常用单元的刚度矩阵
- 格式:doc
- 大小:274.00 KB
- 文档页数:11
![单元刚度矩阵(整体坐标系)[详细]](https://uimg.taocdn.com/f345a078da38376baf1faedf.webp)
单元刚度矩阵及其元素的特点
单元刚度矩阵是在有限元分析中使用的重要概念。
它是描述单
元内部应力和应变关系的工具,通常用于分析结构的强度和稳定性。
单元刚度矩阵的元素特点包括:
1. 对称性,单元刚度矩阵是对称的,即其(i, j)和(j, i)位置
的元素相等。
这是由于材料的弹性性质决定的,对称性简化了计算
过程。
2. 正定性,单元刚度矩阵是正定的,这意味着对于任意非零的
向量,其与单元刚度矩阵相乘后的结果仍为正数。
这一特性保证了
单元的稳定性和可靠性。
3. 局部坐标系,单元刚度矩阵的元素是相对于局部坐标系而言的,这意味着在全局坐标系下需要进行坐标变换才能得到全局刚度
矩阵。
4. 尺寸,单元刚度矩阵的尺寸取决于单元的自由度数量。
例如,对于二维单元而言,3节点三角形单元的单元刚度矩阵是6x6的,4
节点矩形单元的单元刚度矩阵是8x8的。
5. 形状函数的影响,单元刚度矩阵的元素受到所采用的形状函数的影响,不同的形状函数会导致不同的单元刚度矩阵。
总的来说,单元刚度矩阵的特点包括对称性、正定性、局部坐标系、尺寸和受形状函数影响。
这些特点对于理解和应用单元刚度矩阵在有限元分析中起着重要作用。
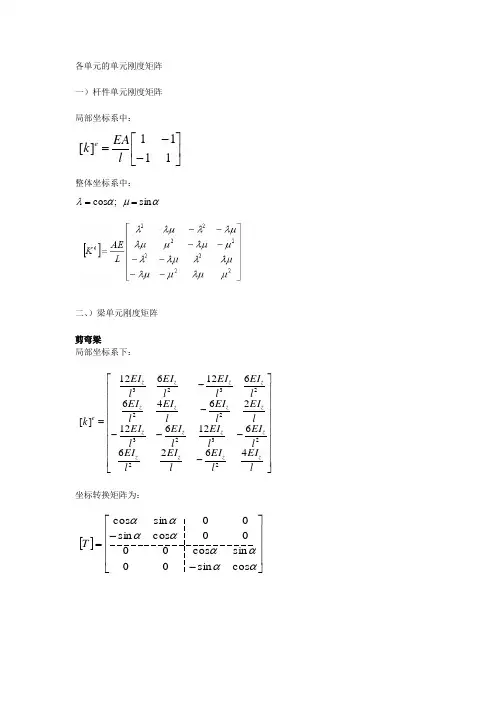
各单元的单元刚度矩阵一)杆件单元刚度矩阵局部坐标系中:整体坐标系中:αμαλsin ;cos ==二、)梁单元刚度矩阵剪弯梁局部坐标系下:坐标转换矩阵为:⎥⎦⎤⎢⎣⎡--=1111][l EA ke ⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡------=l EI l EI l EI l EI l EI l EI l EI l EI l EI l EI l EI l EI l EI l EI l EI l EI k z z z z z z z z z z z z z z z z e 46612266122661246612][223223223223[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=ααααααααcos sin 00sin cos 0000cos sin 00sin cos T轴剪弯梁局部坐标系下:坐标转化矩阵为:三、)平面三节点三角形单元刚度矩阵{}[]{}e N δδ=⎥⎥⎦⎤⎢⎢⎣⎡=m j i m j i N N N N N N N 000000][ )(21y c x b a AN i i i i ++=; ),,(m j i i = j m m j i y x y x a -=,m j i y y b -=,j m i x x c -=。
单元为等腰直角三角形,直角边长为1。
泊松比为0,弹性模量为1。
(单元节点编号为逆时针i ,j ,m ;直角顶点为m )[]⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--------=l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA l EI l EI l EI l EI l EI l EI l EI l EI l EA l EA K e 460260612061200000260460612061200000222322222223[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--=1000000sin cos 0000sin cos 0000001000000cos sin 0000sin cos