7 Frequency Response Methods2013(频率响应方法)
- 格式:ppt
- 大小:2.04 MB
- 文档页数:71
频率响应法一、概述频率响应法(Frequency Response Method)是一种用于分析和设计线性时不变系统的方法。
它通过研究系统对不同频率的输入信号的响应来揭示系统的特性和行为。
频率响应法广泛应用于信号处理、控制系统、通信系统等领域。
二、频率响应的基本概念2.1 频率响应函数频率响应函数是描述系统对不同频率输入信号响应的函数。
通常用H(ω)表示,其中ω为角频率。
频率响应函数可以分为幅频特性和相频特性两个部分。
2.2 幅频特性幅频特性描述了系统对不同频率输入信号的幅度变化情况。
常见的表示幅频特性的方法有Bode图和Nyquist图。
Bode图将系统的增益和相位角随频率变化的曲线绘制在共享横轴的图上,直观地展示了系统的频率响应特性。
Nyquist图则是将系统的频率响应绘制在复平面上,可以用于分析系统的稳定性和相位裕度等指标。
2.3 相频特性相频特性描述了系统对不同频率输入信号的相位差变化情况。
相频特性通常用Bode图来表示,通过绘制系统的相位角随频率变化的曲线,可以分析系统的相位延迟、相位裕度等指标。
三、频率响应法的应用3.1 系统分析频率响应法可以用于对系统进行稳定性分析、频率特性分析等。
通过分析系统的频率响应曲线,可以判断系统是否稳定、是否存在共振现象,从而指导系统的设计和调整。
3.2 控制系统设计频率响应法在控制系统的设计中起到重要作用。
通过分析系统的频率响应特性,可以选择合适的控制器参数,设计出满足性能要求的控制系统。
3.3 信号处理在信号处理领域,频率响应法广泛应用于滤波器设计和信号增强等方面。
通过分析信号在系统中的频率响应,可以设计出满足要求的滤波器,对信号进行有效处理和增强。
3.4 通信系统频率响应法在通信系统中的应用也非常广泛。
通过分析通信系统的频率响应特性,可以优化系统的传输性能,提高信号的传输质量和可靠性。
四、频率响应法的优缺点4.1 优点•频率响应法可以直观地展示系统的频率响应特性,便于分析和设计。
浅谈耳机频响曲线及其作用对于非耳机行业的朋友来说频响曲线大家觉得比较陌生且较神秘。
大家也喜欢说的一句话,管它什么曲线,耳朵收货即可。
其实对于不是从事此行业的朋友,没兴趣的话其实没必要学浪费时间去了解自己不喜欢的东西,有兴趣的话多了解一些也没什么坏处。
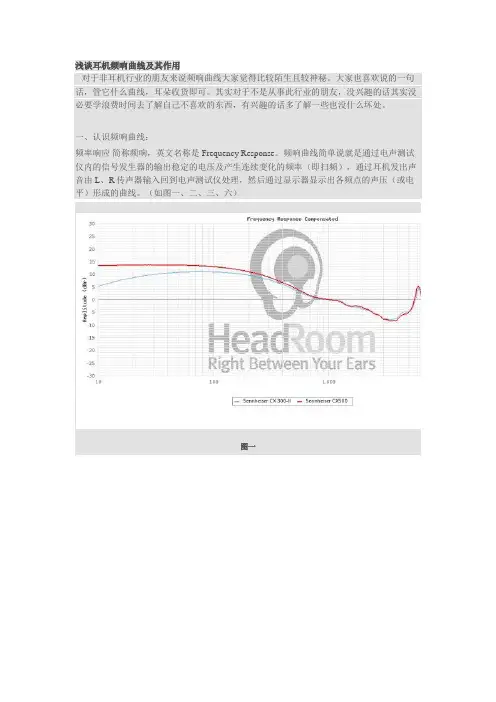
一、认识频响曲线:频率响应简称频响,英文名称是Frequency Response。
频响曲线简单说就是通过电声测试仪内的信号发生器的输出稳定的电压及产生连续变化的频率(即扫频),通过耳机发出声音由L、R传声器输入回到电声测试仪处理,然后通过显示器显示出各频点的声压(或电平)形成的曲线。
(如图一、二、三、六)图一图二图三国际电工委员会IEC581-10标准中高保真耳机频率响应不小于50Hz--12500Hz。
目前市场上的耳机基本上频率响应范围20-20KHZ,有些优秀的耳机甚至达到6-51KHZ(Sennheiser HD800)。
人耳能听到的频率范围20-20KHZ,低于20HZ次声波,高于20KHZ超声波,超出20-20KHZ人耳不易察觉。
我们常说耳机低、中、高三频,根据国际电工协会IEC581-10标准,和我国的GB/T14277-93国家标准, 频段划分为: 30-150Hz为低频段, 150-500Hz为中低频段, 500-5KHz为中高频段, 5K-16KHz高频段。
在20-20kHZ中如果细分可为7个频段,分别:极低频、低频、中低频、中频、中高频、高频、极高频。
耳机各乐器和人声对应频率范围见如下图(图四),从下图可看出,低频比较典型的乐器大鼓,延伸到高频乐器如钢琴、管风琴、小提琴等等,还有乐器的泛音也是落在高频。
中频范围比较广,人声,乐器的基音基本上落在中频,而且是会相互影响。
图四二、简单看频响曲线:图五1.以上是最常见的频响曲线图(如图五),首先简单介绍一下耳机电声测试仪,不管是丹麦B&K还是国产电声测试仪(原浙大电声测试仪),功能都非常齐全,可以测试很多项目,两者精度也相差很小,比如说B&K与吉高电声测试仪误差约0.5-1dB。
加速度传感器主要技术指标1. 测量范围(Measurement Range):加速度传感器能够测量的加速度的范围。
常见的测量范围从几个g到几百g不等,其中1g等于地球上的重力加速度9.8m/s²。
2. 分辨率(Resolution):加速度传感器能够区分的最小加速度变化。
通常以m/s²或g为单位。
3. 灵敏度(Sensitivity):加速度传感器输出信号相对于输入加速度的变化率,常以mV/g或mV/m/s²表示。
灵敏度越高,传感器对于微小加速度的响应越快。
4. 零点偏移(Zero Offset):在没有加速度作用下,传感器输出的信号不为零。
零点偏移指的是传感器输出信号与零点之间的差值。
通常以mV为单位。
5. 频率响应(Frequency Response):加速度传感器能够测量的加速度变化的频率范围。
常见的频率范围从几Hz到几千Hz不等。
6. 噪声(Noise):传感器输出信号的不确定性。
传感器噪声越小,对于微小加速度的测量越精确。
7. 非线性度(Nonlinearity):传感器输出信号与输入加速度之间的偏差。
常表示为百分比或者以g为单位。
8. 温度稳定性(Temperature Stability):传感器在不同温度下的输出信号的变化范围。
温度稳定性越好,传感器的测量精度越高。
9. 动态测量范围(Dynamic Range):加速度传感器能够测量的最大加速度和最小加速度之间的比值。
