天线线列阵方向图
- 格式:docx
- 大小:227.70 KB
- 文档页数:7
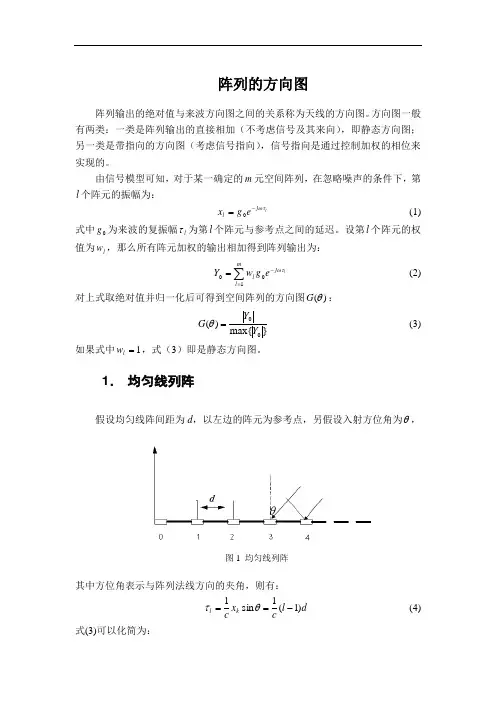
阵列的方向图阵列输出的绝对值与来波方向图之间的关系称为天线的方向图。
方向图一般有两类:一类是阵列输出的直接相加(不考虑信号及其来向),即静态方向图;另一类是带指向的方向图(考虑信号指向),信号指向是通过控制加权的相位来实现的。
由信号模型可知,对于某一确定的m 元空间阵列,在忽略噪声的条件下,第l 个阵元的振幅为:l j l e g x ωτ-=0 (1)式中0g 为来波的复振幅l τ为第l 个阵元与参考点之间的延迟。
设第l 个阵元的权值为l w ,那么所有阵元加权的输出相加得到阵列输出为:∑=-=ml j l l e g w Y 100ωτ (2)对上式取绝对值并归一化后可得到空间阵列的方向图)(θG :}max{)(00Y Y G =θ (3)如果式中1=l w ,式(3)即是静态方向图。
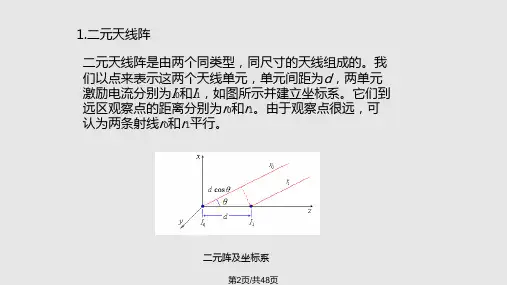
1. 均匀线列阵假设均匀线阵间距为d ,以左边的阵元为参考点,另假设入射方位角为θ,图1 均匀线列阵其中方位角表示与阵列法线方向的夹角,则有:d l cx c k l )1(1sin 1-==θτ (4)式(3)可以化简为:∑=--=ml l j l e g w Y 1)1(00β (5)式中λθπβ/sin 2=,当1=l w 时又可以进一步化简为:)2/sin()2/sin(2/)(00βββm m e mg Y l m j -= (6)可得均匀线阵静态方向图图:)2/sin()2/sin()(0ββθm m G =(7)当d l j l e w β)1(-=,λθπβdd d sin 2=的式(6)可以简化为:)2/)sin(()2/)(sin(2/)(00d d l m j m m e mg Y βββββ--=- (8)于是可得指向为d θ的阵列指向图:)2/)sin(()2/)(sin()(0d d m m G ββββθ--=(9)MATLAB 仿真图方位角/度G (θ)/d B2700阵元M=8,thetad=0,均匀线阵方向图图2 指向0°时,均匀线列阵的方向图方位角/度G (θ)/d B2700阵元M=8,thetad=30,均匀线阵方向图图3 指向30°时,均匀线列阵的方向图2. 均匀平面阵假设有一个n m ⨯的均匀面阵,其几何关系如图(3),以阵列左上角的阵元为参考点,x 轴上有n 个间距为d 的阵元,y 轴上有m 个间距为d 的阵元。
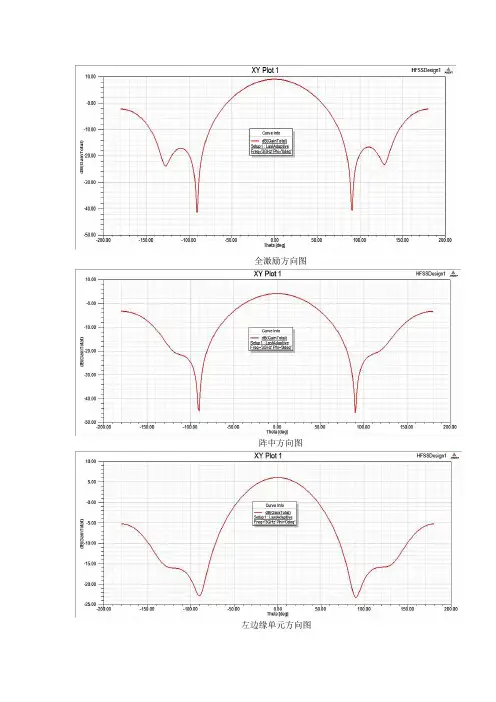
全激励方向图阵中方向图左边缘单元方向图左临边单元方向图右临边单元方向图右边缘单元方向图阵中(5号单元)方向图边缘单元(1号单元)方向图边缘单元(2号单元)方向图边缘单元(3号单元)方向图边缘单元(4号单元)方向图边缘单元(6号单元)方向图边缘单元(7号单元)方向图边缘单元(8号单元)方向图边缘单元(9号单元)方向图全激励方向图阵中方向图Unit 1(1) a flash in the pan昙花一现的人物,一时的成功★The low inflation rate will be no flash in the pan.(2) a matter of 关于...的问题;大约★To be promoted or to fall behind is not a matter of salary but even more a matter of self-respect. ★John cost a matter of 500 yuan for the coat.