ααααααααT⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡------=23211212102302121110002*********][E k e 1)集中力:}{][}{P N R T e =⎭⎬⎫⎩⎨⎧⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧y x y x m m j j i i m m j j i i P P N N N N N N Y X Y X Y X p p ),(000000 2)体力:⎰⎰=tdxdy p N R T e }{][}{3)分布面力:⎰=s T e tds P N R }{][}{例题3:在均质、等厚的三角形单元ijm 的ij 边上作用有沿x 方向按三角形分布的载荷,求移置后的结点载荷。
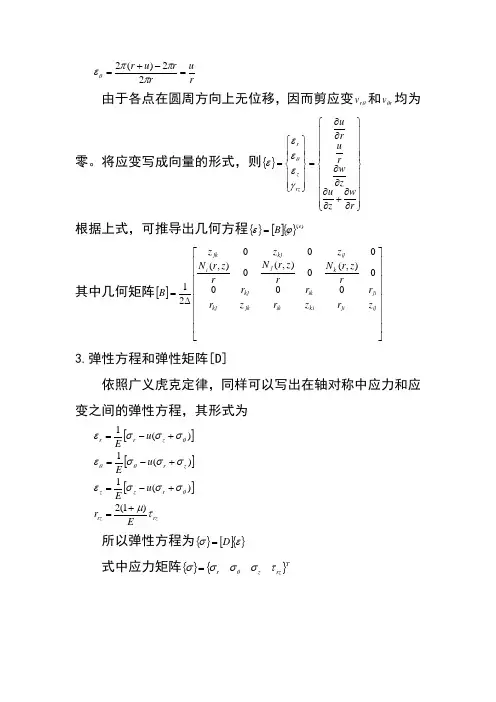
rur r u r =-+=πππεθ22)(2由于各点在圆周方向上无位移,因而剪应变θr v 和r v θ均为零。
将应变写成向量的形式,则{}⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧∂∂+∂∂∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=r w z u z w r u r u rz z r γεεεεθ根据上式,可推导出几何方程{}[]{})(e B ϕε=其中几何矩阵[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∆=ij jikiikjkkj ji ik kj k j i ijkjjkz r z r z rr r r r z r N r z r N r z r N z z z B 0000),(0),(0),(00021 3.弹性方程和弹性矩阵[D]依照广义虎克定律,同样可以写出在轴对称中应力和应变之间的弹性方程,其形式为[])(1θσσσε+-=z r r u E [])(1z r u E σσσεθθ+-=[])(1θσσσε+-=r z z u Erz rz Er τμ)1(2+=所以弹性方程为{}[]{}εσD = 式中应力矩阵{}{}T rz z r τσσσσθ=弹性矩阵[]⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-----+=221000010101)21)(1(μμμμμμμμμμμμED 4.单元刚度矩阵[])(e k与平面问题相同,仍用虚功原理来建立单元刚度矩阵,其积分式为[][][][]dV B D B k VT e ⎰=)(在柱面坐标系中,drdz dV π2=将drdz dV π2=代入[][][][]dV B D B k VT e ⎰=)(,则[][][][]rdrdz B D B k T e ⎰⎰=π2)(即为轴对称问题求单元刚度矩阵的积分式。
与弹性力学平面问题的三角形单元不同,在轴对称问题中,几何矩阵[B]内有的元素(如rz r N i ),(等)是坐标r 、z 的函数,不是常量。
一维变截面杆单元的单元刚度矩阵在结构力学中,一维变截面杆单元是一种常用的数学模型,用于分析和计算结构中的杆件。
该单元的单元刚度矩阵是一个重要的概念,用于描述杆件在受力作用下的刚度特性。
本文将介绍一维变截面杆单元的单元刚度矩阵的计算方法和应用。
一维变截面杆单元是一种理想化的模型,用于近似描述实际结构中的杆件。
它假设杆件在轴向受力作用下,其变形和应力分布均为线性的。
这种假设在许多工程问题中是合理的,并且可以简化计算过程。
为了计算一维变截面杆单元的单元刚度矩阵,我们首先需要定义杆单元的几何特性和材料特性。
几何特性包括杆件的长度、截面积和惯性矩,而材料特性包括杨氏模量和截面的剪切模量。
假设一维变截面杆单元的长度为L,截面积为A,惯性矩为I,杨氏模量为E,剪切模量为G。
根据杆件的线弹性理论,可以得到单元刚度矩阵的表达式如下:[K] = [k] * L其中,[K]是单元刚度矩阵,[k]是单位长度的刚度矩阵。
