自动控制原理简明教程 第四章 根轨迹法 习题答案
- 格式:ppt
- 大小:689.00 KB
- 文档页数:22
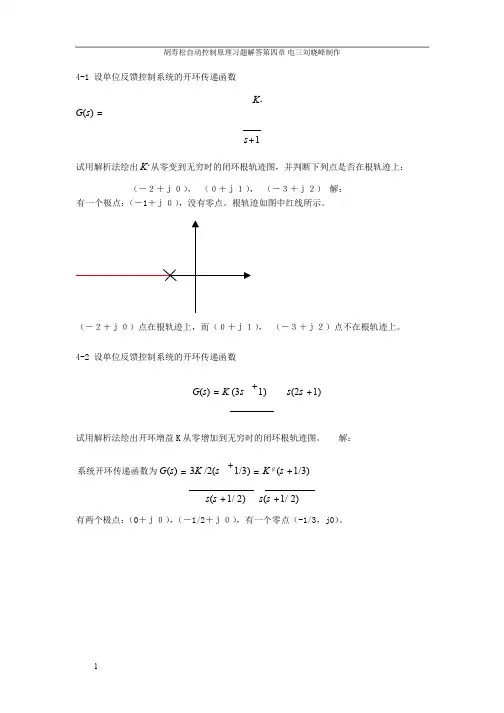
4-2 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*()(1)(3)K G s s s s =++ 2)*(5)()(2)(3)K s G s s s s +=++解:(1)()(1)(3)*K G s s s s =++① 由G (s )知,n =3,m =0,p 1=0,p 2=–1,p 3=–3。
② 实轴上[0,–1]、[–3,∞]是根轨迹段。
③ 有n –m =3条渐近线,交点3403310-=---=a σ, 夹角︒±=60a ϕ、180°。
④ 实轴上[0、–1]根轨迹段上有分离点d 。
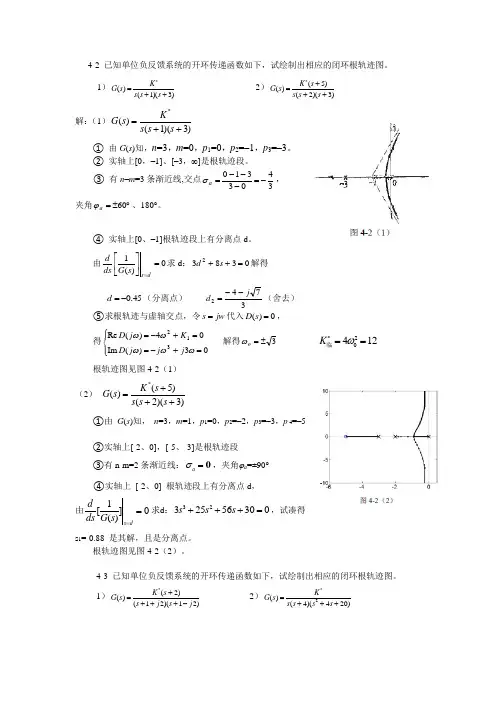
由0)(1=⎥⎦⎤⎢⎣⎡=ds s G ds d 求d :03832=++s d 解得 45.0-=d (分离点) 3742j d --=(舍去) ⑤求根轨迹与虚轴交点,令jw s =代入0)(=s D ,得⎪⎩⎪⎨⎧=+-==+-=03)(Im 04)(Re 312ωωωωωj j j D K j D 解得3±=o ω 20412*K ω==临根轨迹图见图4-2(1)(2) *(5)()(2)(3)K s G s s s s +=++①由 G (s )知, n =3,m =1,p 1=0,p 2=–2,p 3=–3,p 4=–5②实轴上[-2、0],[-5、-3]是根轨迹段 ③有n-m=2条渐近线:0a σ=,夹角ϕa =±90°④实轴上 [-2、0] 根轨迹段上有分离点d , 由1[]0()s dd ds G s ==求d :3232556300s s s +++=,试凑得 s 1=-0.88 是其解,且是分离点。
根轨迹图见图4-2(2)。
4-3 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*(2)()(12)(12)K s G s s j s j +=+++- 2)*2()(4)(420)K G s s s s s =+++解:(1)*(2)()(12)(12)K s G s s j s j +=+++-根轨迹图见图4-3(1)(2)*2()(4)(420)K G s s s s s =+++① n =4,m =0,p 1=0,p 2=–4,p 3、4=–2±j 4② p 1、p 2连线中点正好是p 3、p 4实部,开环极点分布对称于垂线s=–2,根轨迹也将对称于该垂线。
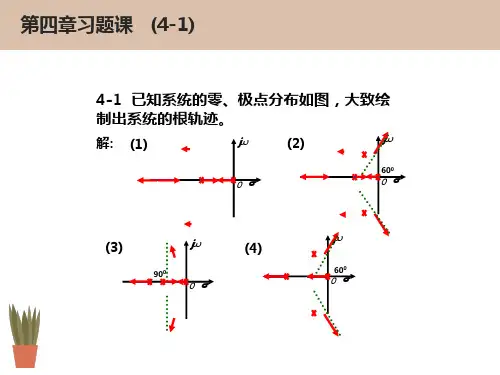
第四章 习题4-1 绘制具有下列开环传递函数的负反馈系统的根轨迹1、()()()()54*++=s s s K s H s G解:首先确定开环传递函数中的零极点的个数各是多少。
由开环传递函数可知 m=0,n=3,n -m=3。
即,有限零点为0个,开环极点为3个。
其中,3个开环极点的坐标分别为:p 1=0,p 2=-4,p 3=-5。
