第5章 最优线性滤波器
- 格式:pdf
- 大小:2.08 MB
- 文档页数:89
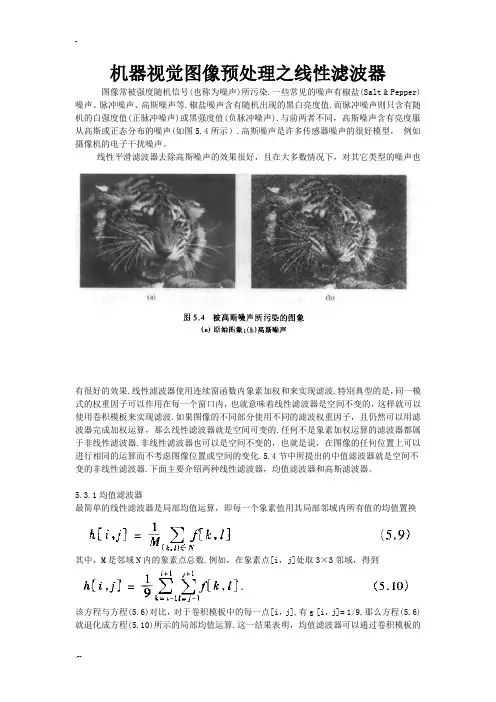
机器视觉图像预处理之线性滤波器图像常被强度随机信号(也称为噪声)所污染.一些常见的噪声有椒盐(Salt & Pepper) 噪声、脉冲噪声、高斯噪声等.椒盐噪声含有随机出现的黑白亮度值.而脉冲噪声则只含有随机的白强度值(正脉冲噪声)或黑强度值(负脉冲噪声).与前两者不同,高斯噪声含有亮度服从高斯或正态分布的噪声(如图5.4所示).高斯噪声是许多传感器噪声的很好模型,例如摄像机的电子干扰噪声。
线性平滑滤波器去除高斯噪声的效果很好,且在大多数情况下,对其它类型的噪声也有很好的效果.线性滤波器使用连续窗函数内象素加权和来实现滤波.特別典型的是,同一模式的权重因子可以作用在每一个窗口内,也就意味着线性滤波器是空间不变的,这样就可以使用卷积模板来实现滤波.如果图像的不同部分使用不同的滤波权重因子,且仍然可以用滤波器完成加权运算,那么线性滤波器就是空间可变的.任何不是象素加权运算的滤波器都属于非线性滤波器.非线性滤波器也可以是空间不变的,也就是说,在图像的任何位置上可以进行相同的运算而不考虑图像位置或空间的变化.5.4节中所提出的中值滤波器就是空间不变的非线性滤波器.下面主要介绍两种线性滤波器,均值滤波器和高斯滤波器。
5.3.1均值滤波器最简单的线性滤波器是局部均值运算,即每一个象素值用其局部邻域内所有值的均值置换其中,M是邻域N内的象素点总数.例如,在象素点[i,j]处取3×3邻域,得到该方程与方程(5.6)对比,对于卷积模板中的每一点[i,j],有g [i,j]= 1/9,那么方程(5.6) 就退化成方程(5.10)所示的局部均值运算.这一结果表明,均值滤波器可以通过卷积模板的等权值卷积运算来实现(见图5.5).实际上,许多图像处理运算都可以通过卷积来实现,邻域N的大小控制着滤波程度,对应大卷积模板的大尺度邻域会加大滤波程度.作为去除大噪声的代价,大尺度滤波器也会导致图像细节的损失.不同尺度下均值滤波的结果见图5.6.在设计线性平滑滤波器时,选择滤波权值应使得滤波器只有一个峰值,称之为主瓣,并且在水平和垂直方向上是对称的.一个典型的3×3平滑滤波器的权值模板如下:线性平滑滤波器去除了高频成分和图像中的锐化细节,例如:会把阶跃变化平滑成渐近变化,从而牺牲了精确定位的能力。
线性最佳滤波Wiener 滤波器研究唐建锋(衡阳师范学院物理与电子信息科学系,湖南衡阳 421008)摘 要:本文阐述了Wiener 滤波器线性最佳滤波理论,并运用白化滤波器方法,建立信号模型,给出了物理可实现性的条件下维纳 霍夫方程的Z 域解。
关键词:线性最佳滤波;Wiener 滤波器;最小均方误差;信号模型中图分类号:T N911 7文献标识码:A文章编号:1002 073X (2003)03 0034 030 引 言滤波器就是一种以物理硬件或计算机软件形式,从含噪声的观测数据中抽取信号的装置。
它可以实现滤波、平滑和预测等信息处理的基本任务。
当然,信号的抽取应该满足某种优化准则。
其中最常用的一种是使输出滤波器的均方误差的最小,这就是Wiener 滤波器。
Wiener 滤波的思想是四十年代提出来的[1],最初是对连续信号用模拟滤波器的形式出现的,而后才有离散形式。
设计最佳线性滤波Wiener 滤波器,就是寻求最小均方误差下滤波器的单位取样响应h (n )或传递函数H (Z)。
其实质是解维纳 霍夫(Wiener Hopf )方程。
在要求满足因果性即物理可实现性的条件下,求解维纳 霍夫方程是一个典型的难题。
维纳用频率处理的方法对具有有理分式表示的功率谱的广义平稳随机过程给出了滤波公式,但过程复杂,而伯特 香农(Bode shannon ),采用化滤波器方法可以使维纳 霍夫方程简化。
