锅炉水温控制系统的PID调节_张芬
- 格式:pdf
- 大小:94.13 KB
- 文档页数:2

模糊PID控制在锅炉再热蒸汽温度调节系统中的应用研究摘要:针对锅炉再热蒸汽温度在变化过程中存在的极端波动和系统不稳定的问题,本文采用模糊PID控制方法进行再热蒸汽温度调节系统的研究。
首先,对锅炉再热蒸汽温度调节系统进行建模,分析并总结了影响系统稳定性和控制精度的主要因素。
接着,针对这些因素,提出了一种基于模糊PID控制算法的控制策略,并建立了相应的数学模型。
最后,通过实际的仿真实验验证了该控制策略的有效性和实用性,实验结果表明,该方法能够有效地提高系统的稳定性和控制精度。
关键词:锅炉再热蒸汽温度;模糊PID控制;系统稳定性;控制精度1. 导言锅炉在工业生产中被广泛使用,锅炉再热蒸汽温度控制系统对于锅炉运行的效率和保护非常重要。
在实际应用中,锅炉再热蒸汽温度存在着极端波动和系统不稳定的问题,为了提高锅炉运行效率,保护设备,有效地解决这些问题,本文提出了一种基于模糊PID控制算法的锅炉再热蒸汽温度控制方法。
2. 系统建模在锅炉再热蒸汽温度调节系统中,主要的控制因素有:再热水流量、给水流量、主蒸汽流量、再热蒸汽流量、给水温度、主蒸汽压力等。
为了进行控制,需要对这些控制因素进行建模和分析,建立数学模型,对系统的稳定性和控制精度进行预测和评估。
3. 控制策略本文采用模糊PID控制算法对锅炉再热蒸汽温度调节系统进行控制。
首先,需要将系统的输入和输出变量建立映射关系,建立模糊控制的基本框架;然后,根据系统的实际情况设置相应的模糊规则库,确定模糊控制的输入和输出;最后,根据模糊控制的输入和输出,计算相应的模糊PID控制参数。
4. 数学模型建立针对控制策略,对系统进行数学建模,将模糊PID控制算法应用于系统中,建立稳定性分析模型和控制精度分析模型。
通过数学模型的分析,可以优化控制参数,提高系统的稳定性和控制精度。
5. 仿真实验结果分析通过MATLAB仿真实验,分析了本文提出的基于模糊PID控制算法的锅炉再热蒸汽温度调节系统的效果。
热水锅炉温度控制的模糊PID参数自整定方法热水锅炉温度控制的模糊PID参数自整定方法热水锅炉温度控制的模糊PID参数自整定方法张秀滢刘强(中煤邯郸设计工程有限责任公司)摘要:针对热水锅炉温度控制中PlD参数人工整定的困难和参数自整定的必要性,对Fuzzy―PID参数自整定原理和方法进行了讨论,并对燃煤热水锅炉供暖系统进行了试运行,表明其正确、有效和实用性。
关键词:锅炉温度控制模糊PID参数自整定k.为.K『厂一模糊比例、积分、微分系数比例系数K,=K;+胆,E吼(2)积分系数K,=K,+胆,Eqi(3)微分系数K庐K升陋,Ead(4)0引言PID算法由于其结构简单、鲁棒性好和可靠性高的特点,成为迄今为止应用最广泛的控制算法。
然而在热水锅炉的温度控制中,由于被控对象具有非线性、时变、大滞后等特点,且热水锅炉温度控制受环境温度和燃料等诸多因素影响,导致难以建立精确的数学模型,难以确定最佳的控制器参数。
此时,传统的PID控制对进一步提高控制对象的质量遇到了极大的困难,难以获得良好的效果。
为了克服常规PID调节器的不足,提高其性能,人们进行了进一步的研究。
模糊控制是智能控制理论的一个分支,近十年来正以它全新的控制方式在控制界受到了极大的重视并得到了迅速发展。
与传统的PID控制方式相比,它具有特别适合于那些难以建立精确数学模型、非线性和大滞后的过程等特点。
但是经过深入研究,也会发现基本模糊控制存在着其控制品质粗糙和精度不高等弊病。
因此,本文提出一种将模糊控制和PID控制相结合起来,通过模糊控制实现PID参数自整定的方法来调节锅炉出水温度。