单位长度的刚度矩阵可以通过以下公式计算:[k] = [k_axial] + [k_bending] + [k_torsion][k_axial] = EA / L * [1 -1; -1 1][k_bending] = 12EI / L^3 * [1 -1; -1 1][k_torsion] = GJ / L * [1 -1; -1 1]其中,EA / L是轴向刚度系数,12EI / L^3是弯曲刚度系数,GJ / L是扭转刚度系数。
[1 -1; -1 1]是一个2x2的矩阵,用于描述杆单元的两个节点之间的相对位移。
通过计算上述公式,我们可以得到一维变截面杆单元的单元刚度矩阵。
这个矩阵描述了杆单元在受力作用下的刚度特性,可以用于计算结构中的位移、应力和应变。
一维变截面杆单元的单元刚度矩阵在结构力学中有广泛的应用。
它可以用于分析和计算各种结构中的杆件,如桥梁、建筑物和机械设备。
通过将多个杆单元组合在一起,可以建立复杂结构的数学模型,并进行静力和动力分析。
六面体单元单元刚度矩阵
六面体单元的单元刚度矩阵是计算结构力学中的重要概念。
它描述了六面体单
元在应力和应变作用下的刚度特性。
首先,我们需要了解什么是六面体单元。
六面体单元是由六个平面面片构成的
立方体。
在结构力学中,六面体单元常被用来近似表示实际结构中的立方体或类似形状的物体。
通过将结构离散成多个单元,我们可以利用单元刚度矩阵来计算整个结构的刚度特性。
单元刚度矩阵是一个与单元的几何形状和材料特性相关的矩阵。
它描述了单元
受到外力作用时产生的应力和应变之间的关系。
在六面体单元中,单元刚度矩阵是一个6x6的矩阵,表示了三个方向上的平移和转动自由度之间的相互作用。
在计算单元刚度矩阵时,我们需要考虑六面体单元的各个面片之间的相对位移
和受力关系。
这涉及到应力和应变的推导,以及材料的弹性性质和几何形状的影响。
通过对物体的分析和建模,我们可以得到六面体单元的单元刚度矩阵。
单元刚度矩阵的计算是结构力学分析中的一个关键步骤。
它可以用于计算结构
的应力和应变分布、位移响应以及结构的整体刚度矩阵。
通过组合多个单元刚度矩阵,我们可以确定整个结构的刚度特性,并进一步进行应力、变形和位移的分析。
总结而言,六面体单元的单元刚度矩阵是描述六面体单元在应力和应变作用
下的刚度特性的重要工具。
通过计算单元刚度矩阵,我们可以进一步分析和优化结构的强度和刚度。
它在工程领域中具有广泛的应用,例如在建筑结构设计、机械工程和航空航天领域等。
§2-4 单元刚度矩阵第四步:利用平衡方程,建立节点力和节点位移之间的关系,即用单元节点位移表示节点力。
上节己给出了用节点位移表示单元应力和应变。
本节来推导单元节点力和节点位移之间的关系。
一、 节点力和节点位移间的关系节点力是指弹性体离散化之后,外载、约束和其他单元通过节点作用在某一单元上的力。
对于己从整体结构中取出来的单元来说,作用在其上的节点力就是外力。
这些节点力在单元内部会引起相应的应力。
当整体处于平衡状态时,单元在节点力作用下也处于平衡状态。
在平面问题中节点力有二个分量,分别用U 和V 加节点号下标表示该节点水平和垂直节点力分量(有时还再加单元号上标表示该单元上的节点力)。
节点力的方向以节点对单元的力沿坐标正方向为正,反之为负。
对三节点三角形单元来讲,共有六个节点力分量(如图2-11所示)。
用列阵表示为:{}[][]e TTT T T i j m i i jjm m F F F F U V U V U V ==; {}[] (T i i i F U V i ,j ,m = (2-24)1. 虚位移原理为了推导单元的节点力与单元节点位移之间的关系,要用到虚位移原理。
2. 节点力和节点位移间的关系虚位移原理在一处于平衡状态的单元上的数学描述为:单元上节点力(外力)在某一虚位移上所作的虚功应等于单元应力(内力)在相应虚应变上所作的虚功。
