计算二维凸包的Graham_Scan算法
- 格式:pdf
- 大小:155.28 KB
- 文档页数:4

凸包算法公式凸包是计算几何中的一个重要概念,而凸包算法公式则是解决相关问题的关键工具。
咱先来说说啥是凸包。
想象一下,你面前有一堆散落在地上的钉子,然后你拿一个橡皮筋把最外层的钉子圈起来,让橡皮筋形成的形状能够完全包住所有钉子,这个形状就是这堆钉子的凸包。
凸包算法有好几种,比如 Graham 扫描法、Jarvis 步进法等等。
咱就拿 Graham 扫描法来说说它涉及的公式。
Graham 扫描法里,首先要找到一个基准点。
通常找纵坐标最小的点,如果有多个这样的点,就选横坐标最小的那个。
找到这个点后,其他点就按照和这个基准点的极角大小进行排序。
这里就涉及到计算极角的公式啦。
对于两个点 A(x1, y1)和 B(x2, y2),极角θ 可以通过反正切函数来计算,公式是:θ = atan2(y2 - y1, x2 - x1)。
计算出极角后,就可以开始扫描了。
从基准点开始,依次检查相邻的三个点,如果这三个点构成的转向是逆时针的,那就保留中间那个点;如果是顺时针的,就把中间那个点去掉。
这里判断转向的公式就比较关键了。
对于三个点 A(x1, y1)、B(x2,y2)和 C(x3, y3),可以通过计算向量叉积来判断转向。
如果叉积大于 0 ,就是逆时针;小于 0 ,就是顺时针。
向量叉积的公式是:(x2 - x1) * (y3 - y1) - (y2 - y1) * (x3 - x1) 。
我记得之前有一次参加数学建模比赛,题目就和凸包算法有关。
当时我们小组几个人,一开始对这些公式和算法都不太熟悉,急得像热锅上的蚂蚁。
大家一起熬夜查资料、讨论,一遍遍地推导公式,尝试不同的方法。
特别是在计算极角和判断转向的时候,总是出错。
但经过不断地尝试和纠错,我们终于搞清楚了这些公式的应用,成功解决了问题,还拿到了不错的名次。
总之,凸包算法公式虽然看起来有点复杂,但只要掌握了其中的原理和规律,多做练习,就能熟练运用啦。
不管是在数学研究中,还是在实际的计算机图形学、地理信息系统等领域,凸包算法都有着广泛的应用。


葛立恒扫描法葛立恒扫描法(Graham Scan),又称凸包算法,是解决计算几何问题中的经典算法之一。
它的主要作用是计算多边形或点集的凸包,并返回凸包上的点集。
葛立恒扫描法的时间复杂度为O(nlogn),其中n是输入点集的大小。
凸包是一个简单多边形,可以包含给定点集中的所有点。
它的边界是由点集中的一些点组成的,这些点被称为凸包上的顶点。
凸包在计算几何、图形学以及计算机视觉等领域都有广泛的应用。
葛立恒扫描法的运行过程如下:1. 找到y值最小的点,并将它放在结果集中。
2. 将其余所有点按照与y值最小点的极角进行排序。
3. 对于每个点P,计算它与前两个点的极角。
如果它的角度不在逆时针方向,则将倒数第二个点从结果集中删除,然后重复此过程直到极角正确。
4. 返回结果集。
让我们来详细了解葛立恒扫描法的每个步骤。
找到y值最小的点要找到y值最小的点,我们可以遍历所有点,并找到纵坐标最小的那个。
在这里,我们使用了lambda函数来比较每个点的y值。
```python def find_lowest_point(points): lowest = min(points, key=lambda point: point[1]) return lowest ```排序接下来,我们需要将其余所有点按照与y值最小点的极角进行排序。
为此,我们需要定义一个函数来计算两点之间的极角。
在这里,我们使用了arctan2函数来计算极角。
```python def polar_angle(p1, p2=None): if p2 is None: p2 = lowest_point y_span =p1[1] - p2[1] x_span = p1[0] - p2[0] return atan2(y_span, x_span) ```然后,我们可以使用此函数来排序输入点集。
在这里,我们使用了sorted函数来排序。
