SEW零点设置方法
- 格式:doc
- 大小:357.00 KB
- 文档页数:6
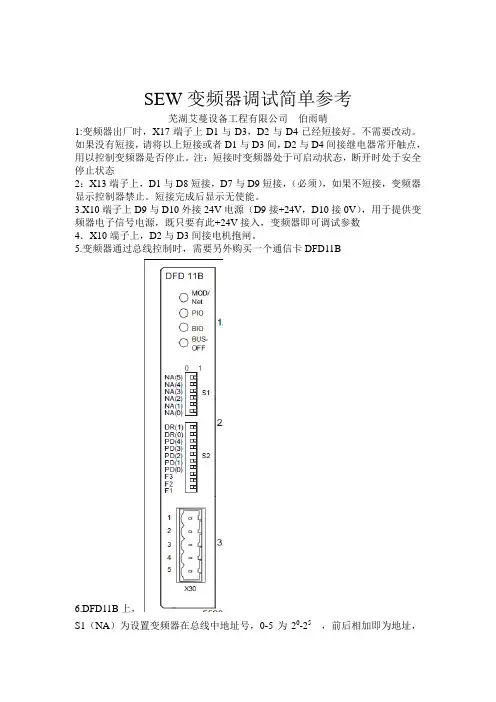
SEW变频器调试简单参考芜湖艾蔓设备工程有限公司伯雨晴1:变频器出厂时,X17端子上D1与D3,D2与D4已经短接好。
不需要改动。
如果没有短接,请将以上短接或者D1与D3间,D2与D4间接继电器常开触点,用以控制变频器是否停止。
注:短接时变频器处于可启动状态,断开时处于安全停止状态2:X13端子上,D1与D8短接,D7与D9短接,(必须),如果不短接,变频器显示控制器禁止。
短接完成后显示无使能。
3.X10端子上D9与D10外接24V电源(D9接+24V,D10接0V),用于提供变频器电子信号电源,既只要有此+24V接入,变频器即可调试参数4.X10端子上,D2与D3间接电机抱闸。
5.变频器通过总线控制时,需要另外购买一个通信卡DFD11B6.DFD11B上,S1(NA)为设置变频器在总线中地址号,0-5为20-25,前后相加即为地址,如20+21=3,那么这个变频器在总线中的地址为3#。
7. DFD11B上,S2 (DR)为设置变频器在总线中的传输频率,该频率设置必须与扫描模块上设置的频率一致,否则扫描模块将无法扫描到这个变频器。
DR0=0,DR1=0,125KBDR0=1, DR1=0,250KBDR0=0, DR1=1,500KBDR0=1, DR1=1,禁止8.DFD11B上,(PD0-4),设置与总线间传送的通道值。
计算方法与总线地址设置的计算方法相同。
此设置必须与扫描文件中下载到变频器的输入输出字节一致。
即如果在变频器拨码开关上设置4PD,那么在扫描文件里必须把该变频器的输入输出字节设置成8个字节(4×2)。
否则扫描模块将报警。
9. DFD11B上,AS,F1,F2,不做改动。
总线控制时:10.参数调试首先在操作面板上将参数初始化(如果点击轴上没有带编码器,则选择无编码器,不使用),完成后重新上电。
更改参数P100为device,P101为DEVICE。
将控制方式及控制源设成现场总线方式。

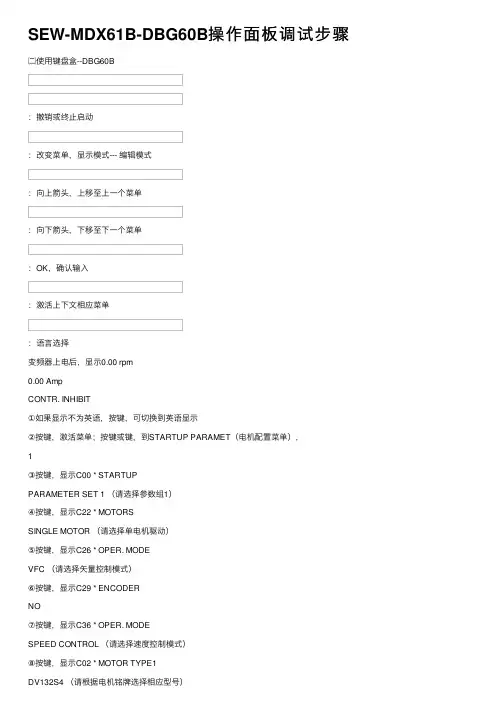
SEW-MDX61B-DBG60B操作⾯板调试步骤㈡使⽤键盘盒--DBG60B:撤销或终⽌启动:改变菜单,显⽰模式--- 编辑模式:向上箭头,上移⾄上⼀个菜单:向下箭头,下移⾄下⼀个菜单:OK,确认输⼊:激活上下⽂相应菜单:语⾔选择变频器上电后,显⽰0.00 rpm0.00 AmpCONTR. INHIBIT①如果显⽰不为英语,按键,可切换到英语显⽰②按键,激活菜单;按键或键,到STARTUP PARAMET(电机配置菜单),1③按键,显⽰C00 * STARTUPPARAMETER SET 1 (请选择参数组1)④按键,显⽰C22 * MOTORSSINGLE MOTOR (请选择单电机驱动)⑤按键,显⽰C26 * OPER. MODEVFC (请选择⽮量控制模式)⑥按键,显⽰C29 * ENCODERNO⑦按键,显⽰C36 * OPER. MODESPEED CONTROL (请选择速度控制模式)⑧按键,显⽰C02 * MOTOR TYPE1DV132S4 (请根据电机铭牌选择相应型号)⑨按键,显⽰C03 * MOT.RATED.VOLT.1 V400.00 (电机额定电压)⑩按键,显⽰C04 * MOT.RATED.FREQ.1 Hz50.00 (电机额定频率)⑾按键,显⽰C05 * MAINS.RAT.VOLT V400.00 (变频器⼊线电压)⑿按键,显⽰835 * RESP.TF—SIG VNO RESPONSE(热敏电阻监控⽆效)⒀按键,显⽰C06 * CALCULATIONYES(对上述设定参数进⾏⽮量建模运算)⒁显⽰C08 * SAVEYES(保存建模运算后的值)⒂按键,显⽰STARTUP PARAMET(电机配置菜单)⒃按键或键,到BASIC VIEW(初始化界⾯),按键,显⽰0.00 rpm0.00 AmpCONTR. INHIBIT电机配置完成。