动态测量范围越大,传感器能够测量的加速度范围越宽。
10. 失真(Distortion):因非线性效应导致的传感器输出信号与实际加速度之间的偏差。
失真常以百分比表示。
此外,加速度传感器还可能具有以下特殊技术指标:11. 反向振动抑制特性(Anti-vibration Characteristics):传感器在高频振动环境下的稳定性能。
反向振动抑制特性好的传感器能够减小振动对于测量结果的影响。
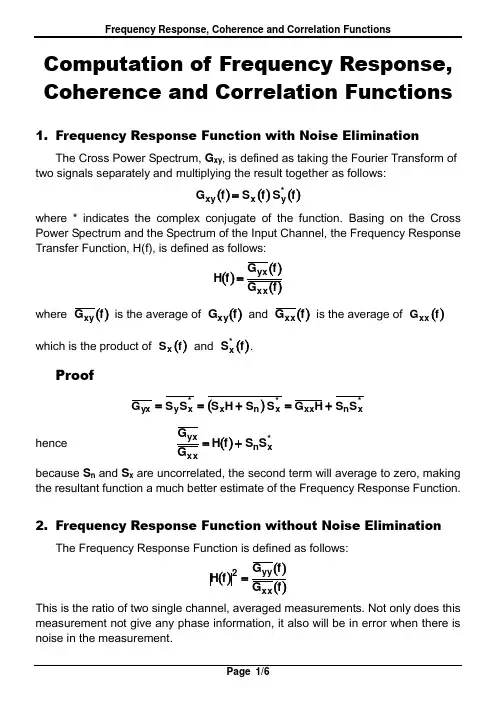
Computation of Frequency Response, Coherence and Correlation Functions1. Frequency Response Function with Noise EliminationThe Cross Power Spectrum, G xy , is defined as taking the Fourier Transform of two signals separately and multiplying the result together as follows:()()()f S f S f G *y x xy =where * indicates the complex conjugate of the function. Basing on the CrossPower Spectrum and the Spectrum of the Input Channel, the Frequency Response Transfer Function, H(f), is defined as follows:()()()f G f H xx yx =where ()f G xy is the average of ()f G xy and ()f G xx is the average of ()f G xx which is the product of ()f S x and ()f S *x .Proofx n xx x n x x y yx S S S S H S S S +=+==hence()*x n xxyx S S f H G +=because S n and S x are uncorrelated, the second term will average to zero, makingthe resultant function a much better estimate of the Frequency Response Function.2. Frequency Response Function without Noise EliminationThe Frequency Response Function is defined as follows:()()()f f G f H xx yy 2=This is the ratio of two single channel, averaged measurements. Not only does this measurement not give any phase information, it also will be in error when there is noise in the measurement.ProofWith reference to following figure above, the output is:()()()()f S f H f S f S n x y +=hence2n n *x n x 2xx *y y yy S S *H S S H S H G S S G +++==In order to eliminate the noise, the RMS is averaged and the S x S n terms approach zero because S x and S n are uncorrelated. The 2n S term remains as an error and the Frequency Response Function becomes:xx2n2xxyy G S H G G +=Therefore, if the Frequency Response Function 2H is measured by this single channel technique, the accuracy of the measured value will be strongly influencedby the high by the noise to signal ratio.The Coherence Function, γ2, is derived from the Cross Power Spectrum by:()()()()()f G f G f G f G f yy *xy xx yx 2=γThe coherence function is a measure of the power in the output signal caused by the input. If the coherence is 1, then all the output power is caused by the input. If the coherence is 0, then none of the output is caused by the input.Influence of NoiseWith reference to above