自动固晶机操作规程资料讲解
- 格式:doc
- 大小:1.04 MB
- 文档页数:19
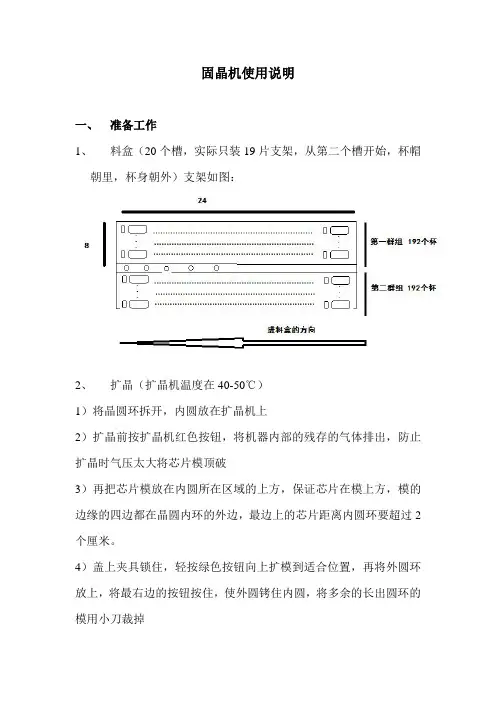
固晶机使用说明一、准备工作1、料盒(20个槽,实际只装19片支架,从第二个槽开始,杯帽朝里,杯身朝外)支架如图:2、扩晶(扩晶机温度在40-50℃)1)将晶圆环拆开,内圆放在扩晶机上2)扩晶前按扩晶机红色按钮,将机器内部的残存的气体排出,防止扩晶时气压太大将芯片模顶破3)再把芯片模放在内圆所在区域的上方,保证芯片在模上方,模的边缘的四边都在晶圆内环的外边,最边上的芯片距离内圆环要超过2个厘米。
4)盖上夹具锁住,轻按绿色按钮向上扩模到适合位置,再将外圆环放上,将最右边的按钮按住,使外圆铐住内圆,将多余的长出圆环的模用小刀裁掉5)取出晶圆,打开锁具,清理多余的模3、胶水(冷藏银胶取出后续要解冻到室温)1)将银胶盘正确安装到固晶机上,将刮片螺旋刮片网上旋转至银胶盘1-2个毫米2)确定银胶盘在转动,添加银胶,胶量自行控制,待胶添加完毕将螺旋刮片慢慢往下转至银胶盘内胶水平状态即可二、程序编辑1)自动固晶-》上下料操作-》单上料盒(第一槽为空)-》下一格-》WHY取料位-》夹具开-》进料-》返回2)返回学习程式,选择空的程序数字进入,输入符号确认3)矩阵系列-》重温/修改4)设置对点一、对点二,固晶点(先找到位置,再鼠标点击相应的按钮)①对点一位置②对点二位置固晶点位置5)输入行数与列数(竖着为行横为列)设置第一点、第二点、第三点,计算矩阵①第一点②第二点③第三点6)返回-》返回-》修改/重温-》多群组操作-》添加群组,设置对点一、对点二,打钩打开跟踪(先找到位置,再鼠标点击按钮)7)返回-》返回-》重温/修改-》确认第一组群对点一对点二,固晶点位置-》下个组群对点一对点二,固晶点位置8)程序编写完成三、校准(每次换吸嘴后必要操作,吸嘴的大小是芯片宽的2/3)1、三点一线:(吸嘴、顶针、影像识别系统(右)在一条直线上)1)清洗位,拔掉固晶臂上方气管,确认晶圆环不在移动区域上2)晶圆显示-》拾晶位,将反光片擦干净放到顶针环帽上3)固晶臂拾晶高度数字改大,再慢慢降(减)至反光片上4)打开影像锁,调整十字线到吸嘴口的中心锁定5)拾晶位,取出反光片-》清洗位,6)顶针拾晶高度7)打开顶针位置锁,调整顶针位置到十字线中心锁定8)顶针重置高度9)完成2、两点一线:(吸嘴、影像识别系统(左)在一条直线上)1)清洗位,拔掉固晶臂上方气管2)载板显示-》找到某一杯的中心3)固晶位4)固晶高度数字改大(向上加),再慢慢降(向下减)至杯中心5)打开影像锁,调整十字线到吸嘴口的中心锁定6)固晶位-》清洗位7)完成四、设置五个高度1、拾晶高度:1)某一芯片中心(十字线对准芯片中心)2)拾晶位,开启三个真空3)拾晶高度从-1500慢慢减至D/C灯灭,再减100以内4)拾晶位2、顶针高度1)清洗位,某一芯片中心(十字线对准芯片中心)2)顶针拾晶高度慢慢升高加至芯片变暗3)顶针重置高度3、固晶高度1)找到某一个杯的中心(十字线对准固晶点的中心)2)固晶位3)固晶高度在原来的基础上上升(加)1000左右,在慢慢降(减)至D/C灯灭,再减200以内4)固晶位4、固浆高度1)找到某一个杯的中心(十字线对准固晶点的中心)2)固浆位,确认银浆头(点胶头)上没有胶水3)固浆高度在原来的基础上上升(加)1000左右,再慢慢降(减)至D/C灯灭4)固浆位5、取浆高度1)取浆位2)取浆高度在原来的基础上加个(上升)200左右,再慢慢降到与胶水有接触。
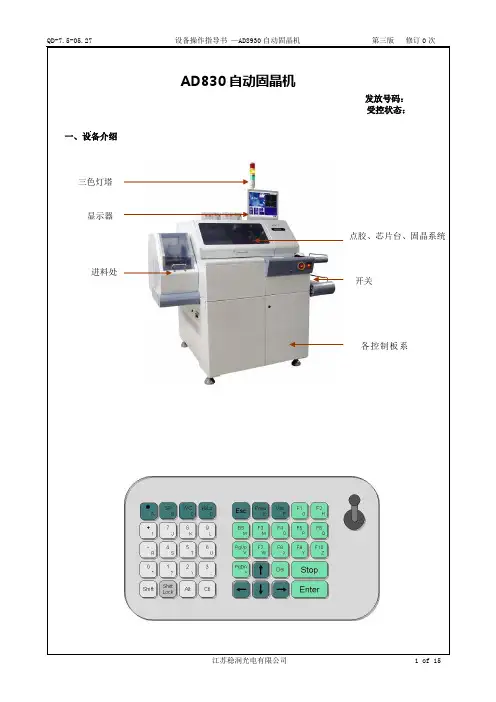
QD-7.5-05.27 设备操作指导书 —AD8930自动固晶机 第三版 修订0次AD830自动固晶机发放号码:受控状态:一、设备介绍三色灯塔显示器进料处点胶、芯片台、固晶系统 开关 各控制板系统QD-7.5-05.27 设备操作指导书—AD8930自动固晶机第三版修订0次键盘控制面板ESC 用于停止一个执行的功能;从子操作表返回到上一级操作表。
ENTER 进入所选的操作表,执行此操作或設定。
SP 用于空格。
BS 用于退格。
Del 用于刪除。
PgUp、PgDn 向上或向下翻动页面。
↑↓←→向上、向下、向左、向右选择所要的项目。
Stop 用于停止执行或功能。
Ctl、Alt 主要起控制作用。
“0”到“9”和“.”用于数字资料的輸入。
+、- 用于正数负数的输入。
“JOYSTICK”(控制柄) 控制柄用于在设定及编程过程中使芯片和所测试的工作台按 XY 向移动。
在设定与操作过程中[F1] 搜索芯片。
[F2] 银浆注射器/点胶模块快捷键操作表。
[F3] 选择控制杆速度– Pitch / Low / Medium / Fast。
[F4] 选择检查摄相机– Wafer / Epoxy / Bond。
[F5] 迭式载具模块快捷键操作表。
[F6] 输入升降台模块快捷键操作表。
[F7] 焊头模块快捷键操作表。
[F8] 工件台模块快捷键操作表。
[F9] 输出升降台模块快捷键操作表。
[F10] 硅片工作台模块快捷键操作表。
[F11] 焊接光学模块快捷键操作表。
