BP神经网络函数逼近论文
- 格式:pdf
- 大小:676.73 KB
- 文档页数:23
应用BP 神经网络逼近非线性函一、实验要求1、逼近的非线性函数选取为y=sin(x 1)+cos(x 2) ,其中有两个自变量即x1,x2,一个因变量即y。
2、逼近误差<5% ,即:应用测试数据对网络进行测试时,神经网络的输出与期望值的最大误差的绝对值小于期望值的5% 。
3、学习方法为经典的BP 算法或改进形式的BP 算法,鼓励采用改进形式的BP 算法。
4、不允许采用matlab 中现有的关于神经网络建立、学习、仿真的任何函数及命令。
二、实验基本原理2.1神经网络概述BP 神经网络是一种多层前馈神经网络,该网络的主要特点是信号前向传播,误差反向传播。
在前向传递中,输入信号从输入层经隐含层逐层处理,直至输出层。
每一层的神经元状态只影响下一层神经元状态。
如果输出层得不到期望输出,则转入反向传播,根据预判误差调整网络权值和阈值,从而使BP 神经网络预测输出不断逼近期望输出。
BP 神经网络的拓扑结构如图所示。
2.2BP 神经网络训练步骤BP 神经网络预测前首先要训练网络,通过训练使网络具有联想记忆和预测能力。
BP 神经网络的训练过程包括以下几个步骤。
步骤 1 :网络初始化。
根据系统输入输出序列(X,Y) 确定网络输入层节点数n 、隐含层节点数l、输出层节点数m ,初始化输入层、隐含层和输出层神经元之间的连接权值ωij,ωjk ,初始化隐含层阈值a,输出层阈值 b ,给定学习速率和神经元激励函数。
步骤 2 :隐含层输出计算。
根据输入变量X,输入层和隐含层间连接权值ω ij 以及隐含层阈值a,计算隐含层输出H 。
2.3 附加动量法经典 BP 神经网络采用梯度修正法作为权值和阈值的学习算法, 从网络预测误差的负梯 度方向修正权值和阈值, 没有考虑以前经验的积累,学习过程收敛缓慢。
对于这个问题,可 以采用附加动量法来解决,带附加动量的算法学习公式为(k) (k 1) (k) a (k 1) (k 2)式中,ω (k),ω(k-1) ,ω(k-2)分别为 k ,k-1,k-2 时刻的权值; a 为动量学习率,一般取值 为 0.95 。
文献综述电气工程及自动化BP神经网络研究综述摘要:现代信息化技术的发展,神经网络的应用范围越来越广,尤其基于BP算法的神经网络在预测以及识别方面有很多优势。
本文对前人有关BP神经网络用于识别和预测方面的应用进行归纳和总结,并且提出几点思考方向以作为以后研究此类问题的思路。
关键词:神经网络;数字字母识别;神经网络的脑式智能信息处理特征与能力使其应用领域日益扩大,潜力日趋明显。
作为一种新型智能信息处理系统,其应用贯穿信息的获取、传输、接收与加工各个环节。
具有大家所熟悉的模式识别功能,静态识别例如有手写字的识别等,动态识别有语音识别等,现在市场上这些产品已经有很多。
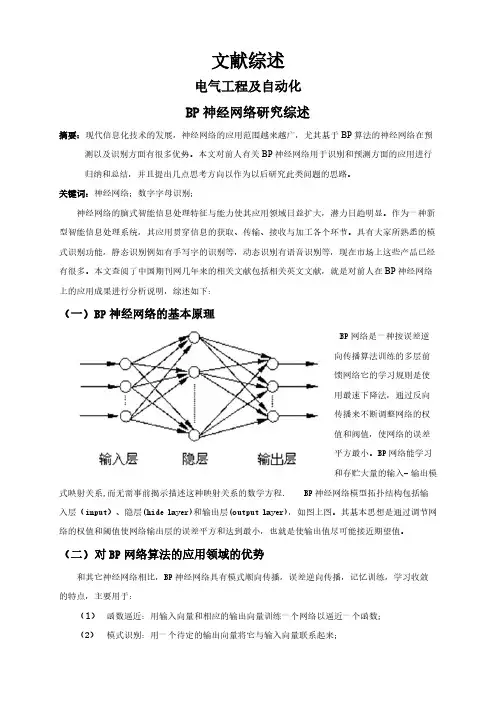
本文查阅了中国期刊网几年来的相关文献包括相关英文文献,就是对前人在BP神经网络上的应用成果进行分析说明,综述如下:(一)B P神经网络的基本原理BP网络是一种按误差逆向传播算法训练的多层前馈网络它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阀值,使网络的误差平方最小。
BP网络能学习和存贮大量的输入- 输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程.BP神经网络模型拓扑结构包括输入层(input)、隐层(hide layer)和输出层(output layer),如图上图。
其基本思想是通过调节网络的权值和阈值使网络输出层的误差平方和达到最小,也就是使输出值尽可能接近期望值。
(二)对BP网络算法的应用领域的优势和其它神经网络相比,BP神经网络具有模式顺向传播,误差逆向传播,记忆训练,学习收敛的特点,主要用于:(1)函数逼近:用输入向量和相应的输出向量训练一个网络以逼近一个函数;(2)模式识别:用一个待定的输出向量将它与输入向量联系起来;(3)数据压缩:减少输出向量维数以便于传输或存储;(4)分类:把输入向量所定义的合适方式进行分类;]9[BP网络实质上实现了一个从输入到输出的映射功能,,而数学理论已证明它具有实现任何复杂非线性映射的功能。
BP神经网络及深度学习研究摘要:人工神经网络是一门交叉性学科,已广泛于医学、生物学、生理学、哲学、信息学、计算机科学、认知学等多学科交叉技术领域,并取得了重要成果。
BP(Back Propagation)神经网络是一种按误差逆传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。
本文将主要介绍神经网络结构,重点研究BP神经网络原理、BP神经网络算法分析及改进和深度学习的研究。