figure,2n **x*nx 2xx xy S S H S S H S H G G +++=*x n xx xy S S H G G +=Basing on the assumption that the signal and the noise are not related and by averaging the terms, the cross terms S n S x approach zero. Therefore the coherence function becomes:()()⎪⎭⎫⎝⎛+=γ2n xx 2xx 2yx 2S H G H f()2nxx 2xx 22S G H G H f +=γIf there is no noise, the coherence function is unity. If there is noise, then the coherence function will be reduced. Note also that the coherence function is a function of frequency. The coherence function can be unity at frequencies where there is no interference and low where the noise is high.Auto Correlation FunctionThe auto correlation function, R xx (τ), is a comparison of a signal with itself as a function of time shift. It is defined as:()()()⎰ττ-=τ∞→T T xx d t x t x T1R LimThat is, the auto correlation function can be found by taking a signal andmultiplying it by the same signal displaced by a time and averaging the product over all time. Alternatively, the auto correlation function can be computed as follows:()()(){}f S f S F R *x x 1xx -=τwhere F -1 is the inverse Fourier Transform and S is the Fourier transform of x(t).Cross Correlation FunctionThe cross correlation function, R xy (τ), is a computation of two signals as a function of a time shift between them. It is defined as:()()()⎰ττ-=τ∞→T T xy d t y t x T1R LimSimilarly, the cross correlation function can be computed from the cross powerspectrum, i.e.,()(){}f G F R xy 1xy -=τ4. Different Forms of Frequency Response FunctionsDifferent Forms of Frequency Responses4.Flow Chart of Frequency Response FunctionsDetermination6. Example of Frequency Response Function (FRF) PlotPlot of FRF vs U (mean wind speed) vs f (first 6 lateral flexural deck frequencies).。
8. Frequency Response Methods(频率分析法)本章主要知识点、重点:1、频率特性的概念(The Concept of Frequency Response):幅频特性(Magnitude),相频特性(Phase);2、系统开环频率特性的绘制:极坐标图(polar plot )or 奈氏曲线(Nyquist ),伯德图(Bode Diagram ),对数幅频特性(Log Magnitude Diagram),对数相频特性(Log Phase Diagram);3、系统闭环频率特性与性能指标的关系(Performance Specifications In The Frequency Domain ):谐振频率(r ω)、谐振峰值(p M ω)、带宽(B ω)时域法:列写微分方程,拉氏变换,拉氏反变换,得y(t); 性能指标:Tr , Tp , Ts , P.O% 频率(域)法(1)克服系统分析上的困难;(2) 便于研究系统结构、参数变化对系统性能的影响; (3)频率法特性可通过实验获得; (4)图解法直观。
频率响应法的基本思想,是把控制系统中的各个变量看成是一些信号,而这些信号又是由许多不同频率的正弦信号合成的;各个变量的运动就是系统对各个频率的信号的响应的总合。
起源于通讯科学---音频、视频等是由不同频率正弦信号合成的,并以此观点进行处理和传递。
20世纪30年代引入控制科学,对控制理论发展起了强大推动作用,克服了直接用微分方程的种种困难,解决了许多理论和工程问题,迅速形成了分析和综合控制系统的一整套方法,是控制理论中极为重要的内容。
