理论力学点的速度合成定理
- 格式:doc
- 大小:338.00 KB
- 文档页数:8

8-4 点的加速度合成定理三种加速度(相对于三种运动,瞬时量)绝对加速度动点相对静系运动的加速度相对加速度动点相对动系运动的加速度牵连加速度牵连点的加速度8-4点的加速度合成定理a a r a e a动点--M 点定系--OXYZ动系--O ˊXˊYˊZˊ牵连点—动系O ˊXˊYˊZˊ上M 点M O r r r ''=+r x i y j z k '''''''=++为常矢量,,其中考虑到考虑到则M a O dr v r x i y j z k x i y j z k dt '''''''''''''==++++++eO O edv dv a a dt dt ''===r rr dv dv a dt dt==点的加速度合成定理—当牵连运动为平动时,动点在某瞬时的绝对加速度等于它在该瞬时的牵连加速度与相对加速度的矢量和。
2222222222o M a d r d r d x d y d z a i j k dt dt dt dt dt '''''''==+++a e r a a a =+上式中每一个矢量都有大小和方向两个要素,因此上式总共包含有12个要素,其中若仅有两个要素是未知的,则此矢量式可解。
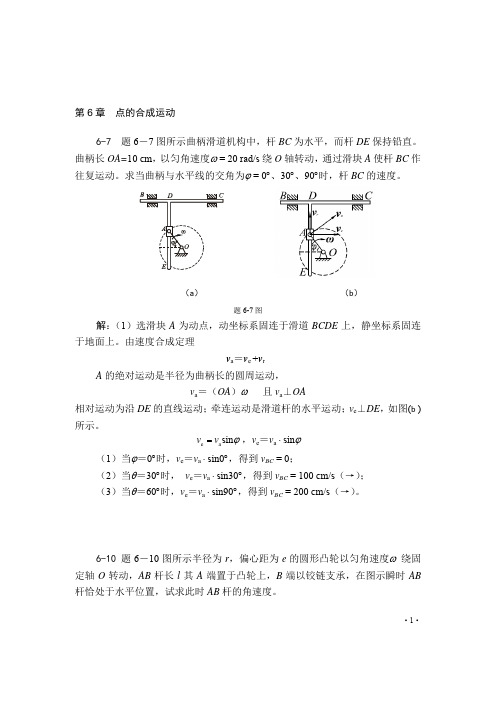
由于加速度包括沿轨迹切线方向的切向加速度和沿主法线方向的法向加速度两个分量,所以在最一般的情况下练习1凸轮在水平面上向右作减速运动,如图所示。
设凸轮半v a径为R,图示瞬时的速度和加速度分别为和。
求杆AB在图示位置时的加速度。
解:取动点和动系动点:顶杆AB上的A点动系:固结凸轮上的参考系绝对运动:铅垂方向直线运动相对运动:半圆周运动牵连运动:水平直线平移8该瞬时杆AB 的速度方向向上练习1—速度分析绝对速度:大小未知,方向沿杆AB 向上牵连速度:,方向水平向右相对速度:大小未知,方向沿凸轮圆周的切线根据速度合成定理ϕϕsin sin e r vv v ==a v e v r v e v v =练习1—加速度分析绝对加速度:大小未知,方向沿直线AB 牵连加速度:,沿水平方向相对加速度法向分量:,沿着,指向半圆板圆心相对加速度切向分量:大小未知,垂直于,假设指向右下a a e a e a a OA OA O。
![[理学]理论力学8—点的合成运动-土木_OK](https://img.taocdn.com/s1/m/4093f698af1ffc4fff47ac9a.png)
![理论力学第六章 点的合成运动 [同济大学]](https://img.taocdn.com/s1/m/63fd0a4dbe1e650e53ea9909.png)






复习资料一、判断题 1.在自然坐标系中,如果速度的大小v =常数,则加速度a =0。
(错) 2.不论牵连运动的何种运动,点的速度合成定理v a=v e+v r 皆成立。
(对)3.某一力偶系,若其力偶矩矢构成的多边形是封闭的,则该力偶系向一点简化 4.刚体处于瞬时平动时,刚体上各点的加速度相同。
(错) 5.某力系在任意轴上的投影都等于零,则该力系一定是平衡力系。
(错) 6.已知质点的质量和作用于质点的力,其运动规律就完全确定。
(错) 7.两个半径相同,均质等厚的铁圆盘和木圆盘,它们对通过质心且垂直于圆面的回转半径相同。
(错) 8.质心的加速度只与质点系所受外力的大小和方向有关,而与这些外力的作用位置无关。
(对) 9.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
(错) 10.在任意初始条件下,刚体不受力的作用、则应保持静止或作等速直线平移。
(错)11.在点的合成运动中,动点的绝对加速度总是等于牵连加速度与相对加速度的矢量和。
(错)时,主矢一定等于零,主矩也一定等于零。
(对)12.某空间力系由两个力构成,此二力既不平行,又不相交,则该力系简化的最后结果必为力螺旋。