关键词:BP神经网络、算法分析、应用1 引言人工神经网络(Artificial Neural Network,即ANN ),作为对人脑最简单的一种抽象和模拟,是人们模仿人的大脑神经系统信息处理功能的一个智能化系统,是20世纪80 年代以来人工智能领域兴起的研究热点。
人工神经网络以数学和物理方法以及信息处理的角度对人脑神经网络进行抽象,并建立某种简化模型,旨在模仿人脑结构及其功能的信息处理系统。
人工神经网络最有吸引力的特点就是它的学习能力。
因此从20世纪40年代人工神经网络萌芽开始,历经两个高潮期及一个反思期至1991年后进入再认识与应用研究期,涌现出无数的相关研究理论及成果,包括理论研究及应用研究。
最富有成果的研究工作是多层网络BP算法,Hopfield网络模型,自适应共振理论,自组织特征映射理论等。
因为其应用价值,该研究呈愈演愈烈的趋势,学者们在多领域中应用[1]人工神经网络模型对问题进行研究优化解决。
人工神经网络是由多个神经元连接构成,因此欲建立人工神经网络模型必先建立人工神经元模型,再根据神经元的连接方式及控制方式不同建立不同类型的人工神经网络模型。
现在分别介绍人工神经元模型及人工神经网络模型。
1.1 人工神经元模型仿生学在科技发展中起着重要作用,人工神经元模型的建立来源于生物神经元结构的仿生模拟,用来模拟人工神经网络[2]。
人们提出的神经元模型有很多,其中最早提出并且影响较大的是1943年心理学家McCulloch和数学家W. Pitts在分析总结神经元基本特性的基础上首先提出的MP模型。
控制系统仿真与模型处理设计报告(采用BP神经网络完成非线性函数的逼近)1、题目要求:(1)确定一种神经网络、网络结构参数和学习算法。
(2)选择适当的训练样本和检验样本,给出选取方法。
(3)训练网络使学习目标误差函数达到0.01,写出学习结束后的网络各参数,并绘制学习之前、第100次学习和学习结束后各期望输出曲线、实际输出曲线。
绘制网络训练过程的目标误差函数曲线。
(4)验证网络的泛化能力,给出网络的泛化误差。
绘制网络检验样本的期望输出曲线和网络输出曲线。
(5)分别改变神经网络的中间节点个数、改变网络的层数、改变学习算法进行比较实验,讨论系统的逼近情况,给出你自己的结论和看法。
2、设计方案:在MATLAB中建立M文件下输入如下命令:x=[0:0.01:1];y=2.2*power(x-0.25,2)+sin(5*pi*x);plot(x,y)xlabel('x');ylabel('y');title('非线性函数');得到如下图形,即所给的非线性函数曲线图:构造一个1-7-1的BP神经网络,第一层为输入层,节点个数为1;第二层为隐层,节点个数为7;变换函数选正切s型函数(tansig);第三层为输出层,节点个数为1,输出层神经元传递函数为purelin函数。
并且选Levenberg-Marquardt算法(trainlm)为BP网络的学习算法。
对于该初始网络,我们选用sim()函数观察网络输出。
继续在M函数中如下输入。
net=newff(minmax(x),[1,7,1],{'tansig','tansig','purelin'},'trainlm'); y1=sim(net,x);figure;plot(x,y,'b',x,y1,'r')title('期望输出与实际输出比较');xlabel('t');则得到以下所示训练的BP网络期望输出与实际输出曲线比较:应用函数train()对网络进行训练之前,需要预先设置训练参数。
学年论文(本科)学院数学与信息科学学院专业信息与计算科学专业年级10级4班姓名徐玉琳于正平马孝慧李运凤郭双双任培培论文题目BP神经网络原理与应用指导教师冯志敏成绩2013年 9月 24日BP神经网络的原理与应用1.BP神经网络的原理1.1 BP神经网络的结构BP神经网络模型是一个三层网络,它的拓扑结构可被划分为:输入层(InputLayer )、输出层(Outp ut Layer ) ,隐含层(Hide Layer ).其中,输入层与输出层具有更重要的意义,因此也可以为两层网络结构(把隐含层划入输入层,或者把隐含层去掉)每层都有许多简单的能够执行并行运算的神经元组成,这些神经元与生物系统中的那些神经元非常类似,但其并行性并没有生物神经元的并行性高.BP神经网络的特点:1)网络由多层构成,层与层之间全连接,同一层之间的神经元无连接.2)BP网络的传递函数必须可微.因此,感知器的传递函数-——二值函数在这里没有用武之地.BP网络一般使用Sigmoid函数或线性函数作为传递函数.3)采用误差反向传播算法(Back-Propagation Algorithm)进行学习.在BP 网络中,数据从输入层隐含层逐层向后传播,训练网络权值时,则沿着减少误差的方向,从输出层经过中间各层逐层向前修正网络的连接权值.随着学习的不断进行,最终的误差越来越来小.BP神经网络的学习过程BP神经网络的学习算法实际上就是对误差函数求极小值的算法,它采用的算法是最速下降法,使它对多个样本进行反复的学习训练并通过误差的反向传播来修改连接权系数,它是沿着输出误差函数的负梯度方向对其进行改变的,并且到最后使误差函数收敛于该函数的最小点.1.3 BP网络的学习算法BP网络的学习属于有监督学习,需要一组已知目标输出的学习样本集.