按频率响应的观点:一个控制系统的运动,无非是信号在一个一个环节之间依次传递,每个信号又是不同频率的正弦信号合成的,这些不同频率的正弦信号的振幅和相角在传递过程中,依一定的函数关系变化,就产生形式多样的运动。
近年来,还发展到可以应用于多输入多数出系统的多变量频域理论。
专业名词--专业英语-信号处理导论专业名词总结部分1.A/D conversion [eɪ] [diː][kən'vɜːʃ(ə)n]模数转换指为把数字信号转换为信息基本相同的模拟信号而设计的处理过程。
2.adder ['ædə]加法器加法器是产生数的和的装置。
加数和被加数为输入,和数与进位为输出的装置为半加器。
若加数、被加数与低位的进位数为输入,而和数与进位为输出则为全加器。
3.additive gauss white noise ['ædɪtɪv][gaʊs] [waɪt] [nɒɪz]加性高斯白噪声加性高斯白噪声指的是一种各频谱分量服从均匀分布(即白噪声),且幅度服从高斯分布的噪声信号。
因其可加性、幅度服从高斯分布且为白噪声的一种而得名。
4.aliasing ['eliəsɪŋ]混叠频混现象又称为频谱混叠效应,它是指由于采样信号频谱发生变化,而出现高、低频成分发生混淆的一种现象。
5.all-pass function ['ɔl,pæs] ['fʌŋ(k)ʃ(ə)n] 全通函数全通函数是凡极点位于左半开平面,零点位于右半开平面,并且所有零点与极点对于虚轴为一一镜像对称的系统函数。
6.amplifier ['æmplɪfaɪə] 放大器是指能够使用较小的能量来控制较大能量的任何器件。
7.amplitude ['æmplɪtjuːd]振幅指振动物体离开平衡位置的最大距离。
8.analog signal ['ænəlɒɡ] ['sɪgn(ə)l]模拟信号指信息参数在给定范围内表现为连续的信号。
或在一段连续的时间间隔内,其代表信息的特征量可以在任意瞬间呈现为任意数值的信号。
9.antialiasing profiler [,ænti'eliəsɪŋ] ['prəufailə] 抗混叠预滤波器指一种用以在输出电平中把混叠频率分量降低到微不足道的程度的低通滤波器。
信号与系统常用词汇中英文对照表序号英文词汇中文翻译1 Absolutely summable impulse response 绝对可与的冲激响应2 Absolutely integrable impulse response 绝对积的冲激响应3 Accumulation property 累加性质4 Adder 加法器5 Additivity 可加性6 Aliasing 混叠7 Allpass system 全通系统8 Amplitude Modulation(AM)幅度调制9 Amplifier 放大器10 Analog-to-Digital Conversion 模数转换11 Analysis equation 分析方程12 Aperiodic signal 非周期性信号13 Associative property 结合性质14 Audio system 音频系统15 Autocorrelation function 自相关函数16 Band-limited signal 带限信号17 Band—limited interpolation 带限内插18 Bandpass filter 带通滤波器19 Bandpass-sampling technique 带通抽样方法20 Bandpass signal 带通信号21 Bandwidth of an LTI system 线性时不变系统的带宽22 Bilinear transformation 双线性变换23 Block diagram 方框图24 Bode plot 波特图25 Butterworth filter 巴特沃斯滤波器26 Carrier frequency 载波频率27 Carrier signal 载波信号28 Cartesian (rectangular)form for complex number 复数的笛卡尔(直角坐标)形式29 Cascade—form block diagram 级联型方框图30 Cascade (series) interconnection 级联连接31 Causal LTI system 因果的线性时不变系统32 Channel equalization 信道均衡33 ”””Chirp”" transform algorithm"线性调频变换算法34 Closed-loop system 闭环系统35 Coefficient multiplier 系数乘法器36 Communication system 通信系统37 Commutative property 交换性质38 Complex conjugate 复共轭39 Complex exponential 复指数40 Complex number 复数41 Continuous-time signal 连续时间信号42 Conjugate symmetry 共轭对称性43 Conjugation property 共轭性质44 Continuous—time Fourier series 连续时间傅里叶级数45 Continuous—time Fourier transform 连续时间傅里叶变换46 Continuous—time system 连续时间系统47 Convolution integral 卷积积分48 Convolution sum 卷积与49 Correlation function 相关函数50 Cross-correlation