观测系统定义
- 格式:ppt
- 大小:3.42 MB
- 文档页数:19
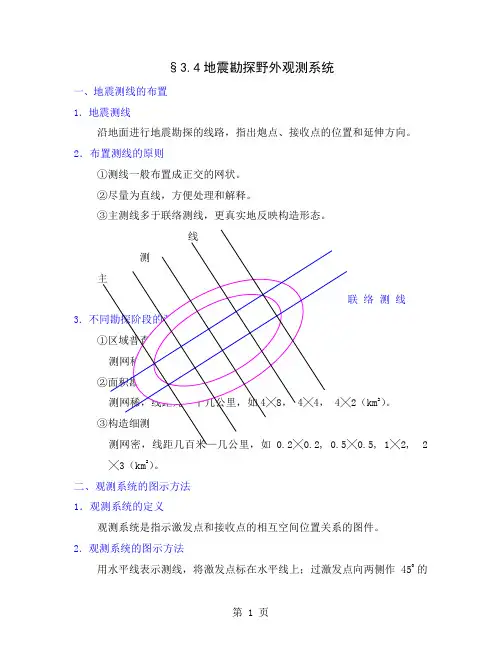
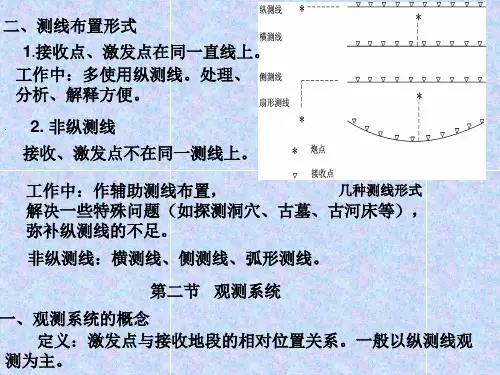
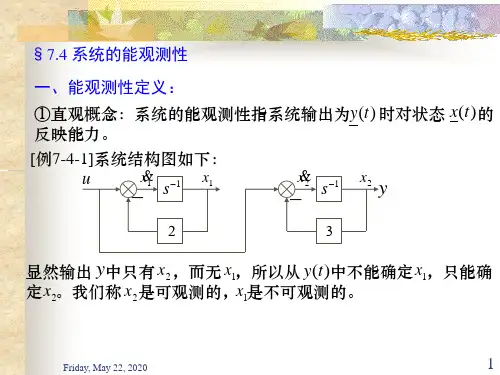
§3.4地震勘探野外观测系统一、地震测线的布置1.地震测线沿地面进行地震勘探的线路,指出炮点、接收点的位置和延伸方向。
2.布置测线的原则①测线一般布置成正交的网状。
②尽量为直线,方便处理和解释。
③主测线多于联络测线,更真实地反映构造形态。
络测线3.2(km2)。
0.5, 1╳2, 2╳3(km2)。
二、观测系统的图示方法1.观测系统的定义观测系统是指示激发点和接收点的相互空间位置关系的图件。
2.观测系统的图示方法用水平线表示测线,将激发点标在水平线上;过激发点向两侧作450的斜线;将接收点投影到过其激发点的450斜线上。
共炮点线共接收点线共反射点线共炮检距线斜线斜线垂线(覆盖次数) 水平线12345678910测线三、反射波法观测系统的基本类型1.简单连续观测系统例子:单边激发,单边接收,一次覆盖,偏移距为O。
12345测线P90图6.3-29b2.间隔连续观测系统例子:单边激发,单边接收,一次覆盖,偏移距不为0。
1234 5 测线P90图6.3-29d3.多次覆盖观测系统(1)定义地下界面被观测的次数多于一次,例如二次覆盖,三次覆盖,……。
(2)多次覆盖原理示意图M不经济,效率低。
(3)抽共反射点道集实现多次覆盖例如:单边激发,仪器有24道,每激发一次,炮点和排列一起向前移动2个道间距,即可形成6次覆盖。
O 1 O 2 O 3 O 4 O 5 1 O 6 O 7 O 8 O 9 O 10 O 11 O 12 O 131 3 5 7 9 11 13 15 17 19 21 23 24 P91图6.3-23抽共反射点道集——生产中放一炮多道接收,并按一定的规律布置排列,等室内处理时,将能收到同一个点的反射波的道从不同的炮中抽出来,按炮检距大小排列起来,叫做抽共反射点道集。
(4)6次覆盖,24道接收的共反射点道集表P92表6.3—1nNSx d 2=∆=υ P90、P91的N 与n 互换 。
2022年 4月 April 2022Digital Technology &Application 第40卷 第4期Vol.40 No.4数字技术与应用68中图分类号:V321.21 文献标识码:A 文章编号:1007-9416(2022)04-0068-03DOI:10.19695/12-1369.2022.04.23北京大兴国际机场自动气象观测系统简介与故障解决办法中国民用航空华北地区空中交通管理局 刘绍国自动气象观测系统(即AWOS)是民航空管气象设备的重要组成部分,保障自动气象观测系统运行正常对飞行安全有着重要的意义,因此自动气象观测系统的维护与故障排除工作特别重要。
