ABB机器人学习课件--RobotStudio
- 格式:pptx
- 大小:5.94 MB
- 文档页数:103



目录•机器人基础知识•abb机器人概述•机器人基本操作与编程•机器人高级操作与维护•机器人集成与应用案例•机器人安全与防护知识机器人基础知识机器人的定义与分类机器人的定义机器人是一种能够自动执行任务的机器系统。
它可以接受人类指挥,也可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
机器人的分类根据机器人的应用环境和功能特点,机器人可分为工业机器人、服务机器人、特种机器人等。
0102 03第一代机器人示教再现型机器人,主要由机器手控制器和示教盒组成,可按预先引导动作记录下信息重复再现执行。
第二代机器人感觉型机器人,如具有视觉、触觉、听觉等外部传感器,能实际检测工作环境变化给机器人反馈信号,控制其操作机构。
第三代机器人智能型机器人,是第二代机器人的发展,具有多种感知功能,可进行复杂的逻辑思维、判断和决策,在作业环境中独立行动。
机器人的发展历程ABDC工业制造领域机器人在工业制造领域的应用非常广泛,如焊接、装配、喷涂、搬运等。
它们可以提高生产效率、降低生产成本、提高产品质量等。
医疗卫生领域机器人在医疗卫生领域的应用也越来越多,如手术机器人、康复机器人、护理机器人等。
它们可以协助医生进行手术操作、帮助患者进行康复训练、提供日常的护理服务等。
军事领域机器人在军事领域的应用也越来越受到关注,如无人侦察机、无人战斗机、排爆机器人等。
它们可以执行高风险的任务、提高作战效率、减少人员伤亡等。
服务领域机器人在服务领域的应用也越来越多,如餐厅服务员、导游讲解员、智能家居等。
它们可以提供便捷的服务、提高服务质量、改善人们的生活品质等。
机器人的应用领域abb机器人概述abb机器人简介领先的工业机器人技术ABB作为全球领先的工业机器人制造商,提供先进的机器人技术和解决方案。
广泛的应用领域ABB机器人被广泛应用于焊接、装配、搬运、喷涂等领域,提高生产效率和产品质量。
不断创新和发展ABB致力于机器人技术的不断创新和发展,推动工业4.0和智能制造的进步。

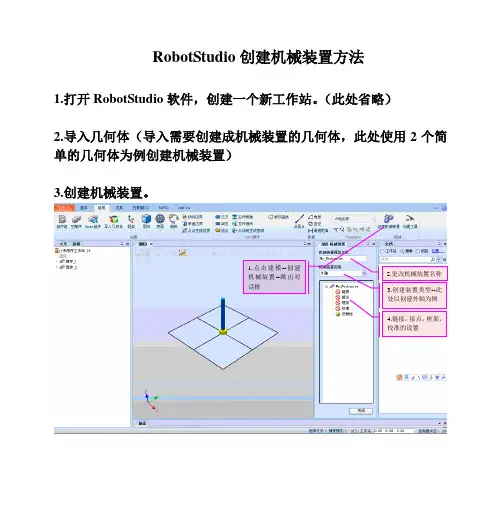
RobotStudio创建机械装置方法1.打开RobotStudio软件,创建一个新工作站。
(此处省略)2.导入几何体(导入需要创建成机械装置的几何体,此处使用2个简单的几何体为例创建机械装置)3.创建机械装置。
1.点击建模--创建机械装置--跳出对话框2.更改机械装置名称3.创建装置类型--此处以创建外轴为例4.链接,接点,框架,校准的设置1.双击链接--跳出对话框2.链接名称3.选择部件4.点击按钮添加部件5:勾选基链接(把其中一固定部件作为基链接)5.按照上一步把其他部件都添加到链接里去。
(此处省略)7.框架和校准的设置(同样点击框架和校准,跳出对话框)8.编译机械装置。
1.点击接点--跳出对话框2.关节名称3.选择关节类型4.选择子链接5.设置关节轴的运动的方向6.可以通过操纵轴来设定关节限值7.设定限制类型1.框架名称2.属于链接3.框架位置4.或直接选择做好的框架5.选择是否设置为基框架1.选择校准的关节。
2.校准位置坐标及方向注:A :若一个机械装置上有多个运动关节,则添加相应的关节(注意父链接和子链接要选择对)。
B :关节轴第一个位置:选中旋转轴心的点,第二格位置同样选中旋转轴心的点(注意看轴方向往哪个坐标,即把那个坐标值改小或改大)。
1.点击下拉按钮--选择浮动2.浮动后下拉框架--出现编译机械装置3.点击编译机械装置4.点击添加姿态按钮--跳出创建姿态对话框。
(按要求可添加多个姿态)5.姿态名称6.关节值(可通过滑块调节各个姿态的位置)9.点击关闭,跳出对话框,点击“是”10.保存为库文件,以便调用----完成。
(完整版)2.ABB机器人RobotStudio创建机械装置方法RobotStudio创建机械装置方法1.打开RobotStudio软件,创建一个新工作站。
(此处省略)2.导入几何体(导入需要创建成机械装置的几何体,此处使用2个简单的几何体为例创建机械装置)3.创建机械装置。
1.点击建模--创建机械装置--跳出对话框2.更改机械装置名称3.创建装置类型--此处以创建外轴为例4.链接,接点,框架,校准的设置1.双击链接--跳出对话框2.链接名称3.选择部件4.点击按钮添加部件5:勾选基链接(把其中一固定部件作为基链接)5.按照上一步把其他部件都添加到链接里去。
(此处省略)7.框架和校准的设置(同样点击框架和校准,跳出对话框)8.编译机械装置。
1.点击接点--跳出对话框2.关节名称3.选择关节类型4.选择子链接5.设置关节轴的运动的方向6.可以通过操纵轴来设定关节限值7.设定限制类型1.框架名称2.属于链接3.框架位置4.或直接选择做好的框架5.选择是否设置为基框架1.选择校准的关节。
2.校准位置坐标及方向注:A :若一个机械装置上有多个运动关节,则添加相应的关节(注意父链接和子链接要选择对)。
B :关节轴第一个位置:选中旋转轴心的点,第二格位置同样选中旋转轴心的点(注意看轴方向往哪个坐标,即把那个坐标值改小或改大)。
1.点击下拉按钮--选择浮动2.浮动后下拉框架--出现编译机械装置3.点击编译机械装置4.点击添加姿态按钮--跳出创建姿态对话框。
(按要求可添加多个姿态)5.姿态名称6.关节值(可通过滑块调节各个姿态的位置)9.点击关闭,跳出对话框,点击“是”10.保存为库文件,以便调用----完成。