然后,在[s]平面上画出开环极点的分布情况,根据根轨迹方程的幅角条件:首先确定实轴上的闭环系统的根轨迹。
如图所示。
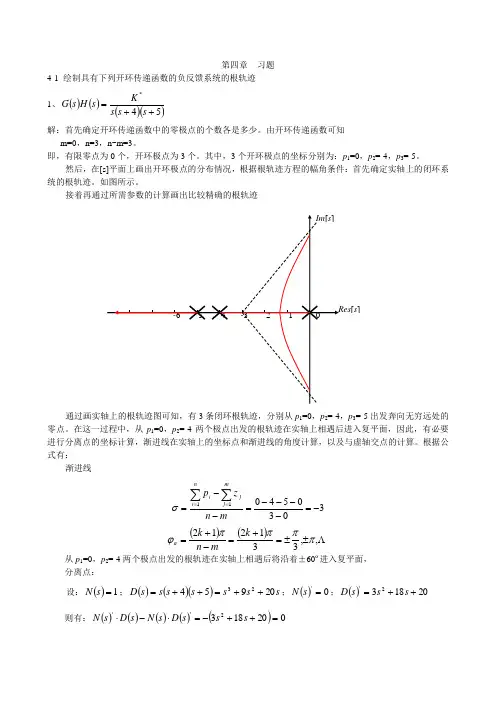
接着再通过所需参数的计算画出比较精确的根轨迹通过画实轴上的根轨迹图可知,有3条闭环根轨迹,分别从p 1=0,p 2=-4,p 3=-5出发奔向无穷远处的零点。
在这一过程中,从p 1=0,p 2=-4两个极点出发的根轨迹在实轴上相遇后进入复平面,因此,有必要进行分离点的坐标计算,渐进线在实轴上的坐标点和渐进线的角度计算,以及与虚轴交点的计算。
根据公式有:渐进线303054011-=----=--=∑∑==mn zp n i mj jiσ()() ,,331212ππππϕ±±=+=-+=k mn k a从p 1=0,p 2=-4两个极点出发的根轨迹在实轴上相遇后将沿着±60º进入复平面,分离点:设:()1=s N ;()()()s s s s s s s D 2095423++=++=;()0'=s N ;()201832'++=s s s D则有:()()()()()0201832''=++-=⋅-⋅s s s D s N s D s N[s ]0201832=++s s解得方程的根为s 1= -4.5275(不合题意舍去);s 2= -1.4725 得分离点坐标:d = -1.4725。
与虚轴的交点:在交点处,s=j ω,同时也是闭环系统的特征根,必然符合闭环特征方程,于是有:()020********=++--=+++*=*K j j K s s sj s ωωωω整理得: 0203=-ωω;092=-*ωK 解得01=ω;203,2±=ω;18092==*ωK 最后,根据以上数据精确地画出根轨迹。

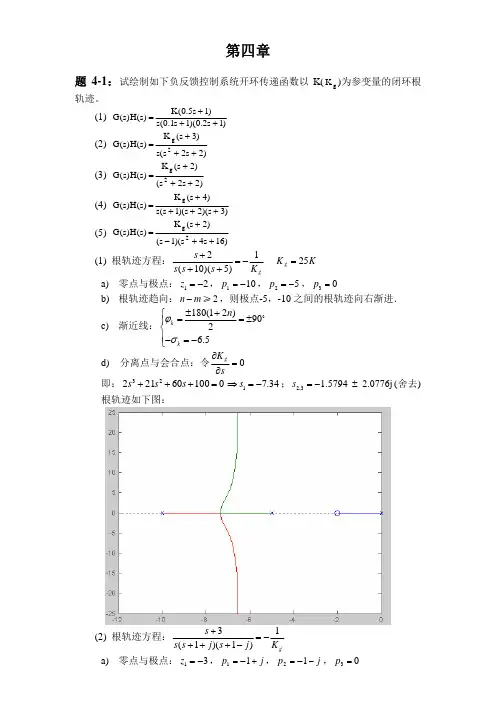
第4章4-1 已知系统的开环传函如下,试绘制系统参数K 从0→∞时系统的根轨迹图,对特殊点要加以简单说明. (1) ()()(4)(1)(2)K s G s H s s s s +=++ (2) ()()2(4)(420)KG s H s s s s s =+++ 解:(1)有3个开环几点,1个开环零点,固有3条根轨迹分别始于0,-1,-2; 1条根轨迹终于-4,另外2条根轨迹趋于无穷远处 实轴上的根轨迹分布在-1~0之间及-4~-2之间 渐近线条数为n-m=3-1=2 渐进线的交点12041312σ++-=-=-渐近线的倾角90θ︒=±分离点22[()()]02152480d G s H s s s s ds =⇒+++= 解得: 12s =- 其它舍去求与虚轴交点:令s j ω=代入特征方程(1)(2)(4)0s s s K s ++++=中得(1)(2)(4)0j j j K j ωωωω++++= 令上式两边实部和虚部分别相等,有226430(2)0 2.83K K K ωωωω⎧=⎧-=⎪⎪⇒⎨⎨+-==±=±⎪⎪⎩⎩绘制系统根轨迹,如图4-1(1)(2)有4个开环几点,无开环零点,有4条根轨迹,分别起始于0,-4, 24j -±终于无穷远处 实轴上的根轨迹分布在-4~0之间; 