智能阀门定位器YT-3400系列使用说明书
- 格式:pdf
- 大小:1.22 MB
- 文档页数:22
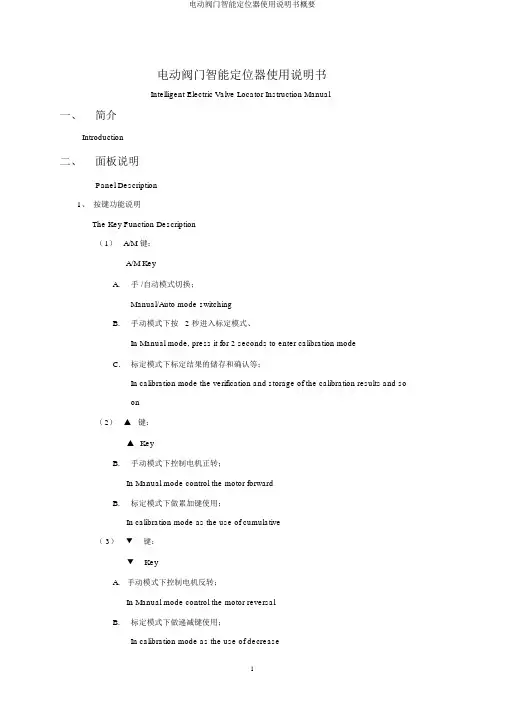
电动阀门智能定位器使用说明书Intelligent Electric Valve Locator Instruction Manual一、简介Introduction二、面板说明Panel Description1、按键功能说明The Key Function Description(1) A/M 键:A/M KeyA.手 /自动模式切换;Manual/Auto mode switchingB.手动模式下按 2 秒进入标定模式、In Manual mode, press it for 2 seconds to enter calibration modeC.标定模式下标定结果的储存和确认等;In calibration mode the verification and storage of the calibration results and soon(2)▲键:▲KeyB.手动模式下控制电机正转;In Manual mode control the motor forwardB.标定模式下做累加键使用;In calibration mode as the use of cumulative( 3)▼键:▼KeyA. 手动模式下控制电机反转;In Manual mode control the motor reversalB.标定模式下做递减键使用;In calibration mode as the use of decreaseC.自动模式下按 2 秒进入初始化模式In Auto mode, press it for 2 seconds to enter the initialization mode2、数码管显示说明(参照表1)LED display description (Table 1)( 1)手动模式下,显示阀门相应开度,显示范围不受0.00~ 100.0 的限制;In Manual mode, display the corresponding valve opening, the display range is notlimited from 0.00 to100.0( 2)自动模式下,正常状态显示目前阀门开度,显示范围不受0.00~ 100.0 的限制;In Auto mode, display the current valve opening, the display range is not limitedfrom 0.00 to100.0( 3)标定模式下,各显示详细含义见标定功能说明;In calibration mode the specific meaning refer to the function description.3、状态 LED 显示说明Status LED display description( 1)OPEN:电动履行器控制输出电路“开”输出有效;Electric actuator control output circuit “opening ”output is effective ( 2)SHUT :电动履行器控制输出电路“闭”输出有效;Electric actuator control output circuit “ closing output” is effective ( 3)MANU :定位器处于手动模式;Locator is in manual mode( 4)AUTO :定位器处于自动模式;Locator is in Auto mode4、用户标定LED 显示说明User calibration LED display description( 1)DRTA :正相标定,即4mA 对应阀门全闭,20mA 对应阀门全开;Normal phase calibration, 4mA corresponds to the valve fully closed,20mAcorresponds to the valve fully open( 2)RVSA :反相标定,即4mA 对应阀门全开,20mA 对应阀门全闭;RP Calibration, 4mA corresponds to the valve fully closed, 20mA corresponds tothe valve fully open( 3)OPEN:无输入信号时,阀门自动调至全开;No input signal, the valve automatically transferred to full open ( 4)STOP:无输入信号时,阀门自动停在目前地点;No input signal, the valve automatically stops at the current location ( 5)SHUT :无输入信号时,阀门自动调至全闭;No input signal, the valve automatically transferred to full closed.