训练时先使用随机值作为权值,修改权值有不同的规则.标准的BP神经网络沿着误差性能函数梯度的反向修改权值,原理与LMS算法比较类似,属于最速下降法.拟牛顿算法牛顿法是一种基于二阶泰勒级数的快速优化算法.其基本方法是1(1)()()()x k x k A k g k -+=-式中 ()A k ----误差性能函数在当前权值和阀值下的Hessian 矩阵(二阶导数),即2()()()x x k A k F x ==∇牛顿法通常比较梯度法的收敛速度快,但对于前向型神经网络计算Hessian 矩阵是很复杂的,付出的代价也很大.有一类基于牛顿法的算法不需要二阶导数,此类方法称为拟牛顿法(或正切法),在算法中的Hessian 矩阵用其近似值进行修正,修正值被看成梯度的函数. 1)BFGS 算法在公开发表的研究成果中,你牛顿法应用最为成功得有Boryden,Fletcher,Goldfard 和Shanno 修正算法,合称为BFG 算法. 该算法虽然收敛所需的步长通常较少,但在每次迭代过程所需要的计算量和存储空间比变梯度算法都要大,对近似Hessian 矩阵必须进行存储,其大小为n n ⨯,这里n 网络的链接权和阀值的数量.所以对于规模很大的网络用RPROP 算法或任何一种梯度算法可能好些;而对于规模较小的网络则用BFGS 算法可能更有效. 2)OSS 算法 由于BFGS 算法在每次迭代时比变梯度算法需要更多的存储空间和计算量,所以对于正切近似法减少其存储量和计算量是必要的.OSS 算法试图解决变梯度法和拟牛顿(正切)法之间的矛盾,该算法不必存储全部Hessian 矩阵,它假设每一次迭代时与前一次迭代的Hessian 矩阵具有一致性,这样做的一个有点是,在新的搜索方向进行计算时不必计算矩阵的逆.该算法每次迭代所需要的存储量和计算量介于梯度算法和完全拟牛顿算法之间. 最速下降BP 法最速下降BP 算法的BP 神经网络,设k 为迭代次数,则每一层权值和阀值的修正按下式进行(1)()()x k x k g k α+=-式中()x k —第k 次迭代各层之间的连接权向量或阀值向量;()g k =()()E k x k ∂∂—第k 次迭代的神经网络输出误差对各权值或阀值的梯度向量.负号表示梯度的反方向,即梯度的最速下降方向;α—学习效率,在训练时是一常数.在MATLAB 神经网络工具箱中,,可以通过改变训练参数进行设置;()E K —第k 次迭代的网络输出的总误差性能函数,在MATLAB 神经网络工具箱中BP 网络误差性能函数默认值为均方误差MSE,以二层BP 网络为例,只有一个输入样本时,有2()()E K E e k ⎡⎤=⎣⎦21S≈22221()S i i i t a k =⎡⎤-⎣⎦∑ 222212,1()()()()s ii j i i j a k f w k a k b k =⎧⎫⎪⎪⎡⎤=-⎨⎬⎣⎦⎪⎪⎩⎭∑21221112,,11()(()())()s s i j i j i i i j j f w k f iw k p ib k b k ==⎧⎫⎡⎤⎛⎫⎪⎪=++⎢⎥ ⎪⎨⎬⎢⎥⎝⎭⎪⎪⎣⎦⎩⎭∑∑若有n 个输入样本2()()E K E e k ⎡⎤=⎣⎦21nS ≈22221()S ii i ta k =⎡⎤-⎣⎦∑根据公式和各层的传输函数,可以求出第k 次迭代总误差曲面的梯度()g k =()()E k x k ∂∂,分别代入式子便可以逐次修正其权值和阀值,并是总的误差向减小的方向变化,直到达到所需要的误差性能为止. 1.4 BP 算法的改进BP 算法理论具有依据可靠、推导过程严谨、精度较高、通用性较好等优点,但标准BP 算法存在以下缺点:收敛速度缓慢;容易陷入局部极小值;难以确定隐层数和隐层节点个数.在实际应用中,BP 算法很难胜任,因此出现了很多改进算.利用动量法改进BP 算法标准BP 算法实质上是一种简单的最速下降静态寻优方法,在修正W(K)时,只按照第K 步的负梯度方向进行修正,而没有考虑到以前积累的经验,即以前时刻的梯度方向,从而常常使学习过程发生振荡,收敛缓慢.动量法权值调整算法的具体做法是:将上一次权值调整量的一部分迭加到按本次误差计算所得的权值调整量上,作为本次的实际权值调整量,即:其中:α为动量系数,通常0<α<0.9;η—学习率,范围在0.001~10之间.这种方法所加的动量因子实际上相当于阻尼项,它减小了学习过程中的振荡趋势,从而改善了收敛性.动量法降低了网络对于误差曲面局部细节的敏感性,有效的抑制了网络陷入局部极小.自适应调整学习速率标准BP算法收敛速度缓慢的一个重要原因是学习率选择不当,学习率选得太小,收敛太慢;学习率选得太大,则有可能修正过头,导致振荡甚至发散.可采用图所示的自适应方法调整学习率.调整的基本指导思想是:在学习收敛的情况下,增大η,以缩短学习时间;当η偏大致使不能收敛时,要及时减小η,直到收敛为止.