自动控制原理简明教程5 (1)
- 格式:ppt
- 大小:6.17 MB
- 文档页数:145
自动控制原理主要内容第一章 自动控制原理导论第二章 自动控制系统的数学模型 第三章 自动控制系统的时域分析第四章 自动控制系统的复数域分析——根轨迹法 第五章 自动控制系统的频率域分析——频率响应法第一章 自动控制原理导论 1.1 自动控制概念在没有人直接参与的情况下,通过控制器使被控对象或过程按照预定的规律运行。
能够实现自动控制任务的系统称为自动控制系统。
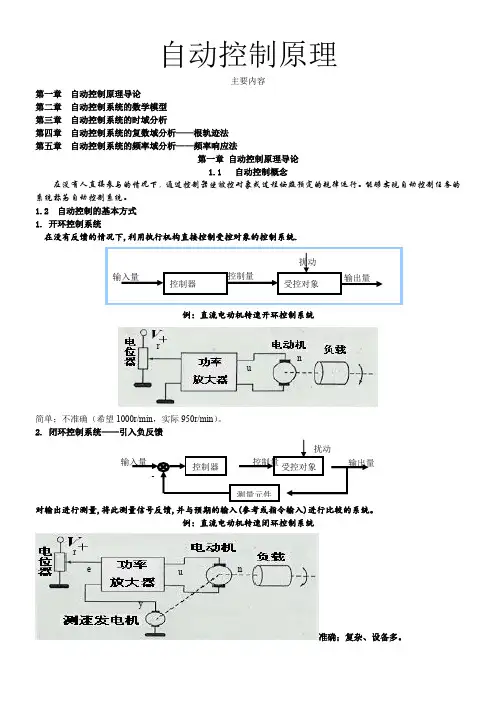
1.2 自动控制的基本方式 1. 开环控制系统在没有反馈的情况下,利用执行机构直接控制受控对象的控制系统.例:直流电动机转速开环控制系统简单;不准确(希望1000r/min ,实际950r/min )。
2. 闭环控制系统——引入负反馈对输出进行测量,将此测量信号反馈,并与预期的输入(参考或指令输入)进行比较的系统。
例:直流电动机转速闭环控制系统准确;复杂、设备多。
renuy控制器受控对象输入量输出量控制量扰动测量元件 -控制器受控对象输入量输出量控制量扰动unr1.3 对控制系统性能的基本要求-----稳定:有一定的稳定裕量。
稳定性是压倒一切的。
对线性系统,有成熟的稳定性分析方法。
对非线性复杂系统,很难,需要高深的数学——是自动控制重要研究内容。
符合要求的动态响应特性。
满足要求的稳态响应(静态精度)。
1.4 自动控制系统的组成 受控系统第二章 自动控制系统的数学模型 2.1 控制系统的输入/输出模型(I/O 模型) 设线性定常系统用系统的输入、输出信号或其变换式所表示的数学模型。
当I/O 为:r(t) c(t) 时域:微分方程 R(s) C(s) 复数域:传递函数 R(j ) C(j ) 频域:频域特性描写线性定常系统的微分方程)()()()(01111t c a t c dt d a t c dt d a t c dt d a n n n n n n ++++--- )()()()( 01111t r b t r dt db t r dt d b t r dt d b m m m m m m ++++=---),,1,0(),,,1,0(m j b n i a j i ==例:试求RLC 串联电路的微分方程。
第五章§5-1 引言§5-2频率特性§5-3 开环系统的典型环节分解和开环频率特性曲线的绘制§5-4开环和闭环系统Bode图的绘制方法§5-5 系统稳定性分析§5-6控制系统的相对稳定性分析第五章 控制系统的频率响应分析[教学目的]:掌握利用频域法进行系统分析的一般方法 ,为后面的校正及信号与系统分析打下基础。
掌握系统频率特性分析与系统幅角之间的关系,掌握Nyquist 图和Bode 图的绘制方法,根据系统的Nyquist 图和Bode 图分析系统的性质。
本章的难点是Nyquist 稳定性分析。
[主要容]:一、引言 二、 频率特性 三、 开环系统的典型环节分解和开环频率特性曲线的绘制 四、 频率域稳定判据 五、 稳定裕度 六、 闭环系统的频域性能指标[重点]: 频率特性的基本概念,各种频域特性曲线的绘制,Nyquist 稳定判据的应用,及相对稳定裕度的分析,理解三频段的概念与作用。
[难点]:时域性能指标与频域性能指标之间的相互转换。
闭环频域性能指标的理解与应用[讲授方法及技巧]:联系传递函数,微分方程等数学模型,将频率法和时域分析法、根轨迹法相比较,理解和掌握古典控制系统的完整体系。
准确理解概念,把握各种图形表示法的相互联系。
与时域法进行对比,以加深理解。
§5-1 引言1.时域分析法(特点)1)以传递函数和单位阶跃响应为分析基础构成的一整套解析法为主响应曲线图形分析法为辅的分析方法。
它具有直观、明确的物理意义,但就是运算工作量较大,参数的全局特征不明显。
2) 原始依据--数学模型,得来不易,也同实际系统得真实情况有差异,存在较多的近似、假设和忽略,有时对于未知对象,还可能要用经验法估计。
3) 对工程中普遍存在的高频噪声干扰的研究无能为力。
4) 在定性分析上存在明显的不足。
5) 属于以“点”为工作方式的分析方法。