三、性能参数 ( Performance parameters)1、控制精度: 0.1% ~ 1.0% (可设置)Control precision: 0.1% ~ 1.0% (can be set)2、工作功耗: <10WWorking Power3、工作电压:沟通100~ 240VOperating Voltage: AC 100 ~ 240V4、电动履行器反应电位器:500 欧姆~ 10K 欧姆Electric actuator feedback potentiometer5、输入信号: 4~ 20mAInput signal6、输入阻抗: 250 欧姆Input impedance7、输出信号: 4~ 20mAOutput signal8、输出信号负载:≤450 欧姆Output Load9、环境温度: -20 ° C~ 70 ° CThe ambient temperature10、环境湿度:≤80% RHThe ambient humidity四、接线说明 ( wiring instructions)五、标定操作 ( calibration operation)在手动状态下,按住A/M 键 5 秒进入参数标定状态按A/M 键按▼键显示 F1-2 显示 F.1.-.2.按 A/M 键按 A/M 键最后确认相位按▼键显示 F2A1 自动标定按 A/M 键按A/M 键按▼键显示 F2H1 最小转角标定按 A/M 键按 A/M 键按▼键显示 F2H2 最大转角标定按 A/M 键按 A/M 键按▼键显示 F3-2 显示 F.3.-.2.按 A/M 键按 A/M 键最后确认模式按▼键显示 --05 显示 -.-.0.5.按 A/M 键按 A/M 键最后确认精度退出标定状态,答复到正常运转状态按▼键选择相位模式按A/M 键显示 F2A1按A/M显示 F2A1按A/M显示 F2A1按▼键无信号模式按A/M 键按▼键改变精度按A/M 键In manual mode, hold down the A / M button for 5 seconds to enter calibration statusPress A / Mpress ▼press ▼Display F1-2Display F.1.-.2. Select Phase Mode Press A/M keyFinal phase confirmationPress A/MPress A/Mpress ▼Display Press A/MDisplay Press A/MF2A1F2H1Automatic calibrationDisplay F2A1Press A/Mpress ▼Press A/MMinimum angle calibration Display F2A1Press A/MPress ▼Press A/MDisplay F2H2Minimum angle calibration Display F2A1Press A/MPress A/Mpress ▼press ▼Display F3-2Display F.3.-.2.No signal mode Press A/MPress A/MPress A/MFinal confirmation modePress ▼Press ▼Display --05Display -.-.0.5.Change the precisionPress A/MFinal accuracy confirmationPress A/MPress A/MOut of calibration status, return to normal operating state1、标定模式进入:手动模式下,按A/M 键并保持 2 秒,将进入标定模式;Enter the calibration mode: in manual mode, press A / M key and keep 2 seconds, will enterthe calibration mode2、相位标定:Phase calibration:(1)显示目前实质相位设置,如是正相模式则显示“F1- 2”,反相模式则显示“ F1- 1”,相应标定 LED 也会被点亮。

智能定位器产品手册YT-3300 / 3350 / 3303 / 3301系列(新软件)YT-3300 (新的NCS型)YT-3350 (新的NCS型)YT-3300 + 内置限位开关YT-3350 + 内置限位开关(电位器类型)(电位器类型)YT-3303YT-3303(电位器类型)YT-3301(电位器类型)Rotork YTC Limited目录1引言 (6)1.1一般用户信息 (6)1.2制造商保修 (6)1.3防爆警告(仅适用于本质安全型定位器) (7)2产品说明 (8)2.1常规信息 (8)2.2主要特点和功能 (8)2.3标签说明 (9)2.4产品代号 (15)YT-3300 / 3350 系列遵循以下后缀符号规则。
(15)YT-3303 系列遵循以下后缀符号规则。
(16)YT-3301 系列遵循以下后缀符号规则。
