FANUC 机器人由PLC控制外部自动启动,暂停。
- 格式:pdf
- 大小:21.49 MB
- 文档页数:14
FANUC工业机器人常用指令简介FANUC工业机器人是一种广泛应用于工业生产中的自动化设备,其具有高精度、高效率、高可靠性和高稳定性的特点。
为了控制和操作这些机器人,我们需要了解一些常用的指令。
本文档将介绍一些FANUC工业机器人常用指令,包括运动控制指令、传感器与外部设备的指令和系统控制指令。
运动控制指令PTPPTP(Point to Point)是一种常用的运动控制指令,用于控制机器人从一个点(起始点)到另一个点(目标点)的运动。
指令格式:PTP X, Y, Z, A, B, C, VEL, ACC•X, Y, Z:目标点的坐标值。
•A, B, C:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
LINLIN(Linear)指令用于控制机器人沿直线路径运动,从一个点(起始点)到另一个点(目标点),可以控制线性路径上的速度和加速度。
指令格式:LIN X, Y, Z, A, B, C, VEL, ACC•X, Y, Z:目标点的坐标值。
•A, B, C:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
CIRCCIRC(Circular)指令用于控制机器人沿圆弧路径运动。
圆弧由起始点、目标点和中心点定义。
指令格式:CIRC X1, Y1, Z1, A1, B1, C1, X2, Y2, Z2, A2, B 2, C2, VEL, ACC•X1, Y1, Z1:起始点的坐标值。
•A1, B1, C1:起始点的姿态(角度值)。
•X2, Y2, Z2:目标点的坐标值。
•A2, B2, C2:目标点的姿态(角度值)。
•VEL:速度值。
•ACC:加速度值。
传感器与外部设备的指令READREAD指令用于读取外部设备的输入信号值。
指令格式:READ IN[1], IN[2], IN[3], ...•IN[1], IN[2], IN[3]:外部设备的输入信号编号。
WRITEWRITE指令用于写入外部设备的输出信号值。
FANUC_机器人与S7-1200_Profinet通讯一、PLC组态1.新建项目2.添加新设备3.选择CPU类型(注意:版本号要跟硬件一致)4.以太网地址25.添加新子网6.IP协议(注意PLC的IP地址要跟机器人的IP地址在同一个网段)37.设备和网络8.添加机器人(需要先安装好FANUC机器人GSD文件)9.选择硬件目录下→其他现场设备→PROFINETIO→I/O→FANUC→R-30IbEF2→AO5B-2600-R843;FANUCRobotController(1.0)410.组网511.点击未分配612.进入设备视图13.双击r30ib-iodevice(机器人图标)设置机器人IP地址(注意要更机器人中的IP地址一致)714.根据项目的需要添加通讯I/O的字节数(注意这里的起始地址就是跟机器人通讯的首地址)15.PLC输入I的首地址(I68.0开始)816.输出Q的首地址(Q2.0开始)17.转到拓扑视图连接PLC到机器人(选择机器人的Port1就是由上往下的第2个网口)918.编译1011121325.测试机器人的DI1-D12前2位检查通讯结果OK(64个字节I/O)26.测试机器人的DI511-D512后2位,检测通讯结果OK(64个字节I/O)14二、机器人设置1.设置机器人ProfinetIP地址:按下示教器上MEUN键→5I/O→选中I/O2页面→PROFINET(M)→ENTER→选中2频道(备注:2频道是机器人做从站)→按下DISP键→选中IP地址→按下F4键(编辑)→编辑完成后→按下F1键→(适用)→完成IP地址编辑。
1516注意要跟电脑上组态机器人的IP地址一致!2.编辑插槽类型和字节长度:按下示教器上MEUN键→5I/O→选中I/O2页面→PROFINET(M)→ENTER→按下F4键(编辑)→选中输入输出插槽→编辑完成后→按下F1键(适用)→光标移到插槽大小→按下F4键(编辑)选中字节大小→按下F1键(适用)→编辑完成。
利用PLC控制步进电动机的启动与停止作者:杨胜利来源:《中小企业管理与科技·中旬刊》2014年第10期摘要:在一些小型设备和设计精度不高的设备中常常会用到步进电动机,如何让步进电动机启动和停止,是需要我们解决的问题,可以通过不同种方式完成对电机的控制。
关键词:步进电动机 ;PLC ;步进驱动器 ;程序2013年山东省高级技师实训操作试题一:运料小车由步进电动机控制。
