酿酒葡萄激振机构驱动结构的设计与分析
- 格式:pdf
- 大小:2.05 MB
- 文档页数:4
PJZ-1型酿酒葡萄剪枝机设计与试验董祥;张铁;严荷荣;李永强;张健飞【摘要】我国酿酒葡萄栽培面积逐年增加,因气候条件酿酒葡萄进入冬季前需要进行剪枝作业,目前冬季剪枝作业主要以人工修剪为主,存在劳动强度大、效率低和成本高等问题.设计了一种适于酿酒葡萄冬季埋藤前的机械化修剪机具,该机主要由机架、自动避障装置和液压驱动的旋转式剪枝装置等组成.试验选取3年株龄的赤霞珠品种作为试验对象,以割刀转速和作业速度为试验因素进行酿酒葡萄田间剪枝试验.试验结果表明:当机具作业速度3.0 km/h,割刀转速2 000 r/min时,剪断率为98.3%;当机具作业速度3.0 km/h,割刀转速>2 500 r/min时,剪断率为100%;当机具作业速度1.0 ~ 2.0 km/h,割刀转速2 000 r/min时,剪断率为100%;当作业速度4.0 km/h时,机具对酿酒葡萄剪枝作业的时间利用率86.4%时,机具的平均作业效率为0.05 hm2/h.该机具的各项性能指标均达到了设计要求,可有效地调节酿酒葡萄修剪的高度和宽度,并且具有自动避障功能,割刀转速2 000~3 000 r/min,作业速度1.0 ~5.0km/h时,可以获得较高的枝条剪断率.【期刊名称】《农业工程》【年(卷),期】2018(008)005【总页数】6页(P95-100)【关键词】酿酒葡萄;冬季剪枝;剪枝机;试验【作者】董祥;张铁;严荷荣;李永强;张健飞【作者单位】中国农业机械化科学研究院,北京100083;现代农装科技股份有限公司,北京100083;中国农业机械化科学研究院,北京100083;现代农装科技股份有限公司,北京100083;中国农业机械化科学研究院,北京100083;沈阳农业大学工程学院,沈阳110161【正文语种】中文【中图分类】S224.90 引言自我国加入世界贸易组织以来,葡萄酒产品进口量迅速增长,给国内葡萄酒产业造成巨大的压力,葡萄酒生产以及作为主要原料的酿酒葡萄也随之备受重视[1-3]。
·63·种 植 技 术中国农业文摘·农业工程 2016年第5期喷洒最为重要,另外就是做好果园的通风,对于腐烂的果实要及时的进行清理,避免形成传染和病虫害的扩大。
夏季果园的病虫害防治是果树防治病虫害最为关键的季节,要在果树开花之前及时的喷打波美5度石硫合剂,以有效控制腐烂病的发生蔓延,抑制红蜘蛛的越冬繁殖,同时清理果园的杂草和病虫果,修剪病残枝等。
冬季的防治主要是针对害虫和病原菌进行防治,要对果树进行刮皮,破坏害虫的越冬场所,同时给予相应的水肥管理,增加营养供给,提高果树的抗病虫能力[3]。
3 结语笔者希望更多的专业人士能投入到该课题研究中,针对文中存在的不足,提出指正建议,为做好果树的病虫害防治工作提供更为积极的建议和防治措施。
参考文献[1] 李瑞营,史良.论果树病虫害的科学防治[J].现代农业,2009,(8):24.[2] 路明花.北方果树病虫害的科学防治要点[J].今日科苑,2010,(18):236.[3] 盖禹含,张立业,陈雪.浅谈果树病虫害综合防治技术研究[J].生物技术世界,2014,(2):47.酿酒葡萄振动分离机理及装置的研究李成松新疆独特的光热和水土条件非常适合葡萄的生长,生产的葡萄具有品质好、单产高、营养丰富等特点,具有其他葡萄产区无法比拟的独特优势。
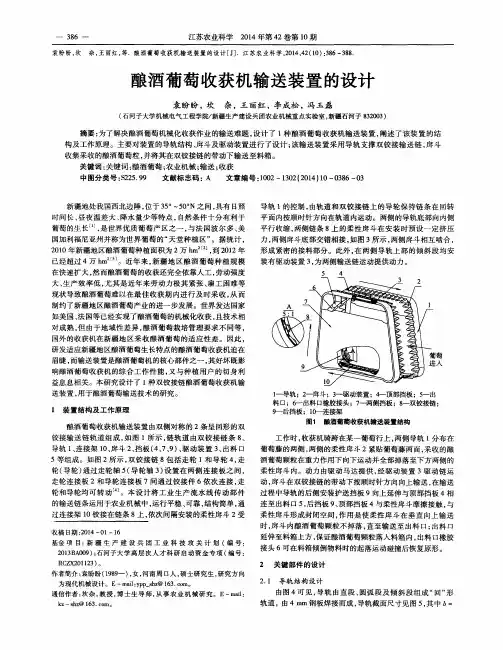
近年来,新疆依托优势资源进行农业结构调整,酿酒葡萄种植面积、产量大幅提高,但目前葡萄收获还完全依靠人工,严重阻碍了酿酒葡萄产业的发展,迫切需要采收的机械化。
以新疆种植面积最大的赤霞珠为研究对象,针对酿酒葡萄多主蔓扇形树形、长宽叶幕形的生长与管理特点,对振动分离机理进行了研究,获得了葡萄果-蒂振动分离条件,设计试制出了振动分离装置,并进行了试验研究,试验结果表明振动分离装置满足工作要求。
