自动控制原理简明教程第二版课后答案第五章习题答案
- 格式:pdf
- 大小:721.04 KB
- 文档页数:20

5-1 5()0.251G s s =+5()0.251G j j ωω=+()A ω=()arctan(0.25)ϕωω=-输入 ()5cos(430)5sin(460) =4r t t t ω=-︒=+︒(4)A ==(4)arctan(0.25*4)45ϕ=-=-︒系统的稳态输出为()(4)*5cos[430(4)]3045)17.68cos(475)17.68sin(415)c t A t t t t ϕ=-︒+=-︒-︒=-︒=+︒ sin cos(90)cos(90)cos(270)αααα=︒-=-︒=+︒或者,()(4)*5sin[460(4)]6045) 17.68sin(415)c t A t t t ϕ=+︒+=+︒-︒=+︒所以,对于cos 信号输入下的稳态输出计算规律与sin 信号作用下计算相同。
5-3(2)1()(1)(12)G s s s =++ 1()(1)(12)G j j j ωωω=++()A ω=()arctan arctan 2ϕωωω=--起点:0ω= (0)1;(0)0A ϕ==︒ 位于正实轴上。
终点:ω→∞ ()0;()180A ϕ∞=∞=-︒+∆ 从第三象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()arctan arctan 290ϕωωω=--=-︒ arctan arctan 290ωω+=︒所以有,1/(2)ωω= 21/2ω=()0.473A ω=== 因此,与虚轴的交点为(0,-j0.47)()ω(3)1()(1)(12)G s s s s =++ 1()(1)(12)G j j j j ωωωω=++()A ω=()90arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)90A ϕ=∞=︒∆-- 位于负虚轴(左侧)无穷远方向终点:ω→∞ ()0;()270A ϕ∞=∞=-︒+∆ 从第二象限趋于原点因此,,Nyquist 曲线与实轴有交点,并且满足:()90arctan arctan 2180ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=2()0.673A ω===与实轴的交点为(-0.67,-j0))ω(4)21()(1)(12)G s s s s =++ 21()()(1)(12)G j j j j ωωωω=++()A ω=()180arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)180A ϕ=∞=︒∆-- 位于负实轴(上侧)无穷远方向终点:ω→∞ ()0;()360A ϕ∞=∞=-︒+∆ 从第一象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()180arctan arctan 2270ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=()0.94A ω===与虚轴的交点为(0,j0.94))ω=5-4(2)10.5ω=,21ω=,1K =,0ν=(3)10.5ω=,21ω=,1K =,1ν=低频段直线(延长线)与0db 线交点的频率为:1/cK νω'=。
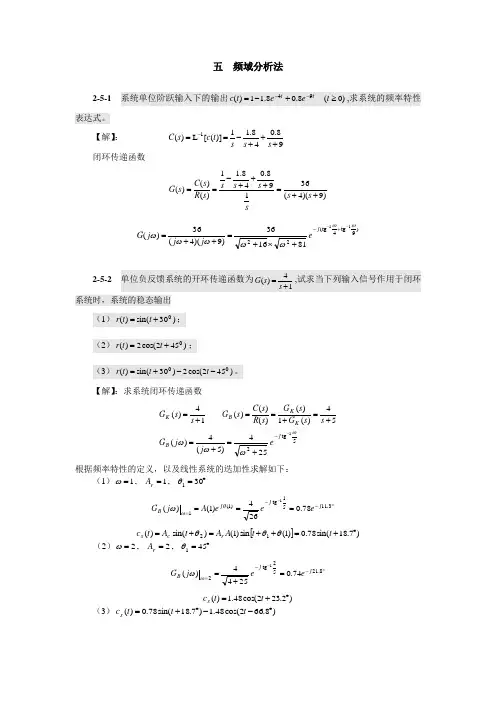
五 频域分析法2-5-1 系统单位阶跃输入下的输出)0(8.08.11)(94≥+-=--t e e t c tt ,求系统的频率特性表达式。
【解】: 98.048.11)]([L )(1+++-==-s s s t c s C 闭环传递函数)9)(4(36198.048.11)()()(++=+++-==s s ss s s s R s C s G )9tg 4(tg 2211811636)9)(4(36)(ωωωωωωω--+-+⨯+=++=j ej j j G2-5-2系统时,系统的稳态输出(1))30sin()(0+=t t r ; (2))452cos(2)(0+=t t r ;(3))452cos(2)30sin()(00--+=t t t r 。
【解】:求系统闭环传递函数5tg 21254)5(4)(54)(1)()()()(14)(ωωωω--+=+=+=+==+=j B K K B K ej j G s s G s G s R s C s G s s G根据频率特性的定义,以及线性系统的迭加性求解如下:(1)︒===30,1,11θωr A︒--====-3.1151tg )1(178.0264)1()(1j j j B e eeA j G θωω[])7.18sin(78.0)1(sin )1()sin()(12︒+=++=+=t t A A t A t c r c s θθθ(2)︒===45,2,21θωr A︒--==+=-8.2152tg 274.02544)(1j j B e ej G ωω)2.232cos(48.1)(︒+=t t c s(3))8.662cos(48.1)7.18sin(78.0)(︒--︒+=t t t c s2-5-3 试求图2-5-3所示网络的频率特性,并绘制其幅相频率特性曲线。