渐近线条数为n-m=4-0=4 渐进线的交点04242424j j σ++++-=-=-渐近线的倾角45,135θ︒︒=±±分离点22[()()]042472800d G s H s s s s ds=⇒+++=解得: 2s =-由()()1G s H s =得21224(2)4220K=--+--⨯+, K=64绘制系统根轨迹,如图4-1(2)图4-1(1)图4-1(2)4-2 已知系统的开环传函为(2)(3)()()(1)K s s G s H s s s ++=+(1) 试绘制系统参数K 从0→∞时系统的根轨迹图,求取分离点和会和点 (2) 试证明系统的轨迹为圆的一部分解:有2个开环极点,2个开环零点,有2条根轨迹,分别起始于0,-1; 终于-2,-3;实轴上的根轨迹分布在-3~-2之间及-1~0之间分离会和点2221,2,321[()()]02401,12123(2)()()()[()()]0[2(6)4]0203602,18()()[()()]00020,d G s H s s ds KK K s G s H s s s a d G s H s s s a s a dsa a a a s KG s H s sd G s H s s ds a s s =⇒+===-+⨯-++=+=⇒+++=⇒-+≥⇒≤≥===⇒=≤≤=23s ==解得:当10.634s =-时 由()()1G s H s =得(0.6342)(0.6343)10.070.6340.6341K K -+-+=⇒=-⨯-+当2 2.366s =-时 同理 K=13.9 绘制系统根轨迹 如图4-2证明:如果用s j αβ=+代入特征方程1()()0G s H s +=中,并经整理可得到以下方程式:2233()24αβ++=(注:实部虚部相等后消K 可得)显然,这是个圆的方程式,其圆心坐标为3(,0)2-,半径为2图4-24-3 已知系统的开环传函()()(1)(3)KG s H s s s =++(1) 试绘制系统参数K 从0→∞时系统的根轨迹图(2) 为了使系统的阶跃响应呈现衰减振荡形式,试确定K 的范围 解:有2个开环极点,无开环零点,有2条根轨迹,分别起始于-1,-3; 终于无穷远处;实轴上的根轨迹分布-3~-1之间; 渐近线条数2; 渐近线的交点13022σ+-=-=- 渐近线的倾角90θ︒=± 分离会和点[()()]0240d G s H s s ds=⇒+=解:S=-2由()()1G s H s =得1,12123KK ==-+⨯-+绘制系统根轨迹图4-3由图知 当1<K<+∞时系统的响应呈现衰减振荡形式4-4 设负反馈控制系统的开环传函为2(2)()()()K s G s H s s s a +=+试分别确定使系统根轨迹有一个,两个和三个实数分离点的a 值,分别画出图形 解:求分离点2[()()]0[2(6)4]0d G s H s s s a s a ds=⇒+++=解得s=0,或分离点为实数2203602a a a ⇒-+≥⇒≤或18a ≥当a=18时 实数分离点只有s=0 如图4-4(1)当a>18时 实数分离点有三个,分别为1,2,3(6)0,4a s -+=如图4-4(2)当a=2时2()()K