(对)13.已知直角坐标描述的点的运动方程为X=f1(t ),y=f2(t ),z=f3(t ),则任一瞬时点的速度、加速度即可确定。
(对)14.一动点如果在某瞬时的法向加速度等于零,而其切向加速度不等于零,尚不能决定该点是作直线运动还是作曲线运动。
(对)15.刚体作平面运动时,平面图形内两点的速度在任意轴上的投影相等。
(错) 16某刚体作平面运动时,若A 和B 是其平面图形上的任意两点,则速度投影定理[][]A AB B ABv v =永远成立。
(对)二、填空题1. 杆AB 绕A 轴以ϕ=5t (ϕ以rad 计,t 以s 计) 的规律转动,其上一小环M 将杆AB 和半径为R (以m 计)的固定大圆环连在一起,若以O 1为原点,逆时针为正向,则用自然法表示的点M 的运动方程为_Rt Rs 102π+=。





(三)点的速度合成定理可以证实,动点的三种速度v a,v e,v r之间有如下关系式:v a=v e+v r即动点的绝对速度等于它的牵连速度和相对速度的矢量和,这就是点的速度合成定理。
按照此定理可知v a,v e,v r构成一速度平行四边形,其对角线为绝对速度va。
因为每个速度矢量包含大小和方向二个量,因此上式总共含有六个量,当已知其中随意四个量时,便可求出其余两个未知量。
应该指出,因为存在相对运动,所以不同瞬时,动系上与动点相重合的那一点即牵连点,在动系上的位置也随之而变化的。
(四)点的加速度合成定理动点的加速度合成与牵连运动的性质有关,当牵连运动为平动或转动时,动点的加速度合成定理如下:牵连运动为平动:a a=a e+a r牵连运动为转动:a a=a e+a r+a k式中a k称为科氏加速度。
它是因为牵连运动与相对运动互相影响而产生的。
a k的矢量表达式为a k=2ω×vr其中ω为动系的角速度矢。
设ω与vr间的夹角为θ (图4—2—9),则a k的大小为ak=2ωvrsinθa k的指向由ω与vr的矢积决定。
对于平面机构,因a a、a e、a r和a k等各加速度矢都位于同一平面中,所以运用加速度合成定理只能求解大小或方向共两个未知量。
因为aa或ae或ar都可能存在切向与法向两个加速度分量,因此在求解中,常应用合矢量投影定理举行详细计算。
(五)应用速度或加速度合成定理解题的普通步骤和主意1.分析机构的运动情况,按照题意适当地选取动点、动系和静系。
它们的选取主意,普通可从两个方面来考虑:其一,动系相对静系有运动,动点相对动系也有运动;其二,除题意异第1 页/共5 页常指明动系或动点外,尽可能使选取的动点对动系有显然而容易的相对运动轨迹。
在普通机构中,通常可选取传递运动的接触点为动点,与其邻接的刚体为动系。
2.分析绝对运动、相对运动和牵连运动。
绝对运动和相对运动都是指动点的运动。
在相对运动的分析中,可设想看见者站在动系上,看见到的动点运动即为它的相对运动。

1、一点动点:研究对象。
刚体上的点或一个单独的点。
2、二系定系:研究动点运动规律的参考系。
一般取地面。
动系:相对定系运动的参考系。
∞平面。
3、三运动绝对运动(absolute motion):动点相对定系的运动。
即在地面看动点的运动。
相对运动(relative motion):动点相对动系的运动。
即在动系上看动点的运动。
牵连运动(convected motion):动系相对定系的运动。
即在地面上看动系的运动。
动点:P;动系:汽车;定系:地面动点:P;动系:卡盘;定系:地面绝对运动:站在地面看P点直线运动相对运动:站在卡盘上看P点螺旋线牵连运动:站在地面看卡盘的运动定轴转动毛泽东《送瘟神》七律二首一绿水青山枉自多,华佗无奈小虫何!千村薜荔人遗矢,万户萧疏鬼唱歌。
坐地日行八万里,巡天遥看一千河。
牛郎欲问瘟神事,一样悲欢逐逝波。
二春风杨柳万千条,六亿神州尽舜尧。
红雨随心翻作浪,青山着意化为桥。
天连五岭银锄落,地动三河铁臂摇。
借问瘟君欲何在,纸船明烛照天烧。