function 互相关函数51 Cutoff frequency 截止频率52 Digital signal 数字信号53 Demodulation 解调54 Discrete-time 离散时间55 Discrete—time Fourier series 离散傅里叶级数56 Distributive property 分配性质57 Damped sinusoid 阻尼正弦波58 Damping ratio 阻尼比59 DC offset 直流偏置60 Decibel (dB) 分贝61 Delay 延迟62 Delay time 延时63 Difference 差分64 Discrete—time Fourier series 离散时间傅里叶级数65 Discrete—time Fourier transform 离散时间傅里叶变换66 Differential equation 微分方程67 Differentiation 微分68 Digital-to-Analog converter 数模转换器69 Direct FormⅠrealization 直接Ⅰ型实现70 Direct FormⅡrealization 直接Ⅱ型实现71 Dirichlet conditions 狄里赫利条件72 Discontinuity 不连续73 Discrete—time Modulation 离散时间调制74 Discrete-time signal 离散时间信号75 Decimation 抽取76 Discrete—time system 离散时间系统77 Distortion 失真78 Distributive property 分配性质79 Double—sideband modulation 双边带调制80 Downsampling 降率抽样81 Duality 对偶性82 Eigenfunction 特征函数83 Eigenvalue 特征值84 Elliptic filter 椭圆滤波器85 Energy-density spectrum 能量密度谱86 Envelope 包络线87 Equalization 均衡88 Euler’s relation欧拉关系89 Exponential 指数函数90 Fast Fourier Transform (FFT)快速傅里叶变换91 Feedback 反馈92 Feedback interconnection 反馈互联93 Filter 滤波器94 Finite Impulse Response (FIR) 有限冲激响应95 Forward path 前向通路96 Frequency—selective 频率选择97 Frequency-shaping 频率整形98 Final—value theorem 终值定理99 Finite-duration signal 有限持续时间信号,100 First harmonic component 一次谐波分量101 First-order continuous—time system 一阶连续时间系统102 First—order discrete-time system 一阶离散时间系统103 Forced response 强迫响应104 Frequency-Division Multiplexing (FDM)频分复用105 Frequency response 频率响应106 Frequency scaling 频率尺度变换107 Frequency shifting property 频移性质108 Fundamental frequency 基本频率109 Fundamental period 基本周期110 Gain 增益111 General complex exponential 普通的复指数函数112 Generalized function 广义函数113 Gibbs phenomenon 吉布斯现象114 Group delay 群延时115 Hanning window 汉宁窗116 Harmonic analyzer 谐波分析器117 Harmonic component 谐波分量118 Highpass filter 高通滤波器119 Hilbert transform 希尔伯特变换120 Ideal frequency-selective filter 理想频率选择滤波器121 Image processing 图像处理122 Imaginary part 虚部123 Impulse response 冲激响应124 Impulse train 冲激串125 Impulse—train sampling 冲激串抽样126 Incrementally linear system 增量线性系统127 Independent variable 独立变量,自变量128 Infinite Impulse Response (IIR)无限冲激响应129 Initial—value theorem 初值定理130 Instantaneous frequency 瞬时频率131 Integral 积分132 Integration property 积分性质133 Integrator 积分器134 Interconnection 互联135 Linear Time Invariant (LTI) system 线性时不变系统136 Interpolation 内插137 Inverse Fourier transform 逆傅里叶变换138 Inverse Laplace transform 逆拉普拉斯变换139 Inverse system 逆系统140 Inverse