要设定所需的运⾏参数,按键或键,即可进⼊相应的参数号进⾏设定。

SEW_零点设置方法SEW电机是一种高性能的电动机驱动系统,它广泛应用于各种工业和商业领域。
零点设置是SEW电机系统中的一项重要操作,它用于确保电机在正常运行时能够准确地回到初始位置。
本文将介绍SEW电机零点设置的方法,包括硬件和软件方面的设置。
一、硬件设置:1.确保电机系统处于关闭状态,并将电源开关关闭。
2.确认编码器连接正确,通常编码器有三个连接线:A相、B相和C 相。
将编码器的A相连接到SEW电机系统的A相输入端口,将B相和C相分别连接到对应的输入端口。
3.检查电源线是否正确连接,确保电机系统的输入端口与电源接线盒的输出端口正确连接。
4.检查电流传感器的连接,将电流传感器的信号线A和B分别连接到SEW电机系统的输入端口。
5.检查驱动器的连接,将SEW电机系统的驱动器的输入端口连接到相应的输出端口。
二、软件设置:1.打开SEW电机系统的程序,进入系统的设置界面。
2.选择零点设置选项,进入零点设置界面。
3.根据实际情况选择合适的设置参数,这些参数通常包括零点位置、零点速度和零点加速度等。
确保这些参数能够满足系统的需求。
4.设置完参数后,保存设置并退出零点设置界面。
5.重新启动电机系统,并进行测试运行。
在进行SEW电机系统的零点设置时,需要注意以下几点:1.系统的零点位置是电机在关闭状态下的位置,应该是一个固定的位置。
确保零点位置的设定准确无误。
2.零点速度是电机在回到零点位置时的速度,应该是一个较慢的速度,以确保电机能够准确地停止在零点位置。
3.零点加速度是电机在回到零点位置时的加速度,应该是一个较小的值,以确保电机能够平稳地停止在零点位置。
4.零点设置完成后,应该进行测试运行,以确保系统能够正常工作。
需要注意的是,以上的步骤和参数只是SEW电机零点设置的一般方法,具体的操作步骤和参数设置可能会因不同型号和品牌的SEW电机系统而有所差异。
因此,在进行实际操作前,应该详细阅读SEW电机系统的用户手册,并按照手册中的操作指导进行设置。
SEW变频器设置参数说明变频器是一种电能调节装置,通过改变电源频率来调节电机的运行速度。
在实际应用中,通过调节变频器的参数和设置来实现对电机的精确控制。
下面将详细介绍一些常见的变频器设置参数。
1.控制方式设置:变频器的控制方式分为开环控制和闭环控制两种。
开环控制是根据预设的转速信号直接输出频率,适用于对运行精度要求不高的场合;闭环控制则通过反馈信号来实现对电机转速的闭环控制,适用于对运行精度要求较高的场合。
根据实际需求来选择适合的控制方式。
2.转矩控制设置:转矩控制是变频器常见的一种控制方式,通过设置转矩控制参数来实现对电机输出转矩的控制。
常见的转矩控制参数包括输出电流限制、过负荷保护等,根据电机的额定功率和负载特性来设置。
3.速度控制设置:速度控制是变频器的核心功能之一,通过调节输出频率来控制电机转速。
常见的速度控制参数包括速度比例系数、加速时间、减速时间等。
根据实际应用需求来设置电机的起动时间和加减速时间,以及速度的比例系数。
4.PID参数设置:PID(比例-积分-微分)控制是一种常见的控制策略,通过设定PID 参数来实现对电机速度的闭环控制。
通常包括比例系数、积分时间和微分时间等参数。
PID参数的设置需要根据实际运行情况和系统响应特性进行调试和优化。
5.频率限制设置:频率限制是指设置变频器的输出频率范围,通常用来限制电机的最大转速和最小转速。