这说明步进电动机在一些控制精度不高的设备中已经得到广泛应用。
例如:线切割、简易自动生产线设备都使用步进电动机来完成设备的直线运动。
步进电动机是如何能够旋转的,步进电机是一种将电脉冲信号转化为角位移的执行机构,一般电动机都是连续旋转的,而步进电机的转动是一步一步进行的,每输入一个脉冲电信号,步进电机就转动一个角度,通过改变脉冲频率和数量,可实现步进电机的调速和控制转动的角位移大小,具有较高的定位精度,其最小步距角可达0.75,转动、停止、反转反应灵敏可靠。
而步距角是每输入一个电脉冲信号时转子转过的角度称为步距角,步距角的大小可直接影响电机的运行精度。
步进电机的运行要有一电子装置进行驱动,这种装置就是步进电机驱动器,它是把控制系统发出的脉冲信号,加以放大以驱动步进电机。
步进电机的转速与脉冲信号的频率成正比,控制步进电机脉冲信号的频率,可以对电机精确调速;控制步进脉冲的个数,可以对电机精确定位。
整步:最基本的驱动方式,这种驱动方式的每个脉冲使电机移动一个基本步矩角。
例如:标准两相电机的一圈共有200个步矩角,则整步驱动方式下,每个脉冲可以使电机移动1.8°,而半步是在单相激磁时,电机转轴停至整步位置上,驱动器收到下一个脉冲后,如给另一相激磁且保持原来相继续处在激磁状态,则电机转轴将移动半个基本步矩角,停在相邻两个整步位置的中间。
如此循环地对两相线圈进行单相然后两相激磁,步进电机将以每个脉冲半个基本步矩角的方式转动。
步进电机的相数是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
库卡机器人外部自动运行程序设计摘要:针对库卡机器人外部自动运行,分析了外部自动运行PLC程序设计的思路以及要考虑和注意的一些问题,另外针对库卡机器人cell程序,分析了cell程序的结构以及如何将自己的程序添加到cell程序中。
特别强调了库卡机器人外部自动运行,机器人伺服上电需要严格按照时序的要求编写控制程序。
关键词:外部、自动运行、库卡机器人、设计1、安全门程序设计库卡机器人外部自动运行中,要启动机器人运行前,需要将安全门关闭,保证运行过程中的安全性,不会出现伤及到人身安全的事故。
为此在上机控制器PLC中程序设计中,采用如下图的设计,使用启保停的设计方法,设置两个按钮,按钮SB7用于关闭安全门,按钮SB8用于打开安全门(注意这里的程序设计是用两个按钮模拟安全门的控制,实际的控制中会有区别,实际安全门的控制可以通过安全门上安装传感器来检测安全门的开闭)。
此设计中,机器人周边没有安全围栏,故采用按钮来模拟安全门的开闭。
如果机器人启动运行前,安全门未关闭,机器人会出现报警,机器人无法正常运行。
程序设计如下图:2、外部急停及运行开通程序设计机器人除了示教器上的急停按钮之外,在机器人外部自动运行中,通常会设置外部急停按钮,机器人在运行中万一出现紧急事故,也可以通过外部急停来停止机器人的运行。
设中通过急停按钮来控制外部急停信号。
设计中,外部急停信号通过PLC的Q2.0发信号给机器人控制器,因为急停按钮使用的是常闭触头,所以当急停按钮没有拍下时,I1.0输入继电得电,所以I1.0常开触头闭合,Q2.0输出继电得电,当外部急停按钮拍下时,常闭触头断开,输入继电I1.0掉电,所以Q2.0变成off状态,这时相当于给机器人控制器发送了外部急停信号,机器人会停止运行。
如果上级控制器没有对外部急停的设计,机器人无法运行,会报外部急停的故障,只有故障消除掉后,机器人才可以正常运行。
当上级控制器PLC打到运行状态时,就必须通过PLC发出运行开通的信号给机器人,机器人在运行过程中始终运行开通的信号为on,设计中PLC输出的运行开通信号是Q17.2,这个输出的信号和库卡机器人的输入信号存在着对应关系,前提条件是做好了workvisual的配置和博图软件的正确组态,如果信号的对用关系错误,会导致无法正常运行,在设计这部分之前,应先搞清楚信号的对应关系。
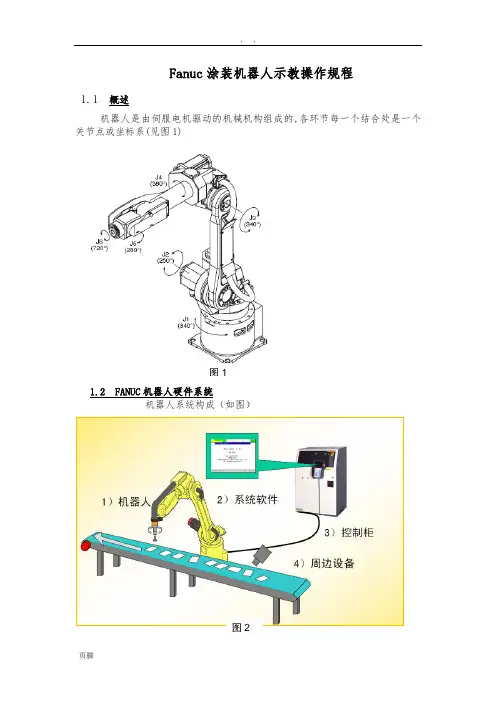
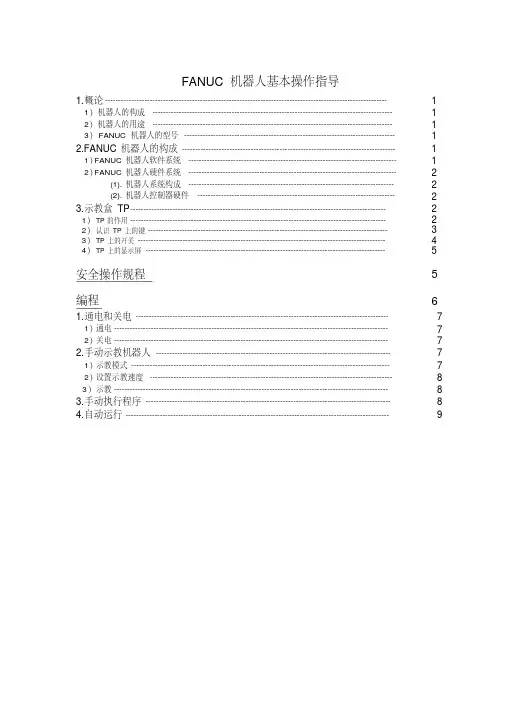
Fanuc涂装机器人示教操作规程1.1 概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)图11.2 FANUC机器人硬件系统机器人系统构成(如图)1.3示教盒TP1.3.1 认识TP 上的键(见图4)图4Pre :显示上一屏幕DISP :分屏显示 STEP:单步运行 Reset :复位键 数字键MENU:菜单Select :程序选择界面 Edit 、:程序编辑界面 DATA:参数设置界面 FCTN:功能键机器人动作键 正向运行程序键 反向运行程序键 坐标系切换键 速度加减键1.3.2 TP上的开关1.3.3 TP的显示屏. 安全操作规程1.4 示教和手动机器人1) 请不要带者手套操作示教盘和操作盘。
