船舶操纵系统图解
- 格式:pdf
- 大小:1.40 MB
- 文档页数:18
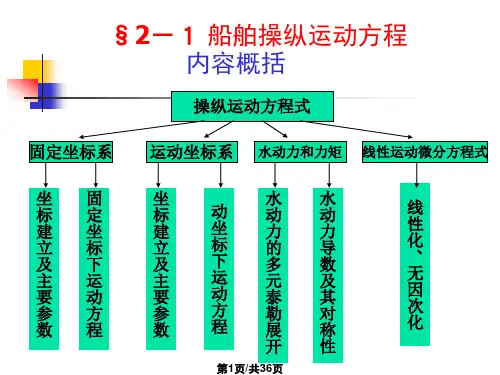
4.4 船舶操纵控制船舶操纵是指船舶驾驶员根据船舶操纵性能和风、浪、流等客观条件,按照有关法规要求,正确运用操纵设备,使船舶按照驾驶员的意图保持或改变船舶水平运动状态的操作。
下面介绍现代船舶航向控制和船舶主机遥控操纵。
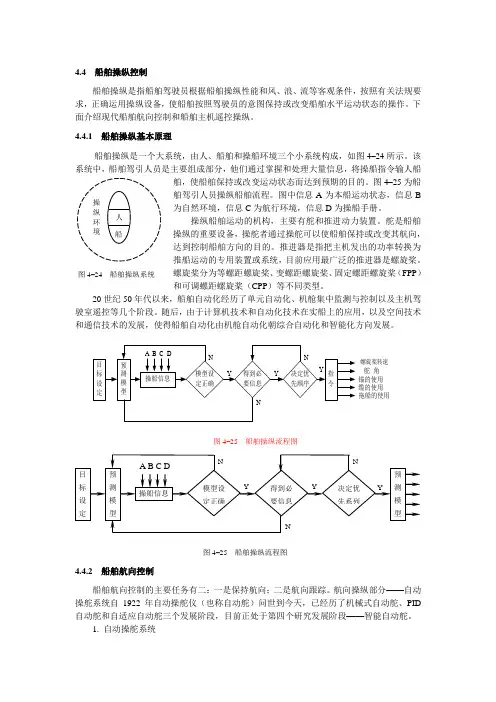
4.4.1 船舶操纵基本原理船舶操纵是一个大系统,由人、船舶和操船环境三个小系统构成,如图4–24所示。
该系统中,船舶驾引人员是主要组成部分,他们通过掌握和处理大量信息,将操船指令输人船舶,使船舶保持或改变运动状态而达到预期的目的。
图4–25为船舶驾引人员操纵船舶流程。
图中信息A 为本船运动状态,信息B为自然环境,信息C 为航行环境,信息D 为操船手册。
操纵船舶运动的机构,主要有舵和推进动力装置。
舵是船舶操纵的重要设备,操舵者通过操舵可以使船舶保持或改变其航向,达到控制船舶方向的目的。
推进器是指把主机发出的功率转换为推船运动的专用装置或系统,目前应用最广泛的推进器是螺旋桨。
螺旋桨分为等螺距螺旋桨、变螺距螺旋桨、固定螺距螺旋桨(FPP )和可调螺距螺旋桨(CPP )等不同类型。
20世纪50年代以来,船舶自动化经历了单元自动化、机舱集中监测与控制以及主机驾驶室遥控等几个阶段。
随后,由于计算机技术和自动化技术在实船上的应用,以及空间技术和通信技术的发展,使得船舶自动化由机舱自动化朝综合自动化和智能化方向发展。
螺旋桨转速舵 角锚的使用缆的使用拖船的使用图4–25 船舶操纵流程图4.4.2 船舶航向控制船舶航向控制的主要任务有二:一是保持航向;二是航向跟踪。
航向操纵部分——自动操舵系统自1922年自动操舵仪(也称自动舵)问世到今天,已经历了机械式自动舵、PID 自动舵和自适应自动舵三个发展阶段,目前正处于第四个研究发展阶段——智能自动舵。
1. 自动操舵系统1) 常规PID 自动舵在航海自动化系统中,船舶是系统的调节对象,若略去动力装置的影响,船舶运动状态的调节,将由舵来实现,并从船首方向表现出来。

第二章船舶操作基本知识船舶操纵是指船舶驾驶人员根据船舶操纵性能和客观环境因素,正确地控制船舶以保持或改变船舶的运动状态,以达到船舶运行安全的目的。
船舶操纵是通过车、舵并借助锚、缆和拖船来实现的。
要完成操纵任务,除保证所有操纵设备处于正常良好的技术状态外,操纵人员必须掌握船舶操纵性能(惯性和旋回性等)及对客观环境(风、流、水域的范围等)的正确估计。
第一节车的作用推动船舶向前运动的工具叫船舶推进器,推进器的种类很多,目前常见的有明轮、喷水器推进器螺旋桨、平旋推进器、侧推器等。