[F12] 从 AD830 控制软件退出。
二、安全操作注意事项1、所需的工作环境应在使用者操作机器和进行维修保养时,特别是在遇紧急情况下可自由移动。
电源开关、马达开关或紧急开关必须保持畅通。
所有的开关必须随时可轻易开启或关闭;2、确认仪器设备的要求,检查电压,电流及空气压力是否符合机器规格;3、门与机盖必须关上并上锁,仅有在必要时才能将门打开,任何时候接地线必须是牢固的,以防止电气带来的危害,避免发生电意外;4、使用者在操作机器前必须接受训练。
LED自动固晶基本操作一、 LED自动固晶所需工具A809V自动固晶机一台、显微镜一台。
二、实验目的掌握A809V自动固晶机的基本操作以及对LED产品的认识三、操作过程开机先开电源后开马达关机先关马达后关电源上班的准本工作:填写点胶头记录保养表,洗点胶头、洗吸嘴、洗胶盘、对顶针、开离子风扇固晶的原材料:支架,晶片、银胶或绝缘胶一条支架=20点,1K=1000点,1K=50条,1条=0.02K注意:操作机台时,不确定其功能情况下不呀按“确定”。
MODE(主功能键) FNT(副功能键)FNT 1 推支架2 手动点胶3 清除轨道4 洗吸嘴5 料盒移一格6 料盒复位MODE 0 返回到自动模式1. 对顶针:MODE 1项 2项 2项确定(ENTRE)2. 洗点胶头:MODE 5项输入73 确定到DSRY(按8下ENTER)按两下上键或下键3. 洗胶盘:MODE 5项输入12 上键或下键4. 胶盘转动:MODE 5项输入13 确定上键5. 找晶片:STOP 找到晶片的第一个点开始打6. 换晶片:STOP FIN 4 放好晶片转换屏幕按两下STOP7. 看数量:MODE 3项 4项确定8. 删数量:MODE 3项 5项将NO该为YES(用下键改,两次)确定9. 做PR:MODE 1项 4项确定找到一个晶片,将光标中心对准晶片中心确定,再将光标对准晶片point 1 确定,然后将光标对准晶片的point 2 确定,一直不停的按确到PR做好为止。
10. 测间距:将光标放到屏幕四周都有晶片的位置,并且光标中心在晶片上 MODE 1项 3项3项确定等机器自动测完间距再按确定11. 调感应器:MODE 一项确定 5项用上下键和旋转感应器旋钮至红色LED显示至亮与不亮之间12. 设1K个点:MODE 2项 5项输入1000 确定13. 固了半条支架补剩下的点:关掉6项,推支架(FNT 1),已固几个点就按几下1,再打开第6项,MODE 014. 设数量固晶:MODE 2项 3项要设多少就设多少确定15. 吸嘴与晶片高度:MODE 1项 1项 1项16. 吸嘴与固晶高度:MODE 1项 1项 2项17. 点胶与碗杯高度:MODE 5项输入73 确定到DBDZ 按下键上升,上键下降18. 过支架:关掉6项,输入70确定到IL前钩爪(15点)OL后钩爪(5点)四、分析不良品的影响及原因固晶不良品的常见现象粘胶:胶水沾到晶片表面后电极影响:1.焊不上线2.电极无法导通原因:1原材料粘胶2.漏固,吸嘴粘胶电极氧化污染:影响:1.吸嘴吸不起来晶片2.焊不上线3.影响推力残金原因:1.原材料氧化2.存储环境潮湿氧化3.存放时间过久氧化少胶:低于要求胶量的高度(<1/3)影响:1.焊线掉片2.银胶脱落3.晶片推力不足原因:1.机台参数设置不当2.胶盘内胶水不足3.机器不稳定多胶:胶水超过PN结影响:1.漏电2.若沾到表面则影响焊线原因:1.机台参数设置不当2.胶盘内胶水过多3.机器不稳定4.胶盘没装好固晶不正:固晶后的晶片位置偏离碗杯5mil(1/2个晶片宽度)以上影响:1.影响焊线PR识别2.影响成品光斑、亮度3.晶片粘胶、漏电原因:1.支架定位不准2.PR识别不准3.机台参数设置不当4.机器不稳定银胶扩散:影响:1.影响焊线2.晶片与支架接合力不佳,银胶脱离原因:1.支架原材料电镀异常2.胶水原材料异常3.之家污染4.在空气中暴露时间过长漏固:未点胶或点胶未固晶影响:1.焊线停机2.死灯原因:1.PR识别不准2.吸嘴吸晶故障3.人为造成4.吸嘴碰到标签纸支架污染:影响:1.焊不上线2.焊不沾原因:1.手碰到支架2.人为污染3.来料污染支架变形:影响:1.固晶位置偏移2.影响焊线3.短路原因:1.机台压错位2.人为造成3.来料异常掉晶:有固晶的痕迹而无晶片影响:死灯原因:1.固晶胶量不足2.胶水未烤干3.焊线参数过大爬胶:影响:1.死灯、漏电2.影响焊线原因:1.吸嘴粘胶2.晶片爬胶3.点胶不均悬浮:影响:1.晶片推力不足2.掉片死灯原因:1.机台参数不当2.支架高矮不一倒晶、竖晶:影响:1.影响焊线2.死灯原因:1.吸嘴气压不足2.吸嘴污染3.晶片污染叠晶、双晶:影响:1.死灯2.影响焊线及导电性原因:1.机台参数设置不当 2.晶片异常晶片固反:影响:1.影响焊线PR识别2.正负极焊反原因:1.晶片位置法放错2.机台参数设置不当3.上支架时支架放反晶片破损:影响:1.要求晶片100%不能破损2.影响电极参数原因:1.吸嘴压伤2.晶片来料异常电极刮伤:影响:1.漏电2.影响焊线PR识别3.影响金球与电极结合原因:1.吸嘴压伤2.晶片上线前异常五、注意事项1.作业时要配戴静电手套、静电环。