动量-自适应学习速率调整算法采用动量法时,BP算法可以找到更优的解;采用自适应学习速率法时,BP算法可以缩短训练时间.将以上两种方法结合起来,就得到动量-自适应学习速率调整算法.1. L-M学习规则L-M(Levenberg-Marquardt)算法比前述几种使用梯度下降法的BP算法要快得多,但对于复杂问题,这种方法需要相当大的存储空间L-M(Levenberg-Marquardt)优化方法的权值调整率选为:其中:e —误差向量;J —网络误差对权值导数的雅可比(Jacobian )矩阵;μ—标量,当μ很大时上式接近于梯度法,当μ很小时上式变成了Gauss-Newton 法,在这种方法中,μ也是自适应调整的. 1.5 BP 神经网络的设计 网络的层数输入层节点数取决于输入向量的维数.应用神经网络解决实际问题时,首先应从问题中提炼出一个抽象模型,形成输入空间和输出空间.因此,数据的表达方式会影响输入向量的维数大小.例如,如果输入的是64*64的图像,则输入的向量应为图像中所有的像素形成的4096维向量.如果待解决的问题是二元函数拟合,则输入向量应为二维向量.理论上已证明:具有偏差和至少一个S 型隐含层加上一个线性输出层的网络,能够逼近任何有理数.增加层数可以更进一步的降低误差,提高精度,但同时也使网络复杂化,从而增加了网络权值的训练时间.而误差精度的提高实际上也可以通过增加神经元数目来获得,其训练效果也比增加层数更容易观察和调整.所以一般情况下,应优先考虑增加隐含层中的神经元数. 隐含层的神经元数网络训练精度的提高,可以通过采用一个隐含层,而增加神经元数了的方法来获得.这在结构实现上,要比增加隐含层数要简单得多.那么究竟选取多少隐含层节点才合适?这在理论上并没有一个明确的规定.在具体设计时,比较实际的做法是通过对不同神经元数进行训练对比,然后适当地加上一点余量.1)0niMi C k =>∑,k 为样本数,M 为隐含层神经元个数,n 为输入层神经元个数.如i>M,规定C i M =0.2)和n 分别是输出层和输入层的神经元数,a 是[0.10]之间的常量.3)M=2log n ,n 为输入层神经元个数.初始权值的选取由于系统是非线性的,初始值对于学习是否达到局部最小、是否能够收敛及训练时间的长短关系很大.如果初始值太大,使得加权后的输入和n落在了S型激活函数的饱和区,从而导致其导数f (n)非常小,从而使得调节过程几乎停顿下来.所以一般总是希望经过初始加权后的每个神经元的输出值都接近于零,这样可以保证每个神经元的权值都能够在它们的S型激活函数变化最大之处进行调节.所以,一般取初始权值在(-1,1)之间的随机数.学习速率学习速率决定每一次循环训练中所产生的权值变化量.大的学习速率可能导致系统的不稳定;但小的学习速率导致较长的训练时间,可能收敛很慢,不过能保证网络的误差值不跳出误差表面的低谷而最终趋于最小误差值.所以在一般情况下,倾向于选取较小的学习速率以保证系统的稳定性.学习速率的选取范围在0.01-0.8之间.1.6BP神经网络局限性需要参数多且参数选择没有有效的方法对于一些复杂问题 ,BP 算法可能要进行几小时甚至更长的时间训练,这主要是由于学习速率太小所造成的.标准BP 网络学习过程缓慢,易出现平台,这与学习参数率l r的选取有很大关系.当l r较时,权值修改量大,学习速率也快,但可能产生振荡;当l r较小时,虽然学习比较平稳,但速度十分缓慢.容易陷入局部最优BP网络易陷入局部最小, 使 BP网络不能以高精度逼近实际系统.目前对于这一问题的解决有加入动量项以及其它一些方法.BP 算法本质上是以误差平方和为目标函数 , 用梯度法求其最小值的算法.于是除非误差平方和函数是正定的, 否则必然产生局部极小点, 当局部极小点产生时 , BP算法所求的就不是解.1.6.3 样本依赖性这主要表现在网络出现的麻痹现象上.在网络的训练过程中,如其权值调的过大,可能使得所有的或大部分神经元的加权值偏大,这使得激活函数的输入工作在S型转移函数的饱和区,从而导致其导函数非常小,使得对网络权值的调节过程几乎停顿下来.通常为避免这种现象的发生,一是选取较小的初始权值,二是采用较小的学习速率,但又要增加时间训练.初始权敏感对于一些复杂的问题,BP算法可能要进行几个小时甚至更长时间的训练.这主要是由于学习速率太小造成的.可采用变化的学习速率或自适应的学习速率来加以改进.2.BP神经网络应用2.1 手算实现二值逻辑—异或这个例子中,采用手算实现基于BP网络的异或逻辑.训练时采用批量训练的方法,训练算法使用带动量因子的最速下降法.