G s H s s =分离点[()()]00d G s H s s ds=⇒= 即分离点只有一个s=0 如图4-4(3) 当02a ≤≤分离点有一个s=0 如图4-4(4) 当a<0时 分离点有1230,s s s ===(舍去)如图4-4(5)综上所述:当a=18,0≤a ≤2时,系统有一个分离点 当a >18时,系统有三个实数分离点 当a <0时,系统有两个分离点a=18图4-4(1) a=2图4-4(2)图4-4(3) a=1图4-4(4)图4-4(5)4-65 已知系统的开环传递函数为3(1)(3)()()K S S G S H S S++=(1)绘制系统的根轨迹。
自动控制原理第四章习题解答4-4解(简略解答):渐近线:与实轴交点:35-=σ; 夹角:3)12(πθ+=k ,31πθ=,32πθ-=,πθ=3。
虚轴交点:2j ±=ω,12*≥K 时系统不稳定。
4-5解(简略解答):根据幅角条件,利用三角函数关系可得:()22210=+ωσ。
4-6解(简略解答):(1)渐近线3-=σ,夹角:3)12(πθ+=k ,31πθ=,32πθ-=,πθ=3。
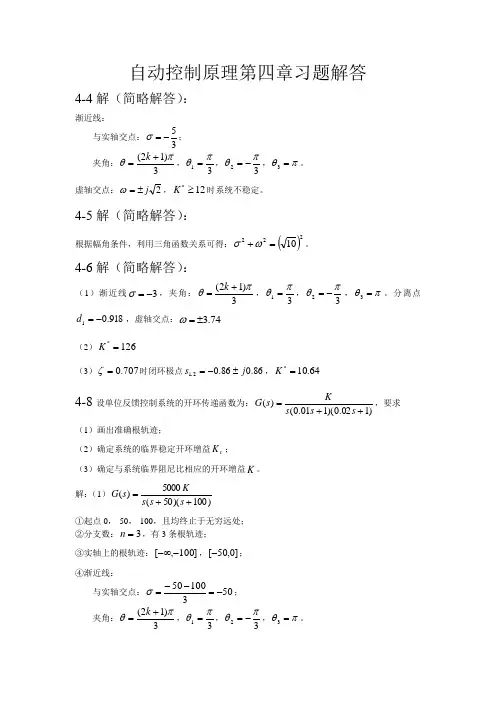
分离点918.01-=d ,虚轴交点:74.3±=ω(2)126*=K(3)707.0=ζ时闭环极点86.086.02,1j s ±-=,64.10*=K4-8设单位反馈控制系统的开环传递函数为:)102.0)(101.0()(++=s s s Ks G ,要求(1)画出准确根轨迹;(2)确定系统的临界稳定开环增益c K ; (3)确定与系统临界阻尼比相应的开环增益K 。
解:(1))100)(50(5000)(++=s s s K s G①起点0,-50,-100,且均终止于无穷远处; ②分支数:3=n ,有3条根轨迹;③实轴上的根轨迹:]100,[--∞,]0,50[-; ④渐近线:与实轴交点:50310050-=--=σ;夹角:3)12(πθ+=k ,31πθ=,32πθ-=,πθ=3。
⑤分离点和会合点:010015011=++++d d d整理得:0500030032=++d d解之得:3.211-=d (在根轨迹上,保留),3.212=d (不在根轨迹上,舍去) 根轨迹如图所示:(2)临界开环增益c K 为根轨迹与虚轴交点对应的开环增益。
050005000150)(23=+++=K s s s s D令ωj s =带入上式可得:0)5000(500015032=+-++-ωωωj K即:⎩⎨⎧=+-=+-050000500015032ωωωK ,解之得:71.7050002,1±=±=ω,0=ω(舍去) (3)系统处于临界阻尼比1=ζ,相应的闭环根位于分离点处,即要求分离点d 对应的K 值。
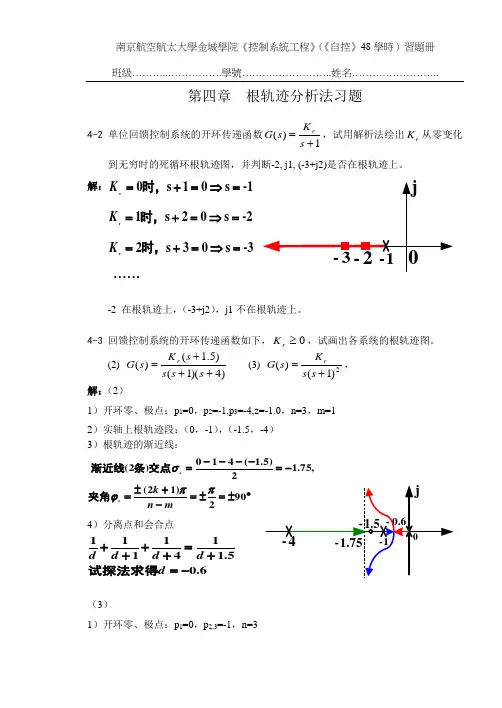
第四章 根轨迹分析法习题4-2 单位回馈控制系统的开环传递函数1)(+=s K s G r,试用解析法绘出r K 从零变化到无穷时的死循环根轨迹图,并判断-2, j1, (-3+j2)是否在根轨迹上。