2.根轨迹法(特点)1)根轨迹法弥补了时域分析法中参数全局变化时特征不明显的不足,在研究单一指定参数对整个系统的影响时很有用;2)增加零极点(增加补偿器)时,是一种很好的辅助设计工具; 3)以“线”和“面”为工作方式;4)为定性分析提供了一种非常好的想象空间和辅助思维界面。

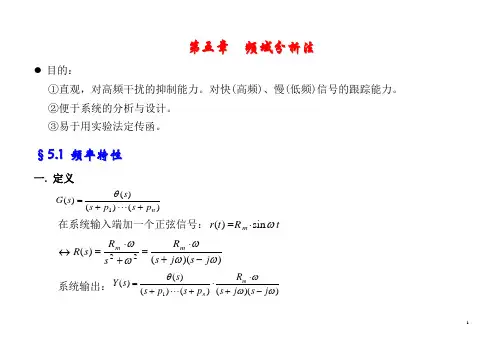
第五章 频域分析法目的:①直观,对高频干扰的抑制能力。
对快(高频)、慢(低频)信号的跟踪能力。
②便于系统的分析与设计。
③易于用实验法定传函。
§5.1 频率特性一. 定义)()()()(1n p s p s s s G +⋅⋅⋅+=θ在系统输入端加一个正弦信号:t R t r m ωsin )(⋅=))(()(22ωωωωωj s j s R s R s R m m -+⋅=+⋅=↔ 系统输出:))(()()()()(1ωωωθj s j s R p s p s s s Y m n-+⋅⋅+⋅⋅⋅+=t j t j e A e A t y t y ωω⋅+⋅+=↔-瞬态响应)()(1若系统稳定,即)(s G 的极点全位于s 左半平面,则 0)(l i m 1=∞→t y t稳态响应为:tj tj ss eA eA t y ωω⋅+⋅=-)(而)(21)()(22ωωωωωj G R jj s s R s G A m j s m -⋅-=+⋅+⋅⋅=-=)(21)()(22ωωωωωj G R jj s s R s G A m j s m ⋅=-⋅+⋅⋅== ∴t j m tj m ss e j G R je j G R j t y ωωωω⋅⋅+⋅-⋅-=-)(21)(21)( =])()([21t j t j m e j G e j G R jωωωω-⋅--⋅⋅ 又)(s G 为s 的有理函数,故)()(*ωωj G j G -=,即φωωj e j G j G )()(= φωωj e j G j G -=-)()(∴][)(21)()()(φωφωω+-+--⋅=t j t j mss e e j G R jt y =)sin()(φωω+⋅⋅t j G R m =)sin(φω+⋅t Y m可见:对稳定的线性定常系统,加入一个正弦信号,其稳态响应也是一个同频率的正弦信号。
其幅值是输入正弦信号幅值的)(ωj G 倍,其相移为)(ωφj G ∠=。
自动控制原理简明教程课后答案【篇一:自控原理习题答案(陈铁牛版)】xt>普通高等教育“十一五”国家级规划教材全国高等专科教育自动化类专业规划教材《自动控制原理》习题答案主编:陈铁牛机械工业出版社第一章习题答案1-11-21-3 闭环控制系统主要由被控对象,给定装置,比较、放大装置,执行装置,测量和变送装置,校正装置等组成。
被控对象:指要进行控制的设备和过程。
给定装置:设定与被控量相对应给定量的装置。
比较、放大装置:对给定量与测量值进行运算,并将偏差量进行放大的装置。
执行装置:直接作用于控制对象的传动装置和调节机构。
测量和变送装置:检测被控量并进行转换用以和给定量比较的装置。
校正装置:用以改善原系统控制性能的装置。
题1-4 答:(图略)题1-5 答:该系统是随动系统。
(图略)题1-6 答:(图略)第二章习题答案题2-1 解:(1)f(s)=12t? sts?11s2) s2?4(2)f(s)=0.5(??s?e8(3)f(s)=2s?4(4)f(s)=ss?12(s?1)?25214?2?3 sss(5)f(s)=题2-2 解:(1) f(t)=1+cost+5sint (2) f(t)=e(cost-4sint)-4t1?t1?10t1?10te?e?te 8181915?t1?4t1?t(4) f(t)= -?e?e?te29183311?t1?4t(5) f(t)= -?t?e?e22318(3) f(t)=(1?题2-3 解:a)r1duc1du?uc?r r2dtr2cdt(1? b)r2ducrdu11?uc?2r?urr1dtr1cr1dtr1cdtdtdtdt2ducd2urduc) r1r2c1c2duc?(r1c1?r1c2?r2c1?uc?r1r2c1c2?(r1c1?r2c1r?ur 22题2-4 解:a) g(s)=t2s(t1=r1c, t2=r2c )(t1?t2)s?1b) g(s)=t2s?1(t1=r1c, t2=r2c )(t1?t2)s?1t1t2s2?