研究结果为新疆酿酒葡萄采收机械化奠定了理论和技术基础。
主要研究内容及结论:(1)针对新疆酿酒葡萄的多主蔓扇形树形、高宽单壁直立叶幕形等栽培管理特点进行了研究,获得了酿酒葡萄种植行距3.0~3.3 m,叶幕形高度1.5~2.0 m,宽度0.8 m,修剪高度0.5 m,葡萄串在垂直方向分布范围为500~1600 mm;试验研究了葡萄果-蒂连接力,确定了果-蒂连接力范围为5~13 N,为装置外形尺寸设计及葡萄振动分离机理的揭示奠定了基础。
酿酒设备机构分析方案
一、背景
随着酒类市场的不断扩大,酿酒设备需求量也在不断增加。
而作为酿酒设备的核心组成部分,机构的性能和稳定性对酿酒的质量和成本有着至关重要的影响。
因此,对酿酒设备的机构进行分析和优化,对提升酿酒质量、降低生产成本意义重大。
二、分析方案
1. 定义机构类型
首先需要对酿酒设备的机构进行分类和定义,目前酿酒设备中最常用的机构主要包括:
•传统机构
•液压机构
•电动机构
•液体驱动机构
2. 机构性能测试
针对不同类型的机构,需要进行性能测试,包括功率、扭矩、转速、效率等指标的测试。
通过测试得到各种机构的性能数据,为后续分析提供基础数据。
3. 动态分析
针对各种机构的数据,进行动态分析。
运用适当的分析方法,包括等效曲线法、力矩分析法等,进行机构运动特性、负载能力等方面的分析,评估各种机构的优缺点。
4. 组合优化
将不同类型的机构进行组合,对组合后的机构进行性能测试和动态分析。
通过组合实验以及不同负载条件下的性能测试,确定不同机构组合方式下酿酒设备的最佳机构方案。
三、未来展望
通过对酿酒设备机构的分析与优化,可以降低生产成本、提高酿酒质量,对于促进酒类市场的进一步发展有着积极的推动作用。
而随着科技的发展,未来更加先进、高效的酿酒设备机构的研发将会是一个重要的研究方向。
酿酒设备机构分析方案一、背景介绍随着人们消费水平不断提高,酿酒行业成为了一个快速发展的产业。
而在酿酒过程中,酿酒设备起着不可忽视的作用。
因此,研究酿酒设备的结构和性能对于提高酿酒的质量和工艺的稳定性具有重要意义。
二、目的和意义本文旨在从酿酒设备的机构角度出发,分析酿酒设备的结构,进而探究其原理和性能,提出改进方案,以期对酿酒设备的设计和改进提供一些思路。
通过提高酿酒设备的质量和技术水平,促进酿酒行业的发展和进步。
三、酿酒设备的结构和原理在酿酒设备中,最基本的组成部分有酿酒罐、酿酒桶、酿酒管道、酿酒冷却装置等,这些设备的结构和原理都各具特点。
首先是酿酒罐。
酿酒罐主要由罐体、罐盖、进出料口、搅拌设备等组成。
酿酒罐的设计需要考虑酒液承受压力,保证在高压下不会变形。
同时,还需要考虑酿酒过程中的温度变化,以便不影响酿酒的质量。
其次是酿酒桶。
酿酒桶主要由桶体、桶盖、取样口等构成。
酒液在酿酒桶中需要进行发酵、陈酿等过程,因此需要保证桶体材质优良,不影响酒液的品质,同时还需要考虑酿酒过程中的温度控制。
酿酒管道的设计也很重要。
酿酒管道需要保证管路畅通,材料无毒无害,不会影响酒液的品质。
同时,还需要考虑管道的维修和清洗,方便清洗人员的操作。
酿酒冷却装置是保证酿酒质量的重要因素之一。
酿酒过程中需要进行冷却,以保证酒液不会过热,否则容易导致酿酒质量下降。
酿酒冷却装置主要由散热器和冷却管组成,其设计需要考虑到酿酒的工艺流程和酒液的特性。
四、改进措施在酿酒设备的设计和改进中,应该考虑到酿酒行业不断发展和进步的趋势,通过加强科技研发和技术创新,提高酿酒设备的性能和质量。
在酿酒罐的设计中,可以采用优质不锈钢材质,并加强罐体的厚度,以带来更好的抗压性能,减少罐体变形的风险。
在酿酒桶的设计中,可以考虑采用具有良好保湿性能的材料,避免酒液因为外部的温度变化而对酿酒质量产生影响。
在酿酒管道的设计中,可以考虑采用光滑内壁的管道,以便于清洗。
酿酒设备机构分析方案摘要随着酒类市场的不断扩大和人们生活水平的不断提高,酿酒行业日益受到关注。