(3) a number of 一系列,一连串;大部分★When American’s National Research Council sent two engineers to supervise a series of industrial experiments at a large telephone-parts factory called the Hawthorne Plant near Chicago in 1924, it hoped they would learn how shop-floor lighting affected workers’ productivity.★A majority of immigrants spoke English well or very well after ten years of residence.(4)a majority of 种种,各种★A variety of small clubs can provide multiple opportunities for leadership, as well as for practice in successful group dynamics.(5) abide by 恪守,遵守,服从★Californians and New Englanders speak the same language and abide by the same federal laws.(6)above all 首要,尤其★Among the many shaping factors, I would single out the country’s excellent elementary schools; and above all the American genius。

天线方向图(AntennaPattern)天线方向图,是指在离天线一定距离处,辐射场的相对场强(归一化模值)随方向变化的图形,通常采用通过天线最大辐射方向上的两个相互垂直的平面方向图来表示。
天线方向图是衡量天线性能的重要图形,可以从天线方向图中观察到天线的各项参数。
天线方向图分类1.在地面架设的线天线一般采用两个相互垂直的平面来表示其方向图。
即:水平面方向图和铅垂面方向图。
2.超高频天线通常采用与场矢量相平行的两个平面来表示,即E平面方向图,H平面方向图。
3.按照坐标的选择可分为:直角坐标方向图,极坐标方向图,立体方向图等。
天线的特性参数主要包括:主瓣宽度,旁瓣电平,前后比,方向系数等1.主瓣宽度:是衡量天线的最大辐射区域的尖锐程度的物理量。
通常取天线方向图主瓣两个半功率点之间的宽度。
2.旁瓣电平:是指离主瓣最近且电平最高的第一旁瓣的电平,一般以分贝表示。
3.前后比:是指最大辐射方向(前向)电平与其相反方向(后向)电平之比,通常以分贝为单位。
4.方向系数:在离天线某一距离处,天线在最大辐射方向上的辐射功率流密度与相同辐射功率的理想无方向性天线在同一距离处的辐射功率流密度之比。
天线增益指在输入功率相等的条件下,实际天线与理想的辐射单元在空间同一点处所产生的信号的功率密度之比。
它定量地描述一个天线把输入功率集中辐射的程度。
增益显然与天线方向图有密切的关系,方向图主瓣越窄,副瓣越小,增益越高。
增益的物理含义为了在一定的距离上的某点处产生一定大小的信号,如果用理想的无方向性点源作为发射天线,需要100W 的输入功率,而用增益为G = 13 dB = 20 的某定向天线作为发射天线时,输入功率只需 100 /20 = 5W 。
换言之,某天线的增益,就其最大辐射方向上的辐射效果来说,与无方向性的理想点源相比,把输入功率放大的倍数。
不同用途的天线要求其有不同的方向性,阵列天线以其较强的方向性和较高的增益在工程实际中被广泛应用。
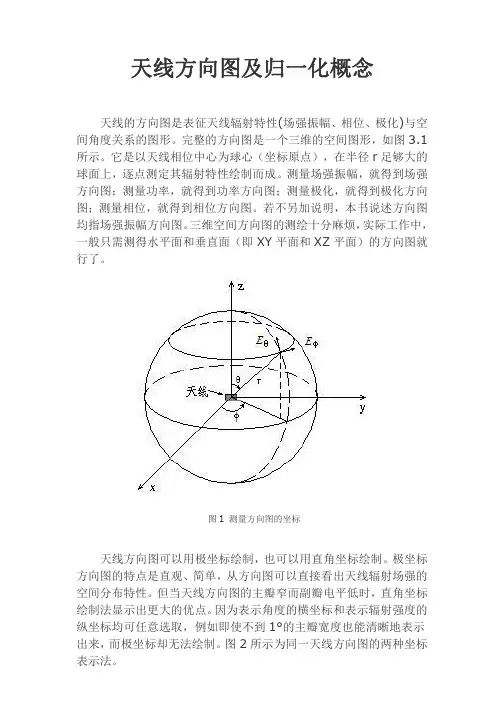
天线方向图及归一化概念天线的方向图是表征天线辐射特性(场强振幅、相位、极化)与空间角度关系的图形。
完整的方向图是一个三维的空间图形,如图3.1所示。
它是以天线相位中心为球心(坐标原点),在半径r足够大的球面上,逐点测定其辐射特性绘制而成。
测量场强振幅,就得到场强方向图;测量功率,就得到功率方向图;测量极化,就得到极化方向图;测量相位,就得到相位方向图。
若不另加说明,本书说述方向图均指场强振幅方向图。
