第6章点的复合运动
- 格式:ppt
- 大小:3.93 MB
- 文档页数:7
理论力学习题册答案班级姓名学号第一章静力学公理与受力分析(1)一.是非题1、加减平衡力系公理不但适用于刚体,还适用于变形体。
()2、作用于刚体上三个力的作用线汇交于一点,该刚体必处于平衡状态。
()3、刚体是真实物体的一种抽象化的力学模型,在自然界中并不存在。
()4、凡是受两个力作用的刚体都是二力构件。
()5、力是滑移矢量,力沿其作用线滑移不会改变对物体的作用效果。
()二.选择题1、在下述公理、法则、原理中,只适于刚体的有()①二力平衡公理②力的平行四边形法则③加减平衡力系公理④力的可传性原理⑤作用与反作用公理三.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)球A(b)杆AB- 1 -(c)杆AB、CD、整体(d)杆AB、CD、整体(e)杆AC、CB、整体(f)杆AC、CD、整体四.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)球A、球B、整体(b)杆BC、杆AC、整体- 2 -班级姓名学号第一章静力学公理与受力分析(2)一.画出下列图中指定物体受力图。
未画重力的物体不计自重,所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
(a)杆AB、BC、整体(c)杆AB、CD、整体CAFAxDBFAyFBWEW(b)杆ABOriginal Figure、BC、轮E、整体FBD of the entire frame(d)杆BC带铰、杆AC、整体- 3 -(e)杆CE、AH、整体(g)杆AB带轮及较A、整体(f)杆AD、杆DB、整体(h)杆AB、AC、AD、整体- 4 -班级姓名学号第二章平面汇交和力偶系一.是非题1、因为构成力偶的两个力满足F= - F’,所以力偶的合力等于零。
()2、用解析法求平面汇交力系的合力时,若选用不同的直角坐标系,则所求得的合力不同。
()3、力偶矩就是力偶。

《理论力学》思考题及习题宁夏大学机械工程学院技术基础部使用教材:理论力学(Ⅰ).哈尔滨工业大学理论力学教研室,第六版.北京:高等教育出版社.说明:以下各章的思考题及习题的页码和题号均以“哈工大”第六版《理论力学》教材为准。
静力学第一章静力学公理和物体的受力分析思考题:1.合矢与合力概念相同吗?2.几何法求合矢时,分矢与合矢怎样区别?3.力沿任意两个轴分解时的两个分力与力向该二轴的投影大小是否相同?4.二力平衡与作用力、反作用力的概念有什么不同?5.二力杆或二力构件的受力特点是什么?6.不计重力但作用有力偶的杆是二力杆吗?7.三力平衡汇交时怎样确定第三个力的作用线方向?8.画受力图的一般步骤是什么?在画物系中各个分离体的受力图时需要注意什么?9.P18思考题。
习题:P20-21:1-1 (a) (c) (d) (e) (g) (i) (j) (k); 1-2 (a) (d) (f)(i)(m) (o) 第二章平面汇交力系与平面力偶系思考题:1.汇交力系的几何法与解析法在应用上各有什么特点?2.解平衡问题时的一般步骤与注意事项?3.解物系问题时的注意事项?4.P33思考题。
5.力偶的特点与等效条件是什么?6.解力偶系平衡问题时的一般步骤与注意事项?习题:P36-40:2-1;2-3; 2-9; 2--12 (a) (c);2—14;2—17第三章平面任意力系思考题:1.力线平移定理的含义?2.用二矩式、三矩式求解问题时,附加什么条件才能保证物系平衡?3.求解平衡问题时,有哪些技巧可以使计算方便?4.P61思考题。