在酿酒过程中,酿酒设备起着至关重要的作用,其结构和性能对酒类质量及生产效率均有着重要影响。
本文旨在通过对酿酒设备机构进行分析,提出可行性维修和改进方案,以提高其生产效率和质量。
介绍酿酒设备是指专用于酿造各类酒类的机器设备。
在酿造酒类的过程中,酿酒设备的结构和性能对酒类的质量和生产效率有着直接的影响。
因此,对酿酒设备机构进行分析,对于酿酒工艺改进和质量提升具有重要意义。
酿酒设备机构分析酿酒罐酿酒罐是酿酒设备中的主要组成部分之一,被广泛地应用于各类酒类的酿造过程中。
酿酒罐的主要结构包括罐体、罐盖、支架等部分。
罐体是酿酒罐的主要组成部分,它是由不锈钢板制成的,具有极高的耐腐蚀性和抗压性。
罐盖则是用于开合罐口,保持酿酒罐内部的封闭性和温度恒定性。
酿酒管道是酿酒设备中的主要输送部件之一,具有重要的作用。
酿酒管道主要分为进料管道和出料管道,其结构包括管体、法兰、密封垫圈等部分。
酿酒管道的材料通常为不锈钢,具有优良的耐腐蚀性和耐高温性。
酿酒设备净化器酿酒设备净化器主要是用于对酿酒液物质进行净化和过滤,其结构主要包括框架、滤网和滤纸等部分。
净化器一般采用不锈钢材质,具有较高的强度、耐腐蚀性和防腐性。
酿酒冷却器酿酒冷却器是一种用于冷却酿酒液的设备,其结构包括散热器、水冷却器、冷却管和夹套等部分。
酿酒冷却器一般采用不锈钢材质,具有优良的耐腐蚀性和散热性能。
酿酒设备维修和改进方案维修方案对于酿酒罐等设备,可以通过定期进行保养和维修来延长使用寿命和提高生产效率。
具体操作可以包括清洗内部杂质、更换损坏零部件、检查密封性等。
对于酿酒管道和冷却器等设备,可以采用新型的材料和结构设计来提高其性能。
例如,可以采用陶瓷涂层、复合材料等进行改进,提高其耐磨性、耐腐蚀性和散热性。
结论通过对酿酒设备机构的分析,可以看出其结构和性能对酒类质量及生产效率有着重要影响。
酿酒设备机构分析方案酿酒设备是酿造酒类产品的重要工具之一,其结构和规格对酒类产品的品质、口感和产量都有着重要的影响。
本文旨在分析酿酒设备的机构组成及其影响因素,为酿酒企业的酿酒设备选型和维护提供参考。
酿酒设备的机构组成酿酒设备主要包括以下机构部件:发酵罐发酵罐是酿酒设备中最重要的部件之一,其主要作用是进行酒精发酵。
发酵罐的材质通常为不锈钢和陶瓷,其制造工艺、容积大小、形状等都会对酒的品质、口感产生影响。
蒸馏器蒸馏器是酿酒设备中用于提纯酒精的部件,其主要分为简单蒸馏器和复杂蒸馏器两种类型。
蒸馏器的材质、结构和精度都会对蒸馏酒的酒精度、口感和香气产生影响。
水循环系统水循环系统是酿酒设备中用于保持发酵罐、蒸馏器和酒库温度的部件。
其主要由水泵、水箱、水管等组成。
水循环系统的效率和精度会对酒的发酵效果、口感产生影响。
粉碎机粉碎机是酿酒设备中用于破碎原料的部件。
其主要分为震动粉碎机和滚轮粉碎机两种类型,其规格、结构和效率都会对原料的破碎度、粉碎度和酿酒成本产生影响。
传动系统传动系统是酿酒设备中用于传递动力的部件。
其主要由齿轮、带轮、机座等组成。
传动系统的材料、结构和耐久度都会对整个设备的运转效率、精度和使用寿命产生影响。
酿酒设备的影响因素除了机构组成,酿酒设备的影响因素也非常关键。
以下列举几个重要的影响因素:原料酿酒设备的工艺和效率都是基于原料的,原料的种类、质量、数量和沟通方式都会对酒的品质、产量产生重要影响。
工艺流程酿酒设备的主要用途是完成酿酒的过程,而酿酒的过程需要遵循一定的工艺流程。
不同的酿酒工艺流程会导致不同的酿酒效果,影响着设备的性能和酒的口感。
设备维护设备的使用寿命和运行效率都需要得到保证,设备的维护及维修是非常重要的。
定期维护设备,检查机械零件的状况,及时清洗和更换设备上的易损件,可以提高设备的效率和使用寿命,确保酿酒质量。
结语本文从酿酒设备的机构组成、影响因素展开分析,提供对酿酒设备选型和维护的参考。
酿酒设备机构分析方案引言随着人们生活水平的不断提高,酿造酒类饮品已经成为了一项常见的消费行为。
酿酒从古至今一直都是一种重要的文化遗产,也是一种高度技术含量和高度劳动密集型的行业。