z—transform 逆z变换141 Laplace transform 拉普拉斯变换142 Left-half plane 左半平面143 Left—sided signal 左边信号144 Linear constant-coefficient differential equation 线性常系数微分方程145 Linear constant-coefficient difference equation 线性常系数差分方程146 Finite Impulse Response (FIR) 有限冲激响应147 Linear feedback system 线性反馈系统148 Linear interpolation 线性内插149 Linearity 线性150 Lowpass filter 低通滤波器151 Lowpass-to—highpass transformation 低通到高通的转换152 Magnitude of complex number 复数的幅值153 Matched filter 匹配滤波器154 Memoryless system 无记忆系统155 Modulating signal 调制信号156 Modulation 调制157 Modulation index 调制指数158 Modulation property 调制性质159 Multiplexing 多路复用160 Multiplication 乘法161 Natural frequency 自然频率162 Natural response 自然响应163 Negative feedback 负反馈164 Network 网络165 Noncausal system 非因果系统166 Nonideal filter 非理想滤波器167 Nonrecursive filter 非递归滤波器168 Normalized function 归一化函数169 Nyquist frequency 奈奎斯特频率170 Nyquist rate 奈奎斯特速率171 Operational amplifier 运算放大器172 Orthogonal function 正交函数173 Orthogonal signal 正交信号174 Oversampling 过抽样175 Parallel interconnection 并联连接176 Parseval’s relation帕塞瓦尔关系177 Partial-fraction expansion 部分分式展开178 Passband frequency 通带频率179 Passband ripple 通带纹波180 Periodic complex exponential 周期性复指数181 Periodic convolution 周期卷积182 Periodic signal 周期信号183 Power 功率184 Periodic square wave 周期性方波185 Periodic train of impulses 周期性冲激串186 Phase lag 相位滞后187 Phase lead 相位超前188 Phase modulation 相位调制189 Phase shift 相移190 Polar form for complex number 复数的极坐标形式191 Pole 极点192 Pole-zero plot 零极点图193 Power of signal 信号的功率194 Power-series expansion method 幂级数展开法195 Principal—phase function 主值相位函数196 Proportional feedback system 比例反馈系统197 Real part 实部198 Rectangular pulse 矩形脉冲199 Rectangular window 矩形窗200 Recursive filter 递归滤波器201 Region of Convergence (ROC) 收敛域202 Rational function 有理函数203 Right-sided signal 右边信号204 Right-sided sequence 右边序列205 Right—half plane 右半平面206 Rise time 上升时间207 Root—locus analysis 根轨迹分析法208 Running sum 流动与209 Sampled—data feedback system 抽样数据反馈系统210 Sampling frequency 抽样频率211 Sampling function 抽样函数212 Sampling period 抽样周期213 Sampling theorem 抽样定理214 Scaling (homogeneity) property 比例(齐次)性215 Scaling in the z-domain Z域尺度变换216 Second harmonic component 二次谐波分量217 Second-order system 二阶连续时间系统218 Series (cascade)interconnection 串联(级联)连接219 Sifting property 筛选性质220 shifting property in the s—domain s域移位性质221 Single—sideband sinusoidal amplitude modulation 单边带正弦幅度调制222 Singularity function 奇异函数223 Synchronous 同步的224 Sinusoidal