线性系统的根轨迹法
- 格式:doc
- 大小:215.50 KB
- 文档页数:12
线性系统的根轨迹法实验报告实验二线性系统的根轨迹法一,实验目的1,掌握matlab绘制根轨迹的方法。
2,观察k值变化对系统稳定性的影响。
3,掌握系统临界稳定情况下k值得求取。
4,了解增设零点对系统稳定的影响以及改善系统稳定性的方法。
二,实验原理根轨迹的概念:所谓根轨迹就是当开环系统某一参数从零变到无穷大时,闭环系统特征方程式的根在s平面上变化的轨迹。
根轨迹与系统性能:有了根轨迹就可以分析系统的各种性能了,稳定性的判定,当开环增益从零变到无穷大时,根轨迹不会越过虚轴进入s平面的右半平面,此时K的范围为系统稳定的范围,根轨迹与虚轴的交点处的K值,为系统的临界开环增益,开根轨迹进入s平面的右半平面时所对应的K值为系统不稳定的情况。
三,实验内容A、设单位负反馈系统的开环传递函数为G(s)=K/(s*(s+1)(s+5)) (1) 绘制系统的根轨迹,并将手工绘制结果与实验绘制结果比较; (2) 从实验结果上观察系统稳定的K 值范围;(3) 用simulink 环境观察系统临界稳定时的单位阶跃响应分析:绘制根轨迹的matlab文本为clfnum=1;den=conv([1 1 0],[1 5]); rlocus(num,den) %绘制系统根轨迹1,得到如图的根轨迹图:2,用鼠标点击根轨迹与虚轴处的交点可得到临界稳定的开环增益K=30,所以系统稳定的K值范围为0―30。
3,在simulink环境下按下图连接电路:取增益为30的时候在示波器下观察单位节约响应,输出波形为:由图可以看出单位阶跃响应的输出为等幅的震荡输出,所以此时系统为临界稳定状态。
当改变开环增益为50和20时观察示波器,得到输出波形分别为:由图可知当增益K为50时输出为不稳定的震荡输出,此时系统不稳定,当增益K为20时输出的波形震荡越来越缓慢,最后趋于稳定,所以此时的系统是稳定的。
B,设单位反馈控制系统的开环传递函数为G(S)=K(s+3)/s(s+1)(s+2)(1) 仿照上题绘制系统的根轨迹,并判断系统的稳定性; 参照第一题得到matlab命令文本为:clfnum=1;den=conv([1 1 0],[1 2]); rlocus(num,den) %绘制系统根轨迹得到如图的根轨迹图:1,由图可知根轨迹没有进入s平面右半平面,所以系统在K=0到K=?都是稳定的。
《模块化自控原理》线性系统的根轨迹分析实验模块化自控原理中的线性系统的根轨迹分析实验是探究线性系统的稳定性和动态特性的一种常用方法,通过实验观测和分析系统的根轨迹,可以得到系统的传递函数以及系统的稳定性等重要信息。
下面是对该实验的详细说明和分析。
1.实验目的1.1理解线性系统的根轨迹概念及其重要性;1.2学习使用根轨迹法进行系统的稳定性和动态特性分析;1.3掌握根轨迹分析实验的具体步骤;1.4提高实验操作和数据处理的能力。
2.实验原理2.1根轨迹的概念根轨迹是以参数变化为基础的线性系统稳定性和动态特性的分析方法之一、根轨迹是指在参数变化的范围内,系统传递函数极点的轨迹,可以用来判断系统的稳定性、响应特性和动态响应快慢等重要指标。
2.2根轨迹的画法根轨迹的画法需要先确定系统的开环传递函数,然后通过对传递函数进行拆项和配平,求解极点的位置。
根轨迹的位置可以通过极点的实部和虚部来表示,根据虚轴对称性和极点与零点的关系,可以画出根轨迹的大致形状和方向。
2.3根轨迹分析的应用根据根轨迹的形状、分布和方向可以判断系统的稳定性和动态特性:-根轨迹在左半平面则系统稳定;-根轨迹与虚轴交点奇数个则系统不稳定;-根轨迹的分布越往左上角或右上角,系统的动态特性越好。
3.实验装置和器材3.1实验装置数字控制系统实验台、计算机、示波器、信号发生器、数模转换器等。