(17)2.5产品规格 (19)YT-3300 / 3303 / 3350规格 (19)YT-3301规格 (20)2.6证书 (22)2.7部件和组件 (26)YT-3300 / 3350 (26)YT-3303 (27)YT-3301 (28)2.8产品尺寸 (29)YT-3300 (29)YT-3350 (30)YT-3303 (31)YT-3301 (32)3安装 (33)3.1安全 (33)3.2安装工具 (33)3.3直行程定位器安装 (34)标准反馈杆型直行程定位器安装 (34)YT-3300L / 3350L适配器杆型的安装(无导管执行器) (40)3.4角行程定位器安装 (43)YT-3300R / 3350R组件 (43)YT-3303R组件 (44)YT-3301R远程传感器组件 (44)角行程支架信息(仅YT-3300R / 3350R / 3303R) (45)角行程定位器安装步骤 (46)4连接- 空气 (49)4.1安全 (49)4.2供给压力条件 (49)4.3管路连接 (49)4.4连接- 执行器管路 (50)单作用执行器 (50)双作用执行器 (51)5连接- 电源 (52)5.1安全 (52)5.2连接 (53)标准端子 (53)带微型限位开关选件的端子 (54)带感应式接近式限位开关选件的端子 (55)5.3接地 (56)6调节 (57)6.1限位开关调节 (57)6.2A/M开关调节 (58)6.3孔口件安装 (59)板型孔口件安装(YT-3303除外) (59)可变孔口件调节(仅YT-3303) (59)7选配型副PCB安装 (60)7.1安装步骤 (60)8维护 (62)8.1供给压力 (62)8.2密封件 (62)9自动校准和PCB操作 (63)9.1警告 (63)9.2LCD显示器和按钮 (63)LCD显示器和符号 (63)按钮和功能 (64)9.3菜单层级 (65)9.4运行模式监控 (66)9.5配置和操作 (67)9.6校准(CALIb) (71)动作类型(SINGLE / dOUBLE) (72)自动校准1(AUTO 1) (72)自动校准2(AUTO 2) (73)自动校准3(AUTO 3) (74)行程零点(TVL ZERO)和行程终点(TVL ENd) (75)9.7手动操作(MAN OPER) (76)通过设置位置进行手动操作(MAN SP) (76)利用MV进行手动操作(MAN MV) (76)9.8控制参数(CTL PARM) (77)死区(dEAdbANd) (77)向前P参数(KP UP)和向后P参数(KP dN) (78)向前积分时间参数(TI UP)和反向积分时间参数(TI dN) (78)向前D参数(Kd UP)和向后D参数(Kd dN) (79)GAP参数(GAP) (79)GAP P参数(GP) (80)GAP I参数(GI) (80)GAP D parameter (Gd) (80)自动死区模式(AUTO db) (81)性能模式(PER STbL / NORM / FAST) (81)9.9输入配置(IN CFG) (82)信号方向(SIG NORM / REVS) (82)分程模式(SPLIT 4.20 / 4.12 / 12.20 / CSt) (83)自定义分程模式零点(CST ZERO) (83)自定义分程模式终点(CST ENd) (84)阀门流量特性曲线(CHAR LIN / EQ / USER 5P / USER 21P) (84)用户设置5个特性点(USER 5P) (85)用户设置21个特性点(USER 21P) (86)用力打开(TSHUT OP) (87)用力关闭(TSHUT CL) (88)目标位置上升速率(RAMP UP)和目标位置下降速率(RAMP dN) (89)9.10输出配置(OUT CFG) (91)位置发送器方向(PTM NORM / REVS) (91)位置发送器零点/终点(PTM ZERO / ENd) (92)HART反馈方向(HT NORM / REVS) (93)反算(bACKCAL oFF / on) (94)9.11设备配置(dEV CFG) (95)动作设置(ACT) (95)直行程反馈杆设置模式(LEVT STd / AdT) (95)直行程差值(ITP oFF / on) (96)参数锁定(Write Protect,W UNLOCK / LOCK) (96)实际位置查看模式(View Mode,VI NORM / REVS) (96)轮询地址设置(POL AddR) (97)出厂重置(dEFAULT oFF / on) (97)定位器自测试(SELFTEST) (98)9.12诊断模式(dIAGNd) (99)默认警报设置 (100)程序状态(PS) (101)设备状态(dS) (102)查看监控计数(VI CNTS) (103)诊断限值配置(LIMT CFG) (104)重置警报状态(RST ALRM OFF / on) (105)查看事件日志(EVT LOG) (106)局部行程测试记录(查看PST结果记录,PST RSLT) (107)PST配置(PST CFG) (108)运行PST(PST NOW) (109)定期PST测试(PST计划,PST SCHd oFF / on) (109)9.13位置信息(INFO) (110)9.14自动校准过程中显示的错误代码 (112)9.15状态和警报代号 (113)10主要软件地图 (115)1 引言1.1 一般用户信息感谢您购买Rotork YTC Limited产品。
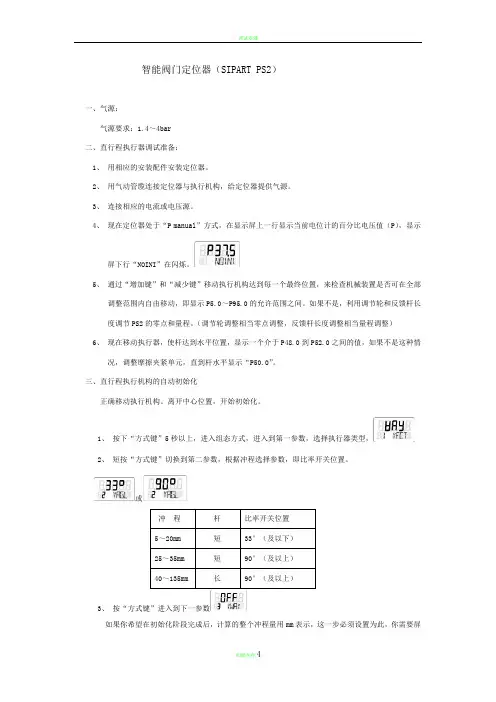
智能阀门定位器(SIPART PS2)一、气源:气源要求:1.4~4bar二、直行程执行器调试准备:1、用相应的安装配件安装定位器。
2、用气动管缆连接定位器与执行机构,给定位器提供气源。
3、连接相应的电流或电压源。
4、现在定位器处于“P manual”方式,在显示屏上一行显示当前电位计的百分比电压值(P),显示屏下行“NOINI”在闪烁。