解:1-s 01s 0r=⇒=+=时,K2-s 02s 1r=⇒=+=时,K3-s 03s 2r=⇒=+=时,K……-2 在根轨迹上,(-3+j2),j1不在根轨迹上。
4-3 回馈控制系统的开环传递函数如下,0≥r K ,试画出各系统的根轨迹图。
(2) )4)(1()5.1()(+++=s s s s K s G r (3) 2)1()(+=s s K s G r ,解:(2)1)开环零、极点:p 1=0,p 2=-1,p 3=-4,z=-1.0,n=3,m=1 2)实轴上根轨迹段:(0,-1),(-1.5,-4) 3)根轨迹的渐近线:︒±=±=-+±=-=----=902)12(,75.12)5.1(410)2( ππϕσm n k aa夹角交点条渐近线4)分离点和会合点6.05.1141111-=+=++++d d d d d 试探法求得(3)1)开环零、极点:p 1=0,p 2,3=-1,n=32)实轴上根轨迹段:(0,-1),(-1,-∞) 3)根轨迹的渐近线:±=-+±=-=--=3)12(,323110)3( ππϕσm n k aa夹角交点条渐近线4)分离点和会合点310121-=⇒=++d d d 5)与虚轴交点:223++s s4-5 系统的开环传递函数为)1()2()(++=s s s K s G r ,(1) 画出系统的根轨迹,标出分离点和会合点;(2) 当增益r K 为何值时,复数特征根的实部为-2?求出此根。
解: (1)1)开环零、极点:p 1=0,p 22)实轴上根轨迹段:(0,-13)分离点和会合点.3,586.02111121-=-=⇒+=++d d d d d123s s s s r2K -r21 1K rKj,202rr±==⇒=-s K K(2)系统特征方程为02)1(rr2=+++K s K s2j 2322122,1rr±-==-=+-=-s K Ka b ,,得:由4-6 单位回馈系统的前向信道函数为)3)(1()(++=s s s K s G r,为使死循环主导极点具有阻尼比5.0=ξ,试确定r K 的值。
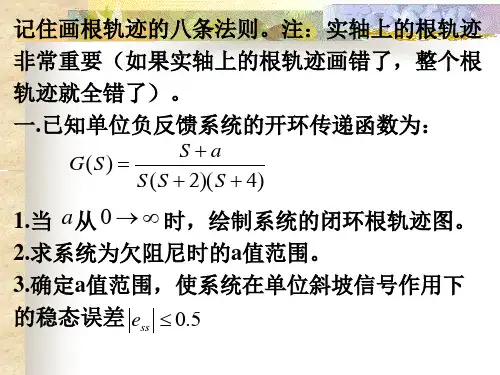
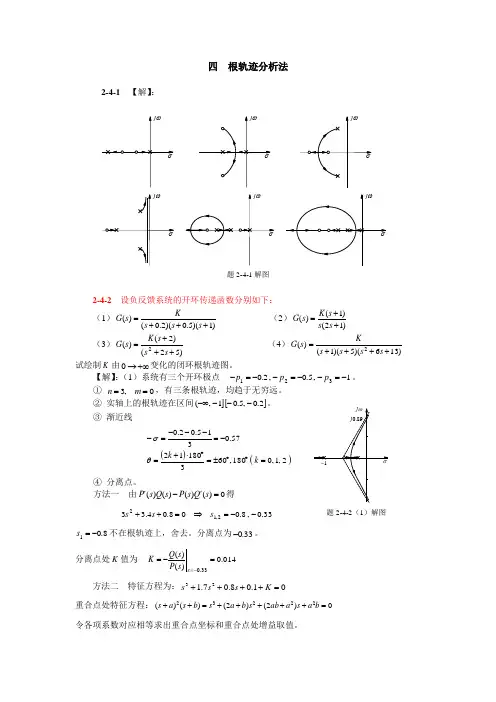
四 根轨迹分析法2-4-1 【解】:题2-4-1解图2-4-2 设负反馈系统的开环传递函数分别如下: (1))1)(5.0)(2.0()(+++=s s s Ks G (2))12()1()(++=s s s K s G(3))52()2()(2+++=s s s K s G (4))136)(5)(1()(2++++=s s s s Ks G试绘制K 由+∞→0变化的闭环根轨迹图。
【解】:(1)系统有三个开环极点 1,5.0,2.0321-=--=--=-p p p 。
① 0,3==m n ,有三条根轨迹,均趋于无穷远。
② 实轴上的根轨迹在区间]][2.0,5.01,(----∞。
③ 渐近线 ()()2,1,0180,6031801257.0315.02.0=︒︒±=︒⋅+=-=---=-k k θσ ④ 分离点。