2) 在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3) 在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4) 要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
5) 机器人周围区域必须清洁、无油,水及杂质等。
1.5 生产运行1)在开机运行前,须知道机器人根据所编程序将要执行的全部任务。
2)须知道所有会左右机器人移动的开关、传感器和控制信号的位置和状态。
3)必须知道机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下按这些按钮。
4)永远不要认为机器人没有移动其程序就已经完成。
因为这时机器人很有可能是在等待让它继续移动的输入信号。
1.6操作机器人1.6.1 通电和关电1.通电1)接通电源前,检查工作区域包括机器人、控制器等。
检查所有的安全设备是否正常。
2)将操作者面板上的断路器置于ON2.关电1)关闭电源前,确保机器人处于静止状态2)将操作者面板上的断路器置于OFF注意:如果有外部设备诸如打印机、软盘驱动器、视觉系统等和机器人相连,在关电前,要首先将这些外部设备关掉,以免损坏。
1.6.2手动示教机器人1.示教模式(见表1,图1)图1设置示教模式,按TP上的COORD键进行选择。

PLC实现机器人的自动控制周永志;袁少帅;沈阳机床【期刊名称】《金属加工:冷加工》【年(卷),期】2010(000)001【总页数】3页(P68-70)【作者】周永志;袁少帅;沈阳机床【作者单位】沈阳机床(集团)成套设备有限责任公司,辽宁,110142;沈阳机床(集团)成套设备有限责任公司,辽宁,110142;沈阳机床(集团)成套设备有限责任公司,辽宁,110142【正文语种】中文工业机器人已经广泛应用于机械制造业中代替人完成具有大批量、高质量要求的工作。
20世纪90年代,工业机器人的价格不断下降,而性能则不断完善,如搬运能力、速度、工作范围、部件数量及平均故障间隔时间都有较大改进,而价格也下降了不少。
这使机器人的广泛使用成为了必然的趋势。
机器人多用在自动工位上,由外围设备控制程序启动和运行,实现自动控制。
本文介绍FANUC系统机器人由GE PLC实现自动控制。
1.系统的结构和功能本系统是基于PROFIBUS现场总线的工业过程控制局域网。
由PLC系统和机器人系统组成。
本系统采用分散型I/O控制方案,与传统的集中型控制方案相比,具有节省电缆、排除故障方便等优点。
系统结构如图1所示。
图1PLC系统包含一台GE PLC90-30可编程序控制器和一台GE QUICKPANEL触摸屏HMI,PLC完成机器人的程序控制和信号采集,HMI完成显示和控制管理功能。
机器人系统包含FANUCRJ3机器人及外围设备组成,设备之间通过PROFIBUS现场总线连接,机器人PROFIBUS A卡连接PLC的PROFIBUS通讯模块,机器人PROFIBUS B卡连接机器人的外围设备站点。
PLC对机器人的控制属于自动控制,通过PLC实现不同条件时对机器人不同程序的调用与控制,实现同一台机器人完成不同工作的柔性化控制。
同时机器人程序运行过程中PLC对机器人的特定段进行分段控制,对特定运动区域进行进入禁止保护,同时PLC处理采集机器人及外围设备信号。
发那科机器人的正确操作方法及步骤
1、通电
1)将操作者面板上的断路器置于ON
2)接通电源前,检查工作区域包括机器人、控制器等。
检查所有的安全设备是否正常。
3)将操作者面板上的电源开关置于ON
2、关电
1)通过操作者面板上的暂停按钮停止机器人
2)将操作者面板上的电源开关置于OFF
3)操作者面板上的断路器置于OFF
注意:如果有外部设备诸如打印机、软盘驱动器、视觉系统等和机器人相连,在关电前,要首先将这些外部设备关掉,以免损坏。
3、示教模式
关节坐标示教(Joint)
通过TP上相应的键转动机器人的各个轴示教
直角坐标示教(XYZ)
沿着笛卡儿坐标系的轴直线移动机器人,分两种坐标系:
1)通用坐标系(World):机器人缺省的坐标系
2)用户坐标系(User):用户自定义的坐标系