因为螺旋桨结构简单、性能可靠且推进效率高,所以被广泛应用于海上运输船舶。
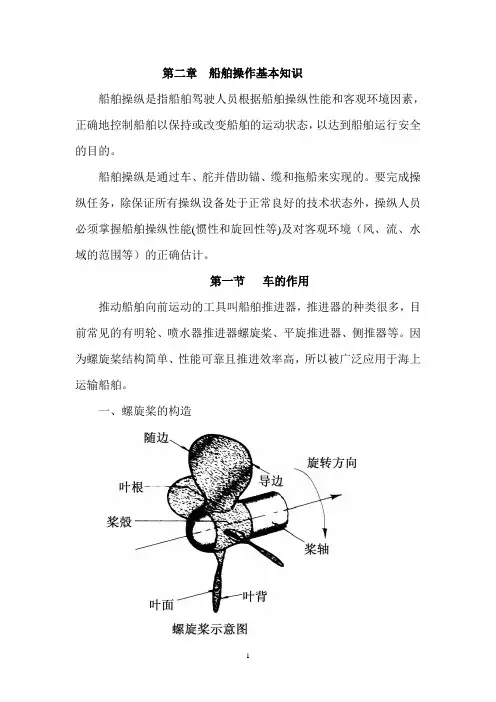
一、螺旋桨的构造1、螺旋桨的材料和组成螺旋桨常用铸锰黄铜、青铜和不锈钢制作。
现在也有采用玻璃制作的。
螺旋桨有桨叶和浆毂两部分组成,连接尾轴上。
(1)桨叶,一般为三片和四片,个别也有五片甚至六片的,低速船采用宽叶,高速船采用窄叶。
(2)桨毂,多数浆毂与桨叶铸成一体。
浆毂中心又圆锥形空,用以套在尾轴后部。
(3)整流帽(4)尾轴2、螺旋桨的配置一般海船都采用单螺旋桨,叫单车船。
也有部分船舶(客船和军舰)采用双螺旋桨,叫双车船。
单桨船的螺旋桨通常是右旋转式的。
右旋是指船舶在前进时,从船尾向船首看,螺旋桨在顺车时沿顺时针方向转动的称为右旋,沿逆时针方向转动的称为左旋。
目前,大多数商船均采用右旋式。
双桨船的螺旋桨按其旋转方向可分为外旋式和内旋式两,对于双桨船,往舷外方向转动的称为外旋,反之称内旋。
通常采用外旋,以防止水上浮物卷入而卡住桨叶。
进车时,左舷螺旋桨左转,右舷螺旋桨右转,则称为外旋式;反之,称为内旋式。
二、推力、阻力和功率1、船舶推力在主机驱动下,螺旋桨正车旋转时推水向后运动,水对螺旋桨的反作用力在船首方向的分量就是推船前进的推力,倒车时则产生指向船尾的拉力。
流向螺旋桨盘面的水流称为吸入流(suction current);离开螺旋桨盘面的水流称为排出流(discharge current)。


一:锚泊操纵不同的锚泊方式适用于不同的水域和条件,各有自身的优点及缺点。
锚泊方式一般分为四种,如图4—34所示。
图4—34锚泊方式1.单锚泊(riding at single anchor)船舶抛一只锚进行锚泊的方式称为单锚泊,是应用最为普遍的锚泊方式。
大风浪中为抑制船舶偏荡运动,也将另一锚抛出,呈短链拖动状态;但由于该锚并不在系留方面起主要作用,仅仅是一个止荡锚,因此,仍将该锚泊方式列在单锚泊方式中。
单锚泊方式,作业容易,抛起锚方便,适用水域较广;不足之处是偏荡严重,总的来看锚泊力较弱。
2.八字锚泊(open mooring)船舶先后抛出左右二锚,使双链保持一定夹角(一般为60°左右)的锚泊方式称为八字锚泊。
港内锚泊水域受限时,单锚泊不足以抵御风力时均可采用此种锚泊方式。
八字锚泊方式,锚泊力和抑制偏荡的作用随二链交角不同而不同;若以60°夹角的八字锚泊论,较单锚泊在上述两方面均有明显的增强。
其缺点是作业较为复杂,当风流方向多次改变后锚链常出现绞缠。
3.一字锚泊(f1ying moor或ordinary moor)狭窄水域内,船舶沿水域纵长方向(一般沿流向)先后抛出二锚,使双链交角保持在近于180°的锚泊方式称为一字锚泊。