思考:坐地日行八万里的定系是在那里建立的?地球绕太阳公转的轨迹近似的看作圆,轨道半径万公里4105.1×=R万公里250365/2=Rπ地球的赤道半径公里6400=r万公里01.42=rπ参考系为地心或地轴y 金星如果上帝在创世时与我商量一下,我会给他更好的建议。
选取适当的参考系,可使描述运动的结论:A的常接触点为动点,B为动系。
动点:AB上点A动系:凸轮相对运动轨迹清楚绝对运动:地面上看A 点直线相对运动:凸轮上看A点圆周运动牵连运动:在地面看凸轮的运动定轴转动动点:凸轮上A点动系:顶杆AB相对运动轨迹不清楚1绝对运动:圆周运动牵连运动平移相对运动???动点:OA上的A点动系:BC绝对运动:圆周运动相对运动:直线运动牵连运动:平移相对轨迹清楚动点:O1B上的A点动系:OC绝对运动圆周运动相对运动直线运动牵连运动定轴转动相对轨迹清楚动点:OC上的A点动系:O1B相对轨迹不清楚动点:CD上的B点动系是OA绝对运动相对运动牵连运动直线运动直线运动定轴转动相对轨迹清楚2)无常接触点(线线接触)条件:当两个刚体运动过程中,没有常接触点,只是轮廓线接触.结论:圆心为动点(定系),另一刚体为动系。
理论力学点的速度合成定理
建立动点的绝对速度,相对速度和牵连速度之间的关系。
MM ' 绝对 绝对 M 1M ' 相对 M 1M ' 相对
MM ' MM 1M 1M '
t → t + t AB →A'B'
M → M'
成M →M →M
∆t ,
∆t →0 的 ,
lim
M M '=lim
M M +lim
M M ∆t →0
∆t →0
∆t →0
∆t
∆t
∆t
v a =v e +v r
即在任 瞬 动点的绝对速度等于其牵连速度与相对速度的矢量和,这就是点的速度合成定理。
v a —动点的绝对速度
v r —动点的相对速度 v e —动点的牵连速度,是动
系 点(牵连点)的速度
动系 ,动系 点速度 相等; 动系 动 ,v e 是 瞬 动系 与动点相 合点的速度。
r M =r O '+r 'r
r '=x 'i '+y 'j '+z 'k '
(
r M'r M =r M '
v r
= d r '
=d x 'i '+d y 'j '+d t d t d t v v r i ' j ' k '
e v =d r M '=d r
O '+x 'd i '+y 'd j '+z d t d t d t d t a =v e +v r
=d r O '+x 'd i '+y 'd j '+z 'd k '+d x 'i '+d y 'j '+d z 'k 'd t d t d t d t d t d t d t =
d r M d t
v v e
M' x' y' z'
v a
点的速度合成定理是瞬 矢量 ,共包括大小‚方向 六个元素,已知任意四个元素,就能求出其他 个。
[ ] 已知 小 ,速度 v 1, A 相对小 的速度 v 2。
求 A 的 速度。
动点: A ,动系:小 相对 动: ;相对速度v r =v 2↑ 牵连 动: ; 牵连速度v e =v 1→
绝对 动: , 知; 绝对速度v a 的大小 方向 求。
A
出速度 四 ,
的速度大小和方向
速度合成定理 v a =v e +
v r
v =v ==a A
θ=arctan 2
v 1
瞬 ,OC⊥CA O A B 点共 。
求 动 AB的速度。
动点 A点,动系 于 。
绝对速度v a=? 求,方向//AB 相对
速度v r=? 知,方向⊥CA 牵连
速度v e=OA⋅ω=2eω,方向⊥OA
速度合成定理v a=v e+ v r,
出速度 四 。
v=v⋅tan300 a e =2 3ω
3
∴v=2 3ω(↑)
3
AB
[]
已知 OC e,R=3e,ω 速度
v r v
a
ϕ
e
[] 的 。
OA的 速度 ω,
A 动 O1
B 动。
已知OA=r,OO1=l,求 OA
O1B的 速度ω1。
B
v e=v a sinϕ=rωsinϕ
v e
2
=O1A⋅ω1=
2
O1A=ω1=22
l+r
r ω
OA A点 动点, O1B 动系。
绝对速度v=rω,方向⊥OA
a
相对速度v r= ?