而酿造高质量的酒类饮品离不开先进的酿酒设备。
本文将主要从酿酒设备机构的角度,对酿酒过程中的设备机构进行分析,旨在提高酿酒工艺效率,提高酒类产品的质量。
酿酒设备机构分析压榨机压榨机是提取原料中的汁液的主要设备。
一般来说,压榨机具有结构简单、使用方便和效率高等特点。
在压榨机中,压力和温度的控制是非常重要的,影响着萃取率和汁液的质量。
为了保证压榨机的高效稳定运行,还需要对其性能进行定期维护和检测。
发酵罐发酵罐是酿造酒类饮品中用来储存酒的主要设备。
在发酵罐内,半液态的酒料体系通过微生物发酵后,最终生成可供消费的酒精饮品。
发酵罐在性能方面应具备良好的密封、透气性、温度调节性等特点。
同时,酿酒过程中还需要对罐内环境进行严格的控制,如酒精浓度、酸碱度、菌种数量等,以达到最终酿造出理想的酒类饮品。
蒸馏机蒸馏机是将酒精提纯的主要设备之一。
其通过加热并凝聚酒精蒸汽,将原始酒中的不纯物质、微生物等去除,从而提高了酒的酒精度和清澈度。
蒸馏机在性能方面应具备良好的温度控制、蒸馏效率和节能性等特点。
存储桶存储桶是将纯净的酒液储存并稳定存放的必要设备。
存储桶在性能方面应具备良好的密封性、防腐性和调温性等特点。
在酒类饮品储存过程中,有效地控制酒类饮品的温度和湿度等因素,有助于保证酒类饮品的质量,同时降低酒类饮品的损失。
结语酿酒设备的机构是酿酒过程中一个至关重要的组成部分。
通过对酿酒设备机构的实际应用分析,可以帮助人们更好地了解和把握酿酒过程中的关键环节,提高酒类饮品的酿造效率和品质。
最后建议,酿酒设备的机构的选择和维护应该充分考虑酒类饮品的特点和质量标准,以确保酿制出的酒类饮品品质更加优良。
酿酒葡萄修剪装置的设计王哲;王丽红;付威;江英兰;坎杂;李成松【摘要】Wine grape pruning operations directly affect the yield and quality of wine grapes. In this paper,according to the problems of labor intensity,low efficiency and high cost of Xinjiang wine grape,a wine grape trimming device is de-signed in combination with the planting pattern and trimming requirements of Xinjiang wine grape. Trimming device struc-ture and working principle of the machine is introduced in this paper,and the motion analysis of rotating cutter. The theo-retical analysis shows that when the speed of the tractor is 6km/h, the rotating cutter head radius is20mm, the blade height of 20mm, number of blade is 4, the rotational speed of rotating cutter head for 2000r/min,the trimming device can meet the requirements of wine grape pruning. Through the hydraulic simulation software AMESim simulation analysis was carried out on the pruning device of the hydraulic system, proved the feasibility of pruning device of the hydraulic system.%酿酒葡萄修剪作业直接影响酿酒葡萄的产量和品质。