在MATLAB中新建脚本文件main_xor.m,输入代码如下:%脚本%批量训练方式.BP网络实现异或逻辑%%清理clear allclcrand('seed',2)eb = 0.01; %误差容限eta = 0.6; %学习率mc = 0.8; %动量因子maxiter = 1000; %最大迭代次数%% 初始化网络nSampNum = 4;nSampDim = 2;nHidden = 3;nOut = 1;w = 2*(rand(nHidden,nSampDim)-1/2);b = 2*(rand(nHidden,1)-1/2);wex = [w,b];W = 2*(rand(nOut,nHidden)-1/2);B = 2*(rand(nOut,1)-1/2);WEX = [W,B];%%数据SampIn=[0,0,1,1;...0,1,0,1;…1,1,1,1];expected = [0,1,1,0];%%训练iteration = 0;errRec = [];outRec =[];for i = 1:maxiter% 工作信号正向传播hp = wex*SampIn;tau = logsig(hp);tauex = [tau',1*ones(nSampNum,1)]';HM = WEX*tauex;out = logsig(HM);outRec = [outRec,out'];err = expected - out;sse = sumsqr(err);errRec = [errRec,sse];fprintf('第%d 次迭代,误差:%f \n',i,sse);% 判断是否收敛iteration = iteration + 1;if sse <= ebbreak;end% 误差信号反向传播% DELTA 和delta 为局部梯度DELTA = err.*dlogsig(HM,out);delta = W' * DELTA.*dlogsig(hp,tau);dWEX = DELTA*tauex';dwex = delta*SampIn';% 更新权值if i == 1WEX = WEX + eta*dWEX;wex = wex + eta*dwex;elseWEX = WEX + (1-mc)*eta*dWEX + mc*dWEXold;wex = wex + (1-mc)*eta*dwex+mc*dwexold;enddWEXold = dWEX;dwexold = dwex;W = WEX(:,1:nHidden);end%%显示figure(1)grid[nRow,nCol]=size(errRec);semilogy(1:nCol,errRec,'LineWidth',1.5);title('误差曲线');xlabel('迭代次数');x=-0.2:.05:1.2;[xx,yy] = meshgrid(x);for i=1:length(xx)for j=1:length(yy)xi=[xx(i,j),yy(i,j),1];hp = wex*xi';tau = logsig(hp);tauex = [tau',1]';HM = WEX*tauex;out = logsig(HM);z (i,j) =out;endendfigure(2)mesh(x,x,z);figure(3)plot([0,1],[0,1],'*','LineWidth',2);hold onplot([0,1],[1,0],'O','LineWidth',2);[c,h]=contour(x,x,z,0.5,'b');clabel(c,h);legend('0','1','分类面');title('分类面')2.2 误差下降曲线如下图所示:Finger 1010*******400500600700800900100010-210-110误差曲线迭代次数网格上的点在BP 网络映射下的输出如下图:Finger 2异或本质上是一个分类问题,,分类面如图:Finger 3分类面-0.200.20.40.60.81 1.2本文介绍了神经网络的研究背景和现状,分析了目前神经网络研究中存在的问题.然后描述了BP神经网络算法的实现以及BP神经网络的工作原理,给出了BP网络的局限性.本文虽然总结分析了BP神经网络算法的实现,给出了实例分析,但是还有很多的不足.所总结的BP神经网络和目前研究的现状都还不够全面,经过程序调试的图形有可能都还存在很多细节上的问题,而图形曲线所实现效果都还不够好,以及结果分析不够全面、正确、缺乏科学性等,这些都还是需加强提高的.近几年的不断发展,神经网络更是取得了非常广泛的应用,和令人瞩目的发展.在很多方面都发挥了其独特的作用,特别是在人工智能、自动控制、计算机科学、信息处理、机器人、模式识别等众多方面的应用实例,给人们带来了很多应用上到思考,和解决方法的研究.但是神经网络的研究最近几年还没有达到非常热门的阶段,这还需有很多热爱神经网络和研究神经网络人员的不断研究和创新,在科技高度发达的现在,我们有理由期待,也有理由相信.我想在不久的将来神经网络会应用到更多更广的方面,人们的生活会更加便捷.学年论文成绩评定表。
BP神经网络以及径向基网络的研究RBF毕业论文BP神经网络(Backpropagation Neural Network)和径向基网络(Radial Basis Function Network)是常用的神经网络模型,在许多领域都有广泛的研究和应用。