工具坐标示教(Tool)
沿着当前工具坐标系直线移动机器人。
工具坐标系是匹配在工具方向上的笛卡儿坐标系设置示教模式,按TP上的COORD键进行选择。
屏幕显示
JOINT→JOG→TOOL→USER→JOINT
状态指示灯
JOINT→XYZ→TOOL→XYZ→JOINT。
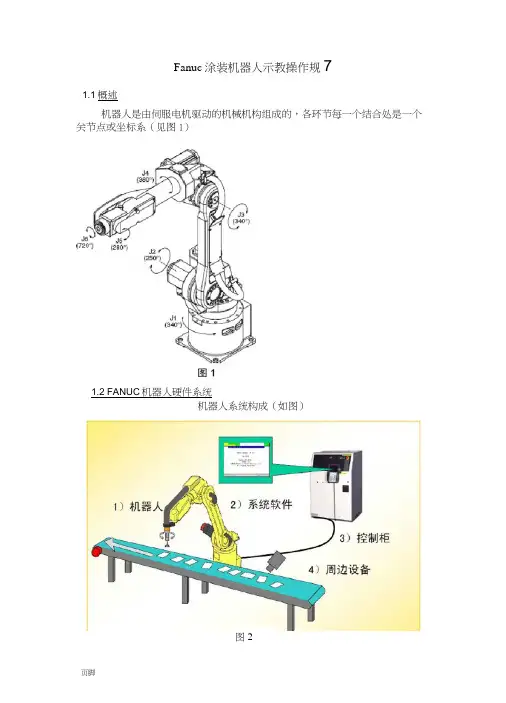
Fanuc涂装机器人示教操作规71.1概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)1.2 FANUC机器人硬件系统机器人系统构成(如图)图21.3示教盒TP1.3.1认识TP 上的键(见图4)Pre :显示上一屏 幕 F4F5Reset:复位键 SHIFT :与其他 键一起执行。
DISP :分屏显示数字键| STEP:单 | |步运行 |F2MENU:菜单Select :程序选择界面 Edit 、:程序编辑界面 DATA:参数设置畀面 FCTN:功能键机器人动作键 正向运行 程序键 反向运行 程序键 坐标系切 换键1. 3. 2 TP 上的开关(表1) TP 开关此开关控制TP 有效/无效,当TP 无效时,示教、编程、手动运行不能 被使用。
DEADMAN 开关当TP 有效时,只有DEADMAN 开关被按下,机器人才能运动,一旦松开, 机器人立即停止运动。
急停按钮此按钮被按下,机器人立即停止运动。
1.3.3 TP 的显示屏功能键菜单正在被编辑 的程序 一-当前行号 I当前再教坐标系厂SAMPLE 1 LZNC 11HID ‘FADSEDp行号程序结束 标志提示消息3B L * 4 s L. Sv J [End]P(l]WU1PE11PI4] PCL1PAUSEDXOQW nwr 70% CBIT501000e»/*£n C1TT3050*0xm./sec F36TK lftOHFXME •of pre«B ENTKR(CHO前进『后退无i运行状态示敎速度SAHPLK1JOINT 39K正在被执行 的程序 ]POSITION安全操作规程1.4示教和手动机器人1)请不要带者手套操作示教盘和操作盘。
2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
FANUC基本操作指导FANUC基本操作指导1.介绍1.1 FANUC概述1.2 适用范围1.3 目标读者1.4 术语定义2.安全操作2.1 安全要求2.1.1 环境要求2.1.2 设备要求2.1.3 操作人员要求2.2 安全预防措施2.2.1 风险评估2.2.2 防护装置2.2.3 急停按钮2.3 紧急情况处理2.3.1 急停操作2.3.2 应急流程3.基本操作3.1 启动与停止3.1.1 启动程序3.1.2 停止程序3.2 示教模式3.2.1 示教方式选择 3.2.2 示教坐标系统 3.2.3 示教运动指令 3.3 自动模式3.3.1 自动程序创建 3.3.2 自动程序编辑 3.4 运动控制3.4.1 运动模式选择 3.4.2 运动指令详解3.4.3 轨迹规划3.5 编程3.5.1 基本编程概念 3.5.2 语法规则3.5.3 编程实例4.故障排除4.1 常见故障及解决方法 4.1.1 运动异常4.1.2 系统错误4.1.3 控制器故障 4.2 故障诊断工具的使用 4.2.1 报警代码解读 4.2.2 设备诊断工具附件:1.FANUC用户手册2.FANUC软件操作指南注释:1.FANUC - 法那克控制系统的品牌名称2.示教模式 - 允许操作人员通过手动示教来训练运动路径3.自动模式 - 能够按照预先编制的程序自主执行任务4.运动控制 - 控制实现运动轨迹的方向、速度和位置5.编程 - 创建、编辑和管理任务的程序代码本文涉及的法律名词及注释:1.安全法 - 主要针对系统的安全要求和规范进行制定,以保护操作人员和环境安全2.《劳动法》 - 确定劳动关系、保护劳动者权益的法律法规3.《安全生产法》 - 规定生产经营单位的安全生产责任和安全生产要求的法律法规。
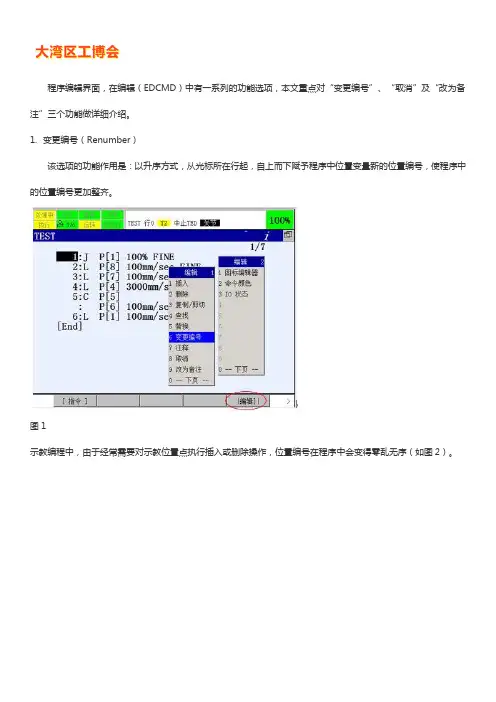
程序编辑界面,在编辑(EDCMD)中有一系列的功能选项,本文重点对“变更编号”、“取消”及“改为备注”三个功能做详细介绍。
1.变更编号(Renumber)该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加整齐。
图1示教编程中,由于经常需要对示教位置点执行插入或删除操作,位置编号在程序中会变得零乱无序(如图2)。