5.物系问题的解题思路?怎样选取研究对象?怎样列方程?6.销钉既受力又连接两个以上物体时的受力分析需掌握什么原则?7.怎样能做到一个方程求解一个未知数?8.节点法的本质是什么?9.截面法的本质是什么?10.怎样判断零杆?习题:P63-71:3-1;3-4;3-6;3-12(a);3-13;3-22;3-34第四章空间力系思考题:1.空间力系化简结果与平面力系化简结果的关系?2.什么力系有六个平衡方程?什么力系有三个平衡方程?什么力系有两个平衡方程?什么力系只有一个平衡方程?3.计算重心的常用方法。




(b)第2篇 工程运动学基础第4章 运动分析基础4-1 小环A 套在光滑的钢丝圈上运动,钢丝圈半径为R (如图所示)。
已知小环的初速度为v 0,并且在运动过程中小环的速度和加速度成定角θ,且 0 < θ <2π,试确定小环 A的运动规律。
解:Rv a a 2ns in ==θ,θs in 2R v a =θθt an co s d d 2tR v a tv a ===,⎰⎰=t v v t R v v 02d t an 1d 0θ t v R R v t s v 00t an t an d d -==θθ⎰⎰-=t s t t v R R v s 0000d tan tan d θθtv R R R s 0t an t an ln tan -=θθθ4-2 已知运动方程如下,试画出轨迹曲线、不同瞬时点的 1.⎪⎩⎪⎨⎧-=-=225.1324t t y tt x , 2.⎩⎨⎧==t y t x 2cos 2sin 3解:1.由已知得 3x = 4y (1) ⎩⎨⎧-=-=t y t x3344 t v 55-=⎩⎨⎧-=-=34y x5-=a 为匀减速直线运动,轨迹如图(a ),其v 、a 图像从略。
2.由已知,得2ar cco s 213ar cs i n y x =化简得轨迹方程:2942x y -=(2)轨迹如图(b ),其v 、a 图像从略。
4-3 点作圆周运动,孤坐标的原点在O 点,顺钟向为孤坐标的正方向,运动方程为221Rt s π=,式中s 以厘米计,t 以秒计。
轨迹图形和直角坐标的关系如右图所示。
当点第一次到达y 坐标值最大的位置时,求点的加速度在x 和y 轴上的投影。
解:Rt s v π== ,R v a π== t,222n Rt Rv a π==y 坐标值最大的位置时:R Rt s 2212ππ== ,12=∴tR a a x π==t ,R a y 2π-=4-4 滑块A ,用绳索牵引沿水平导轨滑动,绳的另一端绕在半径为r 的鼓轮上,鼓轮A习题4-1图习题4-2图习题4-3图e e -t (c)e e -t υ (b)R t R +υ (a)习题4-6图以匀角速度ω转动,如图所示。



·1·第6章 点的合成运动6.1 主要内容6.1.1 点的绝对运动、相对运动和牵连运动1.定系和动系若存在两个有相对运动的坐标系,则可指定其中一个为定系,另一个即为动系。
但工程上一般以固定在地面上的坐标系为定系,相对于定系运动着的坐标系称为动系。
2.动点和牵连点动点为研究的对象,牵连点是动点在动系上的重合点,随动点的相对运动而变,是动系上的点,不同瞬时,有不同的牵连点。
3.三种运动的关系动点相对于定系的运动定义为绝对运动;动点相对于动系的运动定义为相对运动;动系相对于定系的运动定义为牵连运动。
本章的主要任务就是建立这三者之间的定量关系,从而用来解决工程实际某些运动分析问题。
6.1.2 点的速度合成定理动点的绝对速度等于它的牵连速度与相对速度的矢量和。
这就是点的速度合成定理。
a e r =+v v v6.1.3 牵连运动为平移时,点的加速度合成定理当牵连运动为平移时,动点的绝对加速度等于牵连加速度与相对加速度的矢量和。