5、通过“增加键”和“减少键”移动执行机构达到每一个最终位置,来检查机械装置是否可在全部调整范围内自由移动,即显示P5.0~P95.0的允许范围之间。
如果不是,利用调节轮和反馈杆长度调节PS2的零点和量程。
(调节轮调整相当零点调整,反馈杆长度调整相当量程调整)6、现在移动执行器,使杆达到水平位置,显示一个介于P48.0到P52.0之间的值,如果不是这种情况,调整摩擦夹紧单元,直到杆水平显示“P50.0”。
三、直行程执行机构的自动初始化正确移动执行机构。
离开中心位置,开始初始化。
1、按下“方式键”5秒以上,进入组态方式,进入到第一参数,选择执行器类型,2、短按“方式键”切换到第二参数,根据冲程选择参数,即比率开关位置。
或3、按“方式键”进入到下一参数如果你希望在初始化阶段完成后,计算的整个冲程量用mm表示,这一步必须设置为此,你需要屏上选择与刻度杆上驱动钉设定值相同的值。
4、按“方式键”进入下一参数,然后按”增加键”超过5秒,初始化开始,初始化进行时,“RUN1”至“RUN5”一个接一个出现于显示屏下行,初始化过程依据执行机构,可持续15分钟,当显示时初始化完成。
5、短按“方式键”,出现“INITA”,再按“方式键”超过5秒退出组态方式。
松开“方式键”时,处于手动方式,再短按“方式键”进入自动方式。
注:如使用手动初始化,则RUN2由手动完成,其余各步骤均相同。
四、角行程执行机构调试准备1、用相应的安装配件安装定位器。
2、用气动管缆连接定位器与执行机构,给定位器提供气源。


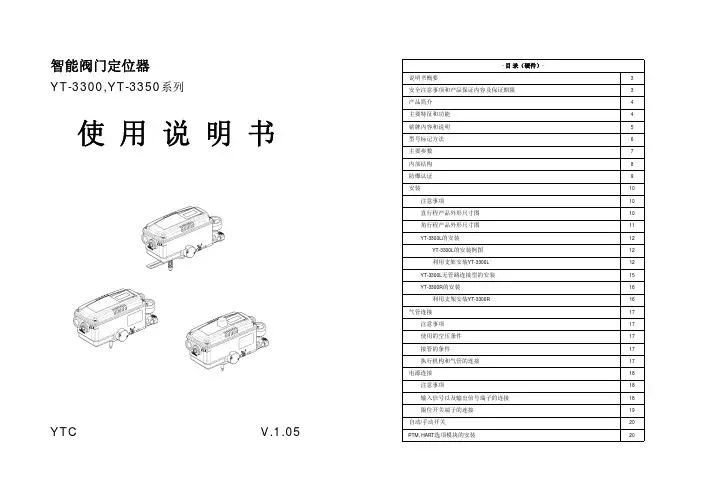
智能阀门定位器YT-3300,YT-3350系列使 用 说 明 书YTC V.1.05- 目 录(硬件)-说明书概要3安全注意事项和产品保证内容及保证期限3产品简介4主要特征和功能4铭牌内容和说明5型号标记方法6主要参数7内部结构8防爆认证9安装10注意事项10直行程产品外形尺寸图10角行程产品外形尺寸图11 YT-3300L的安装12 YT-3300L的安装例图 12利用支架安装YT-3300L12 YT-3300L无管路连接型的安装15 YT-3300R的安装16利用支架安装YT-3300R16气管连接17注意事项17使用的空压条件17接管的条件17执行机构和气管的连接17电源连接18注意事项18输入信号以及输出信号端子的连接18限位开关端子的连接19自动/手动开关20 PTM, HART选项模块的安装20- 目 录 (软件)-自动设定和基本操作方法22按钮说明22正常运行模式(RUN模式)的说明23自动设定 (AUTO CAL)23自动设定1 (AUTO 1) 24自动设定2 (AUTO 2)24自动设定HF (AUTO HF) 24手动模式(MANUAL)24参数模式 (PARAM)25死区(dEAdZONE)设定25 P 值设定(KP)25I 值设定(KI)25D 值设定(KD)25P_ 值设定(KP_)26 I_ 值设定(KI_)26 D_值设定(KD_)26 BIAS值设定26 KF值设定26手动设定模式 (HAND CAL)26手动设定模式的种类26阀门的零点和量程的设定26阀位反馈信号的零点和量程设定27按行程百分比降低阀门量程(PE TRIM)27设定反馈信号的正/反输出信号(TR_NORM/REV)28 HART通讯的正/反输出设定( HT NORM / REVS )28阀门模式(VALVE)28动作模式的变更 (ACT)28流量特性的变更 (CHAR)29用户自定义流量特性的设定 (USER SET)29正作用阀门紧密关闭功能的设定 (TSHUT OP)29反作用阀门紧密关闭功能的设定 (TSHUT CL)29分程控制 (SPLIT)30用户自定义零点信号设定(CST ZERO)30用户自定义量程信号设定(CST ENd)30角度补偿模式 (ITP OFF/ON)30查看模式(VIEW)31错误警告代码32主程序软件导航图33智 能 阀 门 定 位 器 YT-3300,YT-3350系列说明书概要感谢选用我公司产品。
阀门三位控制器说明本定位器可根据控制室的指令,控制阀门处在:关位置、中间某个位置(可任意设定)、开位置;为了方便现场调试,具有手动控制功能、模拟控制室指令进行现场调试的功能,同时具有断电自动保存最后一次指令功能。
还可对阀门设定的某个中间位置进行顺时和逆时的延时控制(出厂延时设定为3秒)。
输入、输出安排:◆电源:+24V、-GND◆电位器信号:P1、P2、P3◆输入信号:(来自控制室指令:低电平脉冲有效、GND为公共端)1、CLOSE(要求阀门关闭)2、MID(要求阀门处于中间位置)3、OPEN(要求阀门打开)(说明:系统以最后接收到的控制指令作相应动作)◆输出信号:(输出到控制室的状态信号:24V、GND为公共端)OUTC:阀门处在关闭位置OUTM:阀门处在中间位置OUTO:阀门处在打开位置◆电磁阀信号:(控制双电控电磁阀)1、关闭阀门信号(VC+、VC-)2、打开阀门信号(VO+、VO-)◆手动控制按键:(3个)1、调试按键:3个(手动控制功能/模拟控制室指令----根据SW1:ON/OFF区分功能)K_C:手动关闭阀门/ 要求阀门关闭;K_M:设置功能键/ 要求阀门处在中间位置;K_O:手动打开阀门/ 要求阀门打开;2、设置功能:K_M键(当SW1=ON时有用,用于设定关闭位置、中间位置、打开位置)操作步骤:(进入设置状态后,可通过K_C、K_O键手动调整阀门位置)a)长按K_M键,LED黄灯闪烁几下,此时,松开此按钮,系统进入设置状态;b)按K_C键使阀门处于关闭位置,短按一下K_M键,LED黄灯闪一下,进入下一设置状态;c)按K_C或K_O键使阀门处于需设定的中间位置,短按一下K_M键,LED黄灯闪一下,进入下一设置状态;d)按K_O键使阀门处于打开位置,短按一下K_M键,LED黄灯闪烁几下,设置完毕,将SW1拨到OFF位置,系统自动进入正常工作状态。