AD809A-03自动固晶机操作规程一、目的为了使操作者能安全地使用本设备,保证此设备良好运行,以保证公司产品的品质达到要求,符合公司的质量体系要求。
二、适用范围适用于公司内AD809-03系列机器。
三、方法1.1开机1.1.1 先按电源开关ON,待屏幕显示“ASM”移动字幕,再按马达开关ON,机器起动直至显示设置菜单(Set Up Mode)。
1.1.2 打开气源。
1.1.3 上银胶。
1.2操作1.2.1 做三点一线:在设置菜单中1.Set Up Mode用“ADV RTD”键选择其中的1.1(Bondarm)和1.2(Eject),调整三点一线——吸嘴、摄像头、顶针在一条线上。
1.2.2 上晶片:按Mode键,屏幕显示0-5主菜单,选择0(Auto Bond——自动固晶模式),后选0.3(New Wafer——新的晶片环),换上新的晶片环,按STOP。
1.2.3 做PR:选择自动菜单中的0.7(PR System——图像识别系统)或在设置菜单中选择1.4(PR System),做晶片图像识别。
1.2.4 在左边的料仓内放上适量的支架。
1.2.5 在右边的上下层升降台上放上两个料盒。
1.2.6 机器调整:1.2.6.1 分片:在自动菜单下按FIN(功能键),按0(Load LF-分片)。
1.2.6.2 步进:在上一步的状态下,按1(Index-步进)。
1.2.6.3 单颗固晶。
1.2.6.3.1 按STOP键返回自动菜单功能,进入0.1(Single bond-单颗固晶),进行单颗固晶。
1.2.6.3.2 在单颗固晶之前,首先按一下CAMEAR/SEL键(图像显示)出现晶片图像,拔动手柄,使十字线对准初始位置的第一颗晶片,便于有秩序的固晶。
1.2.6.3.3 移动十字线的速度可通过JOYSTK/SPEED 键来实现其快慢调节。
1.2.6.3.4 机器寻找晶片的方向可通过四个键来改变(←6 8→ 7↑ 4↓)。
AD860全自动固晶机操作规程第一章总则为确保AD860全自动固晶机的安全运行和产品质量,制定本操作规程。
本规程适用于厂内AD860全自动固晶机的操作人员。
第二章操作前的准备工作2.1检查设备的运行状态,确认设备处于正常工作状态。
2.2检查设备的供电线路,确保电源正常,并按照规定接地。
2.3检查设备的工作环境,确保周围环境干燥、无尘、无腐蚀性气体,温度适宜。
2.4检查设备的工作台面,确保表面平整,无杂物。
2.5检查设备上的刀具和夹具,确保刀具锐利,夹具牢固。
第三章操作流程3.1打开设备电源,待设备启动完成后进入操作界面。
3.2选择适合的程序,点击“开始”按钮,开始设备的自动运行。
操作人员应立即退到安全区域等待设备完成。
3.3检查设备的运行状态,注意观察设备的操作过程,确保固晶过程顺利进行。
3.4根据固晶产品的要求,调整设备的参数,例如温度、压力等。
3.5监控设备的运行情况,及时处理设备出现的异常情况,如报警、挤压不均匀等。
3.6当设备完成固晶过程后,设备将自动停止运行。
操作人员应确认固晶结果是否符合要求。
第四章操作要点4.1操作时,操作人员应穿戴符合要求的工作服、手套、安全鞋等个人防护装备。
4.2在固晶产品表面接触时,应使用清洁、无油污的工具,避免污染产品表面。
4.3操作人员离开操作区域时,应将设备设为暂停状态或关闭设备电源。
4.4若发现设备出现异常情况或故障,操作人员应立即停止设备运行,并向维修人员报告。
第五章安全注意事项5.1禁止未经培训的人员操作设备。
5.2禁止将手指、头发等物体靠近设备运动部件。
避免发生意外伤害。
5.3禁止吸烟、饮食等行为,严禁在工作区内进行非工作相关活动。
5.4严禁在设备运行中擅自调整参数、清洁设备或触摸设备内部部件。
5.5使用设备过程中,应遵守设备使用规范,不得滥用设备或进行不适当的操作。
第六章紧急情况处理6.1发生设备异常情况时,操作人员应立即停止设备运行,并按照应急处理程序处理。
固晶机操作流程1. 贴片:1.1 确定贴片数量和封装类型并将其记录在固晶机上;1.2 打开机器外壳,清理工作空间,并将视频检查装置设置在适当位置;1.3 将PCB板放在工作台上,并确保它的位置正确;1.4 将胶水或者粘合剂放在PCB板的贴片区域上,并确保覆盖整个贴片区域;1.5 将贴片放在胶水或粘合剂上,并压住贴片,确保其粘牢;1.6 根据机器上的设定,将贴片加热至其粘牢不会脱落。
2. 打开固晶机:2.1 确保固晶机外壳和所有的启动按钮都已关闭;2.2 检查进料系统,并将其适当配置;2.3 检查电源线和网线,将其都插上;2.4 打开外壳,将视频检查装置放在适当的位置上;2.5 确认机器能够正常运行并进行下一步操作。
3. 加热:3.1 将PCB板放在机器上,并打开灯管加热系统;3.2 处理好工作环境,在机器运作时不要靠近;3.3 等待热塑料或胶晶发热至所需温度,并保持在该温度下一段时间,然后加热结束。
4. 准备上料:4.1 准备好芯片,封装和其他物品,并将它们放在操作区;4.2 关闭进料系统,并检查是否已准备好安装的位置;4.3 确定芯片的方向,将芯片放在正确的位置处;4.4 确定每个封装的方向,并确定其放置的位置。