本文介绍北京大兴国际机场自动气象观测系统组成及工作原理、并结合实例讲述故障排除和解决方法。
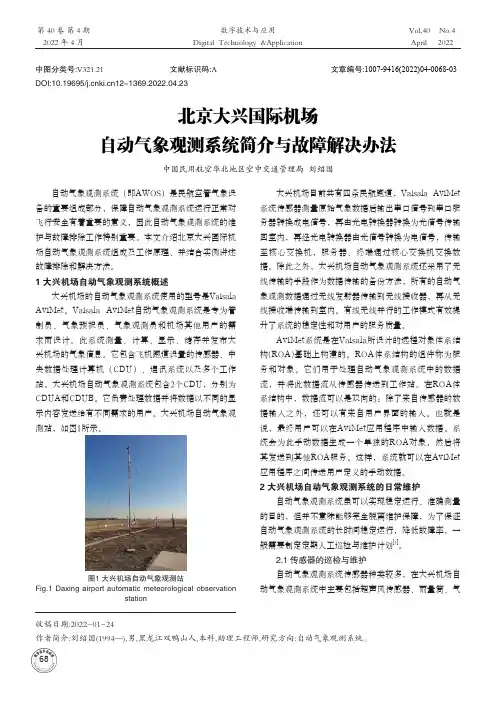
1 大兴机场自动气象观测系统概述大兴机场的自动气象观测系统使用的型号是Vaisala AviMet。
Vaisala AviMet自动气象观测系统是专为管制员、气象预报员、气象观测员和机场其他用户的需求而设计。
此系统测量、计算、显示、储存并发布大兴机场的气象信息。
它包含飞机跑道设置的传感器、中央数据处理计算机(CDU)、通讯系统以及多个工作站。
大兴机场自动气象观测系统包含2个CDU,分别为CDUA和CDUB。
它负责处理数据并将数据以不同的显示内容发送给有不同需求的用户。
大兴机场自动气象观测站,如图1所示。
收稿日期:2022-01-24作者简介:刘绍国(1994—),男,黑龙江双鸭山人,本科,助理工程师,研究方向:自动气象观测系统。
图1 大兴机场自动气象观测站Fig.1 Daxing airport automatic meteorological observationstation大兴机场目前共有四条民航跑道,Vaisala AviMet 系统传感器测量原始气象数据后输出串口信号到串口服务器转换成电信号,再由光电转换器转换为光信号传输回室内,再经光电转换器由光信号转换为电信号,传输至核心交换机,服务器、终端通过核心交换机交换数据。
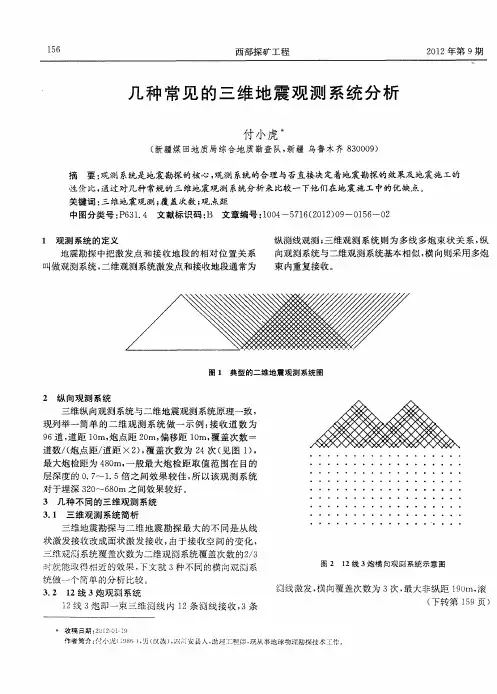
1 观测系统及主要参数的选择三维地震勘探是一种高密度面积采集技术,是三维体积勘探。
它利用炮点和检波点网格的灵活组合获得分布均匀的地下CDP点网格和确定的覆盖次数。
观测系统是指检波器排列和爆炸点相对位置的关系,要求是不仅在单张记录上可靠追踪有效波,且要保证在所得资料上连续追踪地震界面。
观测系统正确与否直接影响数据采集质量、资料处理和地质成果的精度。
三维观测系统的形式基本可分为两大类,即规则观测系统和不规则观测系统。
规则观测系统用于地面施工条件好的地区,不规则观测系统用于地面障碍较多的地区。
在目前三维地震勘探中,线束型观测系统是经常被选用的一种规则观测系统。
其优点是可以获得从小到大均匀的炮检距分布和均匀的覆盖次数,适用于复杂地质条件地区。
此外,当遇到障碍物时可通过改变纵横向偏移距和激发方向等灵活的变观手段,获得障碍物下地震资料。
1.1 空间采样间隔的确定空间采样是指分布在地面上离散的检波点采集的地震讯号,空间采样间隔包括道距和束线中的接收线距。
根据采样定理,道距ΔX应为:ΔX≤■×■(1)若某区应保护煤层反射波主频为50 Hz,视速度V取2 300 m/s,则:ΔX≤■×■=23 m那么该区可以采用20 m的接收道距。