(若黄灯不断闪烁,则表示位置有重叠或电位器在盲区,需调整电位器起始位置后重新设定)◆LED灯:(3个)(根据SW1:ON/OFF 区分功能)1、LED_C(红灯):“关阀门电磁阀”线圈得电指示灯/ 阀门处在“关闭状态”指示灯2、LED_M(黄灯):设置时,设置过程状态指示灯/ 阀门处在“中间状态”指示灯3、LED_O(绿灯):“开阀门电磁阀”线圈得电指示灯/ 阀门处在“打开状态”指示灯◆跳线开关:(4位)1、SW1:ON/OFF-----手动设置功能/ (模拟)控制室指令2、SW2:ON/OFF--- --关闭阀门时延时/ 不延时(3秒)3、SW3:ON/OFF-----打开阀门时延时/ 不延时(3秒)4、SW4:ON/OFF----- 误差±3% / 误差±2%操作简要说明:1、SW1拨到ON位置,用3个按键进行先设定关闭位置、其次设定中间位置、最后打开位置的设定,确保设置准确;2、SW1拨到OFF位置,即可。
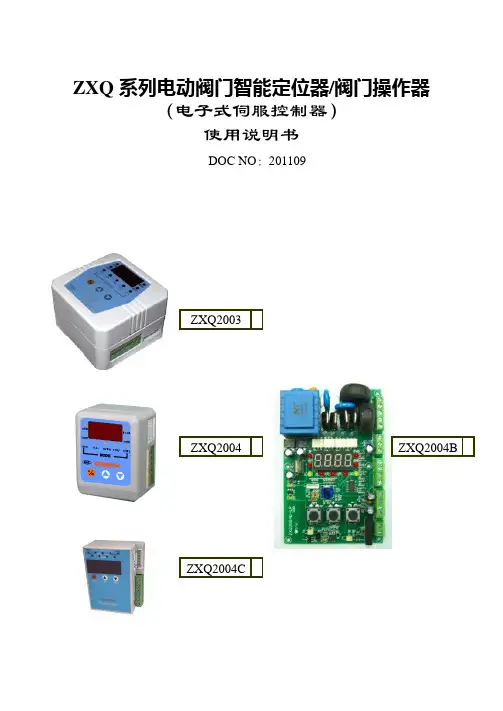
ZXQ系列电动阀门智能定位器/阀门操作器(电子式伺服控制器)使用说明书DOC NO:201109ZXQ2003ZXQ2004BZXQ2004ZXQ2004C目录一、概述 (2)二、主要技术指标 (2)三、 定位器面板....................................................3 四、 接线方式.........................................................5 五、 设定操作方法.................................................6 六、 错误代码列表 (9)附录:其它标定操作(出厂后如需此项操作,请在厂家指导下使用) (9)如顾客所购买的是本公司Z 型(机电一体)执行器,内部定位器无需对执行器转角标定,接线无误即可正常使用。
ZXQ 系列电动阀门智能定位器是以工业单片机为核心的智能信号采集控制系统,体积小巧,可选择安装在电动执行器的接线盒内或以DIN 导轨方式固定在外,能直接接收工业仪表或计算机等输出的4~20mA DC 信号(其它输入信号类型可在出厂前定制),与电位器反馈的电动执行器配套对各种阀门或装置进行精确定位操作,能对电动执行器的转角(或位移)进行自由标定,同时输出4~20mA DC 的执行器转角位置(或位移)反馈转换信号,可精确设定执行器转角位置的下限限位值和上限限位值,定位器采用3个按键操作,9个LED 灯可直接显示定位器模态,4位数码LED 通过按键切换显示阀位实际开度值、阀位设定开度值、定位器壳内温度,操作方便。
● 控制精度:0.1%~3.0%(通过U4参数可调)● 可接电动执行器反馈信号:电位器500Ω~10K Ω ● 可接收外部控制信号(DC ):4~20mA (1~5V 、0~10V 、开关量等出厂前定制) ● 输入阻抗:250Ω;● 通过修改U1参数可设定:①DRTA/正动作,RVSA/逆动作模态 ②输入信号中断时“中断”模态—OPEN(开)、STOP(停)、SHUT(闭) ● 可选:可控硅输出(AC ,1000V ,25A )● 输出执行器位置信号:低漂移输出4~20mA DC 对应执行器全闭至全开,信号完全与输入隔离(光电隔离),输出负载≤500Ω ● 环境温度:0~80℃,相对湿度:≤90%RH●有超温保护功能: 定位器壳内温度≥70℃时,定位器停止对执行器的开闭控制●外形尺寸:ZXQ2003→77mm(底面长)×76mm(底面宽)×51mm(高/厚);ZXQ2004→74 mm(底面长)×57mm(底面宽)×45mm(高/厚)ZXQ2004B→119mm(底面长)×76mm(底面宽)×26mm(高/厚)ZXQ2004C→62mm(底面长)×48mm(底面宽)×26mm(高/厚)●可通过按键自由标定输入信号所对应执行器的动作区间(一般标定为电动执行器全闭、全开位置)●可设定最大阀位限制值与最小阀位限制值●密码锁,防止误操作●防执行器频繁启动功能●带故障报警代码指示功能(E-0X)●按输入信号和执行器转角位置进行智能步距调整精确定位■■■1参照下图定位器接线端子和定位器外壳上的接线图连接好电动执行器和电源连线,注意连接时的极性,为减少电机干扰,应将电动执行器的电机控制线和反馈信号线分开走线;定位器的弱电信号线应尽量短些,若必须使用较长的连线时,应采用屏蔽信号线,外屏蔽与控制柜外壳妥善接地。