5. 安装芯片和封装:5.1 开启进料系统;5.2 通过进料系统安装芯片和封装至其相应位置,并将其定位;5.3 通过定位系统以确保每个芯片和封装的正确位置,并确保封装不会偏移。
6. 固化:6.1 将PCB板移出机器;6.2 转移至UV和红外灯的作用区域以进行硬化;6.3 确保PCB板完全固化后,将其从固晶机中取出;6.4 检查PCB板以确保质量且修复任何损坏。
7. 完成:7.1 将贴片的数量,封装和其他相关信息记录在工作单上;7.2 若有其他任务,则在完成当前任务前完成它们;7.3 关闭机器的所有运行系统,并将其重新容纳。
厦门华联电子有限公司光电事业部@分厂AD8930自动固晶机操作指导书拟制:审核:批准:会签:发布日期:2011-11-01 实施日期:2011-11-01本文件属厦门华联电子有限公司所有任何组织不得以未授权的方式使用本文件目录1. 设备介绍………………………………………………………………………………(3-4)2. 安全操作注意事项 (4)3. 开关机步骤……………………………………………………………………………(5-6)4. 操作键盘及菜单各功能按钮介绍 (6)5. 一般设定及编程步骤…………………………………………………………………(6-9)6. 基本操作设定 (9)6.1 吸嘴更换 (10)6.2 顶针更换 (10)6.3 银胶更换 (11)6.4 芯片更换 (11)6.5 抓晶、固晶三点一线调节………………………………………………………(12-13)6.6 左右升降台参数设定……………………………………………………………(13-14)6.7 点胶光学校正…………………………………………………………………(14-15)6.8 装片光学校正…………………………………………………………………(15-16)6.9 芯片PR设定……………………………………………………………………(16-18)6.10芯片设定………………………………………………………………………(18-19)7. 自动焊接………………………………………………………………………………(19-21)AD8930自动固晶机操作指导书1设备介绍1.1设备外观见如下图1。
键盘组件三色灯塔双显示器电源开关紧停按钮图1 AD8930设备全貌1.2 AD8930 晶片焊机可以分为4 个功能组,每个功能组都由数个执行特定的任务的组件所构成,如下列装配编组表1所示。
表1 AD8930装配编排表AD8930 机器是对支架进行全自动晶片焊接的綜合系统,设计流程是: 在输入模组中有含接收支架的导轨,把支架选取并放入移位导轨中,再把银浆分配到支架的每个单元,从芯片选取晶片并把它粘贴到支架上,然后再把焊接好的支架卸载到输出升降台台等待的料盒中。

自动固晶机操作说明书文件编号 CXC-EB-021 深圳市创信彩光电科技有限公司版本 B页次第1页/共2页作业文件自动固晶机操作说明书拟定日期 2010/5/24 每次开机进入软件界面,必须进行系统复位,以用来检查机台上所有的马达是否回到原位,才能正常工作。
自动加工系统:分为连续加工和单步加工连续加工:?开点胶,?开固晶,?开送料,?开找晶,?开吸嘴检测(说明:上面5个都打“?”,然后单击开始键可自动连续加工材料) 单步加工:?开始,?单步点胶,?单步固晶,?单步找晶,?单步吸晶,?吸嘴吹气,?胶杯旋转,?单步进料,?清除轨道(说明:以上每个菜单单击一下就可以单次运行)一、调试步骤PR学习因每种晶片的反射光线强度、大小、间距不一样,所以每次更换芯片时有必要进行PR学习才可以。
PR设置步骤:第一步把晶片的亮度、对比度调至晶片与蓝膜清晰辨认,再用摇杆把晶片移动到十字光标中心。
第二步调节寻找单颗晶片范围大小,把其方框调到和晶片一样大即可。
第三步调节PR精度,根据晶片反光度和清晰度来选择PR精度大小。
取晶路径设置首先把晶片移动到十字光标中心,用鼠标单击开始自动教导系统会自动完成取晶路径。
三点校正何为三点校正:就是把吸晶镜头、吸晶点和顶针连成一线的调节过程以及把固晶镜头、固晶点和支架杯底中心连成一线的调节总称首先点击操作界面位置调节按键系统弹出轴位置设定菜单,然后在设定轴处点击摆臂旋转找到吸晶位点击,再点击摆臂上下找到吸晶高度点击。
其次把吸嘴帽拆下,调节吸晶镜头的十字架在吸嘴反光点的中心。
最后,把摆臂旋转到吹气位,用侧灯照亮顶针帽,点击设定轴的顶针然后点击工作高度在视图区找到顶针的针尖后,调节顶针座使针尖在十字架的中心。
吸晶高度摆臂高度在吸晶位和固晶位不同,首先调节吸晶位的高度1)把晶片移动到镜头的中心用真空吸住蓝膜2)先在设定轴处点击摆臂旋转点击吸晶位,然后在设定轴处点击摆臂上下找到吸晶位点击,通过点击“,”、“,”使吸嘴轻贴在晶片表面再点击修改。
LED固晶机操作指导书1.目的.以正确的操作来保证产品质量和设备的使用寿命.2.适用范围:自动固晶机(AD860)操作3.操作方法与步骤:3.1.系统启动3. 1.1打开设备前置气阀开关至〃On〃状态,之后再打开电源开关至〃On〃状态(详见图一步骤).3.2 取胶点胶步骤一1.连接主电源2.开启电源3.连接压缩气步骤二1.关闭EMO按钮2.按下绿色按钮开启电源步骤三1 .开启气步骤四双击Di eBonder v图标步骤五硬体和影像识别系统初始化后,选择“暖启动”开机;双击“暖开机”图标I i度须在点胶头页面设定(如图二)IJ好接触到呵舟市而叫位置。