```python def sort_points(points):sorted_points = sorted( points,key=cmp_to_key(lambda x,y: 1 if polar_angle(x) < polar_angle(y) else -1) ) returnsorted_points ```计算极角接下来,我们需要为每个点计算它与前两个点的极角。
探求二维凸包及其应用许瑞广,余志伟中国矿业大学(北京)资源学院(100083)E-mail :lucky_xrg@摘 要:凸包是计算几何中最普遍、最基本的一种结构,本文介绍了二维凸包的概念和性质,并介绍几种求二维凸包的方法:Gift-Wrapping 、Graham-Scan 算法,以及这几种算法的正确性和时间复杂度的分析,最后通过两个实例来简要介绍二维凸包的应用。
关键字:凸包、Gift-Wrapping 、Graham-Scan作为计算几何中第一个被深入研究的几何模型,凸包以其优美的性质带来了广泛的应用,本文将对这个几何模型进行简要的介绍。
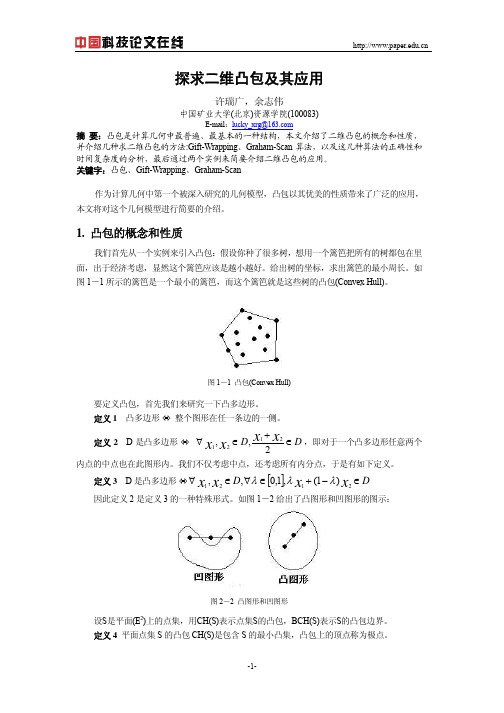
1. 凸包的概念和性质我们首先从一个实例来引入凸包:假设你种了很多树,想用一个篱笆把所有的树都包在里面,出于经济考虑,显然这个篱笆应该是越小越好。
给出树的坐标,求出篱笆的最小周长。
如图1-1所示的篱笆是一个最小的篱笆,而这个篱笆就是这些树的凸包(Convex Hull)。
图1-1 凸包(Convex Hull)要定义凸包,首先我们来研究一下凸多边形。
定义1 凸多边形Ù整个图形在任一条边的一侧。
定义2 D 是凸多边形ÙD D x x xx ∈+∈∀2,,2121,即对于一个凸多边形任意两个内点的中点也在此图形内。
我们不仅考虑中点,还考虑所有内分点,于是有如下定义。
定义3 D 是凸多边形Ù[]D D x x xx ∈−+∈∀∈∀2121)1(,1,0,,λλλ因此定义2是定义3的一种特殊形式。
如图1-2给出了凸图形和凹图形的图示:图2-2 凸图形和凹图形设S 是平面(E 2)上的点集,用CH(S)表示点集S 的凸包,BCH(S)表示S 的凸包边界。
定义4 平面点集S 的凸包CH(S)是包含S 的最小凸集,凸包上的顶点称为极点。
点集S 的凸包是包含S 的所有凸集的并,或者CH(S)是包含S 的所有半空间的交。
二维中的半空间是半平面,它是指位于一条直线上及该线一侧的点的集合。
把点集凸包化Granham-Scan算法(使用水平序)#include<stdio.h>#include<string.h>#include<math.h>#include<algorithm>using nameaace std;const int M=100000+5;struct Point{double x,y;} p[M];double dis(Point A,Point B){return sqrt((B.x-A.x)*(B.x-A.x)+(B.y-A.y)*(B.y-A.y));}bool cmp(Point a,Point b){if (a.x<b.x) return true;if (a.x>b.x) return false;if (a.y<b.y) return true;return false;}double Xdet(Point A,Point B,Point C){double x1,x2,y1,y2;x1=B.x-A.x; y1=B.y-A.y; x2=C.x-A.x; y2=C.y-A.y;return x1*y2-x2*y1; //大于0在左手边,逆时针}bool bo[M];Point pp[M];int stack[M]; //from 1 to tvoid Gram_Scan(Point *p,int &n) //p从1-n,把点集土包化 n*log(n); {int i,t;sort(p+1,p+1+n,cmp);for(t=0,i=1;i<=n;i++){ //合并排序if (i>1 && p[i].x==p[i-1].x && p[i].y==p[i-1].y) continue;p[++t]=p[i];}n=t; t=0;memset(bo+1,true,n*sizeof(bo[0]));if (n>0){stack[++t]=1;bo[stack[t]]=false;}if (n>1){stack[++t]=2;bo[stack[t]]=false;}if (n>2){for(i=3;i<n;i++)if(bo[i] && Xdet(p[stack[t-1]],p[stack[t]],p[i])>=0) stack[++t]=i,bo[i]=false;else{while(t>=2&& Xdet(p[stack[t-1]],p[stack[t]],p[i])<0) bo[stack[t]]=true,t--;stack[++t]=i;bo[stack[t]]=false;}for(i=n;i>=1;i--)if (bo[i] && Xdet(p[stack[t-1]],p[stack[t]],p[i])>=0) stack[++t]=i,bo[i]=false;else{while(t>=2&&Xdet(p[stack[t-1]],p[stack[t]],p[i])<0) bo[stack[t]]=true,t--;stack[++t]=i;bo[stack[t]]=false;}t--;}for(i=1;i<=t;i++) pp[i]=p[stack[i]];memcpy(p+1,pp+1,t*sizeof(Point));n=t;}求凸点集的面积double area(Point *p,int n){double sum=0;int i;p[n+1]=p[1];for(i=1;i<=n;i++)sum+=p[i].x*p[i+1].y-p[i].y*p[i+1].x;return sum/2.0;}const double EPS=1e-9;const double maxn=1e6-1;const double PI=acos(-1.);const int M=100+5;const double offset=11213;#define zero(x) (((x)>0?(x):-(x))<EPS)struct Point{double x,y;} p[M];struct LINESEG{Point st,ed;};struct LINE{double a,b,c;};double dist(Point a,Point b){return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));}double multiply(Point a,Point b,Point c){return (a.x-c.x)*(b.y-c.y)-(b.x-c.x)*(a.y-c.y);}double dotmultiply(Point a,Point b,Point c){return (a.x-c.x)*(b.x-c.x)+(a.y-c.y)*(b.y-c.y);}bool online(LINESEG L,Point q){return fabs(multiply(L.ed,q,L.st))<EPS && (q.x-L.st.x)*(q.x-L.ed.x)<EPS && (q.y-L.st.y)*(q.y-L.ed.y)<EPS; }LINE makeline(Point p1,Point p2){LINE tl;tl.a=p2.y-p1.y; tl.b=p1.x-p2.x;tl.c=p1.y*p2.x-p1.x*p2.y;if (tl.a<EPS) tl.a=-tl.a,tl.b=-tl.b,tl.c=-tl.c;return tl;}inline double MAX(double x,double y){return x>y?x:y;}inline double MIN(double x,double y){return x<y?x:y;}bool intersect(LINESEG u,LINESEG v){return MAX(u.st.x,u.ed.x)>=MIN(v.st.x,v.ed.x)&& MAX(v.st.x,v.ed.x)>=MIN(u.st.x,u.ed.x)&& MAX(u.st.y,u.ed.y)>=MIN(v.st.y,v.ed.y)&& MAX(v.st.y,v.ed.y)>=MIN(u.st.y,u.ed.y)&& multiply(v.st,u.ed,u.st)*multiply(u.ed,v.ed,u.st)>=0&& multiply(u.st,v.ed,v.st)*multiply(v.ed,u.ed,v.st)>=0;}bool