图2通过变更编号功能,可使位置编号在程序中依序排列(如图3)。
图3注意:1、变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。
2、变更编号功能只对位置变量P[i]有效,对位置寄存器PR[i]无效。
具体操作步骤:将光标移至程序首行后①选择F5编辑命令;②选择“变更编号”选项;③选择F4“是”(如图4、图5所示)。
图4备注:由于行1与行6中位置变量相同,都为P[1]。
所以,变更编号后两者编号保持一致。
图52.取消(Undo)该选项的功能作用是:可以撤销指令的更改、行插入、行删除等程序编辑操作。
注意:该功能只能撤销上一步操作,不能撤销多次操作。
下文以行删除为例对该功能进行说明。
原程序如图6所示:图6在原程序中删除1-3行后,程序如图7所示:图7通过使用取消(Undo)功能,能够撤销删除操作,恢复已删除行。
具体操作步骤:①选择F5编辑命令;②选择“取消”;③选择F4“是”(如图8、图9所示)。
图8图9取消后,程序如图10所示。
图103.改为备注(Remark)该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。
原程序如图11,图11该程序对应机器人轨迹如图12,图12将原程序2-4行改为备注后,在行的开头会显示“//”。
改为备注的指令在程序运行中相当于被屏蔽,不会被执行。
将2-4行改为备注后,程序如图13,图13改为备注后的程序执行效果如图14,行2至行4指令内容保留,但不被执行。
图14具体操作步骤:①将光标移至需要改为备注的行号位置;②选择F5编辑命令;③选择“改为备注”选项(如图15);④根据提示,下移光标选中目标对象;⑤选择F4“改为备注”(如图16)。
PLC控制电机顺序启动停止
今天和大家分享一下两台电动机的顺序控制,控制要求如下;
两台电动机按M1,M2的顺序启动。
停止时按M2,M1的顺序停止。
即在启动时,只有当电机M1启动运转后,电动机M2才能启动运转。
在停止时,只有当电动机M2停止后电动机M1才能停止。
具体控制如下;按下电动机M1的启动按钮SB2,接触器KM1闭合并自锁,电动机M1启动运转,然后按下电动机M2的启动按钮SB4,接触器KM2闭合,电动机M2启动运转。
当需要电动机停止时,首先要按下电动机M2的停止按钮SB3,接触器KM2失电,5号线与7号线间接触器KM2的动合触点复位断开,在按下电动机的M1的停止按钮SB1,接触器KM1才能失电,电动机M1才能停止转动。
我们在看一下,用三菱FX2n plc是怎么实现这个功能的。
首先我们分配一下地址;
在看一下三菱FX2n的接线图。
看一下三菱的程序
这是我们用三菱plc来实现顺序控制的,在看一下用西门子200PLC来实现,硬件连接和软件程序编写是怎么的。
首先我们看一下地址分配;
看一下西门子的程序
通过这几个实例可以看出,每款plc虽然各有特点,但是编程的思路基本都是一样的,所以我认为学习编程最重要的还要学习编程的思路。
一个工程的完成都是平时一点一滴的积累。
自动化人永远在路上,同行们加油。
FUNAC点焊机器人站操作手册一、设备开机1﹒开启水源球阀、气压球阀,确认外部主电源220VAC机器人电源、440VAC焊接用电源已开启。
2﹒开启机器人电源(主旋转开关转向上,机器人电源开关按下ON,此时机器人电源灯亮起,进行开机约需30秒)。
3﹒按下设备启动绿色按纽,2秒后上方的塔灯,绿色灯亮起,请注意此时若红灯也亮起,请至PLC箱看异常讯息查看何项设备有异常(若紧急停止按着,绿色灯不会亮,设备不会启动)。
4﹒请确认机器人教导器,左边第三个STEP灯未亮起(若有亮绿灯,请按STEP按纽消除)确认教导器ON/OFF开关切至OFF,确定异常灯未亮红灯(若有请按复归),确认机器人程序已归零,可进行维护呼叫作确认。
此时设备已开启,可进行生产。
二、设备关机1﹒按下设备停止红色按纽,此时塔灯绿灯熄灭,若塔灯红色灯有闪烁,请按警报停止红色按纽。
2﹒按下机器电源开关变OFF,此时机器人电源灯熄灭,机器人即关机完成;若要长时间停机(超过一天),请将下方的电源总开关旋转至水平OFF位置。
3﹒关闭水源、气源,及焊接440VAC电源。
三、机器人预约程序1﹒请确认所有滑台皆在外围,且滑台气缸上的外定位磁簧有感应亮灯。
此时按下预约纽,预约灯亮起(若外定位未感应到,则无法预约)。