3.2实验器材电脑、电源线、连接线、示波器探头等。
4.实验步骤4.1连接实验装置将数字控制系统实验台与计算机、示波器、信号发生器和数模转换器等设备进行连接。
4.2系统参数调整设置合适的实验参数,包括采样频率、控制周期、信号幅值等。
4.3系统根轨迹绘制在计算机上运行相应的根轨迹绘制软件,根据实验所给的开环传递函数和稳定域范围,绘制系统的根轨迹。
4.4根轨迹分析根据根轨迹的形状、位置和分布等信息,分析系统的稳定性和动态特性,并给出相应的结论和解释。
4.5记录实验数据记录实验中所绘制的根轨迹和分析结果,包括根轨迹的形状、交点、分布等重要特征。
第四章线性系统的根轨迹法一、教学目的与要求:本章讲述用闭环系统的特征根随系统参数变化的轨迹,来分析控制系统的特性,因此要求学生要掌握根轨迹作图方法的规则,并熟练运用这些规则绘制控制系统的根轨迹图。
要让学生会利用根轨迹图分析系统的稳定性、动态特性、稳态特性。
掌握怎样改善系统性能的方法。
着重讨论根轨迹图的绘制,明确闭环传递函数极点与瞬态响应的关系,了解改变开环增益,增加开环传递函数零、极点对系统质量的影响。
二、授课主要内容:1.根轨迹法的基本概念1)闭环零、极点与开环零、极点之间的关系2)根轨迹方程2.根轨迹绘制的基本法则3.广义根轨迹1)参数根轨迹2)零度根轨迹4.系统性能的分析(详细内容见讲稿)三、重点、难点及对学生的要求(掌握、熟悉、了解、自学)(1)重点掌握的内容1)熟练运用常规根轨迹的绘制法则。
2)熟练运用零度根轨迹的绘制法则。
3)正确理解单输入-单输出系统闭环零、极点和开环零极点与常规根轨迹的关系。
(2)一般掌握的内容1)根轨迹上估计控制系统的性能。
2)广义根轨迹的概念。
3)偶极子、可略零极点的概念,主导极点的概念。
(3)一般了解的内容:根轨迹法则的证明推导过程。
四、主要外语词汇根轨迹 root-locus特征方程 characteristic equation分离点 breakaway point闭环极点 closed-loop poles幅角条件 angle condition模值条件 magnitude condition实轴 real axis虚轴 imaginary axis五、辅助教学情况(见课件)六、复习思考题1.什么是根轨迹? 它有什么主要性质?如何把握根轨迹作图?2.利用图解法绘制根轨迹的8个规则是什么?3.在根轨迹作图中,确定渐近线和分离点附近的根轨迹很关键,如何理解有关它们的计算公式?4.如何绘制零度根轨迹?5.如何绘制参数根轨迹?6.控制系统的质量指标在根平面上该怎样表示?7.什么是闭环主导极点?为什么可以用主导极点来估算闭环系统的质量?8.闭环极点为实根时响应曲线的形状如何?有共轭复根时响应曲线的形状如何?9.开环零、极点的变化对控制系统的质量有什么影响?10.增加系统的开环零点(开环极点)对系统的性能有何影响?七、参考教材(资料)1.《现代控制工程》绪方胜彦著(卢伯英佟明安罗维铭译)科学出版社参考该书第四章有关内容。
2.《自动控制原理》天津大学李光泉主编机械工业出版社参考该书第四章有关内容。
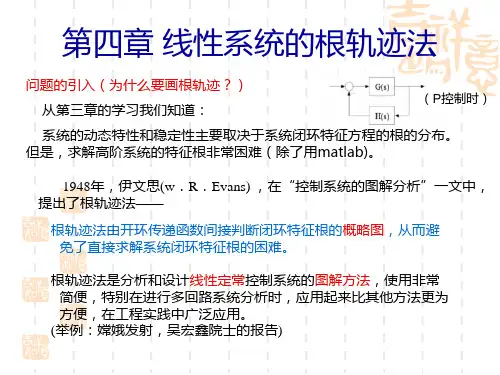
八、讲稿第四章线性系统的根轨迹法根轨迹法的基本概念根轨迹法是分析和设计线性定常控制系统的图解方法,使用十分简便,特别在进行多回路系统的分析时,应用根轨迹法比用其它方法更为方便,因此在工程实践中获得了广泛应用。
本节主要介绍根轨迹的基本概念,根轨迹与系统性能之间的关系,并从闭环零、极点与开环零、极点之间的关系推导出根轨迹方程,然后将向量形式的根轨迹方程转化为常用的相角条件和模值条件形式,最后应用这些条件绘制简单系统的根轨迹。
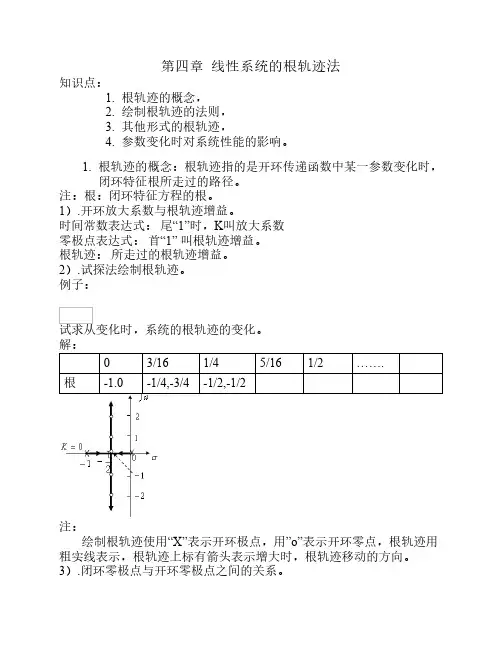