frequency modulation 正弦频率调制225 Sinusoidal signal 正弦信号226 Sliding 滑动227 Square wave 方波228 Step-invariant transformation阶跃响应不变变换法229 Step response 阶跃响应230 Stopband edge 阻带边缘231 Stopband frequency 阻带频率232 Stopband ripple 阻带纹波233 Sufficiency 充分性234 Summer 加法器235 Superposition property 叠加性质236 Symmetry 对称性237 Synthesis equation 综合方程238 System function 系统函数239 Stability 稳定性240 Taylor series 泰勒级数241 Time constant 时间常数242 Time delay 时延243 Time—Division Multiplexing (TDM) 时分复用244 Time-domain 时域的245 Time reversal property 时间翻转性质246 Time scaling 时间尺度变换247 Time shifting property 时移性质248 Time window 时间窗249 Transition band 过渡带250 Triangular window 三角窗251 Trigonometric series 三角级数252 Undamped natural frequency 无阻尼自然频率253 Undamped system 无阻尼系统254 Underdamped system 欠阻尼系统255 Unilateral Laplace transform 单边拉普拉斯变换256 Unilateral z transform 单边Z变换257 Unit circle 单位圆258 Unit delay 单位延时259 Unit doublet 单位冲激偶260 Unit impulse 单位冲激261 Unit impulse response 单位冲激响应262 Upsampling 升率抽样263 Variable 变量264 Vestigial sideband modulation 残留边带调制265 Voltage 电压266 Wideband 宽带267 Window function 窗函数268 Windowing 加窗269 Wireless 无线的270 Weighted average 加权平均271 Wavelength 波长272 Zero-input response 零输入响应273 Zero-state response 零状态响应274 Zero location 零点位置275 Zero-order hold 零阶保持器。
U n i t1E x e r c i s e s(1)T r a n s l a t e t h e f o l l o w i n g s e n t e n c e s i n t o C h i n e s e.1.As with series resonance, the greater the resistance in thecircuit the lower the Q and, accordingly, the flatter andbroader the resonance curve of either line current or circuitimpedance.对于串联谐振,电路中的电阻愈大Q值就愈低,相应地线路电流或电路阻抗的谐振曲线也就愈平、愈宽。
2.A wire carrying a current looks exactly the same and weighsexactly the same as it does when it is not carrying a current.一根带电的导线其外表与重量都与不带电导线完全一样。
3.Click mouse on the waveform and drag it to change the pulserepetition rate, or directly enter a new value of the period inthe provided dialogue box, while keeping the pulse widthunchanged.在波形上点击鼠标并拖动来改变脉冲重复频率,或者在提供的对话框中直接输入新的期值,而保持脉冲宽度不变。
4.Electronics is the science and the technology of the passage of charged particles in a gas, in a vacuum, or in a semiconductor. Please note that particle motion confined within a metal only is not considered electronics.电子学是一门有关带电粒子在气体、真空或半导体中运动的科学技术。
加速度传感器原理结构使用说明校准和参数解释加速度传感器(Accelerometer)是一种用于测量物体加速度的传感器。
它的原理基于牛顿力学中的惯性原理,即物体的加速度与作用在物体上的力成正比,反向与物体的质量成反比。
下面将详细介绍加速度传感器的原理、结构、使用说明、校准和参数解释。
一、原理:加速度传感器的原理基于微机电系统(MEMS)技术或压电效应。