接收线距一般大于道距的1~4倍。
一般为40 m。
1.2 网格的确定三维地震勘探与二维地震勘探的迭加形式是不同的,二维是共反射点迭加,三维则是共反射面元迭加。
共反射面元迭加是指共反射面元道集内各反射点信号的迭加。
反射面元的大小在纵向上一般取小于接收点距之半为共反射面元的线性长度即Dx≤ΔX/2,一般为10 m,横向宽度Dy≥Dx,一般也选为10 m。
根据上述选择CDP点网格为:Dy×Dx=10 m×10 m。
这样小的CDP点网格对探测细微构造和小幅度起伏是极为有利的。
1.3 炮线间距的确定炮线间距即为炮点线向前滚动的距离。
在规则观测系统中,炮点线呈线状规则排列,并垂直于观测束线。
第一章 地震勘探的理论基础1、各向同性介质:弹性与空间方向无明确关系的介质称各向同性介质,否则是各向异性介质。
2、泊松比σ:弹性体受力纵向伸长(缩短)与横向收缩(膨胀)的比值。
L L d d //∆∆=σ3、对于大多数沉积岩石,σ=0.25,∴V P =1.73V S 。
4、瑞雷面波(R 波)特点:(1) 波的能量分布在地表附近的介质中并随深度迅速衰减。
(2) 质点振动方向分上、下、坐、右,合成的振幅轨迹是椭圆(逆时针方向),长轴垂直地面,长短轴比值是2/3。
(3) 当σ=0.25时,V R = 0.92V S =0.54V P ,速度低、频率低(10~30Hz),波形宽。
(4) 有频散(波散)现象,不同频率的成分传播速度(相速度)不同,即群速度不等于相速度。
5、拉夫面波(L 波) 特点:能量沿地震界面分布,振动方向与传播方向垂直,振动平面平行界面,即为SH 波,由于水平振动,检波器接收不到。
6、地震波的特征:运动学特征——研究波在地层中传播的空间位置与传播时间的关系。
动力学特征——研究波在地层中传播的能量(振幅)变化和波形特征(频谱)。
7、惠更斯原理(1690)也叫波前原理,说明波向前传播的规律。
在弹性介质中,任意时刻波前面上的每一点,都可看作是一个新的波源(子波)而产生二次扰动,新波前的位置可认为是该时刻各子波波前的包络。
惠更斯原理只给出了波传播的空间位置,而不能给出波传播的物理状态。
菲涅尔(1814)对惠更斯原理进行了补充:波在传播时,任意点处的振动,相当于上一时刻波前面上全部新震源产生的子波在该点处相互干涉的合成波。
8、视速度定理地震波的传播是沿射线方向进行的,而观测地震波是沿测线方向进行的,其方向和射线方向不一致。
波前沿测线传播的速度不是真速度V ,而是视速度*V 。
αsin //=∆∆=∆∆∆∆=*xs t x t s V V βαcos sin V V V ==* 式中 α——射线与地面法线的夹角,称入射角;β——波前与地面法线的夹角,称出射角。
地震数据处理方法预处理预处理主要包括数据解编、格式转换、道编缉、观测系统定义等工作。