方法一 由0)()()()(='-'s Q s P s Q s P 得33.0,8.008.04.332,12--=⇒=++s s s8.01-=s 不在根轨迹上,舍去。
分离点为33.0-。
分离点处K 值为 014.0)()(33.0=-=-=s s P s Q K方法二 特征方程为:01.08.07.123=++++K s s s重合点处特征方程:0)2()2()()(22232=+++++=++b a s a ab s b a s b s a s 令各项系数对应相等求出重合点坐标和重合点处增益取值。
题2-4-2(1)解图⑤ 根轨迹与虚轴的交点。
系统的特征方程为01.08.07.1)(23=++++=K s s s s D方法一 令ωj s +,得⎪⎩⎪⎨⎧=±=⇒⎪⎩⎪⎨⎧=++-=+-⇒=+++--26.18.001.07.108.001.08.07.12323K K K j j ωωωωωωω 方法二 将特征方程列劳斯表为Ks K s Ks s ++-+1.07.11.08.01.07.18.010123令1s 行等于0,得26.1=K 。
第四章 根轨迹法习题及答案4-1 系统的开环传递函数为)4s )(2s )(1s (K )s (H )s (G *+++=试证明3j 1s 1+-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件π)12()()(+±=∠k s H s G ,如图所示。
对于31j s +-=,由相角条件=∠)s (H )s (G 11-++-∠-)13j 1(0=++-∠-++-∠)43j 1()23j 1(ππππ-=---632满足相角条件,因此311j s +-=在根轨迹上。
将1s 代入幅值条件:143j 123j 113j 1K s H )s (G *11=++-⋅++-⋅++-=)(解出 : 12K *= , 238K K *==4-2 已知单位反馈系统的开环传递函数如下,试求参数b 从零变化到无穷大时的根轨迹方程,并写出2b =时系统的闭环传递函数。
(1))b s )(4s (02)s (G ++=(2))b s )(2s (s )b 2s (01)s (G +++=解 (1) )4j 2s )(4j 2s ()4s (b 20s 4s )4s (b )s (G 2-++++=+++=' 28s 6s 20)s (G 1)s (G )s (2++=+=Φ(2) )10s 2s (s )20s 2s (b )s (G 22++++='=)3j 1s )(3j 1s (s )19j 1s )(19j 1s (b -+++-+++ 40s 14s 4s )4s (10)s (G 1)s (G )s (23++++=+=Φ 4-3 已知单位反馈系统的开环传递函数)b s )(4s (s2)s (G ++=,试绘制参数b 从零变化到无穷大时的根轨迹,并写出s=-2这一点对应的闭环传递函数。
解 )6s (s )4s (b )s (G ++='根轨迹如图。
点),3(j -不在根轨迹上。