intersect_A(LINESEG u,LINESEG v){return intersect(u,v) && !online(u,v.st) && !online(u,v.ed)&& !online(v,u.st) && !online(u,v.ed);}bool intersect_L(LINESEG u,LINESEG v){return multiply(u.st,v.ed,v.st)*multiply(v.ed,u.ed,v.st)>=0;}bool intersection_line(LINE L1,LINE L2,Point &inter){ double det=L1.a*L2.b-L2.a*L1.b;if (fabs(det)<EPS) return false;inter.x=(L2.c*L1.b-L1.c*L2.b)/det;inter.y=(L2.a*L1.c-L1.a*L2.c)/det;return true;}bool intersection_lineseg(LINESEG u,LINESEG v,Point &inter){ LINE L1,L2;L1=makeline(u.st,u.ed);L2=makeline(v.st,v.ed);if (intersection_line(L1,L2,inter)) return online(u,inter) && online(v,inter);else return false;}bool intersection_LLS(LINE L1,LINESEG u,Point &inter){ LINE L2;L2=makeline(u.st,u.ed);if (intersection_line(L1,L2,inter))return online(u,inter);else return false;}int Inside(Point q,int n){Point q2;const int on_edge=0;int i=0,count;p[n]=p[0];while (i<n)for(count=0,i=0,q2.x=rand()+offset,q2.y=rand()+offset;i<n;i++)if (zero(multiply(q,p[i],p[i+1])) && (p[i].x-q.x)*(p[i+1].x-q.x)<EPS && (p[i].y-q.y)*(p[i+1].y-q.y)<EPS) return on_edge;else if (zero(multiply(q,q2,p[i]))) break;else if (multiply(q,p[i],q2)*multiply(q,p[i+1],q2)<-EPS &&multiply(p[i],q,p[i+1])*multiply(p[i],q2,p[i+1])<-EPS) count++;return count&1;}bool cmp(Point p,Point q){if (p.x<q.x) return true;if (p.x>q.x) return false;if (p.y<q.y) return true;return false;}//线段与多边形相交定义为至少有1个点在多边形内,返回true; bool LINESEG_intersect_Polygon(LINESEG LS1,int n) {LINESEG LS2;Point mid;int i;int j,top;Point stack[M];p[n]=p[000];for(i=0;i<n;i++){LS2.st=p[i]; LS2.ed=p[i+1];if (intersect_A(LS1,LS2)) return true;}top=0;stack[top++]=LS1.st;stack[top++]=LS1.ed;for(i=0;i<n;i++)if (online(LS1,p[i])) stack[top++]=p[i];sort(stack,stack+top,cmp);stack[top]=stack[0];for(j=0;j<top;j++) {mid.x=(stack[j].x+stack[j+1].x)/2;mid.y=(stack[j].y+stack[j+1].y)/2;if (Inside(mid,n)) return true;}return false;}const int M=15000;struct Line{double a,b,c;}L[M];struct Point{double x,y;} p[M],pp[M];//由两点化一般式Line LineChange(Point P1,Point P2){Line K;K.a=P2.y-P1.y;//(y2-y1)*x+(x1-x2)*y-(x1-x2)*y1-x1*(y2-y1)=0; counterclockK.b=P1.x-P2.x;K.c=-P1.x*K.a-K.b*P1.y;return k;}//求两直线交点bool GetSegcross(Line K1,Line K2,Point &pp){double det=K1.a*K2.b-K2.a*K1.b;if (fabs(det)<1e-8) return 0;pp.x=(K1.b*K2.c-K2.b*K1.c)/det;pp.y=-(K1.a*K2.c-K2.a*K1.c)/det;return 1;}//p在直线上返回0.00double p_on_line(Line K,Point p){return K.a*p.x+K.b*p.y+K.c;}//求两点的垂直平分线void MidLine(Point P1,Point P2,Line &K){K.a=2*(P1.x-P2.x);K.b=2*(P1.y-P2.y);K.c=(-K.a*(P1.x+P2.x)-K.b*(P1.y+P2.y))/2;}//求任意点对的最小距离,分治nlogn.double nearest(Point *p, int n) //p should already be sorted by x{if(n==2) return dist(p[0], p[1]);if(n==1) return INF;int m=p[n/2].x,i,j;double left,right,tmp,ret,t;left=nearest(p,n/2); right=nearest(&p[n/2],n-n/2);ret=tmp =left<right?left:right;for(i=n/2-1; i>=0 && p[i].x>m-tmp_nearest;i--)for(j=n/2; j<n && p[j].x<m+tmp_nearest;j++) {t=dist(p[i],p[j]);if(t<tmp_nearest) ret=t;}return ret;}Euler的任意四面体体积公式(已知边长求体积)已知4点坐标求体积(其中四个点的坐标分别为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),(x4,y4,z4))11111234(1/6)*.12341234x x x xVy y y yz z z z=22222222222222222222222236.2222p q n p r mpp q n q r lV qp r m q r lr+-+-+-+-=+-+-。

确定凸包上的点---Graham扫描法---java实现假设平⾯上给出N个点,现在要求过上⾯的点把所有的点都包起来,并且周长最⼩,这些点就是凸包上的点。
确定凸包上的点有多种做法,但是只有Graham扫描时间复杂度稳定在nlog(n)上,所以就记录⼀下这个算法。
步骤:1.找出给定点中最靠近左下⽅的点2.通过这个点与其它点连线与⽔平⽅向会构成夹⾓,根据夹⾓⼤⼩进⾏由⼩到⼤排序3.根据动图中的情况,来说明扫描过程。
Graham扫描过程凸多边形的边从最左下⾓点开始,逆时针的相邻三个点P0,P1,P2构成的向量<P0,P1>,<P1,P2>的夹⾓都是⼤于0的。
也就是说,针对途中的情况,P2,P4,P5点是不可能在凸包上的。