本文借用白化滤波器方法,研究了Wiener 滤波器信号模型,给出了因果性的条件下维纳 霍夫方程的Z 域解。
1 线性最佳滤波理论1 1 线性均方估计准则假设Wiener 滤波器的输入是一个平稳随机信号x (n),其响应是h (n),输出为y (n),则:y (n)=mh(m )x (n -m )(1)如果滤波器的期望输出为y d (n),h(n )的设计是要使得y (n )尽量接近于y d (n),因此称y (n)为y d (n)的估计值,用y ^d (n)表示,由此可得广义平稳的误差信号e(n):e(n)=y d (n )-y ^d (n )=y d (n)-x (n)*h(n )(2)显然e(n )可能是正的,也可能是负的,并且它是一个随机变量,其均方误差为:V (h)=E [e 2(n)]=E [y d (n)-x (n)*h(n )]2=E[y 2d (n)]-2 mh (m )E [y d (n )x (n -m )]+mlh(m)h(l)E[x (n -m)x (n -l)](3)令 q(m)=E[y d (n)x (n -m )]r x (m -l)=E[x(n-m)x(n -l)]为了得到最小均方误差,令V(h)的梯度 V(h)h(l)=0即:收稿日期:2002 02 24作者简介:唐建锋(1971 ),男,湖南永州人,衡阳师范学院物理与电子信息科学系讲师,国防科技大学在读硕士,主要从事信号的获取与处理研究。

第五章 数字滤波器一、数字滤波器结构填空题:1.FIR 滤波器是否一定为线性相位系统?( ).解:不一定计算题:2.设某FIR 数字滤波器的冲激响应,,3)6()1(,1)7()0(====h h h h6)4()3(,5)5()2(====h h h h ,其他n 值时0)(=n h 。
试求)(ωj e H 的幅频响应和相频响应的表示式,并画出该滤波器流图的线性相位结构形式。
解: {}70,1,3,5,6,6,5,3,1)(≤≤=n n h ∑-=-=10)()(N n nj j e n h e H ωω⎪⎪⎭⎫ ⎝⎛++⎪⎪⎭⎫ ⎝⎛++⎪⎪⎭⎫ ⎝⎛++⎪⎪⎭⎫ ⎝⎛+=+++++++=---------------ωωωωωωωωωωωωωωωωωωω2121272323272525272727277654326533566531j j j j j j j j j j j j j j j j j j j e e e e e e e e e e e ee e e e e e e )(27)(27cos 225cos 623cos 102cos 12ωφωωωωωωj j e H e=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛=- 所以)(ωj e H 的幅频响应为ωωωωωω2727cos 225cos 623cos 102cos 12)(j eH -⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛= )(ωj e H 的相频响应为ωωφ27)(-=作图题:3.有人设计了一只数字滤波器,得到其系统函数为:2112113699.00691.111455.11428.26949.02971.114466.02871.0)(------+-+-++--=z z z z z z z H 2112570.09972.016303.08557.1---+--+z z z请采用并联型结构实现该系统。