一、数据解编目前野外地震数据有两类基本的格式,一类是按照采样时间顺序排列的多路传输记录,称为时序记录;另一类是以地震道为顺序排列的民录,称为道序记录。
解编就是按照野外采集的记录格式将地震数据检测出来,并将时序的野外数据转换为道序数据,然后按照炮和道的顺序将地震记录存放起来。
每一个地震道由道头和数据两部份组成,道头用来存放描述地震道特征的数据,如野外文件号(FFID)记录道号(Channel Number)、CMP号、炮检距(offset)、炮点高程和检波点高程等。
道头是地震数据处理中十分重要的信息,不正确的道头信息会使得某些处理模块产生错误的处理结果。
二、道编辑道编辑是对由于激发、接改或噪声因素产生的不正常的地震道进行处理。
对由于检波器工作不正常造成的瞬变噪声道和单频信号道等进行剔除,对记录极性反转的地震道进行改正对地震记录中的强突发噪声和强振幅野值进行压制等。
道编辑是地震数据噪声压制中的重要环节。
三、野外观测系统定义地震数据处理中的许多工作是基于地震道的炮点坐标、检波点坐,以及根据这些坐标所定义的处理网格进行的。
野外地震数据的道头中记录了每一个地震道的野外文件号(FFID)和道号(Channel Number),炮点和检波点的坐标信息记录在野外班报中。
观测系统定义就是以野外文件和号和记录道号为索引,赋予每一个地震道正确的炮点坐标、检波点坐标,以及由此计算的中心点坐标和面元序号,并将这些数据记录在地震道头上或观测系统数据库中。
观测系统定义一般由炮点定义、检波点定义和炮点与检波点关系模版定义三部分构成。
观测系统定义是地震数据处理中得要的基础工作。
不同的处理系统,观测系统定义方式不同,总体而言比较繁琐,特别是当野外采集条件复杂,观测系统变化较大,偏离设计位置的炮点、检波点数目较多时,很容易产生错误,因此需要有相应的质量控制手段对观测系统进行检查。
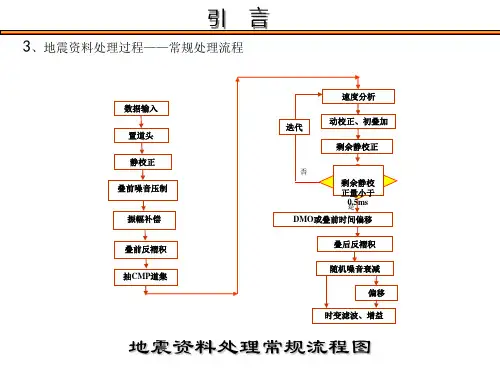
地震数据处理基本流程
地震数据处理基本流程:
①数据输入:将原始地震数据导入处理系统,这通常涉及到数据的读取、格式转换和初始检查。
②观测系统定义:设定地震数据的观测参数,包括炮点和检波器的位置、深度、覆盖次数等信息。
③预处理:对数据进行初步清洗,包括数据解编、格式转换、道编辑、噪声去除、缺失数据插值等。
④静校正:进行野外静校正,修正由于地形、近地表速度结构变化等因素引起的传播时间差异。
⑤动校正:进行动校正以补偿地震波在不同路径长度上的传播时间差,通常基于速度模型。
⑥反褶积:压缩地震子波,提高时间分辨率,减少多次波的影响。
⑦速度分析:确定地震波在地下各层的速度,用于后续的动校正和偏移处理。
⑧剩余静校正:对动校正后的数据进行进一步的静校正,以消除残余的传播时间误差。
⑨叠加:对校正后的数据进行叠加,提高信噪比,形成叠加剖面。
