模式识别-2-线性判别函数与线性分类器设计.
- 格式:ppt
- 大小:1.31 MB
- 文档页数:66

第 1 页第二讲 线性分类器一、 判别函数1、 决策论方法在模式识别中,如果根据模式特征信息,按照决策论的思路,以一定的数量规则来采取不同的分类决策,将待识别的模式划分到不同的类别中去,就称为模式识别的决策论方法。
在决策论方法中,特征空间被划分成不同的区域,每个区域对应一个模式类,称为决策区域(Decision Region )。
当我们判定待识别的模式位于某个决策区域时,就判决它可以划归到对应的类别中。
图1 决策区域需要注意的是:决策区域包含模式类中样本的分布区域,但不等于模式类的真实分布范围。
2、 判别函数如果特征空间中的决策区域边界(Decision Boundary )可以用一组方程0)( x i G来表示,则将一个模式对应的特征向量x 代入边界方程中的)(x i G ,确定其正负符号,就可以确定该模式位于决策区域边界的哪一边,从而可以判别其应当属于的类别,)(x i G 称为判别函数(Discriminant Function )。
判别函数的形式可以是线性的(Linear )或非线性(Non-linear)的。
第 2 页例如图2就显示了一个非线性判别函数,当G (x )>0时,可判别模式x ∈ω1;当G (x )<0时,可判别x ∈ω2。
图2 非线性判别函数非线性判别函数的处理比较复杂,如果决策区域边界可以用线性方程来表达,则决策区域可以用超平面(Hyperplane )来划分,无论在分类器的学习还是分类决策时都比较方便。
例如图3中的特征空间可以用两个线性判别函数来进行分类决策:当G 21(x )>0且G 13(x )>0时,x ∈ω2; 当G 13(x )<0且G 21(x )<0时,x ∈ω3; 当G 21(x )<0 且 G 13(x )>0时,x ∈ω1;当G 21(x )>0且G 13(x )<0时,x 所属类别无法判别。

基于模式识别的个人认识班级自动化1002班姓名刘永福学号 1009101016摘要:本文主要介绍了模式识别的基本理论概念及算法,通过对模式识别的几种算法的概括、分析,推出算法的要求及步骤,实现样本的基本分类要求。
主要包括模式识别及模式识别系统的基本概念以及应用领域、线性判别函数的介绍及相关算法的推理证明、非线性判别函数的介绍及相关算法的推理证明。
一.模式识别及模式识别系统(1)模式识别的基本概念模式识别是以计算机为工具、各种传感器为信息来源,数据计算与处理为方法,对各种现象、事物、状态等进行准确地分析、判断识别与归类,包括人类在内的生物体的一项基本智能。
对于模式和模式识别有“广义”和“狭义”两种解释:广义地说,存在于时间和空间中可观察的事物,如果可以区别它们是否相同或相似,都可以称之为模式。
此时,模式识别是生物体(包括人)的基本活动,与感觉、记忆、学习、思维等心理过程紧密联系,是透视人类心理活动的重要窗口之一。
从这个角度讲,模式识别是研究生物体如何感知对象的学科,属于认识科学的范畴,是生理学家、心理学家、生物学家和神经生理学家的研究内容,常被称做认知模式识别。
具体来说,它是指人们把接收到的有关客观事物或人的刺激信息与他在大脑里已有的知识结构中有关单元的信息进行比较和匹配,从而辨认和确定该刺激信息意义的过程。
正是通过认知模式识别,我们才能认识世界,才能辨别出各个物体之间的差别,才能更好地学习和生活。
狭义地说,模式是为了能让计算机执行和完成分类识别任务,通过对具体的个别事物进行观测所得到的具有时间和空间分布的信息。
把模式所属的类别或同一类中模式的总体称为模式类(或简称为类)。
计算机模式识别就是指根据待识别对象的特征或属性,利用以计算机为中心的机器系统,运用一定的分析算法确定对象的类别的学科,是数学家、信息学专家和计算机专家的研究内容。
因此,模式识别的研究主要集中在认知模式识别和计算机模式识别这两个方面。
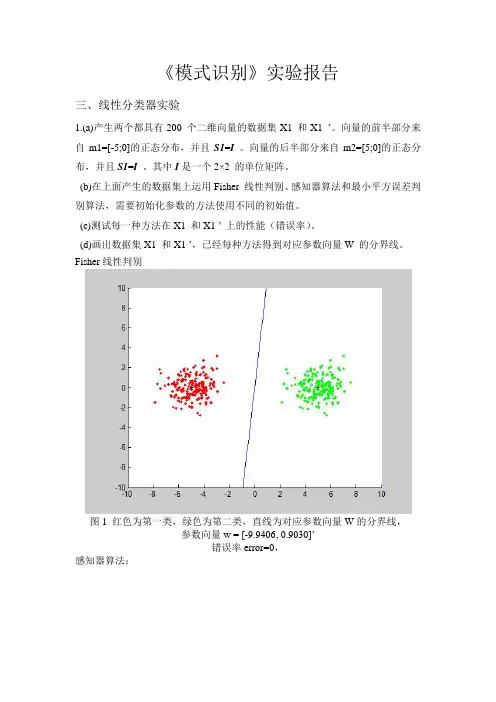
《模式识别》实验报告三、线性分类器实验1.(a)产生两个都具有200 个二维向量的数据集X1 和X1 ’。
向量的前半部分来自m1=[-5;0]的正态分布,并且S1=I 。
向量的后半部分来自m2=[5;0]的正态分布,并且S1=I。
其中I是一个2×2 的单位矩阵。
(b)在上面产生的数据集上运用Fisher 线性判别、感知器算法和最小平方误差判别算法,需要初始化参数的方法使用不同的初始值。