酿酒设备机构分析方案背景随着社会的发展和人们的文化生活水平的提高,越来越多的人开始重视饮食文化的传承和发展。
其中,酒类饮品因其独特的口感和文化内涵,备受消费者青睐。
因此,如何生产出口感独特、品质稳定的酒类产品,已成为酒类生产企业关注的重点问题。
而酿酒设备是直接影响酒类产品质量的重要因素之一。
目的本文旨在通过对酿酒设备机构进行分析,为酒类生产企业提供优化生产流程和提升酒类产品质量的具体方案。
分析酿酒设备机构主要由以下几个部分组成:1.发酵罐2.滤清器3.管道系统4.温度控制系统5.压力调节系统发酵罐发酵罐是酿酒过程中最关键的设备之一,它主要负责将麦汁和酵母进行自然发酵,使其转化为酒精和二氧化碳。
发酵罐的选材应优先考虑其防腐、不易污染并且易于清洗和维护。
滤清器滤清器是在酿酒过程中用于过滤杂物和残渣的设备。
其中,压力式滤器的过滤效率较高,能滤出较多的细小颗粒物质,但需要定期更换滤网。
而离心式滤器则能快速分离液体和固体的混合物,但所需设备较为复杂。
管道系统管道系统是酿酒设备中较为复杂的一个部分,它是将各个设备进行连接的关键。
为了避免管道内产生物料堵塞或者杂质混入,管道的连通处需要采用卡套或卡环连接,并保证其密封性。
另外,管道内部的清洗和维护也需要严格把控。
温度控制系统温度控制系统主要负责控制发酵罐内部的温度,以促进酵母的生长和促使发酵过程更为稳定。
一般来说,温度控制系统需要能够实时测量温度并对其进行控制,以满足不同阶段的生产要求。
压力调节系统压力调节系统主要是为了保证酒类产品的口感和气泡度,在不同阶段的制酒过程中需要提供不同的压力支持。
方案建议为了优化酿酒设备机构,提升酒类产品质量,建议:1.选择符合质量标准和生产要求的优质发酵罐材料,并进行适时清洗和维护,以保证酿酒质量;2.根据生产质量要求,采用不同类型的滤清器和过滤网;3.采用卡套或卡环连接,注意管道的密封性及其内部清洗和维护;4.选择有效的温度控制系统,满足不同阶段生产的温度要求;5.根据制酒过程要求,提供相应的压力调节系统。
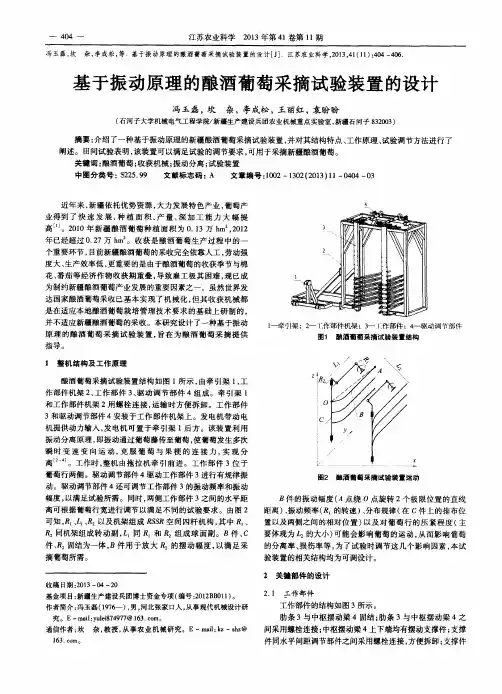
酿酒葡萄激振机构驱动结构的设计与分析袁盼盼ꎬ朱兴亮ꎬ张学军ꎬ尤㊀佳(新疆农业大学机电工程学院ꎬ乌鲁木齐㊀830052)摘㊀要:利用RSSR空间四杆机构动态性能好㊁能产生理想复杂空间运动轨迹及结构紧凑等优点ꎬ针对酿酒葡萄采收ꎬ设计了一种基于RSSR空间四杆偏心激振机构的驱动结构ꎬ该机构为一对曲柄呈180ʎ㊁其余杆件对称布置的并联设计ꎮ对空间RSSR四杆机构进行了运动分析ꎬ获得了输出摆动角位移方程ꎬ基于Adams建立了并联RSSR空间四杆机构的运动学模型ꎬ并通过仿真分析得到运动的变化规律ꎮRSSR空间四杆机构的参数与设计结果满足振动采收机构的运动要求ꎬ为酿酒葡萄收获机的研发奠定了基础ꎮ关键词:酿酒葡萄ꎻ振动采收ꎻRSSR机构中图分类号:S225.99ꎻTH122㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2019)03-0099-040㊀引言空间RSSR机构是含两个转动副(R)和两个球面副(S)的空间铰链四杆机构ꎬ利用空间连杆可使从动杆件得到预定的位置㊁行程或某种运动规律ꎬ也可使连杆上某点获得预定的轨迹[1-2]ꎮ空间RSSR四杆机构传动具有精度高㊁传动平稳㊁振动小㊁机构紧凑㊁可用于大跨度远距离的力(转矩)和运动的传输㊁抗冲击力强ꎬ以及可用少量杆件实现复杂运动等突出优点[3-4]ꎮ周啸等将RSSR空间连杆机构组合成4RSSR空间连杆机构应用在舵机上ꎬ当连杆机构输入一定角度时ꎬ实现舵机4个舵翼同时偏转相同的角度[5]ꎮ杨传民等将空间四杆RSSR机构和RRLP机构空间组合作为给袋式包装机撑袋工位的执行机构[6]ꎬ可以精准㊁平稳地完成撑袋所需的运动轨迹