这种Fuzzy―PID策略,模糊控制的采用不是代替PID控制,而是对传统控制方式的改进和扩展,它既保持了常规PID控制系统结构简单、使用方便、鲁棒性强、控制精度高的优点,又采用模糊推理的方法实现了PID参数Kp、Ki、Kd的在线自整定,兼具了模糊控制灵活性、适应性强的特点,相比单纯的任一种控制效果都要好。

过程参数检测及仪表课程设计(论文)报告锅炉夹套水温PID控制1、系统实验装置1.1 系统设计本实验装置对象主要由水箱、锅炉和盘管三大部分组成。
供水系统有两路:一路由三相(380V恒压供水)磁力驱动泵、电动调节阀、涡轮流量计及自动电磁阀组成;另一路由变频器、三相磁力驱动泵(220V变频调速)、涡轮流量计及自动电磁阀组成。
1.2 被控对象由不锈钢储水箱、(上、中、下)三个串接有机玻璃水箱、4.5KW三相电加热模拟锅炉(由不锈钢锅炉内胆加温筒和封闭式锅炉夹套构成)、盘管和敷塑不锈钢管道等组成。
1.水箱:包括上水箱、中水箱、下水箱和储水箱。
上、中、下水箱采用淡蓝色优质有机玻璃,不但坚实耐用,而且透明度高,便于学生直接观察液位的变化和记录结果。
上、中水箱尺寸均为:D=25cm,H=20cm;下水箱尺寸为:D=35cm,H=20cm。
水箱结构独特,由三个槽组成,分别为缓冲槽、工作槽和出水槽,进水时水管的水先流入缓冲槽,出水时工作槽的水经过带燕尾槽的隔板流入出水槽,这样经过缓冲和线性化的处理,工作槽的液位较为稳定,便于观察。
水箱底部均接有扩散硅压力传感器与变送器,可对水箱的压力和液位进行检测和变送。
上、中、下水箱可以组合成一阶、二阶、三阶单回路液位控制系统和双闭环、三闭环液位串级控制系统。
储水箱由不锈钢板制成,尺寸为:长×宽×高=68cm×52cm×43cm,完全能满足上、中、下水箱的实验供水需要。
储水箱内部有两个椭圆形塑料过滤网罩,以防杂物进入水泵和管道。
2.模拟锅炉:是利用电加热管加热的常压锅炉,包括加热层(锅炉内胆)和冷却层(锅炉夹套),均由不锈钢精制而成,可利用它进行温度实验。
做温度实验时,冷却层的循环水可以使加热层的热量快速散发,使加热层的温度快速下降。
冷却层和加热层都装有温度传感器检测其温度,可完成温度的定值控制、串级控制,前馈-反馈控制,解耦控制等实验。
3.盘管:模拟工业现场的管道输送和滞后环节,长37米(43圈),在盘管上有三个不同的温度检测点,它们的滞后时间常数不同,在实验过程中可根据不同的实验需要选择不同的温度检测点。

实验六、锅炉内胆水温PID整定实验(动态)一、实验目的1)、了解单回路温度控制系统的组成与工作原理。
2)、研究P、PI、PD和PID四种调节器分别对温度系统的控制作用。
3)、改变P、PI、PD和PID的相关参数,观察它们对系统性能的影响。
二、实验设备CS2000型过程控制实验装置, PC机,DCS监控软件,DCS控制系统。
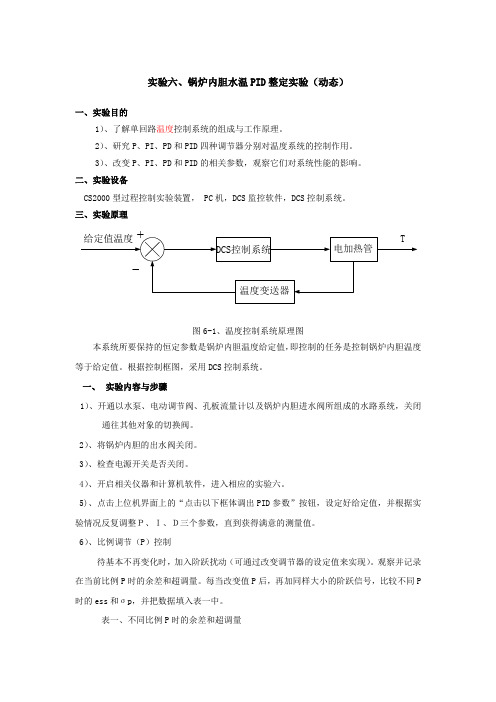
三、实验原理图6-1、温度控制系统原理图本系统所要保持的恒定参数是锅炉内胆温度给定值,即控制的任务是控制锅炉内胆温度等于给定值。
根据控制框图,采用DCS控制系统。
一、实验内容与步骤1)、开通以水泵、电动调节阀、孔板流量计以及锅炉内胆进水阀所组成的水路系统,关闭通往其他对象的切换阀。
2)、将锅炉内胆的出水阀关闭。
3)、检查电源开关是否关闭。
4)、开启相关仪器和计算机软件,进入相应的实验六。
5)、点击上位机界面上的“点击以下框体调出PID参数”按钮,设定好给定值,并根据实验情况反复调整P、I、D三个参数,直到获得满意的测量值。