多用于狭水道或内陆江河。
在风流影响下,受外力作用较大的锚称为力锚(riding anchor);另一锚则称为惰锚(1ee anchor)。
锚链相应地称之为力链和惰链。
通常力链长度为4节,惰链长度为3节。
一字锚泊方式具有最大程度地限制锚泊船运动范围的优点;但作业也较为复杂,风流方向变化后缠链也较频繁。
该法适用于回旋余地较窄的江河中或港内锚泊。
4.平行锚泊(riding to both anchors)船舶同时抛下左右二锚,使双链等长并保持平行,即夹角为零的锚泊方式称为平行锚泊,也称为一点锚。
该锚泊方式可抵御强烈的风浪,也可在江河中抵御湍急的水流,是可以最大程度地发挥双锚锚泊力的一种锚泊方式。
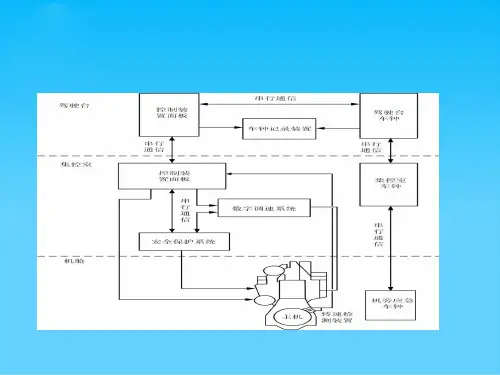
船舶操纵系统第一节 操纵系统概述为了满足船舶在各种工况下的航行需要,将船舶主机的起动、换向和调速等各装置联结成一个统一整体,并可集中控制的所有机构、设备和管路,总称为柴油机推进装置的操纵系统。
小型柴油机的推进装置,其起动、调速及换向系统的控制件距离近,通常分别设置,各自操纵。
近年来不少船舶也通过机械、气动等型式传输集中至机舱集控台或驾驶室,对推进装置集中操纵。
大、中型柴油机为操纵方便和工作可靠,都将各控制部分通过各种方式有机地联系以便集中控制和远程控制。
随着自动化技术和电子技术的发展,各种遥控技术已广泛地应用于柴油机的操纵机构。
特别是近年来电子计算机技术和微处理机已用于主机遥控、巡回检测和工况监视等方面,不仅大大减轻了轮机人员的劳动强度,改善了工作条件,还可以避免人为的操作差错,提高船舶运行的安全性、操纵性和经济性。
目前,主机遥控技术水平越来越高,船舶正朝着全面自动化和智能化的方向发展。
一、对操纵系统的要求在船舶柴油机中,操纵部分是最复杂的一部分,其部件多、零件杂、相互牵连制约,近代自动化技术和遥控技术在操纵系统的应用,更增加了操纵系统的复杂程度。
为了保证操纵系统能够可靠地工作,对船舶柴油机的操纵系统有下列基本要求:(1)必须能迅速而准确地执行起动、换向、变速和超速保护等动作,并能满足船舶规范上相应的要求。
(2)具有必要的连锁装置,以避免操作差错而造成事故。
起动连锁装置:盘车机未脱开不能起动,换向未到位不能起动。
换向连锁装置:转向与要求不符时不能起动,不允许在较高转速下换向,运转过程中不能自行换向。
滑油保安连锁装置:当滑油压力下降至许用下限值时,将油量调节杆推至零油位,使柴油机自行熄火停车。
(3)必须设有必要的监视仪表和安全保护、报警装置。
在操纵台(或遥控操纵台)上有转速、转向、气压、油压、水温等醒目的仪表,并对直接影响安全运行的有关压力和温度等置有报警装置和安全保护装置。
(4)操纵机构中的零部件必须灵活、可靠、不易损坏。