本文将从两个方面分别介绍BP神经网络和径向基网络的研究,并讨论它们的优缺点。
首先是BP神经网络的研究。
BP神经网络是一种前馈式神经网络,具有多层结构,其中包含输入层、隐藏层和输出层。
BP神经网络通过反向传播算法来训练模型,根据输入数据和期望输出之间的误差来调整网络的权重和阈值,使得模型能够逐步优化。
BP神经网络具有灵活的拟合能力和较强的普适性,可以用于解决分类、回归和预测等问题。
在BP神经网络的研究中,一些学者提出了改进的算法和结构来提升其性能。
例如,对于训练速度较慢的问题,可以使用改进的优化算法,如共轭梯度法、遗传算法等,来加速权重和阈值的更新过程。
另外,为了防止过拟合现象,可以使用正则化方法或交叉验证等技术来选择最佳的模型参数。
此外,还可以通过调整隐藏层的节点数和层数等来改进模型的表达能力和泛化能力。
接下来是径向基网络的研究。
径向基网络是一种基于径向基函数的神经网络,通常包括输入层、隐藏层和输出层。
其中隐藏层使用径向基函数作为激活函数,将输入数据映射到高维特征空间中,然后通过线性函数进行分类或回归。
径向基函数具有局部性质和非线性拟合能力,适用于解决非线性问题。
在径向基网络的研究中,一些学者提出了不同的径向基函数和网络结构来适应不同的问题。
例如,高斯函数、多项式函数和多小波函数等都被用作径向基函数的选择。
此外,也有学者研究了递归径向基网络和自适应径向基网络等改进的算法和结构。
这些方法在模型的表达能力和泛化能力方面具有一定的优势。
综上所述,BP神经网络和径向基网络是两种常见的神经网络模型,在研究和应用中具有广泛的应用。
它们分别具有灵活的拟合能力和非线性拟合能力,可以用于解决各种问题。
神经网络激活函数[BP神经网络实现函数逼近的应用分析]神经网络激活函数是神经网络中非常重要的组成部分,它决定了神经网络的非线性特性,并且对于神经网络的求解效果和性能有着重要的影响。
本文将对神经网络激活函数进行详细的分析和探讨,并以BP神经网络实现函数逼近的应用为例进行具体分析。
1.神经网络激活函数的作用(1)引入非线性:神经网络通过激活函数引入非线性,使其具备处理非线性问题的能力,能够更好的逼近任意非线性函数。
(2)映射特征空间:激活函数可以将输入映射到另一个空间中,从而更好地刻画特征,提高神经网络的表达能力,并且可以保留原始数据的一些特性。
(3)增强模型的灵活性:不同的激活函数具有不同的形状和性质,选择合适的激活函数可以增加模型的灵活性,适应不同问题和数据的特点。
(4)解决梯度消失问题:神经网络中经常会遇到梯度消失的问题,通过使用合适的激活函数,可以有效地缓解梯度消失问题,提高神经网络的收敛速度。
2.常用的神经网络激活函数(1)Sigmoid函数:Sigmoid函数是一种常用的激活函数,它的输出值范围在(0,1)之间,具有平滑性,但是存在梯度消失问题。
(2)Tanh函数:Tanh函数是Sigmoid函数的对称形式,它的输出值范围在(-1,1)之间,相对于Sigmoid函数来说,均值为0,更符合中心化的要求。
(3)ReLU函数:ReLU函数在输入为负数时输出为0,在输入为正数时输出为其本身,ReLU函数简单快速,但是容易出现神经元死亡问题,即一些神经元永远不被激活。
(4)Leaky ReLU函数:Leaky ReLU函数是对ReLU函数的改进,当输入为负数时,输出为其本身乘以一个小的正数,可以解决神经元死亡问题。
(5)ELU函数:ELU函数在输入为负数时输出为一个负有指数衰减的值,可以在一定程度上缓解ReLU函数带来的神经元死亡问题,并且能够拟合更多的函数。
3.BP神经网络实现函数逼近的应用BP神经网络是一种常用的用于函数逼近的模型,它通过不断调整权重和偏置来实现对目标函数的拟合。
基于BP神经网络和RBF网络的非线性函数逼近问题比较研究丁德凯摘要:人脑是一个高度复杂的、非线性的和并行的计算机器,人脑可以组织神经系统结构和功能的基本单位,即神经元,以比今天已有的最快的计算机还要快很多倍的速度进行特定的计算,例如模式识别、发动机控制、感知等。
神经网络具有大规模并行、分布式存储和处理、自组织、自适应和自学习,以及很强的非线性映射能力,所以它在函数(特别是非线性函数)逼近方面得到了广泛的应用。
BP神经网络和RBF神经网络,都是非线性多层前向网络,本文分别用BP(Back Propagation)网络和RBF(Radial Basis Function)网络对非线性函数f=sin(t)+cos(t)进行逼近,结果发现后者的学习速度更快,泛化能力更强,而前者的程序设计相对比较简单。
关键词:BP神经网络,RBF神经网络,函数逼近0 引言人工神经网络(Artificial Neural Networks,ANN)[1]是模仿生物神经网络功能的一种经验模型。
生物神经元受到传入的刺激,其反应又从输出端传到相联的其它神经元,输入和输出之间的变换关系一般是非线性的,且对输入信号有功能强大的反应和处理能力。