【解】:(1)网络的频率特性1)(111)(212212+++=+++=ωωωωωC R R j C jR C j R R C j R j G(2)绘制频率特性曲线)tg (tg 22212121111)(1)(11)(ωωωωωωωT T j eT T jT jT j G ---++=++= 其中1221221,)(,T T C R R T C R T >+==。
![自动控制原理第五章课后习题答案(免费)[1]](https://uimg.taocdn.com/11139471f46527d3250ce001.webp)
自动控制原理第五章课后习题答案(免费)5-1设单位反馈系统的开环传递函数为对系统进行串联校正,满足开环增益 及 解:① 首先确定开环增益K,00()12lim v s K SG S k →===② 未校正系统开环传函为:012()(1)G s s s =+M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 70.5 dB (at 200 rad/sec) , P m = 16.5 deg (at 3.39 rad/sec)Frequency (rad/sec)③ 绘制未校正系统的开环对数频率特性,得到幅穿频率 3.4c ω=,对应相位角'0()164,16c G j ωγ∠=-∴=,采用超前校正装置,最大相角 0(180())4016630m c G j ϕγωγ=-+∠+=-+=④ 11sin ,31m αϕαα--=∴=+ 0()(1)KG s s s =+40γ=︒112K s -=⑤ 在已绘图上找出10lg 10lg3 4.77α-=-=-的频率 4.4m ω=弧度/秒 令c m ωω=⑥0.128/,0.385/m T s T s ωα=⇒==∴=校正装置的传函为:110.385()110.128Ts s G s Ts s α++==++校正后的开环传函为:012(10.39)()()()(1)(10.13)c s G s G s G s s s s +==++ 校正后1801374340γ=-=>,满足指标要求.-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 99.2 dB (at 1.82e+003 rad/sec) , P m = 42.4 deg (at 4.53 rad/sec)Frequency (rad/sec)5-2设单位反馈系统的开环传递函数为要求 设计串联迟后校正装置。
《自动控制原理》课后习题答案(5章)5.1 系统的结构图如图5-68所示。
试依据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出ss c 和稳态误差ss e 。
⑴()t t r 2sin =⑵()()()︒︒--+=452cos 230sin t t t r图5-1解 系统的传递函数:()()()21+==Φs s R s C s ()()()21++==Φs s s R s E s e 幅频特性及相频特性:()()2,2122ωωωωarctgj j -=Φ+=Φ()()2,21222ωωωωωωarctgarctg j e e -=Φ++=Φ(1)()2,2sin ==ωt t r 稳态输出:()()︒︒-=-+=452sin 221452sin 441t t c ss()︒-≈452sin 354.0t稳态误差:⎪⎭⎫ ⎝⎛-+++=2222sin 2221222arctg arctg t e ss()()︒︒+≈+=43.182sin 791.043.182sin 225t t(2)()()()()()︒︒︒︒+-+=--+=452sin 230sin 452cos 230sin t t t t t r⎪⎪⎭⎫ ⎝⎛+∠+++•-⎪⎪⎭⎫ ⎝⎛+∠+++=︒︒221452sin 221212130sin 211222j t j t c ss ()t t 2sin 225.3sin 55-+=︒ ()t t 2sin 708.05.3sin 447.0-+≈︒⎪⎭⎫ ⎝⎛-++++•-⎪⎭⎫ ⎝⎛-++++=︒︒222452sin 2221221130sin 12112222222arctg arctg t arctg arctg t e ss ()()︒︒︒︒︒︒-++•--++=4543.63452sin 410257.264530sin 510t t ()()︒︒+-+≈43.632sin 582.143.48sin 632.0t t ()()︒︒--+=57.1162sin 582.143.48sin 632.0t t5.2 若系统的单位阶跃响应:()t t e e t h 948.08.11--+-=()0≥t 试求系统的频率特性。
⾃动控制原理课后习题答案第五章第五章5-2 若系统单位阶跃响应为49()1 1.80.8t t h t e e --=-+试确定系统的频率特性。
分析先求出系统传递函数,⽤j ω替换s 即可得到频率特性。
解:从()h t 中可求得:(0)0,(0)0h h '==在零初始条件下,系统输出的拉普拉斯变换()H s 与系统输出的拉普拉斯变换()R s 之间的关系为()()()H s s R s =Φ?即()()()H s s R s Φ= 其中()s Φ为系统的传递函数,⼜1 1.80.836()[()]49(4)(9)H s L h t s s s s s s ==-+=++++1()[()]R s L r t s == 则()36()()(4)(9)H s s R s s s Φ==++ 令s j ω=,则系统的频率特性为()36()()(4)(9)H j j R j j j ωωωωωΦ==++5-7 已知系统开环传递函数为)1s T (s )1s T (K )s (G 12++-=;(K、T1、T2>0)当取ω=1时, o 180)j (G -=ω∠,|G(jω)|=0.5。