在MEMS加速度传感器中,通常使用微小的质量(如悬臂梁、微弹簧等)和微型电容或电阻来测量物体的加速度。
当物体加速度改变时,微小的质量会相对于传感器的壳体发生位移,从而改变传感器内部的电容或电阻值。
通过测量电容或电阻值的变化,就可以计算出物体的加速度。
在压电式加速度传感器中,传感器内部包含压电材料,当物体加速度改变时,压电材料会产生电荷,通过测量电荷的大小,可以计算出物体的加速度。
二、结构:加速度传感器的结构通常包括感应质量(Mass)、感应结构(Spring)、感应电容或电阻、壳体等部分。
感应质量是传感器内部的微小质量,感应结构用于支撑感应质量并产生位移,感应电容或电阻用于测量感应质量的位移,壳体则用于保护传感器内部的结构。
三、使用说明:1.安装:将加速度传感器固定在需要测量加速度的物体上,确保传感器与物体之间的接触良好,并且传感器的测量轴与物体的加速度方向一致。
2.供电:连接传感器的供电电源,通常为直流电源或电池。
3.输出:连接传感器的输出接口,获取传感器的加速度数据。
常见的输出接口包括模拟电压输出、数字串行接口(如I2C、SPI等)等。
4.数据处理:将传感器输出的原始数据进行处理,根据传感器的校准参数将原始数据转换为实际的加速度值。
5.数据分析:根据需要对加速度数据进行分析,如计算速度、位移、碰撞检测等。
四、校准:1.静态校准:将传感器放置在水平平稳的表面上,采集传感器输出的静态加速度数据,并与真实的重力加速度(9.8m/s²)进行比较,通过调整传感器的校准参数,使得传感器输出的静态加速度数据接近真实的重力加速度。
目次前言 (Ⅱ)1范围 (1)2规范性引用文件 (1)3术语和定义 (1)4检测原理 (2)5检测仪器的要求 (2)6检测方法 (3)7绕组变形的分析判断 (3)附录A(规范性附录)用相关系数R辅助判断变压器绕组变形 (6)附录B(资料性附录)变压器绕组变形的典型幅频响应特性曲线 (7)I前言本标准是根据原国家经贸委《关于确认1999年度电力行业标准制、修订计划项目的通知》(国经贸电力[1999]40号)安排制定的,目的是规范和指导电力变压器绕组变形频率响应分析法(不包括低压脉冲法)的现场应用。
用频率响应分析法检测变压器绕组变形具有检测灵敏度高、现场使用方便、可在变压器不吊罩的情况下判断变压器绕组变形等优点,现已在电力行业广泛应用。
本标准的附录A为规范性附录,附录B为资料性附录。
本标准由中国电力企业联合会提出。
本标准由电力行业高压试验技术标准化技术委员会归口并负责解释。
本标准起草单位:中国电力科学研究院、广东省电力试验研究所、福建省电力试验研究院、安徽省电力科学研究院、华北电力科学研究院、武汉高压研究所。
本标准起草人:王圣、高克利、林春耀、欧阳旭东、张孔林、余国钢、何宏明、马继先、梅刚。
II电力变压器绕组变形的频率响应分析法1 范围本标准规定了用频率响应分析法检测变压器绕组变形的基本要求。
本标准适用于6kV及以上电压等级电力变压器及其他特殊用途的变压器。
2规范性引用文件下列文件中的条款通过本标准的引用而成为本标准的条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB1094.1 电力变压器第一部分总则(eqv IEC 60076–1:1993)GB1094.5 电力变压器第五部分承受短路的能力(neq IEC 60076–5:1976)DL/T596 电力设备预防性试验规程3 术语和定义下列术语和定义适用于本标准。
《专业耳机试音碟》(HeadphoneTestDisc)附带的小册子《专业耳机试音碟》(Head phone Test Disc)附带的小册子这是一张属于耳机发烧友自己的测试天碟!耳机发烧友的那种陶醉和痴迷的体验,一直令人羡慕和向往,其实与所有发烧友一样,除了要有经济基础和精力外,还需要很重要的一点,那就是知识和技术。
我们已经有了太多的发烧音响测试唱片,音源、功放、音箱甚至线材、器材架都能通过这些唱片一较长短,唯独忽略了人数众多的耳机发烧友们的需求。
选择用耳机听音乐,一不影响他人,而可随时享受音乐,三来发烧耳机的相对发烧音箱系统而言要低得多,更经济实惠。
如果有这么一张唱片,既能测试耳机的表现,又能让人在欣赏美妙音乐的同时,尽快融入到耳机营造出的美妙空简去,该是多么有意义的事情。
有鉴于此,我们从已经发行的多张唱片里,精遇出十七首动听曲目,对耳机系统来一个全面的测试。
同时,还附带了三个测试信号,可以让耳机发烧友多角度的进行测试,从而有针对性的改善和提升耳机系统的声音表现。
曲目说明01 The Hut On The Leg Of Hen & The Great Gateat at Kiev鸡脚上的小屋与基辅大门穆索尔斯基(拉威尔改编)From Pictures At An Exhibition 选自KZ一108《极致立体声二号一庄严》演奏:柏林爱乐管弦乐团指挥:肯特·中野这两首改编自钢琴组曲的管弦乐作品,气势凛然,声威逼人,尤其是《基辅大门》,庄严肃穆,威风堂堂,低频段特别的雄厚饱满,考验耳机的低频控制力,瞬态反应和动态范围。
02 elds OfGold金色的原野Vocal:Eva Cassidy 演唱:伊娃·卡斯迪Eva Cassjdy 嗓音多汁而秀丽,更带有一丝令人难以抗拒的锈惑,低音柔韧、中音醇厚、高音开杨,考验耳机的音色还原、层次和定位。
03 Johnny&Mary·JazzVariants乔尼和玛丽·爵士变奏曲Brmer: Martin Taylor·The O-zone Percussion Group 演奏:马丁·泰勒·零区打击乐队用优秀的耳机聆听,即使在大音量下也不会出现音质劣化的情况,鼓与纲琴水乳交融,鼓声结实有力,弹性十足,考验耳机的高低频延伸和乐器定位。