(c)测试每一种方法在X1 和X1 ’ 上的性能(错误率)。
(d)画出数据集X1 和X1 ’,已经每种方法得到对应参数向量W 的分界线。
Fisher线性判别图1 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数向量w = [-9.9406, 0.9030]’错误率error=0,感知器算法:图2 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[0.1;0.1];迭代次数iter=2参数向量w = [-4.8925, 0.0920]’错误率error=0图3 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[1; 1];迭代次数iter=2参数向量w = [-3.9925, 0.9920]’错误率error=0图4 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[10; 10];迭代次数iter=122参数向量w = [-5.6569, 7.8096]’错误率error=0图5 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[50; 50];迭代次数iter=600参数向量w = [-27.0945, 37.4194]’错误率error=0图6 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[50; 100];迭代次数iter=1190参数向量w = [-54.0048, 74.5875]’错误率error=0最小平方误差判别算法:图7 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[0.1; 0.1];参数向量w = [-0.1908, -0.0001]’错误率error=0图8 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[0.5; 0.5];参数向量w = [-0.1924, 0.1492]’错误率error=0图9 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[1; 0.5];参数向量w = [-0.1914, 0.0564]’错误率error=0图10 红色为第一类,绿色为第二类,直线为对应参数向量W的分界线,参数的初始值为[1; 1];参数向量w = [-0.1943, 0.3359]’错误率error= 0.00502.重复1.中的实验内容,数据集为X2 和X2 ’。

模式识别:线性分类器一、实验目的和要求目的:了解线性分类器,对分类器的参数做一定的了解,理解参数设置对算法的影响。
要求:1. 产生两类样本2. 采用线性分类器生成出两类样本的分类面3. 对比线性分类器的性能,对比参数设置的结果二、实验环境、内容和方法环境:windows 7,matlab R2010a内容:通过实验,对生成的实验数据样本进行分类。
三、实验基本原理感知器基本原理:1.感知器的学习过程是不断改变权向量的输入,更新结构中的可变参数,最后实现在有限次迭代之后的收敛。
感知器的基本模型结构如图1所示:图1 感知器基本模型其中,X输入,Xi表示的是第i个输入;Y表示输出;W表示权向量;w0是阈值,f是一个阶跃函数。
感知器实现样本的线性分类主要过程是:特征向量的元素x1,x2,……,xk是网络的输入元素,每一个元素与相应的权wi相乘。
,乘积相加后再与阈值w0相加,结果通过f函数执行激活功能,f为系统的激活函数。
因为f是一个阶跃函数,故当自变量小于0时,f= -1;当自变量大于0时,f= 1。
这样,根据输出信号Y,把相应的特征向量分到为两类。
然而,权向量w并不是一个已知的参数,故感知器算法很重要的一个步骤即是寻找一个合理的决策超平面。
故设这个超平面为w,满足:(1)引入一个代价函数,定义为:(2)其中,Y是权向量w定义的超平面错误分类的训练向量的子集。
变量定义为:当时,= -1;当时,= +1。
显然,J(w)≥0。
当代价函数J(w)达到最小值0时,所有的训练向量分类都全部正确。