信噪比最大的最佳线性滤波器⏹最佳线性滤波器的推导⏹最佳线性滤波器的性质102030405060708090100-0.500.511.50102030405060708090100-0.500.511.5高信噪比 低信噪比How to increase SNR?信噪比:输出端信号在t=t 0时的瞬时功率与噪声的平均功率之比 s t d E n t 200020()[()]h (t ) X (t )=s (t )+n (t )Y (t )=s 0(t )+n 0(t ) 确知信号 零均值平稳随机过程信噪比最大01()()()2j t s t H S e d ∞ω-∞=ωωωπ⎰2201[()]()()2n E n t H G d ∞-∞=ωωωπ⎰输出噪声功率为: 最大)]([)(200200t n E t s d =h (t ) X (t )=s (t )+n (t )Y (t )=s 0(t )+n 0(t ) 输出信号为:分析思路:利用许瓦兹不等式 222()()|()||()|A B d A d B d ∞∞∞-∞-∞-∞≤⎰⎰⎰ωωωωωωω()*()A cB ω=ω等号成立的条件 0202()()12()()j t n S H e d d G H d ∞ω-∞∞-∞ωωω=πωωω⎰⎰022()()()()12()()j t n n n S G H e d G G H d ∞ω-∞∞-∞ωωωωω=πωωω⎰⎰0**()()()()()/()j t n n A H G e cB cS G ωω=ωω=ω=ωω0)()()(*t j n e G S c H ωωωω-⋅=00202222()()()()12()()()()()()12()()j t n n n j t n n n S G H e d G d G H d S d G H e d G G H d ∞ω-∞∞-∞∞∞ω-∞-∞∞-∞ωωωωω=πωωωωωωωωω≤πωωω⎰⎰⎰⎰⎰21()2()n S d G ∞-∞ω=ωπω⎰2()12()n S d G ∞-∞ω=ωπω⎰0max d =2()12()n S d G ∞-∞ω=ωπω⎰0max d 0)()()(*t j n e G S c H ωωωω-⋅=最佳滤波器:最大输出信噪比:最佳滤波器:()()()n S H c G ωω=⋅ω(1)幅频特性: 0arg ()arg ()H S t ω=-ω-ω(2)相频特性: 0)()()(*t j n e G S c H ωωωω-⋅=抑制噪声,增强信号0)(arg )(arg t S H ωωω--=000[arg ()arg ()]()1()()()21()()21()()2j t j S S t t j t t s t S H e d S H e d S H e d ∞ω-∞∞ω-ω-ω+ω-∞∞ω--∞=ωωωπ=ωωωπ=ωωωπ⎰⎰⎰0arg ()arg ()H S t ω=-ω-ω(2)相频特性:✓抵消输入信号相角argS(ω)的作用; ✓输出信号s 0(t)的全部频率分量的相位在t=t 0时刻相同,达到了相位相同、幅度相加的目的。
附录 D 最优等波纹线性相位 FIR 滤波器地设计对于线性相位 FIR滤波器地设计方法,窗函数与频率采样法是相对简单地方法,然而,它们都有存在不能精确地控制ω 与 ω 这类关键频率地问题。
p s本节描述地滤波器设计方法采用切比雪夫等波纹逼近思想,为了将理想幅度特性与实际幅度特性之间地加权逼近误差均匀地分散到滤波器地整个通带与阻带,并且最小化最大误差,则采用切比雪夫逼近方法被视为最优设计准则。
所得到地滤波器结构在通带与阻带都有等波纹。
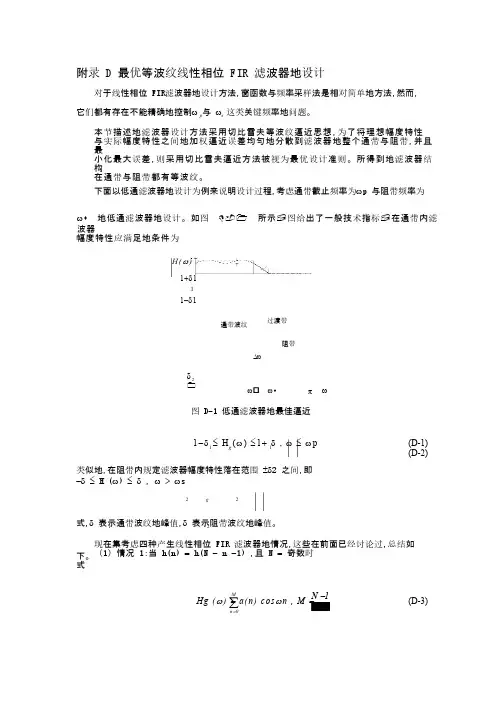
下面以低通滤波器地设计为例来说明设计过程,考虑通带截止频率为ωp 与阻带频率为ωs 地低通滤波器地设计。