智能定位器产品手册YT-3400 / 3450系列(新的NCS型)YT-3400YT-3450接线端子形状Rotork YTC Limited目录1引言 (6)1.1一般用户信息 (6)1.2制造商保修 (6)1.3防爆警告和特定使用条件 (7)2产品说明 (8)2.1常规信息 (8)2.2主要特点和功能 (8)2.3标签说明 (9)2.4产品代号 (14)2.5产品规格 (15)2.6数字输入和数字输出规格 (16)2.7证书 (17)2.8部件和组件 (20)2.9产品尺寸 (21)2.9.1YT-3400 (21)2.9.2YT-3450 (22)3安装 (23)3.1安全 (23)3.2安装工具 (24)3.3直行程定位器安装 (24)3.4角行程定位器安装 (28)3.4.1组件 (28)3.4.2角行程支架信息 (29)3.4.3角行程定位器安装步骤 (30)4连接- 空气 (32)4.1安全 (32)4.2供给压力条件 (32)4.3管路连接 (32)4.4连接- 执行器管路 (33)4.4.1单作用执行器 (33)4.4.2双作用执行器 (33)5连接- 电源 (34)5.1安全 (34)5.2端子概览 (35)5.2.1接地 (38)6调节 (39)6.1A/M开关调节 (39)6.2可变孔口件调节 (39)7维护 (40)7.1供给压力 (40)7.2密封件 (40)8自动校准和PCB操作 (41)8.1警告 (41)8.2LCD显示器和按钮 (41)8.2.1LCD显示器和符号 (41)8.2.2按钮和功能 (42)8.3菜单层级 (43)8.4运行模式监控 (44)8.5配置和操作 (45)8.6校准(CALIb) (50)8.6.1动作类型(SINGLE / dOUBLE) (51)8.6.2自动校准1(AUTO 1) (51)8.6.3自动校准2(AUTO 2) (52)8.6.4自动校准3(AUTO 3) (53)8.6.5行程零点(TVL ZERO)和行程终点(TVL ENd) (54)8.7手动操作(MAN OPER) (55)8.7.1通过设置位置进行手动操作(MAN SP) (55)8.7.2利用MV进行手动操作(MAN MV) (55)8.8控制参数(CTL PARM) (56)8.8.1死区(dEAdbANd) (56)8.8.2向前P参数(KP UP), 向后P参数(KP dN) (57)8.8.3向前积分时间参数(TI UP), 反向积分时间参数(TI dN) (57)8.8.4向前D参数(KP UP), 向后D参数(KP dN) (58)8.8.5GAP参数(GAP) (58)8.8.6GAP P参数(GP) (58)8.8.7GAP I参数(GI) (59)8.8.8GAP D参数(Gd) (59)8.8.9自动死区模式(AUTO db) (59)8.8.10性能模式(PER STbL / NORM / FAST) (60)8.9输入配置(IN CFG) (61)8.9.1信号方向(SIG NORM / REVS) (61)8.9.2分程模式(SPLIT 4.20 / 4.12 / 12.20 / CSt) (62)8.9.3自定义分程模式零点(CST ZERO) (62)8.9.4自定义分程模式终点(CST ENd) (63)8.9.5阀门流量特性曲线(CHAR LIN / EQ / USER 5P / USER 21P) (63)8.9.6用户设置5个特性点(USER 5P) (64)8.9.7用户设置21个特性点(USER 21P) (65)8.9.8用力打开(TSHUT OP) (66)8.9.9用力关闭(TSHUT CL) (67)8.9.10目标位置上升速率(RAMP UP)和目标位置下降速率(RAMP dN) (68)8.9.11数字输入功能(dIF dIF OFF / FCL / FOP / PSTA / PSTO) (70)8.9.12数字输入逻辑(dI LOGIC HI / Lo) (70)8.10输出配置(OUT CFG) (71)8.10.1位置发送器方向(PTM NORM / REVS) (71)8.10.2位置发送器零点/终点(PTM ZERO / ENd) (72)8.10.3HART反馈方向(HT NORM / REVS) (73)8.10.4反算(bACKCAL oFF / on) (74)8.10.5限位开关模式(LS MOdE oFF/ on) (74)8.10.6数字输出功能(dO1 或dO2 OFF / ...) . (76)8.10.7数字输出控制逻辑(dO1 或dO2 LOGIC HI / Lo) (77)8.10.8模拟输出功能(AOF OFF / ...).. (78)8.10.9模拟输出逻辑(AO LOGIC Lo / HI) (79)8.11设备配置(dEV CFG) (80)8.11.1动作设置(ACT) (80)8.11.2直行程反馈杆设置模式(LEVT STd / AdT) (80)8.11.3直行程差值(ITP oFF / on) (81)8.11.4参数锁定(Write Protect,W UNLOCK / LOCK) (81)8.11.5实际位置查看模式(View Mode,VI NORM / REVS) (81)8.11.6轮询地址设置(POL AddR) (82)8.11.7出厂重置(dEFAULT oFF / on) (82)8.11.8定位器自测试(SELFTEST) (83)8.12诊断模式(dIAGNd) (84)8.12.1默认警报设置 (84)8.12.2程序状态(PS) (87)8.12.3设备状态(dS) (88)8.12.4查看监控计数(VI CNTS) (90)8.12.5诊断限值配置(LIMT CFG) (91)8.12.6重置警报状态(RST ALRM OFF / on) (92)8.12.7查看事件日志(EVT LOG) (93)8.12.8局部行程测试记录(查看PST结果记录,PST RSLT) (94)8.12.9PST配置(PST CFG) (95)8.12.10运行PST(PST NOW) (96)8.12.11定期PST测试(PST计划,PST SCHd oFF / on) (96)8.13位置信息(INFO) (97)8.14自动校准过程中显示的错误代码 (99)8.15状态和警报代号 (100)9主要软件地图 (103)1 引言1.1 一般用户信息感谢您购买Rotork YTC Limited产品。