盗艮胶点图传图一暖开机3. 3设定晶片工作台的极限(有两种晶片工作台极限类型:1.圆形(本指导书以此为例进行说明);2. 多边形)步骤(如图三): 圆形极限设定步骤:1).点击“工作台极限类型”为圆形;2) ,点击“开始教读极限”按钮;3) .根据荧幕指示执行(步 骤1 >步骤2 >步骤3 ); 4) ,点击”确定新的极限位置”按钮。
晶片工作台^定晶片3・4焊头/顶针器设定步骤(如图四):1) .在晶片或PCB 上放一个反射镜以将吸嘴孔图像反射到晶片或固晶摄像机。
2) .松开固定吸嘴帽的螺丝,拆除嘴帽。
3) .点击“取晶位置”或“固晶位置,4) .点击“单步计数。
输入每次移动量的步数,点击“ + ”和“-”进行调节。
5) .将吸嘴帽装回,并收紧吸嘴帽下的固定螺丝。
6) .点击“确定”来确定。
图三ADBC0M4TO—入值10包・“•・MJT♦・*“0冏始衿^槿国身|示程型工作台校限8844修定新的今r 工作台趣限-晶片中心x .S 反黑f 盟□一 •撮臂r瓶曾位置演雀取品3. 5顶针设定步骤(如图五) 1) .点击红色框内选项之高度。
2) .点击“单步记数”输入每次移动的步数,点击“ + ” & ”进行调节。
3) ,点击“确定”来确定值。
1.0 操作流程及相关规定1.1 开机1.1.1 打开气、电源开关(气压4-6Kg/cm2,电压220VAC);1.1.2 依次打开主电源、马达、显示器;1.1.3 机台自检完成后(约2分钟),自动进入待机状态。
1.2 机台调校8.2.1 卸装胶盘:8.2.1.1 按F9,选择Home Epoxy,移出点胶头;8.2.1.2 点胶头移开后,进行胶盘装卸操作;8.2.1.3 按STOP使点胶头复位,结束操作。
操作注意事项:1. 胶盘要与机台上的定位销配合好,胶盘放平。
8.2.2 更换芯片环:8.2.2.1 进入AUTO菜单,按F7移出焊臂,更换新的芯片环;8.2.2.2 锁紧芯片环,先按Shit键,再按F6,焊臂移回,结束操作。
操作注意事项:1. 芯片要放正,向下压紧。
2. 正负极方向不能放反。
正极朝右,负极朝左。
8.2.3 光点(三点一线)校正:8.2.3.1 松开吸咀帽;8.2.3.2 进入SETUP菜单,选择0 Process setup→1 Bonding Process→0Bond Head Setup→7 Pick Die Level;8.2.3.3 放置反光片于吸嘴下,取下吸嘴帽;8.2.3.4 按F4键,将屏幕切换到WAFER画面;8.2.3.5 用镜头的X,Y向调整钮将十字线与光点对正,对正后锁紧;按STOP键使焊臂复位。
8.2.3.6 盖上吸咀帽,取出反光片,锁紧吸嘴帽;8.2.3.7 在SETUP菜单下,选择0 Process setup→1 Bonding Process→1Ejector Setup→2 Ejector Up Level,将顶针升起用顶针XY调整钮调整顶针光点与十字线对正;8.2.3.8 按STOP键使顶针复位,校正完成。
操作注意事项:1. 顶针调整钮在顶针座底部,调整后锁紧。
8.2.4 芯片PR的设定8.2.4.1 用操作杆移动芯片环,使显示器至少显示9颗芯片,再用十字光标对准中心那颗晶片。
⾃动固晶机(AD809-03)操作指南⾃动固晶机(AD809-03)培训教材编写刘永刚培训⽬的:让设备操作⼈员掌握正确的设备操作⽅法,以提升产品质量及⽣产效率。
培训对象:⾃动固晶机操作⼈员。
培训设备型号:AD809-03培训内容:⼀、开机:1.打开⽓、电源(⽓压4-6Kg/cm2,电压220VAC);2.依次打开主电源、马达、显⽰器、摄像机开关;3.机台⾃检完成后(约2分钟),⾃动进⼊待机状态.⼆、机台调校1.装卸银胶⿎:1.1 按MODE键进⼊主菜单,选择WHPAR,按ENTER键→12 →ENTER ,显⽰DISPEN,按上键(ADV)两次;1.2 点胶头移开后,进⾏银胶⿎装卸操作;1.3 按ENTER使点胶头复位,结束操作.2.更换晶⽚环:2.1 按MODE键进⼊AUTO菜单,选择NEW WAFER,按ENTER;2.2 焊臂移开后,更换新的晶⽚环;2.3 锁紧晶⽚环,按ENTER键,结束操作.3.死位的调整(PICK POSN及BOND POSN):3.1 松开吸咀帽;3.2 在SET UP菜单下,选择BOND ARM,再选PICK POSN,将反光⽚放在吸咀下,在屏幕上选⼀参照点,按ADV键,两次经过参照点的数值(对值)相加除以2,所得的数值,即为死位值;3.3 将PICK POSN死位的数值加上667,即为BOND POSN的死位值.4.光点(三点⼀线)校正:4.1 松开吸咀帽;4.2 按MODE键,选择SETUP →ENTER →BONDHEAD →PICKLEVEL;4.3 放置放光⽚于吸咀下,取下吸咀帽;4.4 按CAMERA SET键,将屏幕切换到WAFER画⾯;4.5 ⽤镜头的XY向调整钮将⼗字线与光点对正;4.6 盖上吸咀帽,按FNT#键,将焊臂复位,取出反光⽚,锁紧吸咀帽;4.7 选SETUP菜单,选择EJECTOR →EJECTOR UP LEVEL,将顶针升起⽤顶针XY调整钮调整顶针光点与⼗字线对正;4.8 按FNT#键,将顶针复位.5.