(t1?t3)s?1c) g(s)= (t1=r1c1, t2=r1c2, t3=r2c1, t4=r2c2 ) 2t1t2s?(t1?t2?t3)s?1题2-5 解:(图略) 题2-6 解:?(s)?3 s?3题2-7 解:a) ?(s)?1ms2?sf?kb) ?(s)?g1(s)(1?g2(s))1?g2(s)?g1(s)g2(s)(g1(s)?g2(s))g3(s)1?g1(s)g3(s)g1(s)?g2(s))1?g1(s)g3(s)?g2(s)g3(s)c) ?(s)?d) ?(s)?e) g(s)=[g1(s)- g2(s)]g3(s) f) ?(s)?g1(s)g2(s)g3(s)g4(s)1?g1(s)g2(s)?g3(s)g4(s)?g2(s)g3(s)?g1(s)g2(s)g3(s)g4(s)g1(s)g 2(s)g3(s)1?g2(s)?g1(s)g2(s)g3(s)?g1(s)g2(s)g3(s)g4(s)g) ?(s)?题2-8 解:k0?k1c(s)?3r(s)ts?(t?1)s2?s?k0?k1k0?k1c(s)?32n1(s)ts?(t?1)s?s?k0?k1k0?k1?t?sc(s)?3 n2(s)ts?(t?1)s2?s?k0?k1c1(s)g1(s)? r1(s)1?g1(s)g2(s)g3(s)g4(s)c2(s)g2(s)? r2(s)1?g1(s)g2(s)g3(s)g4(s)题2-9 解:c1(s)g1(s)g2(s)g4(s)?r2(s)1?g1(s)g2(s)g3(s)g4(s)c2(s)g4(s)?r1(s)1?g1(s)g2(s)g3(s)g4(s)kkkc(s)?2123 r(s)s?k1k2k3题2-10 解:(1)c(s)k3k4s?k1k2k3?g0(s)?n(s)s2?k1k2k3k4?sk1k2(2) g0(s)??题2-11 解:e?l(s)k1k2?(t2s?1)z2????1(s)(t1?t2)s?1tdtms2?tms?1z12(t1=r1c, t2=r2c, td=la/ra, tm=gdra/375cecm)【篇二:自动控制原理习题及答案.doc】>1-1 根据题1-1图所示的电动机速度控制系统工作原理图(1) 将a,b与c,d用线连接成负反馈状态;(2) 画出系统方框图。
(一)小时候喜欢看杂书,没什么东西看,不正在文化大革命嘛?不过看进去了两个“化”:机械化和自动化。
打小就没有弄明白,这机械化和自动化到底有什么差别,机器不是自己就会动的吗?长大了,总算稍微明白了一点,这机械化是力气活,用机器代替人的体力劳动,但还是要人管着的,不然机器是不知道该干什么不该干什么的;这自动化嘛,就是代替人的重复脑力劳动,是用来管机器的。
也就是说,自动化是管着机械化的,或者说学自动化的是管着学机械的……啊,不对,不对,哪是哪啊!有人考证古代就有自动化的实例,但现代意义上的自动控制开始于瓦特的蒸汽机。
据说纽考门比瓦特先发明蒸汽机,但是蒸汽机的转速控制问题没有解决,弄不好转速飞升,机器损坏不说,还可能说大事故。
瓦特在蒸汽机的转轴上安了一个小棍,棍的一端和放汽阀连着,放气阀松开来就关闭,转速增加;按下去阀就打开,转速降低;棍的另一端是一个小重锤,棍中间某个地方通过支点和转轴连接。
转轴转起来的时候,小棍由于离心力的缘故挥起来。
转速太高了,小棍挥会挥得很高,放汽阀就被按下去打开,转速下降;转速太低了,小棍挥不起来,放汽阀就被松开来关闭,转速回升。
这样,蒸汽机可以自动保持稳定的转速,即保证安全,又方便使用。
也就是因为这个小小的转速调节器,瓦特的名字和工业革命连在一起,而纽考门的名字就要到历史书里去找了。
类似的例子在机械系统里很多,家居必备的抽水马桶是另一个例子。
放水冲刷后,水箱里水位降低,浮子随水面下降,进水阀打开。
随着水位的升高,进水阀逐渐关闭,直到水位达到规定高度,进水阀完全关闭,水箱的水正好准备下一次使用。
这是一个非常简单但非常巧妙的水位控制系统,是一个经典的设计,但不容易用经典的控制理论来分析,不过这是题外话了.这些机械系统设计巧妙,工作可靠,实在是巧夺天工。
但是在实用中,如果每次都需要这样的创造性思维,那太累,最好有一个系统的方法,可以解决“所有”的自动控制问题,这就是控制理论的由来。