智能阀门定位器YT-3400系列使 用 说 明 书YTC V.1.04- 目 录(硬件)-说明书概要3安全注意事项和产品保证内容及保证期限3危险区域使用时注意事项3产品简介4主要特征和功能4铭牌内容和说明5型号标记方法6主要参数7内部结构8安装9注意事项9 YT-3400L 外形尺寸图9 YT-3400R 外形尺寸图10排水接头的位置调整10 YT-3400L的安装11 YT-3400L的安装例图 11利用支架安装YT-3400L11 YT-3400R的安装15 YT-3400R的安装例图15利用支架安装YT-3400R15气管连接18注意事项18使用的空压条件18接管的条件19执行机构和YT-3400气管的连接19单作用执行机构和气管的连接19双作用执行机构和气管的连接19电源连接20注意事项20电流输入信号端子的连接21反馈信号端子的连接21限位开关端子的连接22接地端子的连接22自动/手动开关23流量调节旋钮的使用方法23- 目 录 (软件)-自动设定和基本操作方法24按钮说明24正常运行模式(RUN模式)的说明25自动设定 (AUTO CAL)25自动设定1 (AUTO 1) 26自动设定2 (AUTO 2)26自动设定3 (AUTO 3) 26自动设定HF(AUTO HF)26 BIAS设定26 V_0设定26手动模式(MANUAL)27参数模式 (PARAM)27参数种类27死区(dEAdZONE)设定28 P 值设定(KP)28I 值设定(KI)29D 值设定(KD)29P_ 值设定(KP_)30 I_ 值设定(KI_)30 D_ 值设定(KD_)30 HF启动(HF Off / On)30手动设定模式 (HAND CAL)31手动设定模式的种类31阀门的零点和量程的设定31阀位输出信号的零点和量程设定32按行程百分比降低阀门量程(PE TRIM)33设定反馈信号的正/反输出信号(TR_NORM/REV)33 HART通讯的正/反输出设定(HT NORM / REVS)33阀门模式(VALVE)34动作方式的变更 (ACT)34流量特性的变更 (CHAR)34用户自定义流量特性的设定 (USER SET)35正作用阀门紧密关闭功能的设定 (TSHUT OP)35反作用阀门紧密关闭功能的设定 (TSHUT CL)36分程控制 (SPLIT)36用户自定义零点信号大小设定(CTS ZERO)37用户自定义量程信号设定(CTS END)37角度补偿模式(ITP OFF / ON)37查看模式(VIEW)38错误警告代码39主程序软件导航图40智 能 阀 门 定 位 器 YT-3400系列说明书概要感谢选用我公司产品。
智能阀门定位器YT-3300,YT-3350系列使 用 说 明 书YTC V.1.05- 目 录(硬件)-说明书概要3安全注意事项和产品保证内容及保证期限3产品简介4主要特征和功能4铭牌内容和说明5型号标记方法6主要参数7内部结构8防爆认证9安装10注意事项10直行程产品外形尺寸图10角行程产品外形尺寸图11 YT-3300L的安装12 YT-3300L的安装例图 12利用支架安装YT-3300L12 YT-3300L无管路连接型的安装15 YT-3300R的安装16利用支架安装YT-3300R16气管连接17注意事项17使用的空压条件17接管的条件17执行机构和气管的连接17电源连接18注意事项18输入信号以及输出信号端子的连接18限位开关端子的连接19自动/手动开关20 PTM, HART选项模块的安装20- 目 录 (软件)-自动设定和基本操作方法22按钮说明22正常运行模式(RUN模式)的说明23自动设定 (AUTO CAL)23自动设定1 (AUTO 1) 24自动设定2 (AUTO 2)24自动设定HF (AUTO HF) 24手动模式(MANUAL)24参数模式 (PARAM)25死区(dEAdZONE)设定25 P 值设定(KP)25I 值设定(KI)25D 值设定(KD)25P_ 值设定(KP_)26 I_ 值设定(KI_)26 D_值设定(KD_)26 BIAS值设定26 KF值设定26手动设定模式 (HAND CAL)26手动设定模式的种类26阀门的零点和量程的设定26阀位反馈信号的零点和量程设定27按行程百分比降低阀门量程(PE TRIM)27设定反馈信号的正/反输出信号(TR_NORM/REV)28 HART通讯的正/反输出设定( HT NORM / REVS )28阀门模式(VALVE)28动作模式的变更 (ACT)28流量特性的变更 (CHAR)29用户自定义流量特性的设定 (USER SET)29正作用阀门紧密关闭功能的设定 (TSHUT OP)29反作用阀门紧密关闭功能的设定 (TSHUT CL)29分程控制 (SPLIT)30用户自定义零点信号设定(CST ZERO)30用户自定义量程信号设定(CST ENd)30角度补偿模式 (ITP OFF/ON)30查看模式(VIEW)31错误警告代码32主程序软件导航图33智 能 阀 门 定 位 器 YT-3300,YT-3350系列说明书概要感谢选用我公司产品。