步进调整:5.1 确定固晶位置,在此处绘制电极参考框,作为步进调校之标准点5.2 按MODE键,选择WHPAR→70→ENTER,直⾄出现IO=**;5.3 将固晶压头Y叉抬起并锁定;5.4 送⼀条⽀架到STOPPER位后,按ADV使勾⽖复位5.5 按ENTER键,显⽰IL=**,按ADV&RTD,使勾⽖压下时刚好在第⼋颗位置的两脚之间;5.6⼿动将第⼋颗位置送⾄固晶压头Y叉位,按ENTER,显⽰OL=**,按ADV&RTD使勾⽖压下时刚好在第⼀颗位置的两脚之间;5.7按ENTER键⾄出现WHPAR,按MODE返回主菜单.此之调校为WH70项调整,即粗调,后要调校WH72项参数5.8 ⾃动送⼊⼀条⽀架,观察其位置5.9 固晶位置X⽅向偏移按MODE键,选择WHPAR→72→ENTER此参数中 XBD控制⽀架前6颗偏移,按ADV&RTD调整。
修 订 履 历批准审核编制刘平安编制部门工程部项次 版本 文件申请单序号更 改 内 容 生效日期 11.0新版申请发行2013-4-2221.1增加支架进出烤记录、固晶材料进出烤记录,晶片耗损记录、芯片纸的编号与张贴与表单的存档。
首检定义2013-6-20 3 1.2 新增吸嘴使用寿命、固晶出现的不良图示2014-08-081.0目的为了使产线作业人员有正确的固晶作业程序依据。
2.0范围适用于LED LAMP系列产品的自动固晶工艺制程。
3.0作业机台及物料1. 扩晶机2. 自动固晶机3显微镜 4. 支架5. 银胶/绝缘胶6. 芯片7. 镊子8.烤箱4.0权责4.1工程部负责该文件的制定、修改与完善。
4.2生产部负责该文件的执行与实施。
4.3品管部依照此文件督促产线作业人员的执行。
5.0作业内容5.1备料:作业前仔细核对要投产的物料型号性能参数与该《生产指令单》所对应的原材料是否吻合(支架,芯片,绝缘胶/银胶等。
)并将该单所用的多张芯片标签纸依流水码编号。
5.2开机、机器设定5.2.1连接自动固晶机电源(220V、50HZ),气源(4-6Kg/c㎡)。
5.2.2备胶:参照《固晶胶使用规范》。
5.2.3支架烘烤:支架在使用前须做支架烘烤,烘烤条件:150±10℃/1h并记录于《支架进出烤记录表》。
烘烤完的支架需在24H内使用完成。
5.2.4每班至少对烤箱做一次温度测试并记录于《烤箱温度记录表》。
5.2.5核对型号并检查芯片后扩晶,具体操作见《扩晶作业规范》,将其装在工作台上。
5.2.6调试机台时需做好首件检查并记录。
5.2.7核对型号并检查支架后放于送料架上。
5.2.8机台调试OK后开始固晶。
5.2.9作业员在开机、调机、换材料等机台停顿后重新开始的情况下,须对所固的材料进行首检并做记录。
5.2.10在固晶过程中,作业员随时查看荧幕上的视像和固好的产品,发现问题及时调整。
5.2.11晶粒必须处于支架碗中心,其偏移量不得超过晶粒边长的1/2。
AD860自动固晶机操作指导书1. 对三点一线(镜头.吸嘴.顶针.):首先选择一颗芯片,用鼠标选择设定→焊头与顶针→焊头→卸下吸嘴帽→吸晶高度→按鼠标左键→看镜头、吸嘴、顶针中心点是否在十字架同一直线上,调整完成后,装上吸嘴帽。
2. 做PR及测间距:进入设定→点击选择晶片→放如扩好的晶片→点击开始教读→灯光调整后→点击下一页→使用滑鼠选择晶片框大小→点击确认→选择教读→选是开始自动校正→自动测间距→搜寻范围→要按照晶片大小来调整,即完成。
3. 吸晶与固晶高度调整:进入设定→选择焊头/顶针→点击焊头→吸晶高度→点击自动→自动完成后再加10~20个数字,即完成。
进入设定→选择焊头/顶针→点击焊头→固晶高度→点击自动→自动完成后再加10~20个数字,即完成。
4. 调整顶真高度:进入设定→选择焊头/顶针→点击顶针→顶针上升高度→点击+—调整→按上下键观察顶针高度,取一个蓝光双电极芯片高度,且顶针要与十字线重合,即完成。
5.上胶与胶量调整:将胶盘锁紧螺丝,进入设定→点击点胶→选择预备点胶将点胶臂摆出胶盘,加胶进胶盘后调好刮胶厚度,返回→选择点胶头→吸胶高度→上下键观察点胶针接触胶盘底部后再加1~10个数字,即完成取胶设定。
返回→选择点胶头→点胶高度→上下键观察点胶针接触胶盘底部后再加1~10个数字,即完成取胶设定。
6.支架/PCB编程:进入设定→点击料架设定→料架编号→选择1→移到第一个料架PCB第一个点移到镜头下→点击确定→选择2→第2个料架PCB第一个点移到镜头下→点击确定,即完成。
进入设定→点击PCB设定→设定模式→矩阵→输入一个料架上有几块PCB→2行→2列→然后用摇杆→移到第一个料架上PCB的左上角→确定→第二点移到第二块PCB的左上角→第三点移到第三块PCB的左上角→点击接受→教读对点→对点数量→对两个点→对一小块 PCB 的对角→开始教读→灯光调整→开始校正→教读对点完成。
→搜寻范围→要按照对点图形来调整。
