塔吊电气原理图ppt课件
- 格式:ppt
- 大小:1.38 MB
- 文档页数:11
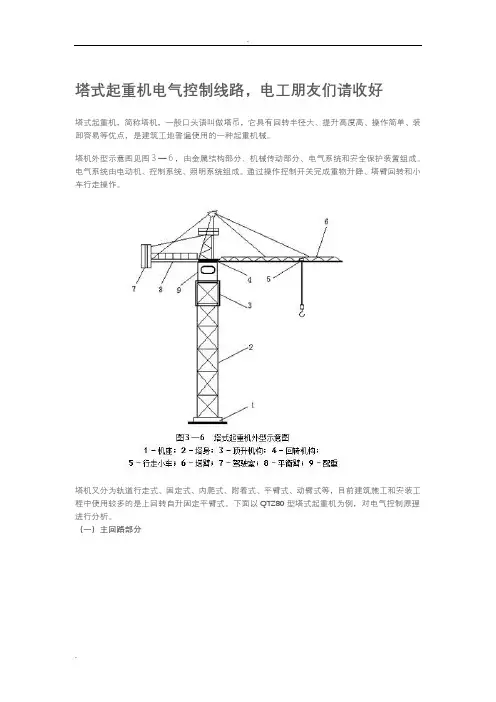
塔式起重机电气控制线路,电工朋友们请收好塔式起重机,简称塔机,一般口头语叫做塔吊,它具有回转半径大、提升高度高、操作简单、装卸容易等优点,是建筑工地普遍使用的一种起重机械。
塔机外型示意图见图3—6,由金属结构部分、机械传动部分、电气系统和安全保护装置组成。
电气系统由电动机、控制系统、照明系统组成。
通过操作控制开关完成重物升降、塔臂回转和小车行走操作。
塔机又分为轨道行走式、固定式、内爬式、附着式、平臂式、动臂式等,目前建筑施工和安装工程中使用较多的是上回转自升固定平臂式。
下面以QTZ80型塔式起重机为例,对电气控制原理进行分析。
(一)主回路部分(二)控制线路总起动部分(三)小车行走控制小车行走控制线路见图3—9,操作小车控制开关SA3, 可控制小车以高、中、低三种速度向前、向后行进。
控制原理如下:1、小车行走控制2、线路保护(1)终点极限保护:当小车前进(后退)到终点时,终点极限开关4SQ1(4SQ2)断开,控制线路中前进(后退)支路被切断,小车停止行进。
(2)临近终点减速保护:当小车行走临近终点时,限位开关4SQ3、4SQ4断开,中间继电器4KA1失电,中速支路、高速支路同时被切断,低速支路接通,电动机低速运转。
(3)力矩超限保护:力矩超限保护接触器1KM2常开触头接入向前支路,当力矩超限时,1KM2失电,向前支路被切断,小车只能向后行进。
(四)塔臂回转控制塔臂回转控制线路见图3—10,操作回转控制开关SA2 , 可控制塔臂以高、中、低三种速度向左、向右旋转。
控制原理如下:1、右(左)回转控制1、制动器控制3、线路保护(1)回转角度限位保护:当向右(左)旋转到极限角度时,限位器3SQ1(3SQ2)动作,3KM2(3KM3)失电,回转电动机停转,只能做反向旋转操作;(2)回转角度临界减速保护:当向右(左)旋转接近极限角度时,减速限位开关3SQ3(3SQ4)动作断开,3KA1、3KM5、3KM6、3KM7失电,3KM4得电,回转电动机低速运行。

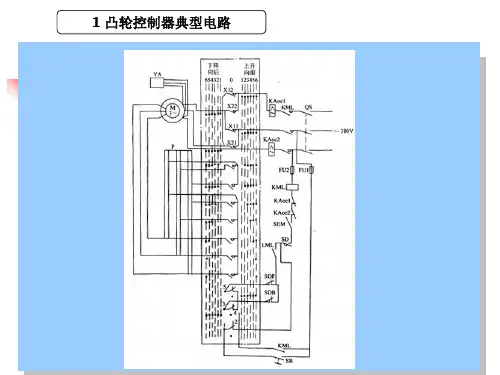
塔吊起重电气原理图塔吊一般都是电力拖动,所有的工作机构都是由电动机来提供动力。
我们先看一下三速电机的控制原理图。
有的电动机(如鼠笼式)的调速是靠改变线圈绕组(定子绕组)的接线来调速的,如星型(Y型)转变为三角形(△型)(4级变6级),双Y型转变为单Y型,(4级变8级)。
通过线圈的外抽接头和接触器的配合使用来改变绕组线圈的受电压,从而改变电机的转速。
这样只是双速,三速的就另外加一组绕组。
SB1是停止按钮,SB2是启动按钮,KA是中间继电器,KT1,KT2是时间继电器,这是一个启动后自动逐档加速的三速电动机控制图。
SB2按下后,KA线圈工作且自锁,KM1和ST1工作,这是电机是一档。
ST2也已工作。
ST1工作3秒后,KM1断电,同时KM2工作。
这是电机二档。
ST2工作6秒后(一般都是延时3-5秒),KM2断电,同时KM3,KM4工作,KM3,KM4自锁,KA断电,KT2断电,这是三挡。
