电机拖动控制(机电传动控制)11-步进电机
- 格式:pdf
- 大小:666.01 KB
- 文档页数:29

第13章步进电动机传动控制系统教学内容13.1 步进电动机13.2 步进电动机的环形分配器13.3 步进电动机的驱动电路13.4 步进电动机的运行特性及选用中应注意的问题教学安排本章安排2个学时,采用多媒体授课。
知识点及其基本要求1.掌握步进电动机步矩角和步进电动机转速的数学表达式及其物理意义;2.掌握步进电动机的结构、运行特性及影响因素。
重点和难点重点掌握步进电动机的通电方式和主要性能指标。
难点步进电动机的矩角特性和矩频特性。
教学设计1.了解步进电动机的结构和工作原理,掌握步进电动机的通电方式和求解步距角与转速的公式。
步进电机是将电脉冲信号转变为角位移或线位移的机电执行元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
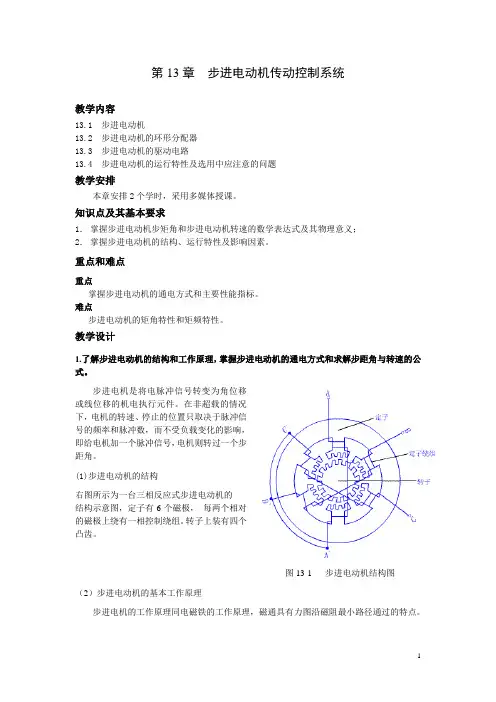
(1)步进电动机的结构右图所示为一台三相反应式步进电动机的结构示意图,定子有6个磁极,每两个相对的磁极上绕有一相控制绕组。
转子上装有四个凸齿。
图13-1 步进电动机结构图(2)步进电动机的基本工作原理步进电机的工作原理同电磁铁的工作原理,磁通具有力图沿磁阻最小路径通过的特点。
图13-2 三相反应式步进电动机的工作原理图通电顺序A-B-C-A,转子便按顺时针方向一步步转动。
每换接一次,转子前进一个步距角。
通电顺序改为A-C-B-A便可反向旋转。
(3)步进电机的通电方式三相单三拍通电顺序:A-B-C-A或A-C-B-A,步距角30度(齿距90度)特点:每次只有一相控制绕组通电吸引转子,易引起在平衡位置振荡,稳定性差,绕组通电换极时易失步。
双三拍通电顺序:AB-BC-CA-AB或反过来,步距角30度(齿距90度)特点:始终有两相通电,感应力矩大,静态误差小,定位精度高,工作稳定,不易失步。
三相六拍通电顺序:A-AB-B-BC-C-CA-A步,距角15度(齿距90度)或A-AB-B-BC-C-CA-A特点:单、双相轮流通电,通电状态增加一倍、步距角减少一半,但具有双三拍的特点。
步进电机课件步进电机课件步进电机是一种常见的电机类型,广泛应用于各个领域,包括机械制造、自动化控制、电子设备等。
本文将从步进电机的原理、分类、应用以及未来发展等方面进行探讨,帮助读者更好地了解和应用步进电机。
一、步进电机的原理步进电机是一种将电脉冲信号转化为机械转动的电机。
它通过不断地给电机提供脉冲信号来驱动电机转动。
步进电机的转动是以步进角为单位的,每个步进角对应一个脉冲信号。
通过控制脉冲信号的频率和数量,可以控制步进电机的转速和转动方向。
步进电机的原理主要包括两个方面:电磁学和机械学。
在电磁学方面,步进电机通过电磁场的相互作用来产生转矩。
在机械学方面,步进电机的转动是通过电磁场的变化来驱动转子转动。
二、步进电机的分类步进电机可以根据不同的驱动方式和结构进行分类。
按照驱动方式,步进电机主要分为两种类型:开环步进电机和闭环步进电机。
开环步进电机是最常见的步进电机类型,它通过给电机提供脉冲信号来驱动转动。
开环步进电机的优点是结构简单、成本低廉,适用于一些简单的应用场景。
但是由于没有反馈机制,开环步进电机容易出现失步现象,影响精度和稳定性。
闭环步进电机是相对于开环步进电机而言的,它在驱动电机的同时还有反馈机制。