为了计算代价函数的最小迭代值,可以采用梯度下降法设计迭代算法,即:(3)其中,w(n)是第n次迭代的权向量,有多种取值方法,在本设计中采用固定非负值。
由J(w)的定义,可以进一步简化(3)得到:(4)通过(4)来不断更新w,这种算法就称为感知器算法(perceptron algorithm)。
可以证明,这种算法在经过有限次迭代之后是收敛的,也就是说,根据(4)规则修正权向量w,可以让所有的特征向量都正确分类。
模式识别教学大纲模式识别是利用机器模仿人脑对现实世界各种事物进行描述、分类、判断和识别的过程,是信息科学和人工智能的重要组成部分。
模式识别与我们日常生活中所用到的智能技术息息相关,小到手机上的智能语音播报,指纹匹配和人脸识别,大到自动驾驶、医学检测、智能制造都用到了模式识别的相关算法和理论。
课程概述模式识别是一门与人工智能密切相关的专业课,本课程主要系统介绍模式识别的基本理论和方法,包括:模式识别的基本理论、监督模式识别中常用的线性和非线性分类器、非监督模式识别的分类器设计方法以及特征选择和提取的方法、分类器的评价方法等。
模式识别作为一门实践性很强的学科,授课的时候采用算法的理论讲解和实验演示相结合的方法来进行。
通过本课程的学习,不仅可以系统掌握模式识别的基本知识、理论和方法,了解模式识别的发展趋势和应用领域,还能够为将来进一步深入学习和研究模式识别和人工智能打下坚实的基础,帮助我们提高解决工程问题的能力。
授课目标模式识别作为一门实践性很强的学科,授课的时候采用算法的理论讲解和实验演示相结合的方法来进行。
通过本课程的学习,可以系统掌握模式识别的基本知识、理论和方法,了解模式识别的发展趋势和应用领域,不仅能够为将来进一步深入学习和研究模式识别和人工智能打下坚实的基础,还会帮助我们提高解决工程问题的能力。
课程大纲第一章绪论第一讲模式与模式识别第二讲模式识别的主要方法第三讲模式识别系统的应用举例第四讲模式识别系统的典型构成第一章绪论部分的单元测试第二章贝叶斯决策理论第一讲贝叶斯决策基础第二讲基于最小错误率的贝叶斯决策第三讲基于最小风险的贝叶斯决策第四讲贝叶斯分类器的设计第五讲正态分布时的统计决策第六讲matlab代码演示实例贝叶斯决策理论测试(一)贝叶斯决策理论单元测试(二)第三章概率密度函数的估计第一讲最大似然估计第二讲贝叶斯估计第三讲贝叶斯学习概率密度函数的估计的单元测试第四章线性分类器第一讲引言第二讲线性判别函数的基本概念第三讲Fisher线性判别第四讲Fisher线性判别matlab演示第五讲感知器算法第六讲感知器算法实例第七讲感知器算法matlab演示第八讲最小平方误差判别关于感知器算法和最小平方误差判别的测验关于fisher线性判别准则的测验第五章非线性分类器第一讲分段线性判别函数第二讲二次判别函数第三讲神经网络的基础知识和BP神经网络第四讲神经网络参数的确定第五讲多层神经网络在模式识别中的应用方法第六讲BP神经网络的matlab实例单元测试(一)单元测试(二)单元测试(三)第六章其他分类方法近邻法的测试第一讲近邻法原理第二讲快速搜索近邻法第三讲剪辑近邻法第四讲压缩近邻法第七章决策树第一讲决策树第二讲id3算法第三讲随机森林决策树的测试第八章非监督模式识别第一讲动态聚类方法第二讲分级聚类方法非监督模式识别测试题第九章特征选择和特征提取第一讲特征选择和提取的基本概念第二讲特征选择的判据第三讲特征选择的最优和次优算法第四讲特征提取的PCA算法第五讲K-L变换第六讲特征提取的matlab演示实例特征选择的测试题目特征提取的单元测试第十章模式识别系统的评价第一讲监督模式识别中错误率的估计方法第二讲监督模式识别中的交叉验证及自举法第三讲影响分类器性能估计的其它因素第四讲非监督模式识别系统性能的评价系统评价的测试预备知识具有一定的数学基础,掌握了线性代数以及概率论与数理统计两门课程涉及到的知识,如果有人工智能的相关基础就更好了!参考资料[1] 张学工《模式识别》(第3版),清华大学出版社,2010年。
《模式识别》课程教学大纲课程编号:04226课程名称:模式识别英文名称:Pattern Recognition课程类型:专业课课程要求:选修学时/学分:32/2 (讲课学时:28 实验学时:4)适用专业:智能科学与技术一、课程性质与任务模式识别课程是智能科学与技术专业的•门选修课,是研究计算机模式识别的基本理论和方法、应用。
模式识别就是利用计算机对某些物理现象进行分类,在错误概率最小的条件下,使识别的结果尽量与事物相符。