a e r =+a a a6.1.4 牵连运动为转动时,点的加速度合成定理当牵连运动为转动时,动点的绝对加速度等于牵连加速度、相对加速度与科氏加速度的矢量和,这就是牵连运动为转动时点的加速度合成定理。
a e r C =++a a a a其中r C v a ⨯=ω2。
当取平动动系时0=e ω;0=C a 。
6.2 基本要求1.掌握运动合成与分解的基本概念和方法,准确理解本章阐述的若干概念。
2.明确动点与动系的选择原则,能在具体问题中恰当地选择动点与动系,并正确地分析三种运动。
3.熟练掌握点的速度合成定理和牵连运动为平动时的加速度合成定理及其应用。
4.掌握科氏加速度的概念和计算,准确应用牵连运动为转动时的加速度合成定理及其应用。
6.3 重点讨论应用点的合成运动理论解决实际问题时,其关键是正确地选择动点和动系。
选择原则因具体情况不同而略有区别。
常见的问题有三种题型。
1.两个独立运动的物体,研究两者的相对运动。

理论力学习题集第一章静力学的基本概念及物体的受力分析1-1 画出指定物体的受力图,各接触面均为光滑面。
1-2 画出下列指定物体的受力图,各接触面均为光滑,未画重力的物体的重量均不计。
1-3 画出下列各物体以及整体受力图,除注明者外,各物体自重不计,所有接触处均为光滑。
(a) (b)(c) (d)(e) (f)第二章平面一般力系2-1 物体重P=20kN,用绳子挂在支架的滑轮B上,绳子的另一端接在铰车D 上,如图所示。
转动铰车,物体便能升起,设滑轮的大小及滑轮转轴处的摩擦忽略不计,A、B、C三处均为铰链连接。
当物体处于平衡状态时,试求拉杆AB和支杆CB所受的力。
2-2 用一组绳悬挂重P=1kN的物体,求各绳的拉力。
2-3 某桥墩顶部受到两边桥梁传来的铅直力P1=1940kN,P2=800kN及制动力T=193kN,桥墩自重W=5280kN,风力Q=140kN。
各力作用线位置如图所示,求将这些力向基底截面中心O简化的结果,如能简化为一合力,试求出合力作用线的位置。
2-4 水平梁的支承和载荷如图所示,试求出图中A、B处的约束反力。
2-5 在图示结构计算简图中,已知q=15kN/m,求A、B、C处的约束力。
2-6 图示平面结构,自重不计,由AB、BD、DFE三杆铰接组成,已知:P=50kN,M=40kN·m,q=20kN/m,L=2m,试求固定端A的反力。
图2-6 图2-72-7 求图示多跨静定梁的支座反力。
2-8 图示结构中各杆自重不计,D、E处为铰链,B、C为链杆约束,A为固定端,已知:q G=1kN/m,q=1kN/m,M=2kN·m,L1=3m,L2=2m,试求A、B、C 处约束反力。
图2-8 图2-92-9 支架由两杆AO、CE和滑轮等组成,O、B处为铰链,A、E是固定铰支座,尺寸如图,已知:r=20cm,在滑轮上吊有重Q=1000N的物体,杆及轮重均不计,试求支座A和E以及AO杆上的O处约束反力。


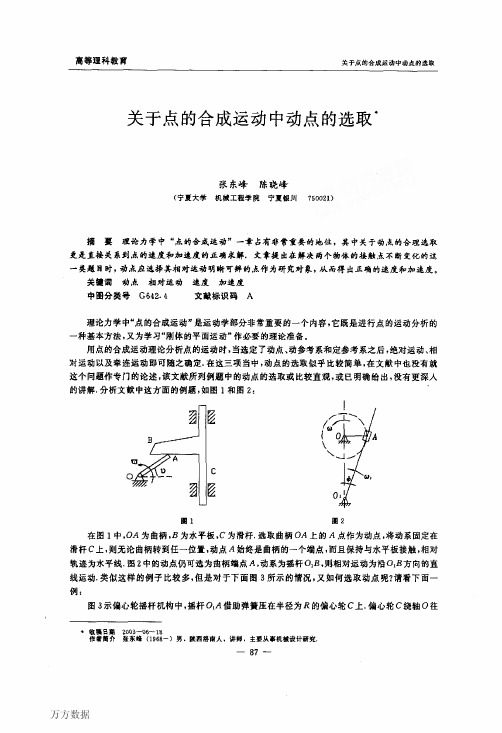
高等理科教育关于点的合成运动中动点的选取关于点的合成运动中动点的选取+张东峰陈晓峰(宁夏大学机械工程学院宁夏饭川750021)摘要理论力学中“点的合成运动”一幸占有非常重要的地位,其中关于动点的合理选取更是直接关系到点的速度和加速度的正确求解.文章提出在解决两个物体的接触点不断变化的这一类题目时,动点应选择其相对运动明晰可辨的点作为研究对象。
从而得出正确的速度和加速度。
关键词动点相对运动速度加速度中固分类号G642.4文献标识码A理论力学中“点的合成运动”是运动学部分非常重要的一个内容,它既是进行点的运动分析的一种基本方法,又为学习“刚体的平面运动”作必要的理论准备。