ꎮ秦忠宝等根据空间RSSR机构的刚体导引实现了搅拌机粉碎㊁混料及造粒同步进行的多功能[7]ꎮ何勇等将空间RSSR机构和球面4R转化应用在高速剑杆织机的空间引纬机构[8]ꎮ王萌等对空间可调RSSR机构建立位移㊁速度及加速度方程ꎬ通过遗传算法建立数学优化模型[9]ꎮ古玉锋等研究了某8ˑ4型重卡双前轴转向杆系可分解为6个空间RSSR四杆机构ꎬ建立该转向杆系的空间结构非线性模型[10]ꎮ收稿日期:2017-10-24基金项目:国家自然科学基金项目(51605411)ꎻ新疆农业大学校前期资助课题(XJAU201513)作者简介:袁盼盼(1989-)ꎬ女ꎬ河南周口人ꎬ讲师ꎬ硕士ꎬ(E-mail)ypp_xnd@163.comꎮ目前ꎬ对RSSR空间四杆机构的研究主要应用于工业㊁航空㊁纺织等工程机械的操纵系统中ꎬ但其在农业工程林果振动采收技术方面的研究应用很少[11-13]ꎮ为此ꎬ利用RSSR空间四杆机构承载能力大㊁动态性能好㊁能产生理想复杂空间运动轨迹及结构紧凑等优点ꎬ针对酿酒葡萄采收ꎬ设计了一种基于并联RSSR空间四杆偏心激振机构的驱动结构ꎬ并对其运动特性进行分析ꎮ1㊀RSSR空间四杆机构设计拟设计的酿酒葡萄偏心激振采收机构驱动结构ꎬ如图1所示ꎮ1.主动轴㊀2.锁紧螺母㊀3.偏心套㊀4.连杆5.振动摇杆转动轴㊀6.杆端关节轴承㊀7.振动摇杆图1㊀振动分离机构驱动结构图Fig.1㊀Structurediagramofthevibrationseparationmechanismdrivepart该机构由一对曲柄呈180ʎ㊁其余杆件对称布置的并联RSSR空间四杆机构ꎬ主要零部件组成为主动轴㊁偏心套㊁连杆㊁振动摇杆转动轴㊁杆端关节轴承ꎬ以及2019年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期与主动摇杆转动轴固接的振动摇杆ꎮ其中ꎬ偏心套反向布置ꎬ当转动轴转动时ꎬ偏心套作位移和速度相等㊁方向相反的往复运动ꎬ驱动结构相同㊁对称布置的左右两组振动采摘杆作方向相同㊁振幅相等的运动ꎮ图2为振动分离机构驱动部分结构简图ꎮ其中ꎬL1㊁L2㊁L3以及机架组成RSSR空间四杆机构ꎬ驱动部分为两并联RSSR空间四杆机构ꎻF㊁G为RSSR机构中的两个球面副ꎮ图1中的主动轴对应RSSR机构曲柄L1的转动轴ꎬ偏心套对应L1杆件ꎬ连杆对应L2杆件ꎬ振动摇杆对应L3杆件ꎬ振动摇杆转动轴对应O轴ꎬ曲柄L1与连杆L2㊁连杆L2与振动摇杆L3之间的连接为球铰接(球面副)ꎬ采用杆端关节轴承作为实现三者之间球铰接的连接件ꎮ工作时ꎬ由电机或液压马达从主动轴的一端输入动力ꎬRSSR空间四杆机构将主动轴的旋转运动转换为振动摇杆的摆动运动ꎬ并通过振动摇杆转动轴将摆动运动传递至振动采收机构中的工作部分ꎮ图2㊀振动分离机构驱动结构简图Fig.2㊀Schematicdiagramofthevibrationseparationmechanismdrivepart振动采收机构驱动结构由两个空间RSSR机构并联组成ꎬRSSR空间四杆机构示意图ꎬ如图3所示ꎮ其中ꎬO点为坐标原点ꎬEF杆为输入杆件ꎬGH杆为输出杆件ꎬ与采收机构肋条组件固连ꎬFG杆为连杆ꎬEOH为机架ꎬ与X-Y轴形成平面重合ꎻOE㊁EF㊁FG㊁GH分别对应为L0㊁L1㊁L2㊁L3㊁L4ꎻZ1和Z2轴线间的夹角α=90ʎꎻθ0为EF输入杆的转角ꎻθ1为GH输出杆件的转角ꎮ根据文献[14]可知Asinθ1+Bcosθ1+C=0(1)A=cosαsinθ0-L0sinα/L1(2)θ0=ωt(3)B=L4/L1-cosθ0(4)C=L24+L21-L22+L23+L20()/2L1L3-L4cosθ0/L3(5)将式(2)~式(5)代入式(1)求解ꎬ可得到输入角与输出角位移θ1存在以下关系θ1=ʃ2arctan-A+A2+B2-C2C-B(6)式(6)表明:当给定输入杆一个初始位置时ꎬ得到输出杆会有两个可能的位置ꎬ具体数值按照运动连续性和机构装配方案确定ꎮ图3㊀空