假设P4在凸包上,那么对于P3,P4,P6来说,<P3,P4>,<P4,P6>向量的的夹⾓是⼩于0的,最后会呈现凹多边形的形态。
以P0,P1,P2,P3,P4,P5,P6来说明确定凸包点的计算⽅式:(1)使⽤栈来存储最终位于凸包上的点的位置。
(2)最开始排好顺序的三个点P0,P1,P2⼀定能够组成凸多边形,将它们压⼊栈中S[P2,P1,P0],并且P1⼀定在凸包上,现在不确定的就是P2是否真的在凸包上(有内⿁?::aru:discovertruth:: )(3)对于P3来说,我们使⽤堆栈中第⼆个元素P1,第⼀个元素P2,和扫描到的元素P3,进⾏⽐较,来确认P2到底是不是凸包上的点。
<P1,P2>,<P2,P3>向量构成的夹⾓⼩于0,说明P2⼀定不在凸包上,所以P2可以排除了,将P2从栈中弹出。
P3⼜有可能是凸包上的点,所以堆栈现在存有S[P3,P1,P0]。
(4)对于P4来说,<P1,P3>,<P3,P4>向量(<S[2],S[1]>,<S[1],当前扫描点>)构成的夹⾓是⼤于0的,所以P4有可能是凸包上的点。
Graham Scan算法一、概述Graham Scan算法是一种用于计算凸包的算法,它可以在给定二维平面上的一组点时,找到这些点形成的凸包。
凸包是包围点集的最小凸多边形,它的边界上的点不弯曲向内。
二、算法原理Graham Scan算法采用了一种基于极角排序的方法来求解凸包,其基本思路如下:1.找到y坐标最小的点P0,将P0作为凸包的起点。
2.将其他点按照与P0的极角进行逆时针排序。
3.遍历排序后的点集,如果凸包的点个数小于2,或者遍历点与前两个点的构成的两条线段的转向(顺时针或逆时针)满足逆时针,则将遍历点添加到凸包中;否则,将凸包的最后一个点移除,再添加遍历点。
4.最终的凸包即为所有添加后剩下的点集。
三、算法实现步骤下面将详细介绍Graham Scan算法的实现步骤:1. 寻找起点先确定凸包的起点,即y坐标最小的点P0。
可以通过比较每个点的y坐标找到最小的那个点。
如果有多个点的y坐标相等,选择其中x坐标最小的点。
2. 极角排序对于起点P0之外的其他点,计算它们与P0的极角,并按照极角进行逆时针排序。
计算极角时,可以使用两点之间的斜率来表示,斜率越大则两点之间的角度越小。
3. 构建凸包从排好序的点集中依次取出每个点Pi,将其添加到凸包中。
首先,检查凸包中的点个数是否小于2。
当凸包中的点个数小于2时,直接将Pi 添加到凸包中。
然后,检查凸包中的最后两个点Pi-1和Pi-2构成的线段的转向。
当这两个点以及Pi构成的三个点满足逆时针时,将Pi添加到凸包中。
反之,将凸包中的最后一个点移除,再将Pi添加到凸包中。
4. 输出凸包最终,凸包中包含了输入点集形成的凸多边形。
遍历凸包中的点,按顺序输出它们的坐标,即可得到凸包。
四、算法复杂度分析时间复杂度1.寻找起点:需要遍历所有点来找到起点,时间复杂度为O(n)。
2.极角排序:对n-1个点进行排序,时间复杂度为O(nlogn)。
3.构建凸包:需要遍历所有点,时间复杂度为O(n)。
凸包问题摘要:凸包问题是计算机几何中的一个经典问题,它要求将平面内的点集用最少的凸点将所有的顶点封闭。
凸包问题的应用十分广泛,很多最优化问题经过抽象后可以发现它最终是凸包问题模型;它还可以用于人际关系网络的最小化搜索,通过人际关系,可以合理推断出某人的身份,职位等个人特征。
目前求取凸包的常用算法有:穷举法,格雷厄姆扫描法(Graham),分治法,蛮力法和Jarris 步进法。
其中穷举法与蛮力法都是建立在穷举的算法思想上,它们的时间复杂度比较大,格雷厄姆扫描法采用几何方面的知识,降低了求解过程的时间复杂度。
关键词:凸包问题;计算机几何;格雷厄姆扫描法一、引言凸包问题的完整描述:令S 是平面上的一个点集,封闭S 中所有顶点的最小凸多边形,称为S 的凸包,表示为CH(S)。
如下图一所示,由红色线段表示的多边形就是点集Q={p0,p1,...p12}的凸包。
图一凸包问题是计算机几何的一个经典问题,它可以解决很多优化模型,目前目前求取凸包的常用算法有:穷举法,格雷厄姆扫描法(Graham),分治法,蛮力法和Jarris步进法。
本文主要讨论穷举法,蛮力法,以及格雷厄姆扫描法,通过算法思想的描述,计算出相应的时间复杂度,比较这几种算法的优劣。