1,根轨迹概念根轨迹简称根迹,它是开环系统某一参数从零变到无穷时,闭环系统特征方程式在s平面上变化的轨迹。
当闭环系统没有零点与极点相消时,闭环特征方程式的根就是闭环传递函数的极点,我们常简称为闭环极点。
因此,从已知的开环零、极点位置及某一变化的参数来求取闭环极点的分布,实际上就是解决闭环特征方程式的求根问题。
当特征方程的阶数高于四阶时,求根过程是比较复杂的。
如果要研究系统参数变化对闭环特征方程式根的影响,就需要进行大量的反复计算,同时还不能直观看出影响趋势。
因此对于高阶系统的求根问题来说,解析法就显得很不方便。
1948年,W.R.伊文思在“控制系统的图解分析”一文中提出了根轨迹法。
当开环增益或其它参数改变时,其全部数值对应的闭环极点均可在根轨迹图上简便地确定。
因为系统的稳定性由系统闭环极点惟一确定,而系统的稳态性能和动态性能又与闭环零、极点在5平面上的位置密切相关,所以根轨迹图不仅可以直接给出闭环系统时间响应的全部信息,而且可以指明开环零、极点应该怎样变化才能满足给定的闭环系统的性能指标要求。
除此而外,用根轨迹法求解高阶代数方程的根,比用其它近似求根法简便。
为了具体说明根轨迹的概念,设控制系统如图4-1所示,其闭环传递函数为: =)(s φK s s K s R s C 222)()(2++= 于是特征方程式可写为 s 0222=++k s ,显然,特征方程式的根是:s k 2111-+-= s k 2112---=如果令开环增益K 从零变到无穷,可以用解析的方法求出闭环极点的全部数值,将这些数值标注在s 平面上,并连成光滑的粗实线,如图4-2所示。
图上,粗实线就称为系统的根轨迹,根轨迹箭头表示随着K 值的增加,根轨迹的变化趋势,而标注的数值则代表与闭环极点位置相应的开环增益K 的数值。
的根轨迹,根轨迹上的箭头表示随着K 值的增加,根轨逝的变化趋势,而标注的数值则代表与闭环极点位置相应开环增益K 的数值.2.根轨迹与系统性能有了根轨迹图,可以立即分析系统的各种性能。
下面以图4—2为例进行说明:(1)稳定性当开环增益从零变到无穷时,图4—2上的根轨迹不会越过虚轴进入右半‘平面,因此图4—1系统对所有的K 值都是稳定的,这与我们在第3—4节所得出的结论完全相同。
如果分析高阶系统的根轨迹图,那么根轨迹有可能越过虚轴进入右半辈子s 平面,此时根轨迹与虚轴交点处的K 值,就是临界开环增益。
(2)稳态性能。
由图4-2可见,开环系统在坐标原点有一个极点,所以系统属I 型系统,因而根轨迹上的K 值就是静态速度误差系数。
如果给定系统的稳态误差要求,则由根轨迹图可以确定闭环极点位置的容许范围。
在一般情况下,根轨迹图上标注出来的参数不是开环增益,而是所谓根轨迹增益。
下面将要指出,开环增益和根轨迹增益之间,仅相差一个比例常数,很容易进行换算。
对于其它参数变化的根轨迹图,情况是类似的。
(3)动态性能由图4—2可见,当0<K<0.5时,所有闭环极点位于实轴上,系统为过阻尼系统,单位阶跃响应为非周期过程;当K :o .5时,闭环两个实数极点重合,系统为临界阻尼系统,单位阶跃响应仍为非周期过程,但响应速度较0<K<0.5情况为快;当K>o .5时,闭环极点为复数极点,系统为欠阻尼系统,单位阶跃响应为阻尼振荡过程,且超调量将随X 值的增大而加大,但调节时间的变化不会显著。
上述分析表明,根轨迹与系统性能之间有着比较密切的联系。
然而,对于高阶系统,用解析的方法绘制系统的根轨迹图,显然是不适用的。
我们希望能有简便的图解方法,可以根据已知的开环传递函数迅速绘出闭环系统的根轨迹。
为此,需要研究闭环零、极点与开环零、极点之间的关系。
3.闭环零、极点与开环零、极点之间的关系由于开环零、极点是已知的,因此建立开环零、极点与闭环零、极点之间的关系,有助于闭环系统根轨迹的绘制。