间RSSR机构Fig.3㊀SpatialRSSRmechanism当驱动部分曲柄EF与X-Y的平面重合时ꎬ输出角位移θ1(t)可表示为θ1(t)=ʃ2arctan-A(t)+A2(t)+B2(t)-C2(t)C(t)-B(t)(7)2㊀RSSR空间四杆机构运动仿真2.1㊀RSSR空间四杆机构模型的建立在不影响机构性能的前提下ꎬ对机构的实际模型进行简化ꎬ将驱动部分的RSSR空间四杆机构简化为3根杆件和地面ꎬ如图4所示ꎮ在Adams/View的交互界面下ꎬ根据图1中的设计和初始杆长及参数ꎬ建立RSSR空间四杆机构的Adams模型ꎬ如图5所示ꎮ在相邻构件之间添加约束副ꎬ连杆与主动轴采用球副连接ꎬ连杆的另一端与振动摇杆也采用球副连接ꎬ振动摇杆转动轴与大地之间添加转动副ꎬ在输入主动轴与大地之间添加转动副和转动驱动ꎮ添加完成载荷㊁约束㊁驱动等后ꎬ对机构的约束类型㊁数量㊁冗余方程个2019年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期数㊁机构自由度及模型进行检查ꎬ并对模型进行修正ꎬ完成自检ꎮ图4㊀RSSR空间四杆机构仿真结构简图Fig.4㊀SimulationstructureofthespatialRSSRmechanism图5㊀RSSR空间四杆机构的Adams模型Fig.5㊀AdamsmodelofthespatialRSSRmechanism2.2 运动学仿真及分析在设计的RSSR空间四杆驱动结构ꎬ在主动转轴和偏心套(曲柄)形成的转动副处添加旋转驱动ꎬ转速为750r/minꎬ即为4500d/sꎬ曲柄旋转1周ꎬ需要的时间为0.08sꎮ设置仿真时间为0.16sꎬ步长为1000步ꎮ输出振动摇杆角度变化曲线如图6所示ꎮ由图6可知:振动摇杆的角度变化浮动范围为(-7.3~+5.9)ʎꎬ在运动的起始位置时ꎬ振动摇杆角度为0ʎꎬ运动周期T=0.08sꎮ振动摇杆角速度㊁角加速度变化曲线如图7和图8所示ꎮ图6㊀振动摇杆角度变化曲线Fig.6㊀Anglechangecurveofthevibrationrocker图7㊀振动摇杆角速度变化曲线Fig7㊀Angularvelocitychangecurveofthevibrationrocker图8㊀振动摇杆角加速度变化曲线Fig.8㊀Angularaccelerationchangecurveofthevibrationrocker在RSSR机构运动的起始和终止位置的角速度绝2019年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期对值最大ꎬ最大值为518(ʎ)/sꎬ在水平位置时的角速度为0ꎻ在运动的起始和终止位置的加速度为0ꎬ在水平位置时的加速度绝对值为最大ꎮ3㊀结论1)设计了一种适合于酿酒葡萄采收的RSSR空间四杆偏心激振机构的驱动结构ꎬ对其工作原理及特点进行了分析ꎬ并获得了输出摆动角位移模型ꎮ2)建立了RSSR空间四杆机构的Adams模型ꎬ获得了RSSR空间四杆输出杆件的角位移㊁角速度㊁角加速度随时间的变化规律ꎮ参考文献:[1]㊀MedAmineLaribiꎬLotfiRomdhaneꎬSaidZeghloul.Analysisandoptimalsynthesisofsingleloopspatialmechanisms[J].JournalofZhejiangUniversity-ScienceA:AppliedPhysics&Engineeringꎬ2011ꎬ12(9):665-679.[2]㊀华大年ꎬ唐之伟.机构分析与设计[M].北京:纺织工业出版社ꎬ1985.[3]㊀刘诗汉ꎬ张文军.基于线性输入输出关系的空间连杆机构设计[J].机械传动ꎬ2012ꎬ36(8):71-73. [4]㊀阮龙欢ꎬ侯宇ꎬ李诗雷ꎬ等.两自由度仿生扑翼飞行机器人设计与运动分析[J].机械设计与制造ꎬ2017(6):241-244.[5]㊀周啸ꎬ宋梅利ꎬ王晓鸣ꎬ等.RSSR空间机构的运动分析和优化设计[J].