用点的合成运动理论分析点的运动时,当选定了动点、动参考系和定参考系之后,绝对运动、相对运动以及牵连运动即可随之确定.在这三项当中,动点的选取似乎比较简单,在文献中也没有就这个问题作专门的论述,该文献所列例题中的动点的选取或比较直观,或已明确给出,没有更深入的讲解.分析文献中这方面的例题,如图1和图2:c匿田1田2在图1中,OA为曲柄,B为水平板,c为滑杆.选取曲柄OA上的^点作为动点,将动系固定在滑杆C上,则元论曲柄转到任一位置,动点A始终是曲柄的一个端点,而且保持与水平板接触,相对轨迹为水平线.图z中的动点仍可选为曲柄端点A,动系为摇杆O,B,则相对运动为沿o,B方向的直线运动.类似这样的例子比较多,但是对于下面图3所示的情况,又如何选取动点呢?请看下面一例:图3示偏心轮摇杆机构中,摇杆0一^借助弹簧压在半径为尺的偏心轮c上.偏心轮c绕轴0往’嚣薯嚣羿2张00求5--峰06(--196188一)男.陕西洛南人.讲师,主要从事机械设计研究.一87—高等理科教育2004年第2期(总第54期)复摆动,从而带动摇杆绕轴o。
摆动.设OC上00。
时,轮c的角速度为u,角加速度为零,0—60。
.求此时摇杆0。
A的角速度wl和角加速度“1。
这是文献中的一道习题,没有类似的例题可供参考.如果动点选取不当.则无法得出正确答案.现设摇杆01A与偏心轮c的接触点为M,可以看出,随着偏心轮c的运动,接触点M是不断变化的,依次为偏心轮圆周上的各点.如果不加认真分析,将此瞬时(口=60。
机械原理问答题1。
什么是机构、机器和机械?答:机构:在运动链中,其中一个件为固定件(机架),一个或几个构件为原动件,其余构件具有确定的相对运动的运动链称为机构。
机器:能代替或减轻人类的体力劳动或转化机械能的机构。
机械:机器和机构的总称。
2.机器有什么特征?答:⑴经过人们精心设计的实物组合体。
⑵各部分之间具有确定的相对运动。
⑶能代替或减轻人的体力劳动,转换机械能.3.机构有什么特征?答:⑴经过人们精心设计的实物组合体。
⑵各部分之间具有确定的相对运动。
4.什么是构件和零件?答:构件:是运动的单元,它可以是一个零件也可以是几个零件的刚性组合。
零件:是制造的单元,加工制造不可再分的个体。
1.什么是平面机构?答:组成机构的所有构件都在同一平面或相互平行的平面上运动。
2。
什么是运动副?平面运动副分几类,各类都有哪些运动副?其约束等于几个?答:运动副:两个构件直接接触而又能产生一定相对运动的联接叫运动副.平面运动副分两类:(1)平面低副(面接触)包括:转动副、移动副,其约束为 2.(2)平面高副(点、线接触)包括:滚子、凸轮、齿轮副等,约束为 1.3。
什么是运动链,分几种?答:若干个构件用运动副联接组成的系统。
分开式链和闭式链。
4。
什么是机架、原动件和从动件?答:机架:支承活动构件运动的固定构件。
原动件:运动规律给定的构件.从动件:随原动件运动,并且具有确定运动的构件。
5.机构确定运动的条件是什么?什么是机构自由度?答:条件:原动件的数目等于机构的自由度数。
机构自由度:机构具有确定运动所需要的独立运动参数。
6 。
平面机构自由度的计算式是怎样表达的?其中符号代表什么?答:F =3n— 2P L—P H其中:n--—-活动构件的数目,P L-—-—低副的数目,p H—-——高副的数目.7.在应用平面机构自由度计算公式时应注意些什么?答:应注意复合铰链、局部自由度、虚约束。
8.什么是复合铰链、局部自由度和虚约束,在计算机构自由度时应如何处理?答:复合铰链:多个构件在同一轴线上组成转动副,计算时,转动副数目为m —1个局部自由度:与整个机构运动无关的自由度,计算时将滚子与其组成转动副的构件假想的焊在一起,预先排除局都自由度。