神经网络是由大量的处理单元(神经元)互相连接而成的网络。
为了模拟大脑的基本特性,在神经科学研究的基础上,提出了神经网络的模型。
但是,实际上神经网络并没有完全反映大脑的功能,只是对生物神经网络进行了某种抽象、简化和模拟。
神经网络的信息处理通过神经元的互相作用来实现,知识与信息的存储表现为网络元件互相分布式的物理联系。
神经网络的学习和识别取决于各种神经元连接权系数的动态演化过程。
神经网络的发展与神经科学、数理科学、认知科学、计算机科学、人工智能、信息科学、控制论、机器人学、微电子学、心理学、微电子学、心理学、光计算、分子生物学等有关,是一门新兴的边缘交叉学科。
当前,它在许多领域有重要的作用。
例如,模式识别和图像处理;印刷体和手写字符识别、语音识别、签字识别、指纹识别、人体病理分析、目标检测与识别、图像压缩和图像复制等。
TAIYUAN UNIVERSITY OF SCIENCE & TECHNOLOGY 基于BP算法函数逼近步骤** : **学号 : S*********班级 : 研1507基于BP算法函数逼近步骤一、BP神经网络算法:BP(Back Propagation)网络是是一种按误差逆向传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。
BP网络能学习和存贮大量的输入-输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。
它的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小。
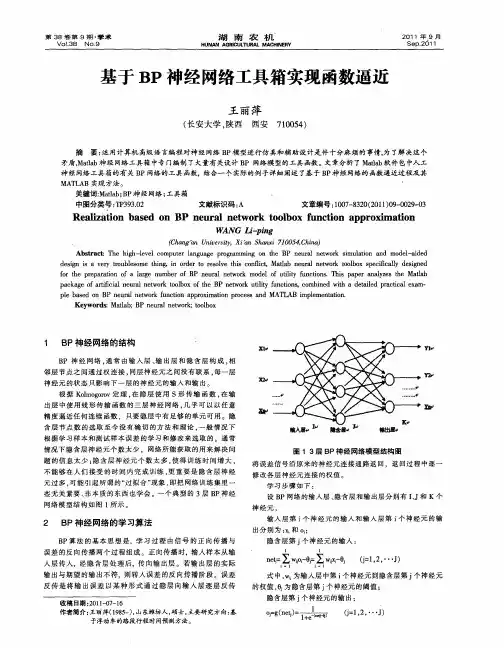
BP神经网络模型拓扑结构包括输入层、隐含层和输出层。
输入层各神经元负责接收来自外界的输入信息,并传递给中间层各神经元;中间层是内部信息处理层,负责信息变换,根据信息变化能力的需求,中间层可以设计为单隐含层或者多隐含层结构;最后一个隐含层传递到输出层各神经元的信息,经进一步处理后,完成一次学习的正向传播处理过程,由输出层向外界输出信息处理结果。
当实际输出与期望输出不符时,进入误差的反向传播阶段。
误差通过输出层,按误差梯度下降的方式修正各层权值,向隐含层、输入层逐层反传。
周而复始的信息正向传播和误差反向传播过程,是各层权值不断调整的过程,也是神经网络学习训练的过程,此过程一直进行到网络输出的误差减少到可以接受的程度,或者预先设定的学习次数为止。
二、BP学习算法的计算步骤概述BP算法的基本原理是梯度最速下降法,它的中心思想是调整权值使网络总误差最小。
运行BP学习算法时,包含正向和反向传播两个阶段。
(1)正向传播输入信息从输入层经隐含层逐层处理,并传向输出层,每层神经元的状态只影响下一层神经元的状态。
(2)反向传播将误差信号沿原来的连接通道返回,通过修改各层神经元的权值,使误差信号最小。
学习过程是一种误差边向后传播边修正权系数的过程。
隐层的反传误差信号为jk Mk k j i w I f ∑=⋅=1')(δδ由此可得,隐层权值的修正公式为:i Mk jk k j ij O w I f w ⋅⋅=∆∑=)()(1'δη或iMk jk k j j ij O w O O w ⋅⋅-=∆∑=)()1(1δη四、程序代码w10=[0.1 0.2;0.3 0.15;0.2 0.4]; w11=[0.2 0.1;0.25 0.2;0.3 0.35]; w20=[0.2;0.25;0.3]; w21=[0.15;0.2;0.4];q0=[0.1 0.2 0.3]; q1=[0.2 0.15 0.25]; p0=0.2;p1=0.1; xj=[0.5;0.9]; k1=5;k2=1200; e0=0;e1=0;e2=0; for s=1:72yp1=cos(2*3.14*k1*s/360); for k=1:k2 for i=1:3x=w11(i,1)*xj(1,:)+w11(i,2)*xj(2,:); z=x+q1(:,i); o=[1-exp(-z)]/[1+exp(-z)]; m=1/[1+exp(-z)]; m1(i,:)=m; o1(i,:)=o; end for i=1:3 yb=0;yb=yb+w21(i,:)*o1(i,:); endyi=yb+p1; n=1/[1+exp(-yi)];y=[1-exp(-yi)]/[1+exp(-yi)]; e0=e1; e1=e2; e2=[(yp1-y).