2﹒PLC依滑台工程1、2、3、4,次序扫描,当本站预约扫描到此时检查夹具感应Sensor是否有感应到(检知为X2A、X2B、X2C、X2D、X2E共五个讯号ON, X28,X29讯号OFF;,若未符合条件,此时预约灯会自动熄灭,塔灯红色异常灯闪烁,人机界面异常讯息会出现本站夹具夹紧检知异常,或板件检知异常,错误讯息未按警报停止清除将一直存在, 但若再次预约而且检查正常,此时错误讯息消除。
3﹒滑台检知正常,机器人移动即往夹具,在机器人未动作之前按下取消,可停止程序继续进行, 焊接中途若要夹具打开,请将中途打开之传感器接至X2F。
4﹒滑台前进到前定位,前定位感应磁簧灯亮起,即开始机器人呼叫启动程序,若机器人未待机(教导器未切OFF,教导器在步进STEP灯亮状态,机器人在其他程序程序中未完成,程序未归零,机器人异常灯亮起有异常讯息,共四种状态)则无法启动机器人,此时塔灯异常红灯亮起,人机界面显示本站机器人启动异常,程序停止,请将设备停止按下,手动将滑台后退,复原机器人至待机(A:STEP灯OFF、B:教导器OFF、C:FCTN+ENTER程序归零),重新按设备启动后重来。
FANUC机器人基本操作指导1.概论----------------------------------------------------------------------------------------------------------- 1 1)机器人的构成------------------------------------------------------------------------------------------- 1 2)机器人的用途------------------------------------------------------------------------------------------- 1 3)FANUC机器人的型号-------------------------------------------------------------------------------- 12.FANUC机器人的构成--------------------------------------------------------------------------------- 1 1)FANUC机器人软件系统------------------------------------------------------------------------------- 1 2)FANUC机器人硬件系统------------------------------------------------------------------------------- 2(1). 机器人系统构成------------------------------------------------------------------------------ 2(2). 机器人控制器硬件--------------------------------------------------------------------------- 23.示教盒TP------------------------------------------------------------------------------------------------- 2 1)TP的作用------------------------------------------------------------------------------------------------- 2 2)认识TP上的键------------------------------------------------------------------------------------------- 3 3)TP上的开关---------------------------------------------------------------------------------------------- 4 4)TP上的显示屏------------------------------------------------------------------------------------------- 5安全操作规程 5 编程 6 1.