KM1,KM2,KM3,4三挡之间有互锁,ST1工作时,ST2也已工作,3秒(设定)后ST1先断KM1,再通KM2,6秒(设定)后,ST2先断KM2,再通KM3,4。
至于主电路电机的绕组接法,有兴趣的再画图了解。
这是一张,塔吊的主电路图。
其中小车和回转是双速鼠笼式电机。
主钩是绕线式电机调速。
我们再来讨论一下绕线型电机调速。
M2是制动器上的液压小电机,M3是主电机(绕线型),外接大变阻箱。
起升控制的具体控制原理如下:(先看,顺便复习一下读图)操作起升控制开关SA1分别置于不同档位,可用低、中、高三种速度起吊。
起升控制线路如图3—11所示,为了便于分析电气控制过程,现将提升状态五个档位对应控制线路分解叙述,见图3—12~15。
3—11起升控制线路1、控制开关拨至上升第Ⅰ档,S1 S3闭合,控制线路分解为图3—12。
接触器2KM1得电、力矩限制接触器1KM2触头处于闭合状态,2KM3得电使低速支路长开触头闭合,2KM6、2KM5相继得电,对应主线路2KM6闭合,转子电阻全部接入,2KM1闭合,转子电压加在液压制动器电机M2上使之处于半制动状态,2KM5闭合,滑环电动机M3定子绕组8级接法, 2KM3闭合,电动机得电低速正转(上升)。

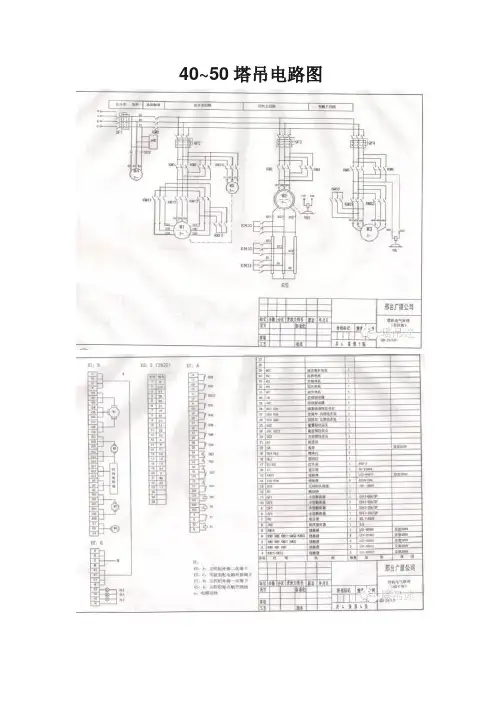
40~50塔吊电路图一:下面就是介绍工作原理01)总起按下启动SB2,电源构成回路,指示灯HL6亮,另一路经线号6至A1,JHD,接触器线圈KM0,构成回路总起接触器吸合动作,同时线号5接KM0常开(这时常开变闭合)至线号6,以保持总起接触器线圈正常的供电。
(按下停止按钮SB1,线圈失压就会停止工作)。
02)起降电路021)起升电路经过(线号6)至上升万转开关依次串联,(线号8)上升限位器SQ1 (线号9),重量限位器(线号10),下降互联锁KM2(线号102),起升线圈KM1(线号16),力矩限位器SQ3(线号17)至电源C1构成回路022)下降电路经过(线号6)至下降万转开关依次串联,(线号11)下降限位器SQ12(线号12),起升互联锁KM1(线号72),下降线圈KM2至电源C1构成回路023)1速电路经过(线号6)至1速万转开关依次串联,(线号14)2速互联锁KM12(线号74),3速互联锁KM13(线号73),1速线圈KM11至电源C1构成回路024)2速电路经过(线号6)至2速万转开关依次串联,(线号15)(一路至换挡限位)1速互联锁KM11(线号103)3速限位器(线号107)2速线圈KM15(KM15闭合,辅助触头KM15动作,线号75,线圈KM12得到电吸合)至电源C1构成回路025)3速电路经过(线号6)至3速万转开关依次串联,(线号13)超载换挡力矩SQ4(线号203),1速互联锁KM11(线号77),2速互联锁KM12(线号79)2速互联锁KM15(线号104),3速线圈KM13至电源C1构成回路03)油泵起落接触器KM1(或者KM2)动作,辅助触头相应的动作KM1(或者KM2是并联)闭合导通,串联1速辅助触头KM11(或者2速KM12,3速KM13是并联)闭合导通带动油泵接触器KM14吸合动作油泵得到电工作;这种电路预防1速(或者2速,3速)接触器烧毁油泵直接接在起落接触器KM1(KM2)输出上,产出失控滑钩的危险。