智能阀门定位器YT-3400系列使 用 说 明 书YTC V.1.04- 目 录(硬件)-说明书概要3安全注意事项和产品保证内容及保证期限3危险区域使用时注意事项3产品简介4主要特征和功能4铭牌内容和说明5型号标记方法6主要参数7内部结构8安装9注意事项9 YT-3400L 外形尺寸图9 YT-3400R 外形尺寸图10排水接头的位置调整10 YT-3400L的安装11 YT-3400L的安装例图 11利用支架安装YT-3400L11 YT-3400R的安装15 YT-3400R的安装例图15利用支架安装YT-3400R15气管连接18注意事项18使用的空压条件18接管的条件19执行机构和YT-3400气管的连接19单作用执行机构和气管的连接19双作用执行机构和气管的连接19电源连接20注意事项20电流输入信号端子的连接21反馈信号端子的连接21限位开关端子的连接22接地端子的连接22自动/手动开关23流量调节旋钮的使用方法23- 目 录 (软件)-自动设定和基本操作方法24按钮说明24正常运行模式(RUN模式)的说明25自动设定 (AUTO CAL)25自动设定1 (AUTO 1) 26自动设定2 (AUTO 2)26自动设定3 (AUTO 3) 26自动设定HF(AUTO HF)26 BIAS设定26 V_0设定26手动模式(MANUAL)27参数模式 (PARAM)27参数种类27死区(dEAdZONE)设定28 P 值设定(KP)28I 值设定(KI)29D 值设定(KD)29P_ 值设定(KP_)30 I_ 值设定(KI_)30 D_ 值设定(KD_)30 HF启动(HF Off / On)30手动设定模式 (HAND CAL)31手动设定模式的种类31阀门的零点和量程的设定31阀位输出信号的零点和量程设定32按行程百分比降低阀门量程(PE TRIM)33设定反馈信号的正/反输出信号(TR_NORM/REV)33 HART通讯的正/反输出设定(HT NORM / REVS)33阀门模式(VALVE)34动作方式的变更 (ACT)34流量特性的变更 (CHAR)34用户自定义流量特性的设定 (USER SET)35正作用阀门紧密关闭功能的设定 (TSHUT OP)35反作用阀门紧密关闭功能的设定 (TSHUT CL)36分程控制 (SPLIT)36用户自定义零点信号大小设定(CTS ZERO)37用户自定义量程信号设定(CTS END)37角度补偿模式(ITP OFF / ON)37查看模式(VIEW)38错误警告代码39主程序软件导航图40智 能 阀 门 定 位 器 YT-3400系列说明书概要感谢选用我公司产品。
智能阀门定位器YT-3300,YT-3350系列使 用 说 明 书YTC V.1.05- 目 录(硬件)-说明书概要3安全注意事项和产品保证内容及保证期限3产品简介4主要特征和功能4铭牌内容和说明5型号标记方法6主要参数7内部结构8防爆认证9安装10注意事项10直行程产品外形尺寸图10角行程产品外形尺寸图11 YT-3300L的安装12 YT-3300L的安装例图 12利用支架安装YT-3300L12 YT-3300L无管路连接型的安装15 YT-3300R的安装16利用支架安装YT-3300R16气管连接17注意事项17使用的空压条件17接管的条件17执行机构和气管的连接17电源连接18注意事项18输入信号以及输出信号端子的连接18限位开关端子的连接19自动/手动开关20 PTM, HART选项模块的安装20- 目 录 (软件)-自动设定和基本操作方法22按钮说明22正常运行模式(RUN模式)的说明23自动设定 (AUTO CAL)23自动设定1 (AUTO 1) 24自动设定2 (AUTO 2)24自动设定HF (AUTO HF) 24手动模式(MANUAL)24参数模式 (PARAM)25死区(dEAdZONE)设定25 P 值设定(KP)25I 值设定(KI)25D 值设定(KD)25P_ 值设定(KP_)26 I_ 值设定(KI_)26 D_值设定(KD_)26 BIAS值设定26 KF值设定26手动设定模式 (HAND CAL)26手动设定模式的种类26阀门的零点和量程的设定26阀位反馈信号的零点和量程设定27按行程百分比降低阀门量程(PE TRIM)27设定反馈信号的正/反输出信号(TR_NORM/REV)28 HART通讯的正/反输出设定( HT NORM / REVS )28阀门模式(VALVE)28动作模式的变更 (ACT)28流量特性的变更 (CHAR)29用户自定义流量特性的设定 (USER SET)29正作用阀门紧密关闭功能的设定 (TSHUT OP)29反作用阀门紧密关闭功能的设定 (TSHUT CL)29分程控制 (SPLIT)30用户自定义零点信号设定(CST ZERO)30用户自定义量程信号设定(CST ENd)30角度补偿模式 (ITP OFF/ON)30查看模式(VIEW)31错误警告代码32主程序软件导航图33智 能 阀 门 定 位 器 YT-3300,YT-3350系列说明书概要感谢选用我公司产品。