牵连速度v e = ?
,方向//O1B
,方向⊥O1B
出,求 合成 动的速度 的 动点,动系和定系
动的
速度的
速度合成定理 出速度 四 。
v
a
=v
e
+v
r
速度 四 ,求出 知量。
恰 择动点 动系是求 合成 动 的关键。
动点 动系的 择原
动点 动系和定系 别属于 个 的 体,否 绝 对 相对和牵连 动中就缺少 动, 能成 合成 动
动点相对动系的相对 动 要易于 观判断。
已知绝对 动和牵连 动求 相对 动的 外
v e a sin ϕ=u
sin ϕ
v =
[ ] AB 在 r 的 定 速u , 。
求 在 和 点 的小 M 的速度。
小 M 动点,动系 在AB ,动点的速度合成矢量 。
sin ϕ=
v e v a
u
A 动点,动系与
连, A 点速度,
v a =v e +v r
v e =v a sin θ=v sin θ
[ ]求 中OC 点C 的速度。
其中v 与θ已知, O A =a ,AC =b 。
=
v e =v sin θa
OC
OA ωv sin θv C =OC ⋅ωOC
=a +b
a
[]已知: r , 其速度 v,θ=300。
OA 在 。
求 OA
相接触的 个 体的接触点 随 间而变化,因此 体的接触点 宜 动点,否 相对 动的 就会很困难。
这 情况 ,需 择满足 条原 的非接触
点 动点。
发现, C的 是 ,若 OA动系,其相对 容易确定是 。
x
θ
C
:C点 动点,
动系 于OA 。
绝对 动: 动,
绝对速度:
相对 动: 动,
相对速度: v r
知,方向//O A
牵连 动:定 动, 牵连速度: v e
v a=v,方向→
=OC⋅ω 知,ω 求,方向⊥OC
a
e
v
出速度 四 。
速度合成定理v
a
=v
e
+v
r
e a
v=v⋅tanθ=
3e
v=OC⋅ω=r ⋅ω=2rω,
sinθ
∴ω=v e= 1 ⋅=
2r2r36r
v [ ]p1947-13AB 速度v 1向 ,CD 向 速度v 2 , 条 的 θ,求 在 的小 M 的速度。
M 动点,AB 动 系,相对速度 牵连速度 。
D
v a =v e1+v r1
M 动点,CD 相对速度 牵连速度 。
v a =v e2+v r2
v e1+v r1=v e2+v r 2
其中
v e1=v 1,
v e2=v 2
v 1=
v 2cos θ+v r2sin θ∴v r2=(v 1-v 2cos θ)/sin θ
动点M 的绝对速度
等 向y
v =a =
=
B
D
v e1+v r1=v e2+v r2
[ ]在 A 和B 速度v =36 km/h ,A 向 ,B O R =100m 的 。
在 瞬 , 的 S =50m,θ=30 , 求 1 B 相对A 的速度。
2 A 相对B 的速度。
1 求B 相对于A 的速度。
r1v =2v cos 30=62.4(km/h)
B 动点,动系 连于A 。
速度矢量
v B =v a1=v e1+v r1
v e1=
v A =v B =v a1=v
, 度。
(2)求A 相对于B 的速度, A 动点,动系 连于B 。
v e2=OA ⋅
=50⋅==18(km/h)
v v
R 2v B R
v a2=v A =v
v r2==40.2(km/h)
tan ϕ=e2
=v a 218
36
=0.5
v ϕ=2634'
,A 相对B 的速度 定等于B 相对A 的速度。