第4章 稳定性与Lyapunov方法
- 格式:pdf
- 大小:446.68 KB
- 文档页数:18
第四章稳定性与李雅普诺夫方法稳定性与李雅普诺夫方法是控制理论中的两个重要概念。
稳定性是控制系统分析中的基本问题之一,它描述了系统在受到干扰后能否回到平衡状态的能力。
李雅普诺夫方法是一种常用的稳定性分析方法,通过构造李雅普诺夫函数来判断系统的稳定性。
稳定性是控制系统设计中最基本的要求之一、一个稳定的系统能够在受到干扰后迅速恢复到平衡状态,而不会发生不可控制的震荡或不稳定的行为。
稳定性可以分为两种类型:渐近稳定性和有界稳定性。
渐近稳定性要求系统的状态能够收敛到一个稳定的平衡点,而有界稳定性要求系统的状态能够保持在一个有限范围内。
李雅普诺夫方法是一种通过构造李雅普诺夫函数来判断系统稳定性的方法。
李雅普诺夫函数是一个标量函数,它满足以下条件:1)对于任意非零的向量,李雅普诺夫函数的导数都是负的或零;2)当且仅当系统达到稳定时,李雅普诺夫函数的导数为零。
通过构造李雅普诺夫函数并分析其导数的符号,可以判断系统的稳定性。
在实际应用中,人们通常使用李雅普诺夫直接法、李雅普诺夫间接法和李雅普诺夫-克拉洛夫稳定性定理等方法来进行稳定性分析。
其中,李雅普诺夫直接法是最常用的方法之一,它通过选择一个合适的李雅普诺夫函数来判断系统的稳定性。
如果可以找到一个李雅普诺夫函数,使得该函数的导数对于所有非零的初始条件都是负的,则系统是渐近稳定的。
李雅普诺夫间接法是通过构造一个李雅普诺夫方程来判断系统的稳定性。
李雅普诺夫方程是一个微分方程,其中包含系统的状态向量和一个非负标量函数,满足一定的条件。
如果可以找到一个满足李雅普诺夫方程的解,并且该解是有界的,则系统是有界稳定的。
李雅普诺夫-克拉洛夫稳定性定理是李雅普诺夫方法的重要理论基础。
该定理表明,如果系统的李雅普诺夫函数存在并且连续可导,并且李雅普诺夫函数的导数满足一定的条件,则系统是渐近稳定的。
这个定理为李雅普诺夫方法的应用提供了重要的理论依据。
总之,稳定性与李雅普诺夫方法是控制理论中基础且重要的概念。


第4章稳定性与李雅普诺夫方法稳定性是评估一个系统的重要性能指标,它描述了系统在一定初始条件下是否能够保持其平衡状态。
稳定性分为两种类型,即渐近稳定性和有界稳定性。
渐近稳定性指的是系统随着时间的推移趋向于其中一平衡状态,而有界稳定性指的是系统在任意时刻的状态都保持在其中一有界范围内。
为了评估系统的稳定性,我们可以利用李雅普诺夫方法。
李雅普诺夫方法是一种通过构造李雅普诺夫函数来判断系统稳定性的方法。
李雅普诺夫函数是一个满足特定条件的函数,它的导数反映了系统状态变化的趋势。
通过对李雅普诺夫函数的导数进行分析,我们可以判断系统在任意时刻的状态是否会向着平衡状态演进。
在利用李雅普诺夫方法进行稳定性分析时,通常需要满足以下条件:1.李雅普诺夫函数必须是正定函数,并且在系统的平衡点上取得最小值。
2.李雅普诺夫函数的导数必须是负定函数,即在系统的平衡点附近的任意一点,李雅普诺夫函数的导数都小于等于零。
如果满足以上条件,那么系统就是渐近稳定的。
反之,如果李雅普诺夫函数的导数是正定函数,那么系统就是不稳定的。
除了判断系统的稳定性外,李雅普诺夫方法还可以用于定量的稳定性分析。