(3)求5.0=ξ等超调线与根轨迹的交点方法一 ︒=60β,设等超调线与根轨迹交点A s 坐标实部为σ-,则σσ3,j s B A ±-=,有 162)3)(3(2++=++-+as s j s j s σσσσ 令等式两边s 各次项系数分别相等,得⎩⎨⎧==⇒⎪⎩⎪⎨⎧==4216422a aσσσ 方法二 由特征方程01622=++as s ,按照典型二阶系统近似计算得:⎩⎨⎧==⇒⎪⎩⎪⎨⎧==442162a an n n ωξωω 另外,把n n n n j j s ωωωξξω87.05.012+-=-+-=代入特征方程也可求得同样结果。
2-4-6 已知单位负反馈系统的开环传递函数为)1(4/)()(2++=s s a s s G(1)试绘制参数a 由+∞→0变化的闭环根轨迹图;(2)求出临界阻尼比1=ξ时的闭环传递函数。
【解】:(1)系统特征方程为01)144(04401)1(4)(2232=+++⇒=+++⇒=+++s s s a a s s s s s a s等效开环传递函数为: 22)5.0(25.0)144()(+=++='s s a s s s as Ga 由∞→0变化为一般根轨迹。
① 开环极点5.0,03,21=-=-p p 。
② 渐近线与实轴的交点:31-=-σ,渐近线倾角:︒︒︒=300,180,60θ。
③ 实轴上的根轨迹在区间]0,(-∞。
④ 分离点 由 0)()()()(='-'s Q s P s Q s P 得 025.0232=++s s 解得5.01-=s 为起点,17.0612-=-=s 为分离点。
074.0=a 。
⑤ 根轨迹与虚轴的交点 令ωj s =,代入特征方程得⎩⎨⎧==⇒⎩⎨⎧=+-=+-⇒=++--15.0025.0025.0025.025.02323a a a j j ωωωωωωω⑥ 该系统根轨迹如题2-4-6解图所示。
第四章根轨迹答案4-1 解根轨迹3条分支,起始于0,-1±j,终止于无穷远。
渐近线在实轴上的交点是-2/3,实轴根轨迹:(-∞.0],根轨迹出射角是45°,与虚轴交点是±2j,k=4。
4-2解该系统具有三个开环极点:P l=P2=0和P3=0.01以及两个零点:Z1=-0.1和Z 2=-1.66。
(1)根轨迹有—条渐近线,其与实轴正方向的夹角为180°。
(2)根轨迹与实轴会合点坐标d1=0,d2=-3.4(3)根轨迹与虚轴交点坐标为(0,j0)、(0,j0.385)及(0,-0.385);k=0.0844-3 解:特征根全是负实数,系统瞬态响应无振荡分量。
根轨迹与实轴的分离点和会合点分别是-1.17和-6.83,对应的K为0.686和23.314,故K<0.686或K>23.32。
4-44-54-64-7 解根轨迹交虚轴于,对应的K 值为11,当K 〉11不稳定。
4-8 解11S =-+11111112413903906030180()()()()()((G s H s s s s tg tg --∠=∠+-∠+-∠+=∠∠+-∠+=--=---=-所以s 1在根轨迹上。
1111112411212()(),k G s H s S S S k k ==+++====4-9 解分离点是-1.3l ,对应的k 是12.6,根轨迹与虚轴交于458.j =±;对应的K 是210。
当12.6<K<210时,系统共有一对负实部共扼复(虚)数极点,具有欠阻尼阶跃响应。