6)、比例调节(P)控制待基本不再变化时,加入阶跃扰动(可通过改变调节器的设定值来实现)。
观察并记录在当前比例P时的余差和超调量。
每当改变值P后,再加同样大小的阶跃信号,比较不同P 时的ess和σp,并把数据填入表一中。
表一、不同比例P时的余差和超调量记录实验过程各项数据绘成过渡过程曲线。
(数据可在软件上获得)7)比例积分调节(PI)控制(1)、在比例调节器控制实验的基础上,待被调量平稳后,加入积分(I)作用,观察被控制量能否回到原设定值的位置,以验证系统在PI调节器控制下没有余差。
(2)、固定比例P值,然后改变积分时间常数I值,观察加入扰动后被调量的动态曲线,并记录不同I值时的超调量σp。
表二、不同Ti值时的超调量σp(3)、固定I于某一中间值,然后改变比例P的大小,观察加扰动后被调量的动态曲线,并记下相应的超调量σp。
表三、不同δ值时的超调量σp(4)、选择合适的P和I值,使系统瞬态响应曲线为一条令人满意的曲线。
第五节锅炉内胆水温PID 控制实验一、实验目的1.根据实验数据和曲线 ,分析系统在阶跃扰动作用下的动、静态性能。
2.比较不同 PID 参数对系统的性能产生的影响。
3.分析 P、 PI、PD、 PID 四种控制规律对本实验系统的作用。
二、实验设备1.THJ-2 型高级过程控制系统实验装置2.计算机及相关软件3.万用电表一只三、实验原理本实验以锅炉内胆作为被控对象,内胆的水温为系统的被控制量。
本实验要求锅炉内胆的水温稳定至给定量,将铂电阻 TT1 检测到的锅炉内胆温度信号作为反馈信号,在与给定量比较后的差值通过调节器控制三相调压模块的输出电压(即三相电加热管的端电压),以达到控制锅炉内胆水温的目的。
在锅炉内胆水温的定值控制系统中,其参数的整定方法与其它单回路控制系统一样,但由于加热过程容量时延较大,所以其控制过渡时间也较长,系统的调节器可选择 PD 或 PID 控制。
本实验系统结构图和方框图如图 5-1 所示。
估)(bJ图5-1 锅炉内胆温度特性测试系统(a)结构图(b)方框图可以采用两种方案对锅炉内胆的水温进行控制:(一)锅炉夹套不加冷却水(静态)(二)锅炉夹套加冷却水(动态)显然,两种方案的控制效果是不一样的,后者比前者的升温过程稍慢,降温过程稍快。
无论操作者采用静态控制或者动态控制,本实验的上位监控界面操作都是一样的。
四、实验内容与步骤1.先将储水箱贮足水量,将阀门 F1-1、F1-4、F1-5、F1-13全开,打开电磁阀开关,其余阀门关闭,启动380伏交流磁力泵,给锅炉内胆贮存一定的水量(要求至少高于液位指示玻璃管的红线位置),然后关闭阀F1-13、F1-4及电磁阀,打开阀F1-12,为给锅炉夹套供冷水做好准备。
2.接通控制系统电源,打开用作上位监控的的 PC机,进入的实验主界面,在实验主界面中选择本实验项即“锅炉内胆水温 PID控制实验”。
3.合上三相电源空气开关,三相电加热管通电加热,适当增加减少输出量,使锅炉内胆的水温稳定于设定值。
0.引言在过程控制场合,模拟量的PID调节是常见的一种控制方式,在冶金、机械、化工等行业中获得了广泛应用。
这是由于PID调节不需要求出控制系统的数学模型。
同时PID调节器又具有典型的结构,可以根据被控对象的具体情况,采用PID的变种,有较强的灵活性和运用性。
可编程控制器由于具有数值运算的能力和处理模拟信号量的功能,所以可设计出各种PID控制器,运用于具有连续量控制的闭环系统;还可根据被控对象的具体特点和要求来调整必要的控制参数,具有监控功能,并可以在运行中调整参数。
1.系统硬件构成本系统由S7-200PLC、EM235模块、过程控制设备上的锅炉、操作平台上的数显仪表、温度变送器、温度调节器等组成。