三维空间方向图的测绘十分麻烦,实际工作中,一般只需测得水平面和垂直面(即XY平面和XZ平面)的方向图就行了。
图1 测量方向图的坐标天线方向图可以用极坐标绘制,也可以用直角坐标绘制。
极坐标方向图的特点是直观、简单,从方向图可以直接看出天线辐射场强的空间分布特性。
但当天线方向图的主瓣窄而副瓣电平低时,直角坐标绘制法显示出更大的优点。
因为表示角度的横坐标和表示辐射强度的纵坐标均可任意选取,例如即使不到1°的主瓣宽度也能清晰地表示出来,而极坐标却无法绘制。
图2所示为同一天线方向图的两种坐标表示法。
图2方向图的表示法(a)极坐标(b)直角坐标一般绘制方向图时都是经过归一化的,即径向长度(极坐标)或纵坐标值(直角坐标)是以相对场强E(θ,φ)/Emax,这里E(θ,φ)是任一方向的场强值,Emax是最大辐射方向的场强值。
因此,归一化最大值是1。
对于极低副瓣电平天线的方向图,大多采用分贝值表示,归一化最大值取为零分贝。
图3所示为直角坐标中用归一化场强和分贝值表示的同一天线方向图。
图3 归一化方向图以下为实测的方向图(采用直角坐标系并归一化,单位为dB )DEG1-1发垂直极化方位±8°方向图-1.5-1.2-0.9-0.6-0.30.00.30.60.91.21.5d BDEG1-7发垂直极化方位±3°测交叉极化方向图。

什么是天线方向图?ASPENCORE 旗下媒体天线方向图又叫辐射方向图(radiation pattern)、远场方向图(far-field pattern)。
从方向图上面不能得到天线增益,由方向图得到的是方向系数。
天线增益=方向系数 * 天线效率。
所以方向系数大于增益是肯定的。
天线增益主要是通过方向图的测试而表现出来。
这里有很多的种测试方向图的测试系统。
也就是暗室。
而在暗室的测试出来的结果,也只是一种和理想对称振子比较的的结果。
都知道理想对称振子的增益为2.15dB。
这样就可以根据测试电平的高低来计算出天线的增益。
G=D*N%.而天线的效率一般情况下是没有百分百的,所以G天线增益:天线增益是指:在输入功率相等的条件下,实际天线与理想的辐射单元在空间同一点处所产生的信号的功率密度之比。
它定量地描述一个天线把输入功率集中辐射的程度。
增益显然与天线方向图有密切的关系,方向图主瓣越窄,副瓣越小,增益越高。
天线增益是用来衡量天线朝一个特定方向收发信号的能力,它是选择基站天线最重要的参数之一。
一般来说,增益的提高主要依靠减小垂直面向辐射的波瓣宽度,而在水平面上保持全向的辐射性能。
天线增益对移动通信系统的运行质量极为重要,因为它决定蜂窝边缘的信号电平。
增加增益就可以在一确定方向上增大网络的覆盖范围,或者在确定范围内增大增益余量。
任何蜂窝系统都是一个双向过程,增加天线的增益能同时减少双向系统增益预算余量。
另外,表示天线增益的参数有dBd和dBi。
DBi是相对于点源天线的增益,在各方向的辐射是均匀的;dBd相对于对称阵子天线的增益dBi=dBd+2.15。
相同的条件下,增益越高,电波传播的距离越远。
一般地,GSM定向基站的天线增益为18dBi,全向的为11dBi。
天线方向图的特征参数:为了方便对各种天线的方向图特性进行比较,就需要规定一些特性参数。
主要包括:主瓣宽度,旁瓣电平,前后比,方向系数等。
1、主瓣宽度:是衡量天线的最大辐射区域的尖锐程度的物理量。
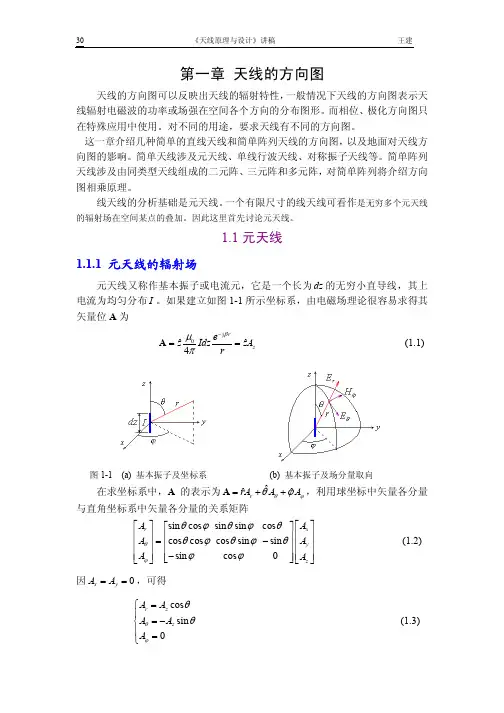