设单元节点处的虚位移为{}**********()()()e TTTT T iijmiijjmmuvuvuv δδδδ⎡⎤⎡⎤==⎣⎦⎣⎦;{}*iδ=⎭⎬⎫⎩⎨⎧**i i v u (i,j,m ) (2-25) 采用和真实位移相同的位移模式,则单元内各点的虚位移为[]e TN v u f }]{[}{****δ== (a)相应虚应变为{}[]{}εδ**=B e(b)于是虚功方程可写成{}{}⎰⎰=eTe T e yt x F d d }{)}({**σεδ (2-26)将(b)式及(2-18)式代入上式,得[]{}[][]{}({}){}()d d **δδδe T e eT eeF B D B x yt =⎰⎰根据矩阵乘法逆序法则,上式可以写成[][][]{}({}){}({})d d **δδδe T e e T TeeF B D B x yt =⎰⎰由于列阵{}e*δ中的元素是常量,即与单元内点的位置坐标x ,y 无关,上式右边的Te )}({*δ可以提到积分号前面去。
1§2-4 单元刚度矩阵第四步:利用平衡方程,建立节点力和节点位移之间的关系,即用单元节点位移表示节点力。
上节己给出了用节点位移表示单元应力和应变。
本节来推导单元节点力和节点位移之间的关系。
一、 节点力和节点位移间的关系节点力是指弹性体离散化之后,外载、约束和其他单元通过节点作用在某一单元上的力。
对于己从整体结构中取出来的单元来说,作用在其上的节点力就是外力。
这些节点力在单元内部会引起相应的应力。
当整体处于平衡状态时,单元在节点力作用下也处于平衡状态。
在平面问题中节点力有二个分量,分别用U 和V 加节点号下标表示该节点水平和垂直节点力分量(有时还再加单元号上标表示该单元上的节点力)。
节点力的方向以节点对单元的力沿坐标正方向为正,反之为负。
对三节点三角形单元来讲,共有六个节点力分量(如图2-11所示)。
用列阵表示为:{}[][]eTTT TTijm iijj m m F F F F U V UV U V ==; {}[] (Ti i i F U V i ,j ,m= (2-24) 1. 虚位移原理为了推导单元的节点力与单元节点位移之间的关系,要用到虚位移原理。
2. 节点力和节点位移间的关系虚位移原理在一处于平衡状态的单元上的数学描述为:单元上节点力(外力)在某一虚位移上所作的虚功应等于单元应力(内力)在相应虚应变上所作的虚功。
设单元节点处的虚位移为{}**********()()()eTTTTTii j m iijjmm u v u v u v δδδδ⎡⎤⎡⎤==⎣⎦⎣⎦;{}*iδ=⎭⎬⎫⎩⎨⎧**i i v u (i,j,m ) (2-25) 采用和真实位移相同的位移模式,则单元内各点的虚位移为[]eTN vuf }]{[}{****δ== (a)相应虚应变为{}[]{}εδ**=B e(b)2 于是虚功方程可写成{}{}⎰⎰=eT e T e ytx F d d }{)}({**σεδ (2-26)将(b)式及(2-18)式代入上式,得[]{}[][]{}({}){}()d d **δδδe T eeTeeF B D B x yt =⎰⎰根据矩阵乘法逆序法则,上式可以写成[][][]{}({}){}({})d d **δδδeTeeTTeeF B D B x yt =⎰⎰由于列阵{}e*δ中的元素是常量,即与单元内点的位置坐标x ,y 无关,上式右边的T e )}({*δ可以提到积分号前面去。
rur r u r =-+=πππεθ22)(2由于各点在圆周方向上无位移,因而剪应变θr v 和r v θ均为零。