温度变送器将采集到的锅炉水温信号(电压信号)传送给PLC模拟量模块EM235输入口,经过PLC内部程序运算,将输出信号由EM235的送给温度调节器,温度调节器根据得到的信号控制锅炉烧水用的三相电阻丝,从而实现对锅炉水温的控制。
系统框架图如图1所示。
图1系统框架图为方便现场操作人员对系统的监视和管理,配置研华工控机一台,它通过PPI总线实现与S7-200PLC总站的通信,并设置上位机监控系统,监控系统可实现锅炉温度画面显示、参数调节、曲线记录及报警等功能。
2.系统工作原理利用过程控制设备上的铂电阻传感器对锅炉水温进行采样,因采样信号为100~138.5Ω之间电阻值,不能直接运用,可利用EM~235模拟量模块产生一个恒流源输入到可变电阻中,从而使采样信号变成相对应的电压值。
将得到的电压值输入到EM~235模拟量模块的输入端,与初始化阶段的设定值一起,进行PID运算得到输出值,将输出值送给温度控制调节器,温度控制调节器根据得到的输出值对锅炉加热电阻丝进行控制,从而实现对锅炉水温的控制。
系统工作示意图如图2所示。
图中,实线方框内为西门子S7-200系列PLC和EM235模拟量模块组成部分,执行机构为温度调控器,被控对象为锅炉水温,敏感元件为温度变送器。
锅炉水位常规PID、神经网络PID 模糊PID控制的仿真分析控制理论与控制工程姓名:学号:10摘要本文首先分析了影响锅炉汽包水位的各种干扰因素,并对汽包的结构及水位的动、静态特性进行分析。
介绍了常规的PID控制方式,由于锅炉汽包水位控制系统的调节器的输入端常加有不确定的输入量,极易引起水位控制产生偏差,所以本文提出了采用BP神经网络PID、模糊PID,来消除锅炉汽包水位偏差。
并用MATLAB对BP神经网络PID、模糊PID、常规PID对锅炉汽包水位控制进行仿真,对比三种控制策略下的仿真曲线,仿真结果表明模糊PID、BP神经网络PID的响应速度快,调整时间少,抗干扰能力和鲁棒性更好,可以保证锅炉汽包水位的稳定。
关键词:汽包水位、PID控制、模糊PID控制、BP神经网络PID控制、MATLABAbstractThis paper first analyzes the influence of boiler liquid level of interference factors, and drum water level dynamic and static characteristics are analyzed. This paper introduces the traditional PID control method, because the boiler drum water level control system often add some uncertain inputs, it easily cause water level control produces deviation. So this paper proposes using BP neural network PID, fuzzy PID, to eliminate the boiler drum water level deviation. With MATLAB on BP neural network PID, fuzzy PID simulation of boiler drum water level. And the conventional PID and fuzzy PID, BP neural network PID method to control the drum liquid