合理设置频率限制可以保护电机的安全运行,并延长电机的使用寿命。
6.故障保护设置:变频器具有多种故障保护功能,包括过载保护、短路保护、过热保护等。
通过设置相关参数,可以实现对电机和变频器的安全保护。
根据电机的额定功率和负载特性来设置相应的保护参数。
7.转矩控制设置:转矩控制是变频器常见的一种控制方式,通过设置转矩控制参数来实现对电机输出转矩的控制。
常见的转矩控制参数包括输出电流限制、过负荷保护等,根据电机的额定功率和负载特性来设置。
8.矢量控制设置:矢量控制是一种高级控制算法,通过运用矢量变换和磁场定向计算等方法,实现对电机磁场和转矩的精确控制。
SE-DU住友电动成型机零点调整方法一准备1:输入密码。
()2:CTRL和F2键同时按下,显示I/O检查画面。
3:I/O检查画面[零点调整][准备模式],“切”改“用”。
4:电热升温完了后,有封针装置时,请设定[射嘴开]状态下。
5:有模具的卸下模具。
6:起动马达,动转方式在[准备]下。
二射出轴的零点调整1:[准备]状态下,按[射出]键,螺杆射出到前进限(可塑化画面螺杆位置显示0。
00。
2:[射出]键按住,光标移到I/O检查画面的[零点调整]栏内[射出计量器]的右测[切]位置上,按[。
]键出现[切/用],选择[用],按[输入]键会自动变为[切] 状态。
3:[准备]状态按[松退]键,螺杆后退到后退限。
4:画面上显示螺杆实际位置等于设定最大位置加2.5MM后,现往前射5MM左右,即射出零点调整终了之后,做型开闭轴的零点调整。
三闭轴的零点调整1:准备状态[型闭]键按下,可动板到前进限状态。
2:到达前进限后,[型闭]键一直按住,光标移到I/O检查画面的[零点调整],栏内的[开闭模计测]的右侧[切],然后按[。
]键盘选择[用],按[输入]键盘自动变回[切]。
3:[准备]状态[型开]键按下,可动板到后退限状态。
4:型开实际位置等于型开限设定最大限加2。
5MM,即型开闭轴零点调整终了。
四模厚的零点调整1:准备状态[模厚后退]键按下,模厚后退到最大(即后退到后退限)2:[模厚后退]键按住,光标移到I/O检查画面的[零点调整]栏内[模厚计测]的右测[切]位置上,按[。
]键出现[切/用],选择[用],按[输入]键会自动变为[切] 状态。
3:[准备]状态按[模厚前进]键,模厚前进到前进限,再后退5MM左右,即模厚零点调整终了。
五 EJ的零点调整1:[准备]状态下,按[顶针回位]键,顶针后退到后退限(开闭模画面顶针位置显示0.00)2:[顶针回位]键按住,光标移到I/O检查画面的[零点调整]栏内[EJ计测]的右测[切]位置上,按[。
1.变频器调试步骤:所用软件为M O V I T O O L S设置网关DP地址,然后短接所有变频器的DI01与24VIO端子,然后变频器与PC通信,点扫描,扫描出设备后下载变频器启动信息,即parameter1设置控制方式为VF,根据实际情况设置电机型号,然后修改参数,如P100设为SBUS/Fixed,P101设为SBUS,P600等设为NO FUNCTION,P881设为1,其他变频器也是这样,只是修改一下P881系统总线的地址的数值;然后网关与PC 通信,扫描出与网关通信的所有变频器,然后知道变频器与PLC通信的所用的外设地址,最后把最后一个变频器的S1和S2接通,其余变频器的S1与S2断开,最后在通电状态下把AS接通切记是在所有变频器的S1与S2设置正确的前提下;伺服调试步骤:所用软件为MT_Manger设置伺服DP地址,然后断开DIOO与24VIO,接通DI01与24VIO,同时接通7与9端子,然后软件与伺服通信,通信波特率为57.6,型号为MOVITRAC B,点对点通信方式,下载伺服启动信息,设置转动惯量为100,电机温度过高时立即停止然后把启动信息下载到伺服必须在禁止模式下;然后点通过扩展总线控制,选择通信方式为DP,然后电子齿轮比用默认值,不能点击Caculate,即电子齿轮比全部采用默认值,直接点击NEXT,然后设置软限位,然后下载到伺服必须在禁止模式下;然后进入监控模式,伺服启动必须先设置手动启动,此时状态字Motor turning为1,此时若IPOS reference位为0,必须进行寻参模式,才能启动自动模式,寻参模式启动方法如下:寻参:1.