将应变写成向量的形式,则{}⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧∂∂+∂∂∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=r w z u z w r u r u rz z r γεεεεθ根据上式,可推导出几何方程{}[]{})(e B ϕε=其中几何矩阵[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∆=ij jikiikjkkj ji ik kj k j i ijkjjkz r z r z rr r r r z r N r z r N r z r N z z z B 0000),(0),(0),(00021 3.弹性方程和弹性矩阵[D]依照广义虎克定律,同样可以写出在轴对称中应力和应变之间的弹性方程,其形式为[])(1θσσσε+-=z r r u E [])(1z r u E σσσεθθ+-=[])(1θσσσε+-=r z z u Erz rz Er τμ)1(2+=所以弹性方程为{}[]{}εσD = 式中应力矩阵{}{}T rz z r τσσσσθ=弹性矩阵[]⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-----+=221000010101)21)(1(μμμμμμμμμμμμED 4.单元刚度矩阵[])(e k与平面问题相同,仍用虚功原理来建立单元刚度矩阵,其积分式为[][][][]dV B D B k VT e ⎰=)(在柱面坐标系中,drdz dV π2=将drdz dV π2=代入[][][][]dV B D B k VT e ⎰=)(,则[][][][]rdrdz B D B k T e ⎰⎰=π2)(即为轴对称问题求单元刚度矩阵的积分式。
与弹性力学平面问题的三角形单元不同,在轴对称问题中,几何矩阵[B]有的元素(如rz r N i ),(等)是坐标r 、z 的函数,不是常量。
因此,乘积[][][]B D B T 不能简单地从式[][][][]rdrdz B D B k T e ⎰⎰=π2)(的积分号中提出。
如果对该乘积逐项求积分,将是一个繁重的工作。
一般采用近似的方法:用三角形形心的坐标值代替几何矩阵[B]的r 和z 的值。
用[]B 表示在形心),(z r 处计算出的矩阵[B]。
其中3)(,3)(k j i k j i z z z z r r r r ++=++=只要单元尺寸不太大,经过这样处理引起的误差也不大。
被积函数又成为常数,可以提出到积分号外面:[][][][][][][]∆==⎰⎰r B D B rdrdz B D B k TTe ππ22)(式中∆——三角形的面积。
由式[][][][][][][]∆==⎰⎰r B D B rdrdz B D Bk TTe ππ22)(可以看出,两轴对称的三角形单元,当形状、大小及方位完全相同而位置不同时,其刚度矩阵也不相同。
距离主轴线越远的单元,其刚度越大。
这与平面问题不一样。
二、等参数的刚度矩阵对一些由曲线轮廓的复杂结构,如果采用直角边单元进行离散,由于用直线代替了曲线,除非网格划分得很细,否则不能获得较高的精度;对另一些应力随坐标急剧变化的结构,采用简单的常应力单元离散时,也必须划分成大量的微小单元,以保证足够的精度。
为此引入一种高精度的单元——等参数单元。
它既能简化复杂单元划分的工作,又能在满足同样精度的要求时,大大减少使用的单元数。
目前流行的大程序中较常用,它成功地解决了许多二维和三维的弹性力学问题。
为导出等参数单元的刚度矩阵,首先要建立根据每个单元的形状确定的自然坐标系,然后将位移模式和形状函数都写成自然坐标的函数。
一个单元在自然坐标系的点余元整体坐标系的点成一一对应的关系。
通过映射,可以将整体坐标系中的图形转化为自然坐标系中的相应徒刑。
例如可以将整体坐标系中的一个任意四边形(实际单元)映射到自然坐标系中成为一个正方形(基本单元)。
同样也可以将任意四面体、六面体(包括直边和曲边的)分别映射成正四面体和正六面体。
这里只介绍较简单的一种平面问题的情况,将整体坐标系中的一个任意四边形映射成自然坐标系中的一个正方体,并导出单元刚度矩阵。
其它种单元的映射,可依次原理进行。
不再叙述。
1. 位移模式和形状函数图4-2中的任意四边形单元上,作连接对边中点的直线,取其交点为原点,这两条直线分别为ξ和η轴,并令四条边上的ξ和η值分别为1±,建立一个新的坐标系,称之为该单元的自然坐标系。