并由此导出根轨迹方程。
设控制系统如图4-3所示,其闭环传递函数为φ(s)=)()(1)(s H s G s G +,在一般情况下,前向通路传递函数G (s )和反馈通路传递函数H (s )可分别表示为。
)...12)(1()...12)(1()(222221212221++++++=s T s T s T s s s s K s G G ζτζττν )()(11*i qi i fi G p s z s K -∏-∏=== 式中,G K 为前向通路增益;*G K 为前向通路根轨迹增益,它们之间满足如下关系:......221221*T T K K GG ττ=以及 )()()(11*j h j j l j H ps z s K s H --=∏∏== 式中*H K 为反馈通路根轨迹增益。
于是,图4-3系统的开环传递函数可表示为)()()()()()(1111*j hj iq i j lj i f i p s p s z s z s K s H s G ----=∏∏∏∏==== 式中,***HG K K K =,称为开环系统根轨迹增益,它与开环增益K 之间的关系类似于式(4-3),仅相差一个比例常数。
对于有m 个开环零点和n 个开环极点的系统,必有f+l=m 和q+h=n 。
将式(4-2)和(4-5)代入(4-1),得)()()()()(1*111*j mj in i j h j i f i G z s K p s p s z s Ks -+---=Φ∏∏∏∏==== 比较式(4—5)和(4—6),可得以下结论:1)闭环系统根轨迹增益,等于开环系统前向通路根轨迹增益。
对于单位反馈系统,闭环系统根轨迹增益就等于开环系统根轨迹增益。
2)闭环零点由开环前向通路传递函数的零点和反馈通路传递函数—的极点所组成。
对于单位反馈系统,闭环零点就是开环零点。
3)闭环极点与开环零点、开环极点以及根轨迹增益*K 均有关. 根轨迹法的基本任务在于:如何由已知的开环零、极点的分布及根轨迹增益,通过图解的方法找出闭环极点。
一旦确定闭环极点后,闭环传递函数的形式便不难确定,因为闭环零点可由式(4—6)直接得到。
在已知闭环传递函数的情况下,闭环系统的时间响应可利用拉氏反变换的方法求出。
4.根轨迹方程根轨迹是系统所有闭环极点的集合。
为了用图解法确定所有闭环极点,令闭环传递函数表达式(4—1)的分母为零,得闭环系统特征方程0)()(1=+s H s G由式(4-6)可见,当系统有m 个开环零点和n 个开环极点时,式(4-7)等价为1)()(11*-=--∏∏==ini j m j p s z s K 式中,z j 为已知的开环零点;p i 为已知的开环极点;*K 从零变到无穷。
我们把式(4—8) 称为根轨迹方程。
根据式(4—8),可以画出*K 当从零变到无穷时,系统的连续根轨迹。
应当指出,只要闭环特征方程可以化成式(4—8)形式,都可以绘制根轨迹,其中处于变动地位的实参数,不限定是根轨迹增益*K ,也可以是系统其它变化参数。
但是,用式(4—8)形式表达的开环零点和开环极点,在s 平面上的位置必须是确定的,否则无法绘制根轨迹。
此外,如果需要绘制一个以上参数变化时的根轨迹图,那么画出的不再是简单的根轨迹,而是根轨迹簇根轨迹方程实质上是一个向量方程,直接使用很不方便。
考虑到π)12(11+=-k j e ; ,...2,1,0±±=k因此,根轨迹方程(4—8)可用如下两个方程描述:π)12()()(11+=-∠--∠∑∑==k p s zs n i i m j j ,...2,1,0±±=kjm j i n i zs ps K --=∏∏==11* 方程(4—9)和(4—lO)是根轨迹上的点应该同时满足的两个条件,前者称为相角条件;后者叫做模值条件。