设置P902的参数,确定寻参类型为0,然后在控制模式下通过PC发控制字以及0转速给伺服,即启动寻参,寻参原位信号通过端子DI03端子功能为Reference Travel传入,为1时减速,脱离时停止,同时将当前位置清零,此时IPOS reference位为1;2.寻参过程中,如果Start复位,寻参停止,Start再置位后,如果这时的控制字还是寻参的信号,则还会继续寻参;即start一旦置位,就直接按照控制模式来运行;IPOS reference为1时,可进行自动模式启动,通过发控制字1106给PLC程序将当前位置清零;或者是给伺服控制器发送寻参控制字1106即要想使用自动模式必须先定零点;通过P920与P921更改软极限位置,因为没有使用硬件限位,所以不用硬件限位,硬件限位开关信号通过端子传入;3.HMI画面程序下载:使能CHANNEL2,并且使能REMOTE ,设置通信波特率为1.5M,然后在S7中点击CP5512MPI,点属性,设置为1.5M,即两个设备通信速率相同,否则找不到节点设备,然后在winccflexible中点连接,选择连接设备的plc型号以及通信方式为DP,然后点传输,此时检测HMI画面程序中是否有错误产生,然后更新HMI设备中的OS操作系统,更新完操作系统后,重新传输HMI画面程序;4.CPU与触摸屏通讯设置:断电启动HMI,然后点击HMI设置,在触摸屏点击MPI及DP地址设置,通讯波特率设为1.5mbit/s,设置dp/mpi地址,这样做的目的是确保触摸屏设置与cpu的通讯;5.PLC程序下载:将CPU的开关拨到STOP位置,PC与cpu的MPI接口通信,通信方式为CP5512MPI,CP5512属性中设置PG/PC为节点中的唯一主站,通信速率为187.5KB波特率,然后打开硬件组态,将硬件组态下载到CPU中,然后通过DP接口将程序下载到CPU中,此时通信方式设为自动模式,注意MMC不能带电插拔,否则容易损坏,DP接口可以在运行方式下更改程序;伺服控制器设置软限位时,通过监控过程输入字与过程输出字监控当前位置脉冲,监控时的inc代表脉冲的意思,如果前面设置伺服电子齿轮比时不点击calculate,则在软限位界面输入正反转极限位置;伺服不使用硬限位时,在use hardware switch 中选择no,若选择yes,则DI04和DI05端子接限位开关信号端;6.伺服在手动模式下不能设置目标位置随着按钮按下而增加,因为当松开按键时目标位置为当前位置值加一个很小的值,因为按钮下降沿并没有给伺服发送急停控制字,所以电机会转动,当转动到目标位置时,此时目标位为1,此时会给伺服发送控制字1906,所以电机会停下来,当停下来时电机位置有两种情况:一种是电机停止时由于波动实际位置可能在目标位置处,造成下次发送手动模式控制字被到位发送的控制字1906代替,而且发送零转速,造成按钮不起作用;另一种是电机停止实际位置不在目标位置处,按钮起作用;综上所述,手动模式下最好不要给伺服控制器发送目标位置双字;或者手动时加互锁断开目标位置位,不发送1906;7.伺服控制器与变频器进线电源换相并不影响伺服电机与三相异步电动机正反转;但是伺服控制器输出端必须与电机的接线正确,不能换相,若换相,会造成伺服控制器报8号报警,报警显示速度报警; 伺服过热时会自动打开风扇;到达软限位后78号报警;变频器输出端换相变频器不会报警,但是会造成三相异步电动机旋转方向发生改变;8.