阵列方向图及MATLAB 仿真1、线阵的方向图2()22cos(cos )R φψπφ=+-MATLAB 程序如下(2元):clear;a=0:0.1:2*pi;y=sqrt(2+2*cos(pi-pi*cos(a)));polar(a,y); 图形如下:若阵元间距为半波长的M 个阵元的输出用方向向量权重11(,,)M j j M g eg e φφ⋅⋅⋅加以组合的话,阵列的方向图为 [(1)cos()]1()m Mj m m m R g e ψπφφ--==∑MATLAB 程序如下(10个阵元):clear;f=3e10;lamda=(3e8)/f;beta=2.*pi/lamda;n=10;t=0:0.01:2*pi;d=lamda/4;W=beta.*d.*cos(t);z1=((n/2).*W)-n/2*beta* d;z2=((1/2).*W)-1/2*beta* d;F1=sin(z1)./(n.*sin(z2));iK1=abs(F1) ;polar(t,K1);方向图如下:2、圆阵方向图程序如下:clc;clear all;close all;M = 16; % 行阵元数k = 0.8090; % k = r/lambdaDOA_theta = 90; % 方位角DOA_fi = 0; % 俯仰角% 形成方位角为theta,俯仰角位fi的波束的权值m = [0 : M-1];w = exp(-j*2*pi*k*cos(2*pi*m'/M-DOA_theta*pi/180)*cos(DOA_fi*pi/180));% w = exp(-j*2*pi*k*(cos(2*pi*m'/M)*cos(DOA_theta*pi/180)*cos(DOA_fi*pi/180)+sin(2*pi*m'/M)*si n(DOA_fi*pi/180))); % 竖直放置% w = chebwin(M, 20) .* w; % 行加切比雪夫权% 绘制水平面放置的均匀圆阵的方向图theta = linspace(0,180,360);fi = linspace(0,90,180);for i_theta = 1 : length(theta)for i_fi = 1 : length(fi)a = exp(-j*2*pi*k*cos(2*pi*m'/M-theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180));%a=exp(-j*2*pi*k*(cos(2*pi*m'/M)*cos(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)+sin(2*pi*m'/ M)*sin(fi(i_fi)*pi/180))); % 竖直放置Y(i_theta,i_fi) = w'*a;endendY= abs(Y); Y = Y/max(max(Y));Y = 20*log10(Y);% Y = (Y+20) .* ((Y+20)>0) - 20; % 切图Z = Y + 20;Z = Z .* (Z > 0);Y = Z - 20;figure; mesh(fi, theta, Y); view([66, 33]);title('水平放置时的均匀圆阵方向图');% title('竖面放置时的均匀圆阵方向图'); % 竖直放置axis([0 90 0 180 -20 0]);xlabel('俯仰角/(\circ)'); ylabel('方位角/(\circ)'); zlabel('P/dB');figure; contour(fi, theta, Y);方向图如下:3、平面阵方向图:clc;clear all;close all;Row_N = 16; % 行阵元数Col_N = 16; % 列阵元数k = 0.5; % k = d/lambdaDOA_theta = 90; % 方位角DOA_fi = 0; % 俯仰角% 形成方位角为theta,俯仰角位fi的波束的权值Row_n = [0 : Row_N-1]; Col_n = [0 : Col_N-1];W_Row = exp(-j*2*pi*k*Row_n'*cos(DOA_theta*pi/180)*cos(DOA_fi*pi/180)); W_Col = exp(-j*2*pi*k*Col_n'*sin(DOA_theta*pi/180)*cos(DOA_fi*pi/180)); % W_Col = exp(-j*2*pi*k*Col_n'*sin(DOA_fi*pi/180)); % 竖直放置W_Row = chebwin(Row_N, 20) .