通电和关电------------------------------------------------------------------------------------------------ 7 1)通电-------------------------------------------------------------------------------------------------------- 7 2)关电-------------------------------------------------------------------------------------------------------- 7 2.手动示教机器人----------------------------------------------------------------------------------------- 7 1)示教模式-------------------------------------------------------------------------------------------------- 7 2)设置示教速度-------------------------------------------------------------------------------------------- 8 3)示教-------------------------------------------------------------------------------------------------------- 83.手动执行程序---------------------------------------------------------------------------------------------84.自动运行----------------------------------------------------------------------------------------------------9一.概论1.机器人的构成是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)图12.机器人的用途Arcwelding(弧焊),Spotwelding(点焊),Handing(搬运),Sealing(涂胶),Painting(喷漆),去毛刺,切割,激光焊接.测量等.3.FANUC机器人的型号主要型号:型号轴数手部负重(kg)M-1iA 4/6 0.5LR Mate 200iC 6 5M-10iA 6 10(6)M-20iA 6 20(10)R-2000iB 6 210/(165等)M-710iC 6 50/(70,20)二.FANUC机器人的构成1. FANUC机器人软件系统Handling Tool 用于搬运Arc Tool 用于弧焊Spot Tool 用于点焊Sealing Tool 用于布胶Paint Tool 用于油漆Laser Tool 用于激光焊接和切割2. FANUC机器人硬件系统1)机器人系统构成(见图2)2)机器人控制器硬件(见图3)三.示教盒TP1.TP的作用图2图31)点动机器人2)编写机器人程序3)试运行程序4)生产运行5)查阅机器人的状态(I/O设置,位置,焊接电流)2.认识TP上的键(见图4)图4新版彩色TP,如下图3.TP 上的开关(见图5)图5(表1)TP开关此开关控制TP有效/无效,当TP无效时,示教、编程、手动运行不能被使用。
发那科机器人操作说明书发那科机器人是一种高性能的机器人,可以用于各种工业生产中,具有高效、精准、稳定等特点。
本文将详细介绍发那科机器人的操作方法,以帮助使用者更好地掌握其操作技能,提高工作效率。
一、机器人基本结构发那科机器人由机器人本身和控制系统两部分组成。
机器人包括机械臂、电机、传感器等,控制系统则由机器人控制器、电脑等组成。
机械臂是机器人的重要组成部分,由臂体和关节组成,可灵活运动。
电机控制机械臂的运动,传感器可以监测机械臂的位置、角度、速度等参数。
机器人控制器相当于机器人的“大脑”,负责控制机器人的动作。
二、机器人操作方法1. 机器人基本操作(1)启动机器人将机器人控制器通电,并启动控制软件。
检查机器人的电缆和气管是否连接正常,确保机器人运行安全无故障。
(2)调整机器人姿态通过控制软件调整机器人姿态,确保机器人可以顺利执行任务。
这包括调整机械臂的起始位置、运动轨迹、速度等参数。
(3)设置任务程序设置机器人运动任务程序。
可以通过手动编程或使用预先设计好的程序实现。
(4)启动任务启动任务程序,让机器人开始工作。
可以通过监控机器人运动情况,及时调整机器人的运动模式和运动轨迹,确保机器人可以准确完成任务。