闭环步进电机可以通过检测电机的位置和速度来实现闭环控制,提高精度和稳定性。
闭环步进电机适用于一些对精度要求较高的场合,如医疗设备、精密仪器等。
步进电机还可以根据结构进行分类,主要包括单相步进电机、双相步进电机和多相步进电机等。
不同结构的步进电机适用于不同的应用场景,读者可以根据具体需求选择合适的步进电机。
三、步进电机的应用步进电机广泛应用于各个领域,包括机械制造、自动化控制、电子设备等。
下面列举几个常见的应用场景。
1. 机械制造:步进电机可以应用于各种机械设备中,如数控机床、印刷机、纺织机等。
步进电机的高精度和稳定性可以提高机械设备的加工精度和工作效率。
2. 自动化控制:步进电机可以应用于各种自动化控制系统中,如自动门、自动售货机、机器人等。


第十三章步进电机
13.1步进电动机的结构与原理
1.概念:
概念
步进电动机或称脉冲电动机,是一种将输入脉冲信号转换成输出轴的角位移(或直线位移)的执行元件。
步进电动机每输入一个脉冲信号,便转动一个确定的角度(称为:步距角)。
输出轴转过的总角度是与输入脉冲的个数成正比,输出轴转速与出轴转过的总角度是与输入脉冲的个数成正比输出轴转速与
脉冲的频率和歩距角成正比。
N n f
θβ
∝∝
2.结构定子:硅钢片叠成
定子:凸极式相:每两个相对的磁极上绕有一个
线圈,构成一相。
控制线圈
三相:六个极,三个绕组,构成三相
131
13.1 三相反应式步进电动机的结构示意图转子:材料:硅钢片或软磁材料
4个凸极、无绕组
3.类别:按励磁方式分为:
反应式转子无励磁绕组磁阻式反应式:转子无励磁绕组,磁阻式永磁式:转子为永久磁铁混合式(永磁感应式)
按输出转矩分类为快速步进电动机07N 4N 按输出转矩分类为:快速步进电动机
0.7 Nm~ 4 Nm ;功率步进电动机
T=5 Nm~ 4 0Nm ;
4.特点:
f
n N θβ
∝∝●线性好,无累计误差,可变频调速;
●抗干扰能力强;
●转动惯量小能快速起动反转与制动在一相绕●转动惯量小,能快速起动、反转与制动。
在相绕
组通电的情况下有自锁能力。
5.工作原理
(1)工作原理:电磁铁原理:定子绕组通电,在铁心中产生
磁场,总是力图沿磁阻最小的路径通过。
这种磁场力产生力矩,使转转动当达到最短路径的位置则自锁
使转子转动,当达到最短路径的位置则自锁。
转子自锁位置定子绕组通电顺序(顺时针)转子自锁位
A B C转子顺时针转向
100A---1A’---3
010B---2B---4
B2’4 001C3C1
C---3’----1 100A---4A’---2
图13.2 单三拍通电方式时转子的位置(a)A相通电
图13.2 单三拍通电方式时转子的位置(b)B相通电
图13.2 单三拍通电方式时转子的位置(c)C相通电
图13.2 单三拍通电方式时转子的位置(a)A相通电
图13.3 步进电机的通电方式(a)A相通电
图13.3 步进电机的通电方式(b)A、B相通电
图13.3 步进电机的通电方式(c)B相通电
图13.3 步进电机的通电方式(d)B 、C相通电
13.3B
6. 步进电动机的主要特性
(1)矩角特性——电磁转矩随偏转角度变化的关系
近似为正弦曲线
(2)启动惯频特性——启动频率与负载转动惯量的关系空载时,由静止突然启动且不失步所允许的最高启动
空载时由静止突然启动且不失步所允许的最高启动频率,称为启动频率或突调频率
(3)运行频率特性