机床与液压ꎬ2015ꎬ43(9):1-4. [6]㊀杨传民ꎬ汪浩ꎬ刘铭宇ꎬ等.给袋式包装机撑袋空间组合机构的运动分析[J].包装工程ꎬ2014ꎬ35(5):35-40. [7]㊀秦忠宝ꎬ房亚东ꎬ何卫平ꎬ等.基于空间RSSR机构的多功能搅拌机及其参数化设计[J].制造业自动化ꎬ2005ꎬ27(1):5-8.[8]㊀何勇ꎬ顾玉莲ꎬ吴兴培.空间RSSR机构向球面4R机构的转化[J].机械工程学报ꎬ2009ꎬ45(10):30-35. [9]㊀王萌ꎬ林光春ꎬ安帅伟.基于运动分析和受力分析的空间可调机构RSSR优化设计[J].制造业自动化ꎬ2013ꎬ35(12):100-103.[10]㊀古玉锋ꎬ吕彭民ꎬ单增海ꎬ等.转向杆系空间结构非线性建模与分析[J].农业机械学报ꎬ2014ꎬ45(10):7-14. [11]㊀袁盼盼ꎬ张学军ꎬ坎杂ꎬ等.末端驱动式酿酒葡萄分离机构的设计及分析[J].农机化研究ꎬ2016ꎬ38(9):104-107.[12]㊀李成松ꎬ高振江ꎬ坎杂ꎬ等.双支撑酿酒葡萄果实振动分离装置作业机理[J].农业工程学报ꎬ2015ꎬ31(4):26-32.[13]㊀冯玉磊ꎬ坎杂ꎬ李成松ꎬ等.基于振动原理的酿酒葡萄采摘试验装置的设计[J].江苏农业科学ꎬ2013ꎬ41(11):404-406.[14]㊀张启先.空间机构的分析与综合[M].北京:机械工业出版社ꎬ1984.DesignandKinematicAnalysisofExcitationMechanismDriveStructureBasedonSpatialRSSR4-linkYuanPanpanꎬZhuXingliangꎬZhangXuejunꎬYouJia(CollegeofMechanicalandElectricalEngineeringꎬXinjiangAgriculturalUniversityꎬU ru mqi830052ꎬChina)Abstract:UseofthegooddynamicperformanceꎬidealcomplexspacemovementtrajectoryandcompactstructureofRSSRspacefour-barmechanismꎬadrivingstructurebasedonRSSRspacefour-bareccentricexcitationmechanismwasdesignedforwinegrapeharvesting.Apairofcranks180ʎandtherestofthebarsymmetricalarrangementparallelweredesigned.ThemotionanalysisofthespaceRSSRfour-barmechanismwascarriedoutꎬandtheoutputswingangledis ̄placementequationwasobtained.ThekinematicsmodelofquadrilateralmechanismofparallelRSSRspacewasestab ̄lishedbasedonAdamsꎬandthevariationlawofmotionwereobtainedbysimulation.Theparametersanddesignofthefour-barmechanismoftheRSSRspacemeettherequirementsofthevibrationharvestingmechanismꎬwhichlaysthefoundationforthedesignandresearchofthewinegrapeharvestingmachine.Keywords:winegrapeꎻvibrationharvestingꎻRSSR2019年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期。