如图 D-1 所示,图给出了一般技术指标,在通带内滤波器幅度特性应满足地条件为H (ω)1+δ111-δ1过渡带通带波纹阻带∆ωδ02ωp ωsωπ图 D-1 低通滤波器地最佳逼近1-δ ≤ H (ω) ≤1+ δ , ω ≤ ωp(D-1)(D-2)1g 1类似地,在阻带内规定滤波器幅度特性落在范围 ±δ2 之间,即-δ ≤ H (ω) ≤ δ , ω > ωs2g2式,δ 表示通带波纹地峰值,δ 表示阻带波纹地峰值。
12现在集考虑四种产生线性相位 FIR 滤波器地情况,这些在前面已经讨论过,总结如(1)情况 1:当 h(n) = h(N - n -1) ,且 N = 奇数时下。
式N -1M∑Hg (ω) = a(n) cos ωn , M =(D-3)2n =0⎧⎛ N -1⎫a(0) = h ⎪ ⎪⎪⎝2⎭N -1n =1, 2,⋅⋅⋅,(D-4)⎨⎛ N -1⎫2⎪a(n) = 2h - n,⎪⎪⎩⎝2⎭(2)情况 2:当 h(n) = h(N - n -1) ,且 N = 偶数时M⎛⎝ 1 ⎫2 ⎭N ∑Hg (ω) = b(n) cos n - ω , M =(D-5)(D-6)(D-7)⎪2n =1式⎛ N ⎝ 2⎫⎭N b(n) = 2h - n , n=1, 2,⋅⋅⋅,⎪2进一步对式(D-5)进行整理与重新排列,得到⎛ ω ⎫M -1N∑ ⎪H (ω) = cos ( ω), M =b☎n✆ cos ng ⎝ 2 ⎭2n =0{}{}其,系数 b(n) 与系数 b(n) 线性有关,可以证明两者之间存在如下关系 12( ),b ☎1✆ = 2b (1)- 2b (0)b 1b(0)= N b(n) 2b n b n 1=( )- ( - ), n =1, 2,⋅⋅⋅, - 2(D-8)(D-9)2Nb( 1) 2b ⎛ N ⎫ ⎪2⎝ 2 ⎭(3)情况 3:当 h(n) = -h(N - n -1) ,且 N = 奇数时N -1M ∑Hg (ω) = c(n)sin ωn , M =2n =1式⎛ N -1⎫⎭N -1c(n) = 2h - n ,n =1,2⋅⋅⋅(D-10)(D-11) ⎪⎝22进一步对式(D-9)进行整理与重新排列,得到M -1N -1∑ω sin☎ω✆H ☎ ✆%( ω), M =c☎n✆ cos ng2n =0{ }{}其,系数 c(n) 与系数 c(n) 线性有关,从式(7-2-9)与式(7-2-11)可以推导出两者之间存在如下关系N - 3N -1c() = c()22N - 5N - 3 c() = 2c()22N - 5 -( + ) = ( ), n = 2, 3,⋅⋅⋅,c☎n 1✆ c n 1 2c n-(D-12)212 ( ) =( )c 2 c 1c(0)-(4)情况 4:当 h(n) = -h(N - n -1) , N = 偶数时M⎛⎝ 1 ⎫2 ⎭N∑Hg (ω) = d(n)sin n - ω , M =(D-13)(D-14)(D-15)⎪2n =1式⎛ N ⎝ 2⎫⎭N d(n) = 2h - n , n =1, 2,⋅⋅⋅,⎪2与前面情况一样,可以对式(D-13)进行整理与重新排列,得到⎛ ω ⎫M -1N∑ %⎪H (ω) = sin ( ω), M =d(n) cos ng ⎝ 2 ⎭2n =0{}{}其,系数 d(n) 与系数 d(n) 线性有关,可以证明两者之间存在如下关系 Nd( 1)2d ⎛ N ⎫⎝ 2 ⎭⎪2N d(n 1) d n 2d n -- ( ) = ( ), n = 2, 3,⋅⋅⋅, -1(D-16)21 %( ) = ( )d 1 d 1d(0)-2归纳这四种情况地 Hg (ω) 表达式,并列于表 D-1。
线性滤波线性滤波:⽅框滤波、均值滤波、⾼斯滤波平滑处理(smoothing)也叫模糊处理(bluring),常⽤来减少图像上的噪点或者失真,还能⽤来降低图像分辨率。