level, compared to three control strategy simulation shows that fuzzy emulated images image, PID, BP neural network PID response speed, less response time, anti-jamming and robustness, can guarantee the stability of the boiler liquid level.Keywords: the drum water level, PID control, fuzzy PID control, BP neural network PID control, MATLAB目录1、选题意义 (5)2、常用锅炉汽包水位方案及问题 (5)3、汽包水位控制的研究现状 (6)4、汽包水位系统的组成 (6)4.1汽包的作用 (6)4.2汽包水位系统 (7)5、汽包水位常规PID控制的仿真分析 (7)6、汽包水位神经网络PID控制的仿真分析 (9)7、汽包水位模糊PID控制的仿真分析 (12)8、常规PID、BP神经网络PID、模糊PID对锅炉水位的抗扰动仿真分析 178.1对锅炉汽包水位加阶跃扰动 (17)8.2对锅炉水位加白噪声扰动 (18)9、结论 (20)10、参考文献 (21)11、控制程序附录 (22)1、选题意义锅炉是一种既受压又直接受火的重要设备,是火力发电厂三大主机之一,而且还是轻工业生产过程中的热源和动力源,如为蒸馏、干燥蒸发等提供热能,为风机、泵类提供动力。
第1章绪论1.1课题背景根据国内实际情况和环保问题的考虑和要求,燃烧锅炉由于污染并效率不高,已经逐渐被淘汰;燃油和燃气锅炉也存在着燃料供应不方便和安全性等问题。
因些在人口密集的居民区、旅馆、医院和学校,电加热锅炉完全替代燃煤、燃油、燃气锅炉。
自70年代以来,由于工业过程控制的需要,特别是在微电子技术和计算机技术的迅猛发展以及自动控制理论和设计方法发展的推动下,国内外温度控制系统的发展迅速,并在智能化,自适应、参数整定等方面,以日本、美国、德国、瑞典等国技术领先,都生产出了一批商品化的、性能优异的温度控制器及仪表,并在各行广泛应用。
电加热锅炉采用全新加热方式,它具有许多优点,使其比其他形式的锅炉更具有吸引力:(1)无污染。
不会排放出有害气体、飞尘、灰渣,完全符合环保方面的要求。
(2)能量转化效率高。
加热元件直接与水接触,能量转换效率很高,可达95%以上。
(3)锅炉本体结构简单,安全性好。
不需要布管路,没有燃烧室、烟道,不会出现燃煤、燃油、燃气的泄漏和爆炸危险。
(4)结构简单、体积小、重量轻,占地面积小。
(5)启动、停止速度快,运行负荷调节范围大,调节速度快,操作简单。
由于加热元件工作由外部电气开关控制,所以启停速度快。
(6)可采用计算机监控,完全实现自动化。
其温度的控制都能通过微控制芯片完成,使锅炉的运行完全实现自动化,最大程度地将控制器应用于传统的锅炉行业。
本课题主要研究锅炉温度的过程控制。
新型锅炉是机电一体化的产品,可将电能直接转化成热能,具有效率高,体积小,无污染,运行安全可靠,供热稳定,自动化程度高的优点,是理想的节能环保的供暖设备。
加上目前人们的环保意识的提高,电热锅炉越来越受人们的重视,在工业生产和民用生活用水中应用越来越普及。
电热锅炉目前主要用于供暖和提供生活用水。
主要是控制水的温度,保证恒温供水。
随着计算机和信息技术的高速发展,单片机广泛的应用于工业控制中。
工业控制也越来越多的采用计算机控制,在这里我们采用51系列单片机来做控制器。