自动固晶机操作规程AD830自动固晶机发放号码:受控状态:一、设备介绍三色灯塔显示器进料处点胶、芯片台、固晶系统开关各控制板系统3.1.20、点击“Confirm”按钮继续;3.1.21、接下来利用控制杆调节输出传送器位置使其刚好与传送孔相匹配;3.1.22、用鼠标点击输出传送器的“↑↓”箭头键测试传送销位置是否合适;3.1.23、点击“Confirm”按钮继续;3.1.24、输出传送销会向下移动并把支架传送进料盒;3.1.25、用鼠标点击输出传送器的“↑/↓”箭头键测试传送销位置是合适;3.1.26、点击“Confirm”按钮继续。
3.1.27、输出传送销会向下移动并把支架传送进料盒。
3.2、材料控制器设定3.2.1、叠式载料模具设定3.2.1.1、把一料盒支架放在式叠载料模具平台上;3.2.1.2、选择“tack loader”操作表;3.2.1.3、选择“Pick LF Position”;3.2.1.4、利用控制杆调节吸头 Y 位置使其与平台上的支架校准;3.2.1.5、调节叠式载料模具吸嘴光纤传感器灵敏度使支架靠近光纤传感器时 LED 灯为“On”;3.2.1.6、把“Z contact drive up distance”设定为零;3.2.1.7、点击“Contact search test”按钮;3.2.1.8、平台会上升直到顶部的支架被光纤传感器感应;3.2.1.9、若有必要可在“Z contact drive up distance”中插入一个数值使吸嘴在重新尝试“Contactsearch test”时可以拾取支架;3.2.1.10、在输入导轨上放置支架;3.2.1.11、通过选择“Drop LF Position”使吸头与输入导轨上的支架校准;3.2.1.12、按“F5”并选择“Pick LF from Carrier”;3.2.1.13、选择“Drop LF On Track”检查校准。
3.2.2、输出升降台调节3.2.2.1、选择“Output Elevator Setup”操作表;3.2.2.2、选择“Load Position Z”利用控制杆调节装载料盒的升降台高度。
“F3”可用于改变增加步距。
点击“Confirm”确;(图3.2.2.2-1)(图3.2.2.2-2)图3.2.2.2-1 图3.2.2.2-23.2.2.3、对“Load Position Y’, ‘Unload Position Z”和“Unload Position Y”作同样调节;3.2.2.4、在输出导轨上放置支架;3.2.2.5、按“F9”并选择“Change Magazine”然后按“Enter”把料盒装载到升降台上;3.2.2.6、交替调节“First Slot Position Z”和“FirstSlot Position Y”直到输出导轨上的支架可平滑地插入料盒;图3.2.2.7 图3.2.2.83.2.2.7、转到“Diagnosis”操作表,然后在“Outputelevator”操作表中选定“Elevator To Slot”输入最后料槽数并按“Enter”确认;(3.2.2.7)3.2.2.8、检查最后料槽与工件台输出导轨是否对准;(图3.2.2.8)3.2.2.9、若未对准,应检查“Magazine Setup”操作表中的“Slot pitch”,然后再次执行料槽位置校准。
3.3、点胶设定3.3.1工作台光学校准(图3.31)3.3.1.1、选择“dispensing process”操作表,然后转到“Opt align”子操作表;3.3.1.2、点击“Epoxy upper”的数值框;3.3.1.3、然后点击“yes”使用自动搜索寻找z高度。
点胶器会向下移动并搜索Z高度;3.3.1.4、点胶器会点胶一次,然后用户可以利用控制杆移动十字准线直到它处于银浆点中心。
图3.3.1 图3.3.23.3.2、编写点胶圆点(图3.3.2)3.3.2.1、进入“SETUP”操作表;3.3.2.2、转到“Dispensing Process”操作表;3.3.3.3、进入“Pos”子操作表;3.3.3.4、在输入导轨上放置支架;3.3.3.5、点击“transfer LF”按钮,并按“yes”确定;3.3.3.6、支架会被自动传送使第1单元处于点胶位置;3.3.3.7、点击“Load PR”按钮;3.3.3.8、在屏幕显示的照明控制面板上调节灯光强度;3.3.3.9、移动十字准线到模板的左上位置;3.3.3.10、按“Confirm”按钮然后移动十字准线到模板的右下位置。
按“Confirm”确认;3.3.3.11、点击“Align Epx Point”按钮;3.3.3.12、通过控制杆移动十字准线到点胶位置并按“Confirm”确认。
3.3.3、点胶压力检查3.3.3.1、进入“Setup”操作表。
3.3.3.2、转到“Bonding Process”操作表。
3.3.3.3、进入“Delay”子操作表。
3.3.3.4、在“Alarm Checking”中,使“DispensingPressure Checking”转为“On”;(图3.3.3.4)图3.3.3.4 图3.3.3.53.3.3.5、在压力传感器上调节点胶压力的上限位和下限位。