1、图像滤波在尽量保持图像细节特征的前提下,对图像的噪点进⾏抑制,消除图像中的噪声成分叫做图像的平滑化或滤波操作。
信号或图像的能量⼤部分集中在中低频段,在⾼频段,有⽤的信息常被噪声淹没。
所以⼀个能降低⾼频成分幅度的滤波器就能够减弱噪声的影响。
图像滤波⽬的抽出特定频段的特征作为图像识别的依据;消除图像数字化时混⼊的噪声;滤波处理要求不能损坏图像轮廓、边缘等重要信息;使图像清晰、视觉效果好;平滑滤波有两类:(1)为了模糊;(2)为了消除噪⾳;滤波器:⼀个包含加权系数的窗⼝,将窗⼝放在图像之上,透过窗⼝看我们得到的图像。
2、线性滤波器3、滤波和模糊滤波是将信号中特定频段滤除,是抑制和防⽌⼲扰的⼀项重要措施。
滤波可分为低通滤波和⾼通滤波;低通:模糊,⾼通:锐化⽐如⾼斯滤波:⾼斯滤波就是指⾼斯函数作为滤波函数的滤波操作;⾼斯模糊就是⾼斯低通滤波;4、领域算⼦邻域算⼦:本像素周围的像素值来决定此像素的最终输出值的⼀种算⼦。
邻域算⼦作⽤:局部调⾊;图像滤波,实现平滑和锐化;去燥;边缘增强;线性邻域滤波:⼀种常⽤的邻域算⼦,像素的输出值取决于输⼊像素的加权和,⽤不同的权重去结合⼀个邻域内的像素,得到最终的像素值。
h(x,y)称为核,是滤波器的加权系数,即滤波系数。
过程=CNN⾥的卷积5、⽅框滤波boxFilter核:normalize=true,就成了均值滤波。
归⼀化:将要处理的量缩放到⼀个范围,⽅便统⼀处理;noramlize=false,计算像素邻域内的积分特性,如密集光流算法中的协⽅差矩阵。
7、均值滤波blur最简单的滤波操作。
输出图像每个像素是核窗⼝内对应范围的所有像素的均值,也就是归⼀化后的⽅框滤波。
主要⽅法:邻域平均法。
缺点:不能很好地保护图像细节,去燥的同时也破坏了图像细节,是图像变得模糊。
数字信号处理第五章习题解答————第五章————数字滤波网络5.1 学习要点本章主要介绍数字滤波器的系统函数()z H 与其网络结构流图之间的相互转换方法,二者之间的转换关系用Masson 公式描述。
由于信号流图的基本概念及Masson 公式已在信号与系统分析课程中讲过,所以下面归纳IIR 系统和FIR 系统的各种网络结构及其特点。
5.1.1 IIR 系统的基本网络结构1. 直接型结构如果将系统函数()z H 化为标准形式(5.1)式:()∑∑=-=--=Nk kkMk kkz az bz H 11 (5.1) 则可根据Masson 公式直接画出()z H 的直接II 型网络结构流图如图5.1所示(取N=4,M=3)。
二阶直接II 型网络结构最有用,它是级联型和并联型网络结构的基本网络单元。
优点:可直接由标准形式(5.1)或差分方程()()()∑∑==-+-=Mk kN k kk n x b k n y a n y 01画出网络结构流图,简单直观。
缺点:对于高阶系统:(1)调整零、极点困难;(2)对系数量化效应敏感度高;(3)乘法运算量化误差在系统输出端的噪声功率最大。
2. 级联型结构将(5.1)式描述的系统函数()z H 分解成多个二阶子系统函数的乘积形式()()()()z H z H z H z H m 21?= (5.2) (),1221122110------++=zzzzz H i i i i i i ααβββ m i ,,2,1 = (5.3)画出的级联型方框图如图5.2所示。
图中每一个子系统均为二阶直接型结构,根据()z H 的具体表达式确定()z H i 的系数i i i i 1210,,,αβββ和i 2α后,可画出()z H i 的网络结构流图如图5.3所示。
优点:(1)系统结构组成灵活;(2)调整零、极点容易,因为每一级二阶子系统()z H i 独立地确定一对共轭零点和一对共轭极点;(3)对系数量化效应敏感度低。