原坐标系XOY 称为整体坐标系。
在整体坐标系中,自然坐标系非正交,它由任意四边形的形状所确定。
图4-19如果将自然坐标系改画成直角坐标系,那么图4-19(a )中的任意四边形单元就成为图4-19(b )所示的正方形。
上述两个四边形的点(包括顶点)一一对应,即它们之间相互映射。
因此,需要写出整体坐标X 、Y 和自然坐标ηξ、之间的坐标转换式,即ξηαηαξααξηαηαξαα87654321+++=+++=Y X *四边形四个顶点的坐标值在XOY 坐标系中分别为()()()()44332211,,,,,,,Y X Y X Y X Y X :在ηξo 坐标系中相应为()()()()1,1,1,1,1,1,1,1----。
将有关数据代入*中的第一式,则有43214432134321243211,,αααααααααααααααα-+-=+++=--+=+--=X X X X求解上述方程组得:4,44,443214432134321243211X X X X X X X X X X X X X X X X -+-=++--=-++-=+++=αααα坐标变换方程*成为()()()()[]4321111141X X X X X ξηηξξηηξξηηξξηηξ---+++++--+++--=同理()()()()[]4321111141Y Y Y Y Y ξηηξξηηξξηηξξηηξ---+++++--+++--=当引入函数()ηξ,i N 后,坐标变换方程成为()()ii i ii i Y N Y X N X ηξηξ,,4141∑∑====式中()()()ηηξξηξi i i N ++=1141,变量ηξ、的正负号由相应节点的坐标值i i ηξ、决定。
例如当i=4时,1,144=-=ηξ,因此,()()()411,4ηξηξ+-=N 。
下面再来研究函数()ηξ,i N 的特性。
对节点()11,1Y X ,相应的自然坐标值为(-1,-1)。
从式()()()ηηξξηξi i i N ++=1141,中很容易看出,除N 1=1外,N 2=N 3=N 4=0。
对其余各节点也一样。
总而言之,对节点i(i=1,2,3,4),除N i =1外,其余三个N 值均为零。
同时,不难看出()()()()1,,,,4321=+++ηξηξηξηξN N N N ,即四个节点的N i 函数之和等于1。
函数()ηξ,i N 具备上章所介绍的形状函数应满足的条件,可作为本单元的形状函数。
采用()ηξ,i N 做形状函数,其位移模式为()()i i i i i i v N v u N u ηξηξ,,,4141∑∑====对比()()ii i ii i Y N Y X N X ηξηξ,,4141∑∑====和()()i i i i i i v N v u N u ηξηξ,,,4141∑∑====可以看出:在这种实际单元(任意四边形)中,坐标变换式和位移模式不仅采用了相同的形状函数()ηξ,i N ,而且具有相同的数学模型。
这种性质的实际单元称为等参数单元。
对用节点位移值u i (或v i 等)求单元某一点位移量u(或v 等)的插值公式()i i i u N u ηξ,41∑==,只要将u(或v 等)换成X(或Y等),便成为利用节点值X i (或Y i 等)求相应点坐标X(或Y 等)的插值公式。
相反也是这样。
2.几何矩阵[B]由于几何矩阵[B]通过对位移求偏导数而得出,所以首先必须利用复合函数求导的规则得出下述公式[]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂+∂∂∂∂∂∂∂∂+∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂y u X u J u u Y Y u X X u Y Y u X Xu u u ηξηηξξηξ或写成 式中[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=ηηξξY XY XJ ,此式称为雅可比矩阵。