当输⼊为单位速度信号时,系统的稳态误差为0.1,试写出系统开环频率特性表达式G(jω)。
分析:根据系统幅频和相频特性的表达式,代⼊已知条件,即可确定相应参数。
解:由题意知:()G j ω= 021()90arctan arctan G j T T ωωω∠=---因为该系统为Ⅰ型系统,且输⼊为单位速度信号时,系统的稳态误差为0.1,即 01()lim ()0.1ss s e E s K →∞===所以:10K = 当1ω=时,(1)0.5G j ==0021(1)90arctan arctan 180G j T T ∠=---=-由上两式可求得1220,0.05T T ==,因此10(0.051)()(201)j G j j j ωωωω-+=+5-14 已知下列系统开环传递函数(参数K 、T 、T2,…,6) (1) )1s T )(1s T )(1s T (K )s (G 321+++=(2))1s T )(1s T (s K )s (G 21++=(3))1Ts (s K )s (G 2+=(4))1s T (s )1s T (K )s (G 221++=(5)3s K)s (G = (6)321s )1s T )(1s T (K )s (G ++=(7))1s T )(1s T )(1s T )(1s T (s )1s T )(1s T (K )s (G 432165++++++= (8)1Ts K)s (G -=(9)1Ts K )s (G +--= (10))1Ts (s K )s (G -= 其系统开环幅相曲线分别如图5-6(1)~(10)所⽰,试根据奈⽒判据判定各系统的闭环稳定性,若系统闭环不稳定,确定其s 右半平⾯的闭环极点数。
《自动控制原理》(第2版)习题答案1第2章2-1 (1)t e t ett23sin 3123cos122--+- (2)6 + 3t(3))334(322+++---t t e e t t (4)t t ωωωsin 1132-2-2 (1)2351853tt e e --+-(2)t e 2-(3)t e a b t ae n t nnn t n n ωωζωωζωζωsin cos --++(4)t a Aa t a A e b a A atωωωωωωωsin cos 222222++++⎪⎭⎫ ⎝⎛++- 2-3 (a ))()()(2110f f ms f s X s X i ++=(b )212110)()()(k k s k k f fsk s X s X i ++=2-4 (a ))()()(t u t kx t xm =+ (b ))()()(2121t u t x k k k k t x m =++ 2-5 (a ))()()()()(2212121t u R dt t du C R R t u R R dt t du CR R r r c c +=++ (b ))()()()()()(22121221t u R t u R R dt t du C R R L dt t u d LC R r c c c =++++ 2-6 252312)14(100)()(2+++=s s s s R s C 2523125231210)()(22++++⋅=s s s s s R s E 2-7 t t e e t c 2241)(--+-= 2-8 )1)(2(23)(+++=s s s s G t t e e t h ---=24)(22-9 (a )1)(1)()(32213+++⋅-=s R R C s CR R R s U s U r c (b )13221)()()(R R R s R CR s U s U r c ++-= 2-10 (a )))((1)()(432121G G G G G G s R s C -+++=(b ))(1)1()()(21221H H G G G s R s C -++=(c )331311321332123113211)()(H G H G H G G G G H G G H G G H G G G G s R s C ++++++=2-11 (a )32211)()(G G G G s R s C ++=(b )H G H H G s R s C 111)1()()(+--=(c )121223121)()()(H G G H G G G G s R s C +++=2-12 (a )))((1)1()()(23111232123111134321H G H G H H G G G H G H G H G G G G G G s R s C --++++++=))((1)1(1)()(2311123212311123423H G H G H H G G G H G H G H H G G H G s R s E --++++-+⋅=(b )21212121312)()(G G G G G G G G s R s C ++-++-= 21212131)1(1)()(G G G G G G s R s E ++-+⋅=2-13 (a )12121211)()(H G G G G G G s R s C ++= 121211211)1(1)()(H G G G G H G G s R s E +++⋅=12121231211)1(1)()(H G G G G G G H G G s D s C ++++⋅-=12121231211)1(1)()(H G G G G G G H G G s D s E ++-+⋅= (b )434242143421)()(G G G G G G G G G G G s R s C ++++= 434242111)()(G G G G G G G s R s E ++-=434241)()(G G G G G s D s C ++= 434241)()(G G G G G s D s E ++-=32-14 (a )))((1)(23113343321231134321H G H G H G G H G G G H G H G G G G G G s G -+++-++=(b )3541432326543211)(H G G H G G H G G G G G G G G s G +-+=(c ) 15.1 (d )))((1)1()(ch af ehgf ch gb af gb ed abcd s G +----++=45σ % = 56.2% t p = 1.006 t s = 63-13 0 < K < 0.75 3-14 (1)0(2)1 3-16 (1)∞ ∞6分离点:d = -0.8857(4) 渐近线:σa = -1 ϕa = ± 60︒,180︒与虚轴的交点:K = 3 s = ± j1.414分离点:d = -0.423 根迹图略(5) 渐近线:σa = -2/3 ϕa = ± 60︒,180︒与虚轴的交点:K = 4 s = ± j1.414(6)渐近线:σa = -1.5 ϕa = ± 45︒,± 135︒起始角:ϕ1 = -63.4︒根迹图略 (7)(8)894-9 零度根轨迹。
第五章习题与解答5-1 试求题5-1图(a)、(b)网络的频率特性。
u rR 1u cR 2CCR 2R 1u ru c(a) (b)题5-1图 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sCR sC R R R s U s U r c ττ ωωτωωωωω11121212121)1()()()(jT j K C R R j R R C R R j R j U j U j G r c a ++=+++==(b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c )(1111)()(2122222212ττ ωωτωωωωω2221211)(11)()()(jT j C R R j C R j j U j U j G r c b ++=+++==5-2 某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s (1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r题5-2图 反馈控制系统结构图解 系统闭环传递函数为: 21)(+=Φs s 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ )]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m ss ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m ss ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-3 若系统单位阶跃响应h t e e t tt()..=-+≥--11808049试求系统频率特性。
第5章频率特性法频域分析法是一种图解分析法,可以根据系统的开环频率特性去判断闭环系统的性能,并能较方便地分析系统参量对系统性能的影响,从而指出改善系统性能的途径,已经发展成为一种实用的工程方法,其主要内容是:1)频率特性是线性定常系统在正弦函数作用下,稳态输出与输入的复数之比对频率的函数关系。
频率特性是传递函数的一种特殊形式,也是频域中的数学模型。
频率特性既可以根据系统的工作原理,应用机理分析法建立起来,也可以由系统的其它数学模型(传递函数、微分方程等)转换得到,或用实验法来确定。
2)在工程分析和设计中,通常把频率特性画成一些曲线。
频率特性图形因其采用的坐标不同而分为幅相特性(Nyquist 图)、对数频率特性(Bode 图)和对数幅相特性(Nichols 图)等形式。
各种形式之间是互通的,每种形式有其特定的适用场合。
开环幅相特性在分析闭环系统的稳定性时比较直观,理论分析时经常采用;波德图可用渐近线近似地绘制,计算简单,绘图容易,在分析典型环节参数变化对系统性能的影响时最方便;由开环频率特性获取闭环频率指标时,则用对数幅相特性最直接。
3)开环对数频率特性曲线(波德图)是控制系统分析和设计的主要工具。
开环对数幅频特性L (ω)低频段的斜率表征了系统的型别(v ),其高度则表征了开环传递系数的大小,因而低频段表征系统稳态性能;L (ω)中频段的斜率、宽度以及幅值穿越频率,表征着系统的动态性能;高频段则表征了系统抗高频干扰的能力。
对于最小相位系统,幅频特性和相频特性之间存在着唯一的对应关系,根据对数幅频特性,可以唯一地确定相应的相频特性和传递函数。
4)奈奎斯特稳定性判据是利用系统的开环幅相频率特性G (j ω)H (j ω)曲线,又称奈氏曲线,是否包围GH 平面中的(-l ,j0)点来判断闭环系统的稳定性。
利用奈奎斯特稳定判据,可根据系统的开环频率特性来判断闭环系统的稳定性,并可定量地反映系统的相对稳定性,即稳定裕度。