按下压力传感器中间的“Set”输入“P1”和“P2”。
(“P1”表示下限位,“P2”代表上限位)(图3.3.3.5)3.3.4、点胶延迟设定(图3.3.4)3.3.4.1、进入“Setup”操作表;3.3.4.2、转到“Dispensing Process”操作表;3.3.4.3、进入“Delay”子操作表;3.3.4.4、可在此操作表中调节延迟。
图3.3.43.4、芯片拾取和焊接设定(焊头和推顶器设定)3.4.1、预拾取和预焊接位置设定(图3.4.1)3.4.1.1、选择“Bonding process”操作表,然后转到“Opt align”子操作表;3.4.1.2、点击“Pre Pick Position”的“value box”;3.4.1.3、调节“PrPick Position”,使其靠近拾取芯片位置但不阻挡吸取芯片的摄像头;3.4.1.4、点击“Pre Bond Position”的“value box”;3.4.1.5、调节“Pre Bond Position”,使其靠近焊接芯片位置但不阻挡固晶的摄像头。
图3.4.1 图3.4.23.4.2、工件台位置的吸嘴光学校准(图2.4.2)3.4.2.1、选择“Bonding process”操作表,然后进入“Opt align”子操作表;3.4.2.2、拆除焊臂顶端的漏晶探测器,稍后可看见透光孔;3.4.2.3、把金属反光板放在固晶座上使吸嘴孔图像反射到固晶摄相机内;3.4.2.4、点击“Bond position (upper)”的数值框,然后焊臂会转到固晶侧;3.4.2.5、点击“Bond head Z posn”按钮。
焊臂向下移动并搜索Z高度。
3.4.2.6、通过按“+/-”按钮微调Z高度使其在监视器上可看到清晰的透光孔;3.4.2.7、然后点击“Bond Optic Y posn”并通过“+/-”按钮把透光孔调节到监视器中心;3.4.2.8、若要微调监视器中心的透光孔,可利用鼠标点击“Bond head XY posn”的“+/-”按钮,若要改变步计数,可利用“step count”按钮X或Y。
必须使吸嘴孔与拾取光学摄相机的十字准线校准;3.4.2.9、用相同的办法校准“Bond position(middle)’和‘Bond position (lower)”;3.4.2.10、固晶方向总共需要 3 次光学校准。
3.4.3、芯片位置上的吸嘴、推顶针光学校准(图3.4.3)3.4.3.1、拆除芯片环/扩张器上的芯片;3.4.3.2、手动旋转XY推顶器工作台的调节旋钮使推顶针如检查监视器上显示的一样与十字准线对准;3.4.3.3、进入“SETUP”操作表;3.4.3.4、转到“Bonding process”操作表,然后进入“Opt align”子操作表;3.4.3.5、拆除焊臂顶端的漏晶探测器。
3.4.3.6、把金属反射板放置在硅片(或推顶帽)上使吸嘴孔图像反射到拾取摄相机内。
3.4.3.7、点击“Pick Position”的数值框;3.4.3.9、然后点击‘Bond head Z posn’按钮。
焊臂会向下移动并搜索Z高度;3.4.3.10、通过按“+/-”按钮微调Z高度使其在监视器上可看到清晰的吸嘴透光孔;3.4.3.11、若要微调监视器中心的透光孔,可利用鼠标点击“Bond head XY posn”的“+/-”按钮。
若要改变步数,可利用“step count”按钮 X或Y。
必须使吸嘴孔与拾取光学摄相机的十字准线校准。
图3.4.33.4.4、推顶器、拾取和焊接高度调节3.4.4.1、把芯片装到芯片扩张器上;3.4.4.2、利用控制杆移动检查监视器中心的芯片;3.4.4.3、进入“Setup”操作表;3.4.4.4、转到“Bonding process”操作表;3.4.4.5、选择“Ejector”子操作表;(图3.4.4.4)3.4.4.6、点击推顶器上升高度的数值框。
利用控制杆调节到 1800 步;3.4.4.7、检查推顶针是否与推顶帽表面同高。
通常,此值预设为默认值。
若推顶针不在推顶帽表面高度,必须按照步骤“A-C”手动调节推顶针高度。
图3.4.4.4 图3.4.4.113.4.4.8、利用控制杆调节“Ejector Up Level”使芯片推顶高度等于芯片厚度,利用显微镜进行检查;3.4.4.9、选择“Bonding process”下的“Z level”子操作表;3.4.4.10、点击拾取接触高度的数值框了;3.4.4.12、点击“Confirm”按钮确认。
3.4.4.13、若不使用自动搜索模式,固晶臂会向下移动到预设高度。
调节“Pick Die Level”使吸嘴刚好接触芯片表面,利用显微镜检查,利用控制杆快捷键改变增加步距,点击“Confirm”按钮确认。
3.4.4.14、把支架放到输入导轨上;3.4.4.15、转到“Bonding process”下“Bond pos”子操作表;(图3.4.4.15)3.4.4.16、点击“transfer LF button”,按“yes”确认,支架会被传送到工件台而且第1单元处于固晶位置;3.4.4.17、点击“Learn Z”按钮。
焊臂会下降到固晶位置并自动搜索固晶Z高度。