通过分析李雅普诺夫函数的导数的大小,我们可以得到系统状态变化的速度。
如果李雅普诺夫函数的导数越小,那么系统的稳定性就越好。
反之,如果李雅普诺夫函数的导数越大,那么系统的稳定性就越差。
在实际应用中,李雅普诺夫方法广泛应用于控制系统、电路系统和机械系统等领域。
通过利用李雅普诺夫方法进行稳定性分析,我们可以评估系统的稳定性,并对系统进行控制,以保持系统的稳定状态。
总之,稳定性是一个评估系统性能的重要指标,通过利用李雅普诺夫方法可以判断系统的稳定性,并定量地分析系统的稳定性。
李雅普诺夫方法在控制系统、电路系统和机械系统等领域有广泛的应用前景。
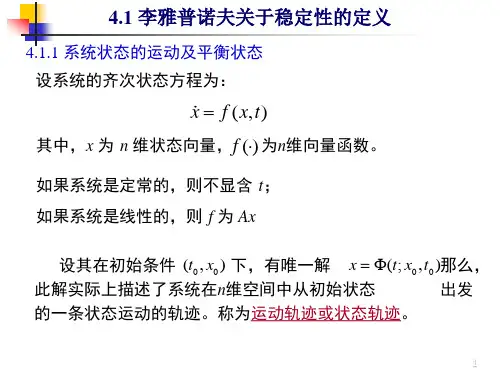
第四章稳定性与李亚普诺夫方法第四章稳定性与李亚普诺夫方法§4-1 李亚普诺夫关于稳定性的定义§4-1 李亚普诺夫关于稳定性的定义对于非线性系统通常存在多个平衡状态。
§4-1 李亚普诺夫关于稳定性的定义x§4-1 李亚普诺夫关于稳定性的定义二. 稳定性的几个定义§4-1 李亚普诺夫关于稳定性的定义§4-1 李亚普诺夫关于稳定性的定义2. 渐近稳定§4-1 李亚普诺夫关于稳定性的定义§4-1 李亚普诺夫关于稳定性的定义§4-1 李亚普诺夫关于稳定性的定义4.不稳定§4-1 李亚普诺夫关于稳定性的定义§4-2 李亚普诺夫第一法§4-3 李亚普诺夫第二法李亚普诺夫第二法基本思想:§4-3 李亚普诺夫第二法一.预备知识§4-3 李亚普诺夫第二法(4). 如果标量函数§4-3 李亚普诺夫第二法§4-3 李亚普诺夫第二法例:对于非线性系统§4-3 李亚普诺夫第二法例:对于线性系统§4-3 李亚普诺夫第二法§4-3 李亚普诺夫第二法定理2:设系统的状态方程为:§4-3 李亚普诺夫第二法§4-3 李亚普诺夫第二法例:系统的状态方程为§4-3 李亚普诺夫第二法不恒等于0,x§4-3 李亚普诺夫第二法§4-3 李亚普诺夫第二法例:系统的状态方程为:§4-3 李亚普诺夫第二法一. 线性定常系统的渐近稳定性判据§4-4 李亚普诺夫方法在线性系统中的应用§4-4 李亚普诺夫方法在线性系统中的应用§4-4 李亚普诺夫方法在线性系统中的应用∞§4-4 李亚普诺夫方法在线性系统中的应用§4-4 李亚普诺夫方法在线性系统中的应用§4-4 李亚普诺夫方法在线性系统中的应用其主子行列式:二. 线性时变系统的渐近稳定性判据三. 求解参数最优化问题§4-4 李亚普诺夫方法在线性系统中的应用§4-4 李亚普诺夫方法在线性系统中的应用§4-4 李亚普诺夫方法在线性系统中的应用§4-4 李亚普诺夫方法在线性系统中的应用§4-4 李亚普诺夫方法在线性系统中的应用§4-5 李亚普诺夫方法在非线性系统中的应用一. 雅可比矩阵法(克拉索夫斯基法))f =x §4-5 李亚普诺夫方法在非线性系统中的应用§4-5 李亚普诺夫方法在非线性系统中的应用二. 变量梯度法§4-5 李亚普诺夫方法在非线性系统中的应用是)(x V §4-5 李亚普诺夫方法在非线性系统中的应用因此,为了确定李亚普诺夫函数§4-5 李亚普诺夫方法在非线性系统中的应用§4-5 李亚普诺夫方法在非线性系统中的应用则为:)(x§4-5 李亚普诺夫方法在非线性系统中的应用。