^2]/2; xj1=e2-e1; xj2=e2-2*e1+e0; xj=[xj1;xj2];d2=n*(1-y)*(yp1-y);bk=d2; for i=1:3u=w21(i,:)*bk;d1=[1-o1(i,:)]*u;d0=m1(i,:)*d1;qw=q1(:,i)-q0(:,i);q2=q1(:,i)+0.8*d0+0.4*qw;q3(:,i)=q2;for j=1:2dw=w11(i,j)-w10(i,j);w12=w11(i,j)+0.8*d0*xj(j,:)+0.6*dw; w13(i,j)=w12;endendw10=w11;w11=w13;q0=q1;q1=q3;for i=1:3h=w21(i,:)-w20(i,:);w22=w21(i,:)+0.4*d2*o1(i,:)+0.75*h;w23(i,:)=w22;endw20=w21;w21=w23;ph=p1-p0;p2=p1+0.9*d2+0.6*ph;p0=p1;p1=p2;if e2<0.0001,break;else k=k+1;endende(s)=e2;ya(s)=yp1;yo(s)=y;s=s+1;ends1=s-1;s=1:s1;plot(s,ya,s,yo,'g.',s,e,'rx');title('BP');五、运行结果1.此次逼近的函数为y=cosx,蓝色为真实的余弦曲线,绿色为逼近的余弦曲线,红色代表误差曲线,从图像上可以得出逼近结果与原曲线契合程度高,效果良好。
BP神经网络泛化能力改进研究BP神经网络是一种常见的深度学习模型,具有强大的非线性映射能力和自适应学习能力。
然而,在面对复杂多变的应用场景时,BP神经网络的泛化能力常常受到挑战。
泛化能力是指模型在训练集之外的新数据上的表现,对于模型的实用性和可靠性至关重要。
因此,提高BP神经网络的泛化能力具有重要意义。
BP神经网络是一种反向传播神经网络,通过反向传播算法调整网络参数,使得网络的输出逐渐接近目标值。
在训练过程中,模型不断地学习训练数据的特征,并尝试对未见过的新数据进行预测。
然而,传统的BP神经网络容易受到过拟合、欠拟合等问题的影响,导致泛化能力不佳。
为了提高BP神经网络的泛化能力,许多研究从模型结构、正则化、优化算法等方面进行了探索。
例如,卷积神经网络通过引入卷积层和池化层,有效地提取了图像等数据的局部特征,提高了模型的泛化能力。
Dropout技术通过在训练过程中随机丢弃部分神经元,有效地避免了过拟合问题。
正则化技术如LL2正则化和early stopping,通过约束模型复杂度,提高模型的泛化能力。
本文从数据增强和集成学习的角度出发,提出了一种改进BP神经网络泛化能力的方法。
具体方法如下:数据增强:通过随机旋转、缩放、平移等方式,对训练数据进行变换,增加模型的鲁棒性和泛化能力。
集成学习:将多个BP神经网络模型进行组合,通过投票或加权平均的方式,得到更具有泛化能力的模型。
优化算法:采用随机梯度下降(SGD)等优化算法,以及动量项和自适应学习率等技术,加快训练速度并提高模型性能。
实验材料包括公共数据集MNIST和CIFAR-10,以及自建数据集。
实验中采用多种评估指标,如准确率、召回率和F1值等,对模型的性能进行全面评估。
实验结果表明,经过数据增强和集成学习处理的BP神经网络模型,在MNIST和CIFAR-10数据集上均取得了显著的性能提升。
具体来说,通过数据增强技术,模型对于训练数据的各种变换具有较强的鲁棒性,有效提高了模型的泛化能力。
基于BP神经网络算法的函数逼近神经网络是一种基于生物神经元工作原理构建的计算模型,可以通过学习和调整权重来逼近非线性函数。
其中,基于误差反向传播算法(BP)的神经网络是最常见和广泛应用的一种,其能够通过反向传播来调整网络的权重,从而实现对函数的近似。
BP神经网络的算法包括了前馈和反向传播两个过程。
前馈过程是指输入信号从输入层经过隐藏层传递到输出层的过程,反向传播过程是指将网络输出与实际值进行比较,并根据误差来调整网络权重的过程。
在函数逼近问题中,我们通常将训练集中的输入值作为网络的输入,将对应的目标值作为网络的输出。
然后通过反复调整网络的权重,使得网络的输出逼近目标值。
首先,我们需要设计一个合适的神经网络结构。
对于函数逼近问题,通常使用的是多层前馈神经网络,其中包括了输入层、隐藏层和输出层。
隐藏层的神经元个数和层数可以根据具体问题进行调整,一般情况下,通过试验和调整来确定最优结构。
然后,我们需要确定误差函数。
对于函数逼近问题,最常用的误差函数是均方误差(Mean Squared Error)。
均方误差是输出值与目标值之间差值的平方和的均值。
接下来,我们进行前馈过程,将输入值通过网络传递到输出层,并计算出网络的输出值。
然后,我们计算出网络的输出与目标值之间的误差,并根据误差来调整网络的权重。
反向传播的过程中,我们使用梯度下降法来最小化误差函数,不断地调整权重以优化网络的性能。
最后,我们通过不断训练网络来达到函数逼近的目标。
训练过程中,我们将训练集中的所有样本都输入到网络中,并根据误差调整网络的权重。
通过反复训练,网络逐渐优化,输出值逼近目标值。
需要注意的是,在进行函数逼近时,我们需要将训练集和测试集分开。
训练集用于训练网络,测试集用于评估网络的性能。
如果训练集和测试集中的样本有重叠,网络可能会出现过拟合现象,导致在测试集上的性能下降。
在神经网络的函数逼近中,还有一些注意事项。
首先是选择适当的激活函数,激活函数能够在网络中引入非线性,使网络能够逼近任意函数。