为了将几何矩阵[B]写成变量ηξ、的函数,必须将式[]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂y u X u J u u ηξ改写成 []⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂-ηξu u J y u X u 1,同理,[]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂-ηξv v J y v X v 1 从表示单元各点位移与其应变关系的几何方程可知:{}TY v Xv Yuu v u X YY X ⎭⎬⎫⎩⎨⎧∂∂∂∂∂∂∂∂⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎭⎬⎫⎩⎨⎧⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=ξε0110100000010将式[]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂-ηξu u J y u X u 1和[]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧∂∂∂∂-ηξv v J y v X v 1合并,则[][]TTv v uuJ J Y v Xv Yu Xu ⎭⎬⎫⎩⎨⎧∂∂∂∂∂∂∂∂⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧∂∂∂∂∂∂∂∂--ηξηξ110对单元(e ),任意一点的位移u ,v 对自然坐标ηξ,的偏导数可利用上式求出,写成矩阵形式为:[]{}()e p TN v v u u ψηξηξ=⎭⎬⎫⎩⎨⎧∂∂∂∂∂∂∂∂ 式中{}(){}Te v u v u v u v u 11111111=ψ[][][][][][][][][][][][][][][][][]⎥⎦⎤⎢⎣⎡=pppppppppN N N N N N N N N 4321432100000000对于i=1,2,3,4 []Ti i ip N N N ⎭⎬⎫⎩⎨⎧∂∂∂∂=ηξ将[][]TTv v uuJ J Y v Xv Yu Xu ⎭⎬⎫⎩⎨⎧∂∂∂∂∂∂∂∂⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧∂∂∂∂∂∂∂∂--ηξηξ1100和[]{}()e p TN v v u u ψηξηξ=⎭⎬⎫⎩⎨⎧∂∂∂∂∂∂∂∂代入{}TY v Xv Y uu v u X Y Y X ⎭⎬⎫⎩⎨⎧∂∂∂∂∂∂∂∂⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎭⎬⎫⎩⎨⎧⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=ξε01101000000100,则可得出表示在整体坐标系中位移和应变关系的几何方程:{}()[](){}()e e e B ψε= 式中的几何矩阵[B]是自然坐标ηξ,的函数:[][][][]p N J J B ⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=--1100011010000001也可利用[]Ti i ip N NN ⎭⎬⎫⎩⎨⎧∂∂∂∂=ηξ求得的[]ip N 以及()()ii i ii i Y N Y X N X ηξηξ,,4141∑∑====和[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂=ηηξξY XY X J 求出[]J ,[][][][][]{}Tp p p p Y Y Y Y X X X X N N N N J ⎥⎦⎤⎢⎣⎡=432143214321。