* W_Row; % 行加切比雪夫权W_Col = chebwin(Col_N, 30) .* W_Col; % 列加切比雪夫权W = kron(W_Row, W_Col); % 合成的权值N*N x 1% 绘制水平面放置的平面阵的方向图theta = linspace(0,180,180);fi = linspace(0,90,90);for i_theta = 1 : length(theta)for i_fi = 1 : length(fi)row_temp = exp(-j*2*pi*k*Row_n'*cos(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)); % 行导向矢量N x 1col_temp = exp(-j*2*pi*k*Col_n'*sin(theta(i_theta)*pi/180)*cos(fi(i_fi)*pi/180)); % 列导向矢量N x 1% col_temp = exp(-j*2*pi*k*Col_n'*sin(fi(i_fi)*pi/180)); % 竖直放置Y(i_theta,i_fi) = W'*kron(row_temp, col_temp); % 合成的导向矢量N*N x 1 endendY= abs(Y); Y = Y/max(max(Y));Y = 20*log10(Y);Y = (Y+60) .* ((Y+60)>0) - 60; % 切图% Z = Y + 60;% Z = Z .* (Z > 0);% Y = Z - 60;figure; mesh(fi, theta, Y); view([66, 33]);title('水平面放置时的面阵方向图');axis([0 90 0 180 -60 0]);xlabel('俯仰角/(\circ)'); ylabel('方位角(\circ)'); zlabel('P/dB');figure; contour(fi, theta, Y);方向图如下:4、CAPON方法波束形成MATLAB程序如下(阵元16,信号源3,快拍数1024):clear alli=sqrt(-1);j=i;M=16; %均匀线阵列数目P=3; %信号源数目f0=10;f1=50;f2=100;%信号频率nn=1024; %快拍数angle1=-15;angle2=15;angle3=30;%the signal angleth=[angle1;angle2;angle3]';SN1=10;SN2=10;SN3=10;%信噪比sn=[SN1;SN2;SN3];degrad=pi/180;tt=0:.001:1024;x0=exp(-j*2*pi*f0*tt); %3个信号x0、x1、x2x1=exp(-j*2*pi*f1*tt); %x2=exp(-j*2*pi*f2*tt); %t=1:nn;S=[x0(t);x1(t);x2(t)];nr=randn(M,nn);ni=randn(M,nn);u=nr+j*ni; %复高斯白噪声Ps=S*S'./nn; %信号能量ps=diag(Ps);refp=2*10.^(sn/10);tmp=sqrt(refp./ps);S2=diag(tmp)*S; %加入噪声tmp=-j*pi*sin(th*degrad);tmp2=[0:M-1]';a2=tmp2*tmp;A=exp(a2);X=A*S2+.1*u; %接收到的信号Rxx=X*X'./nn; %相关矩阵invRxx=inv(Rxx);%搜寻信号th2=[-90:90]';tmp=-j*pi*sin(th2'*degrad);tmp2=[0:M-1]';a2=tmp2*tmp;A2=exp(a2);den=A2'*invRxx*A2;doa=1./den;semilogy(th2,doa,'r');title('spectrum'); xlabel('angle'); ylabel('spectrum'); axis([-90 90 1e1 1e5]); grid;。