这门课的教学目的是让学生掌握统计模式识别和结构模式识别基本原理和方法。
本课程的主要任务是通过对模式识别的基本理论和方法、运用实例的学习,使学生掌握模式识别的基本理论与方法,培养学生利用模式识别方法、运用技能解决本专业及相关领域实际问题的能力,为将来继续深入学习或进行科学研究打下坚实的基础。
本课程的教学目的是为了使学生能应用模式识别处理计算机自动识别事物,机器学习数据分析中有关的技术问题。
由于本课程的目标是侧重在应用模式识别技术,因此在学习内容上侧重基本概念的讲解,辅以必要的数学推导,使学生能掌握模式识别技术中最基本的概念,以及最基本的处理问题方法。
学生在学习过程中还会用到一些概率论的最基本知识,线性代数中的部分知识,对学生在数学课中学到知识的进一步理解与巩固起到温故而知新的作用。
(该门课程支撑毕业要求中1.1, 2.1, 3.1, 3.3, 4.1, 6.1, 10.1和12.1)二、课程与其他课程的联系先修课程:概率论与数理统计、线性代数、机器学习后续课程:智能感知综合实践先修课程概率论与数理统计和线性代数为学生学习模式识别技术中最基本的概念,必要的数学推导打下基础,机器学习可以使学生建立整体思考问题的方法,并具有系统性能优化的概念。
本课程为后续智能优化方法打下理论基础。
三、课程教学目标1. 学习模式识别基本理论知识,理解参数估计的基本思想,掌握最大似然和贝叶斯儿种典型算法,理解聚类分析的的基本思想,掌握聚类分析的几种典型算法:(支撑毕业要求1.1,2.1)2. 具有数学分析和识别的基本能力;(支撑毕业要求1.1)3. 掌握基本的识别优化创新方法,培养学生追求创新的态度和意识;(支撑毕业要求3.1)4. 培养学生树立正确的分析和识别思想,了解设计过程中国家有关的经济、环境、法律、安全、健康、伦理等政策和制约因素;(支撑毕业要求3.3)5. 培养学生的工程实践学习能力,使学生具有运用标准、规范、手册、图册和查阅有关技术资料的能力;(支撑毕业要求4.1, 6.1)6, 了解模式识别方法前沿和新发展动向;(支撑毕业要求10.1, 12.1)四、教学内容、基本要求与学时分配五、其他教学环节(课外教学环节、要求、目标)无六、教学方法本课程以课堂教学为主,结合作业、自学及洲验等教学手段和形式完成课程教学任务。
《模式识别》课程实验线性分类器设计实验一、实验目的:1、掌握Fisher 线性分类器设计方法;2、掌握感知准则函数分类器设计方法。
二、实验内容:1、对下列两种情况,求采用Fisher 判决准则时的投影向量和分类界面,并做图。
12{(2,0),(2,2),(2,4),(3,3)}{(0,3),(2,2),(1,1),(1,2),(3,1)}T T T T T T T T T ωω⎧=⎪⎨=-----⎪⎩ 12{(1,1),(2,0),(2,1),(0,2),(1,3)}{(1,2),(0,0),(1,0),(1,1),(0,2)}T T T T T T T T T T ωω⎧=⎪⎨=-----⎪⎩ 2、对下面的两类分类问题,采用感知准则函数,利用迭代修正求权向量的方法求两类的线性判决函数及线性识别界面,并画出识别界面将训练样本区分的结果图。
12{(1,1),(2,0),(2,1),(0,2),(1,3)}{(1,2),(0,0),(1,0),(1,1),(0,2)}T T T T T T T T T T ωω⎧=⎪⎨=-----⎪⎩ 三、实验原理:(1)Fisher 判决准则投影方向:*112()w w S μμ-=-(2)感知准则函数:()()kT p z Z J v v z ==-∑当k Z为空时,即()0J v ,*v即为所求p四、解题思路:1、fisher线性判决器:A.用mean函数求两类样本的均值B.求两类样本的均值的类内离散矩阵SiC.利用类内离散矩阵求总类内离散矩阵SwD.求最佳投影方向WoE.定义阈值,并求得分界面2、感知准则函数分类器:A.获得增广样本向量和初始增广权向量B.对样本进行规范化处理C.获得解区,并用权向量迭代修正错分样本集,得到最终解区五、实验结果:1、fisher线性判决分类器:条件:取pw1=pw2=0.5,阈值系数为0.5A.第一种情况B.第二种情况2、感知准则函数判决:条件:取步长row为1判决结果:六、结果分析:1、fisher线性判决器中,调整阈值系数时,分界面会随之平行上下移动,通过调整阈值系数的大小,就能比较合理的得到分界面。