数S 为:*2*2*2111222333()()()S s x x s x x s x x =−+−+− (9) 式中1s 、2s 、3s 为正常数,所以,函数S 为正定函数。
根据Lyapunov 稳定性理论,令函数S 为系统(7)的Lyapunov 函数,如果0u u =是一个最优控制器,那么哈密顿-雅可比-贝尔曼方程变为:0dS dtω+=,即dS dtω=−。
因为ω是正定的,所以,dS dt是负定的,所以系统(7)在点*x 处稳定。
为求最优控制器0u ,将函数S 和系统(7)代入方程(3)得:{***11111221*****222112211331min 2()[()()]2()[()()()()]u Us x x a x x a x x u s x x b x x x x x x x x u ∈−−−−−++−−−−−−−+}****33311223332()[()()()]0s x x x x x x c x x u ω+−−−−−++= (10) 由0,1,2,3i dS i u dt ω∂⎛⎞+==⎜⎟∂⎝⎠,可得最优控制器为:0*111110*222220*33333()()()s u x x r s u x x r s u x x r ⎧=−−⎪⎪⎪=−−⎨⎪⎪=−−⎪⎩(11) 将式(11)代入式(10),比较两边系数得:2111120s as m r −−+=,21bs as =,2222220s s m r −−+= 23s s =,2333320s cs m r −−+= (12)据以上讨论得如下定理。
定理 1 在施加前馈控制器(6)和最优反馈控制器(11)后。
混沌系统(4)能从任意初始点稳定到给定的目标点*x ,其中相关系数满足式(12),并且i m 、i r 、i s (1,2,3i =)为正常数。
(四)数值仿真运用Matlab 数值仿真,取11344m =,2120m =,34603m =,1231r r r ===。
根据式(12)得:128s =,2310s s ==,参数10a =、28b =、83c =,那么受控系统(7)变为:**11122****211221133***311223338()10()28()11()()()38()()()3x x x x x x x x x x x x x x x x x x x x x ⎧⎪=−−−−⎪=−−−−−−⎨⎪⎪=−−−−⎩&&& 驱使Lorenz 系统从初始点(2,3,5)到目标点(0,0,2)的时序图如图2所示。
时间t/sx图2 控制Lorenz 系统到点(0,0,2)的时序图(五)小结本文针对Lorenz 系统提出了一种最优控制方法,将该混沌系统控制到任意所期望的状态。
基于哈密顿-雅可比-贝尔曼方程将构建最优控制器问题归结为解偏微分方程问题,通过巧妙构造Lyapunov 函数从而得到最优控制器。
仿真结果表明该方法的有效性。
【参考文献】[1] Lorenz E N. Deterministic non-periodic flows[J].J Atmos Sci,1963,20:130-141. [2] Ott E,Grebogi C,Yorke J A.Controlling chaos[J].Phys. Rev. Lett,1990,64:1196-1199. [3] Pcora L M ,Carroll T L .Synchronization in chaotic systems[J].Phys. Rev. Lett,1990,64(8):821-824. [4] Yassen M T.The optimal control of Chen chaotic dynamical system[J].Applied Mathematics and Computation, 2002, 131:171-180. [5] Awad El-Gohary,F.Bukhari.Optimal control of Lorenz system during different time intervals[J].Applied Mathematics and Computation,2003,144:337-351.。