二、穷举法穷举法的思想很简单直接,它利用凸包性质—如果点集中的两个点的连线属于凸多边形的边,当且仅当点集中其余的点都在这两个点连线的同一侧。
假设点集合S 中有n 个顶点,则这n 个顶点共可以构成(1)2n n -条边,对于任何一条边来讲,检查其余的n-2 个点的相对于该直线段的正负性。
如果它们有相同的正负性,说明该边是凸多边形的边,反之就不属于凸多边形,继续检查。
算法流程图如下:不相同 相同NY图二:算法流程图上述算法(穷举法)需要执行n(n-1)/2 次,再次检查n-2 个点的正负性,故算法时间复杂性为2(1)2n n -∑=3()o n 。
显然这并非一个高效的算法凸包问题有许多更加有效的算法可以达到log n n 的渐近时间复杂度。
2d多边形凸包碰撞算法解释说明以及概述1. 引言1.1 概述本篇文章将深度探讨2D多边形凸包碰撞算法,解释其原理、说明实现步骤和流程,并介绍算法的优化方法和应用扩展。
此外,我们还将结合实例演示和对比实验结果分析,通过对不同算法之间的对比来评估其性能表现。
最后,我们总结主要结论并展望未来研究方向和应用场景扩展。
1.2 文章结构本文内容将按照以下顺序进行组织:在引言部分,我们将介绍整个文章的概述以及结构安排。
在第二节中,我们将详细解释2D多边形凸包碰撞算法的概念及其关键原理。
第三节将探讨算法优化方法,并基于凸包碰撞的应用案例进行分析。
第四节将介绍具体的实例演示,并设计对比实验来分析不同算法之间的性能差异。
最后,在第五节中,我们将总结主要结论,并提出未来研究方向和应用场景扩展。
1.3 目的本文旨在提供读者对2D多边形凸包碰撞算法有一个清晰全面的理解。
通过深入探讨算法的原理和实现步骤,读者将能够了解如何使用该算法进行碰撞检测。
此外,我们还将介绍优化方法、应用案例和潜在问题的解决方案,以帮助读者更好地应用该算法。
最后,我们希望通过对比实验结果的分析和总结评价,为读者提供选择适合其需求的最佳算法参考,并展望未来研究方向和应用场景扩展的可能性。
2. 2D多边形凸包碰撞算法解释说明2.1 多边形凸包概念介绍在开始解释2D多边形凸包碰撞算法之前,我们首先需要了解多边形的凸包概念。
一个多边形的凸包是指能够包围该多边形的最小凸多边形。
换句话说,对于一个给定的多边形,其凸包由原始多边形上所有顶点组成,并且这些顶点构成一个没有内角大于180度的简单多边形。
2.2 碰撞检测算法原理2D多边形凸包碰撞算法是用来检测两个或多个多边形是否发生碰撞的一种常用方法。
该算法基于分离轴定理(Separating Axis Theorem)和SAT碰撞检测方法。
分离轴定理指出,如果两个凸体在所有可能的分离轴上都有间隙,则它们不会相交。
对于平面上的二维凸体而言,分离轴即为法向量。
计算二维凸包的Graham_Scan算法
凸包的概念:
点集Q的凸包(convex hull)是指一个最小凸多边形,满足Q中的点或者在多边形边上或者在其内。
下图中由红色线段表示的多边形就是点集Q={p0,p1, (12)
的凸包。
凸包的求法:
现在已经证明了凸包算法的时间复杂度下界是O(n*logn),但是当凸包的顶点数h也被考虑进去的话,Krikpatrick和Seidel的剪枝搜索算法可以达到
O(n*logh),在渐进意义下达到最优。
最常用的凸包算法是Graham扫描法和Jarvis 步进法。
本文只简单介绍一下Graham扫描法,其正确性的证明和Jarvis步进法的过程大家可以参考《算法导论》。
对于一个有三个或以上点的点集Q,Graham扫描法的过程如下:
令p0为Q中Y-X坐标排序下最小的点;
设<p1,p2,...pm>为对其余点按以p0为中心的极角逆时针排序所得的点集(如果有多个点有相同的极角,除了距p0最远的点外全部移除;
压p0进栈S;
压p1进栈S;
压p2进栈S;
for i ←3 to m
{
do while{由S的栈顶元素的下一个元素、S的栈顶元素以及pi构成的折线段不拐向左侧}对S弹栈;
压pi进栈S;
}
return S;
此过程执行后,栈S由底至顶的元素就是Q的凸包顶点按逆时针排列的点序列。
需要注意的是,我们对点按极角逆时针排序时,并不需要真正求出极角,只需要求出任意两点的次序就可以了。
而这个步骤可以用前述的矢量叉积性质实现。