2. 机器人高级操作(1)复杂路径的规划与处理对于一些复杂的工业生产任务,需要机器人完成复杂的路径规划和处理。
这包括使用机器视觉系统和三维建模软件,对工作场景进行模拟和分析,制定机器人路径规划方案,并使用控制软件进行编程。
(2)机器人联动控制在一些需要多台机器人协同完成的工业生产场景中,需要实现机器人联动控制。
这需要在机器人控制系统中设置多个控制程序,并根据机器人的位置和状态进行实时控制,保证机器人可以协调配合,达到高效的生产效果。
三、安全操作要点机器人具有高效、精准、稳定等特点,但是在操作机器人时,需要注意安全。
以下几点是机器人操作中需要特别注意的安全事项。
(1)保持机器人周围的安全区域,避免人员进入机器人作业区域,避免发生意外伤害事故。
FANUC机器人操作说明书资料FANUC机器人操作说明书资料一、安全注意事项在使用FANUC机器人之前,请务必阅读以下安全注意事项,确保操作过程的安全性:1、机器人操作应由经过充分培训且熟悉机器人系统的操作员进行。
未经授权的人员操作可能导致人身伤害或设备损坏。
2、确保机器人运行区域内的安全。
在操作机器人之前,清除杂物,确保机器人移动路径畅通无阻。
3、始终保持机器人周围的工作区域整洁、清晰,以防止意外碰撞。
4、在操作机器人之前,务必确认急停装置的位置并确保其处于良好状态。
5、操作机器人时,必须始终保持警惕,以防潜在的危险。
6、在操作过程中,如果机器人出现任何异常情况,立即按下紧急停止按钮,以停止机器人运动。
7、定期对机器人进行维护和检查,以确保其始终处于良好状态。
二、基本操作以下是FANUC机器人的基本操作步骤:1、打开机器人控制电源,启动机器人。
2、通过示教器或触摸屏界面,输入机器人程序并加载运行。
3、使用手动控制模式,手动操纵机器人的关节轴,使其移动到所需位置。
4、根据程序设置,调整机器人的运动速度和加速度,以确保安全运行。
5、在运行过程中,根据需要调整机器人的运动轨迹和姿态。
6、当完成程序运行时,通过示教器或触摸屏界面停止程序的执行。
7、关闭机器人电源,结束操作。
三、编程与调试以下是FANUC机器人的编程与调试步骤:1、使用示教器或触摸屏界面进入编程模式。
2、根据所需任务和工艺要求,创建新的机器人程序或修改现有程序。
3、在程序中添加必要的指令和动作,以实现所需的运动路径和姿态。
4、对程序进行调试和优化,确保机器人在安全、稳定和高效的情况下运行。
5、在调试过程中,根据实际运行情况进行必要的参数调整和优化。
6、当程序调试完成后,将其保存并退出编程模式。
7、在实际运行过程中,根据需要随时调整程序参数和指令,以满足不同的工艺需求。
四、维护与保养为了保证FANUC机器人的稳定性和持久性,以下是一些建议的维护与保养操作:1、定期检查机器人的关节轴、传感器和电缆等部件是否有磨损或损坏。
本文介绍了FANUC机器人由PLC外部控制自动启动,暂停,再启动的工作流程。
包含PLC程序和机器人的设定
工作流程
1.UI1 和UI2一直为ON后 ,延时0.5S UI3一直为ON
2,延时0.5s后,UI8一直为ON
3.延时0.5S后。
UI5位ON,过0.5s后 OFF
如果机器人不在暂停状态 第一次启动 UI9 和UI17 ON UI18为ON-OFF
4.延时0.5后。
如果机器人不在暂停状态==UO4 不为ON, 则UI9-16选择程序号ON
5.延时0.5后 如果机器人不在暂停状态==UO4 不为ON, 则UI17为ON
6.UI17 ON了以后,如果机器人不在暂停状态==UO4 不为ON,则UI18为ON 过0.5S后OFF
如果机器人在暂停状态 启动后又暂停了 UI9 U17 UI18 不需要再次启动
7 延时0.5后 。
如果机器人在暂停状态==UO4 为ON, 则UI6为ON.过2S后为OFF
UI1和UI2
UI3和UI8
UI5和UI9-16
机器人示教器设定
机器人启动方式有2种,其实没什么区别,其实根据情况选择,8个机器人输入信号==RSR1-8或PNS1-8 设定流程如下
1.参考资料
选择哪一种启动方式
2.正常状态如下
3.系统设定第一步======
1.专用外部信号==启动
2.所选程序的调用PNS===启动
远程/本地设定===远程
5.系统设定第3步
6. 2种方式其一
PNS==========================================
RSR=====================================
机器人点位介绍
机器人正常启动后的状态如下 可以参考。