⑩偏移:进行偏移处理,将地震数据从共反射点(CMP)域转换到真实地质结构的空间位置,生成偏移剖面。
⑪显示与解释:将处理后的地震数据以图像形式显示,供地质学家进行解
释,识别地层结构、断层和油气藏等。
⑫质量控制:在处理的每个阶段,进行质量控制检查,确保数据的准确性和可靠性。
地震观测系统名词解释
地震观测系统是由一系列的设备组成的,用于记录和监测地震地球物理活动的系统。
它可以提供有价值的记录和信息,可以帮助预测或预警未来的地震事件。
1. 台站:是指安装有地震仪器的一组设备,用于记录和监控地震地球物理活动的地点。
2. 地震仪器:是指用于记录和监测的专用测震设备。
3. 传输系统:是指用来收集和传送台站数据的设备和软件。
4. 计算机处理系统:是指用于分析台站数据的计算机系统。
5. 存储系统:是指用于存储台站数据的系统。
6. 屏显系统:是指用于显示台站数据的系统。
7. 报警系统:是指当台站数据达到设定的门限值时,用于发出报警的系统。
- 1 -。
气象自动观测系统观测内容气象自动观测系统(Automatic Meteorological Observation System, AMOS)是一种先进的气象观测设备,在气象预测和气候研究中有着广泛的应用。
以下是本文将要介绍的AMOS观测内容:第一,温度观测。
AMOS可以准确地测量空气、地面和水面的温度。
温度是气象预测和气候研究中的一个重要参数,直接影响着大气环流和气候的变化。
地面温度的观测对于农业、森林和建筑业等领域的决策也有着重要的作用。
第二,湿度观测。
AMOS可以实时测量空气、地面和水面的相对湿度和绝对湿度。
湿度是气象预测和气候研究中的一个重要参数,直接影响着大气的水汽含量和降水形式。
湿度也是航空、农业、能源等领域的关键参数之一。
第三,风速和风向观测。
AMOS可以准确地测量空气、地面和水面的风速和风向。
风是气象预测和气候研究中的一个重要参数,直接影响着大气的运动和传递。
航空、海洋、环境等领域的研究都需要风速和风向的数据。
第四,大气压力观测。
AMOS可以实时测量空气的气压,可用于大气运动和气象预测模型的数据支撑。
大气压力也是天气预报和环境监测中的重要参数。
第五,降水观测。
AMOS可以实时测量空气中的降雨量、降雪量和积雪深度等参数。
降水是气象预测和气候研究中的重要参数之一,也是农业、水利和环境等领域的关键参数之一。
第六,辐射观测。
AMOS可以实时测量太阳辐射、长波辐射和短波辐射等参数。
辐射是气象预测和气候研究中的重要参数之一,直接影响着大气的能量平衡和地表温度。
太阳辐射也是能源领域的重要参考数据之一。
综上所述,AMOS观测内容涵盖了温度、湿度、风速、风向、大气压力、降水和辐射等多个气象参数,在气象预测、气候研究和各领域的应用研究中都有着广泛的应用。
随着科技的不断发展,AMOS的观测能力也在不断提高,将为人类更好地了解大气环境提供更加精确的数据支撑。