不失步运行的最高脉冲频率
(4)矩频特性
负载转动惯量一定且稳态运行时的最大输出转矩与脉冲频率的关系。
7. 步进电动机的主要性能指标
(1)步距角β——每给一个电脉冲信号,步进电机 转子所应转过角度的理论值。
(2)精度 最大步距角误差:电动机旋转一转相邻两步间
实际最大步距与理论步距的差值 步距累积误差最大值:一转范围内,从任意位
置开始经过任意步后,角位移误差的最大值 (3)最大静转矩Ts max
可能驱动的最大负载转矩 (4)保持转矩(HOLDING TORQUE)
绕组通电但没有转动时,电磁转矩的最大值 (5)定位转矩(DETENT TORQUE,钳制转矩)
没有通电的情况下,定子锁住转子的力矩 (6)启动频率fs——不失步启动的最高脉冲频率
8、步进电动机传动控制系统的主要特点
(1) 步进电动机的步数和转速 与输入脉冲频率之间有严格的正比关系, 不会因电压的波动、负载的增减以及温度等 外部环境的变化而变化;
(2) 步距误差不会产生积累误差; (3)控制性能好,在一定的额率范围内
能按输入脉冲信号的要求迅速启动、反转和停止, 且能在较宽的范围内通过改变脉冲频率来进行调速。
(4)步进电动机拖动控制系统不用反馈也能实现较高精 度的角度和转速控制。
简化了系统、降低了成本,特别适用于开环数控系统。
13.2 步进电机的环形分配器
1.步进电动机的驱动
步进电动机通过专用电源来驱动,专用电源由环行分配 器与功率放大器组成。
QA
QA
CAJ
K
&
&
&
&
W+Δx
W−Δx
QB QB
CBJ K R
&
QC
QC 复
位
CCJ
KR
CP
&
&
&
&
&
&
&
QA
QB QC
2.步进电机的环形分配器
(1)概念:环形分配器既可用硬件逻辑电路 来实现,又可 编软件程序实现。
硬件逻辑电路 有:
RS触发器的逻辑电路
D触发器的逻辑电路
JK触发器的逻辑电路
以JK触发器组成的三相六拍环形分配器为例,讲解分配器逻 辑电路:
环形分配器的输出端:
QA → A 导通: A = 1
不导通:A = 0
QB → B B =1 B=0
QC → C C =1 C=0
环形分配器输入端:
QA 、 QB 、 QC 、 W+ΔX 、 W−ΔX
通电顺序:
正转: A → AB → B → BC → C → CA
反转: A → AC → C → CB → B → BA
逻辑变量: 正转:10
W+ΔX = 1
W−ΔX = 0
反转:01
JK触发器的输入端:
W+ΔX = 0
W−ΔX = 1
CAJ = W+ΔX QB + W−ΔX QC
CBJ = W+ΔX QC + W−ΔX QA
CCJ = W+ΔX QA + W−ΔX QB
环形分配器逻辑关系:
CAJ
CBJ
CCJ
CAJ
CBJ
CCJ
环形分配器逻辑电路: 逻辑电路:与非门实现逻辑关系
非门保持 J=0
J=1 清除 J=K=0
J=K=1
K=1 的状态
K=0 的状态
• 五相反应式步进电动机,五相十拍,歩距角 1.5°,频率为3000Hz,求转速?
60βf = 750rpm
360
60βf 2π
= 42971.8rpm
• 五相反应式步进电动机,歩距角为1.5°/0.75°, 求转子齿数?
β = 1 360o = 1 360o
N Z Km Z m : 相数
K
=
⎧1: 单三拍、双三拍
⎨ ⎩
2:单、双六拍
Z = 1 360o = 360 = 48
Km β 1× 5×1.5
。