变频器端子控制优先于系统总线控制,即如果不修改P600等参数,即使给变频器发送使能,变频器也不会运行,也就无法控制电机;9.网关上面的BUS指示灯亮,表明网关与CPU通讯错误,一般是现场总线接头接触不良或者坏了,若果网关下面的红色H1指示灯亮表明网关与变频器系统总线通讯错误;正常情况下,网关下面H1与H2指示灯不亮,若变为红色,肯定出错;10.用系统总线连接网关与变频器时,即默认情况先通讯波特率都为500,此时通讯距离最远为100米,若超过100米,则把变频器与网关的通讯波特率都设为250;网关通讯波特率设置方法如下:进入studio软件,点扫描,出现网关及下面的变频器,变频器的名字为unnamed,点击网关,右键start,然后选择网关组态,出现对话框,此时无法修改网关通讯波特率,应点菜单设置,选择Authorization leveral授权级别,输入密码:4387;然后选择第二行的波特率,设为250.11.西铸网关H1指示灯不停闪烁是因为网关与变频器通讯受到干扰,所以网关不停扫描变频器,指示灯闪烁说明网关正在扫描变频器,故障原因是系统总线中间断线重新接的线,通讯线都不能接,现场总线也是,现场总线是专用的紫屏蔽线;12.DIP拨码开关:double in_line package双列直插式封装开关,一般接一个上拉电阻或者下拉电阻来做电位输入用;正转:foreward 反转:reversal 变频器端子控制所用电源都是变频器自己提供的,用继电器控制端子电源的通断;三菱E700变频器修改的是4、5、6这三个参数;13.浇注件数清零可以在触摸屏上设置一个按钮,该按钮属性的事件下的单击中设置函数为setvalue,设置值为零;。
S E W变频器调试步骤SEW变频器调试步骤一.确保连线全部完成,控制回路无接线差错。
二.给变频器加上电1.调出850参数(语言选择),将其设定成English(英语);2.调出802参数,将short menu设定成off。
三.变频器运行(一).开各台变频器(开环运行)1.调出770参数,将其设定为V/F模式;2.本控:调出870参数,显示:870 NOMANVAL OPERATION按→键,再按↑键显示:ROTATION SENSECCWE = EXIT CW按←(反转) 或→(正转) 键起动;按 Q 键停止;3.外控①短接 41 — 44 号端子( 或由电路开关加上此起动信号 ),②加入给定信号。
(二)联机运行(闭环运行)(此时必须将各台电机线、刹车线及编码器全部接上,此步可用来排除编码器接线错误。
)1.调出770参数,将其设定为speed control;2.调出510参数,设为yes;3.调出520参数,设为yes;4.开各台变频器(以上述开环运行方式开各台变频器)如报出10号故障,可能是相序错,调整相序开机;如报出12号故障,也可能是相序错,调整相序开机。
四.联动开机(开不出可能与各类参数设定有关)(一)短接从机102-44号端口(即自由运行状态)(二)开主机启动(三)主机开出后,辅机逐个脱去102-44号短接线注: 1 灌装机不允许反转2洗瓶机整体反转操作(指穿上大链后):①将主机41号端口线拆下,接入42号端口,正常开机则可;②各台辅机正、反转微调 :A短接102、44号端口(即自由运行状态)B以变频器旁按钮盒操作,即将旋钮打在正或反转状态C按下点动按钮,将链条松紧调至合适位置(与机械配合).附主要参数(其他参数按图纸设定)灌装机(以GY80为例)灌装机参数设定主动机从动机注:编码器部分94(+5V) 97(0V)编码器电源95(+5V) 96(0V)传感器电源对于编码器有10个端口的94、95、96、97必须分开 8 个端口的:94、95 96、97故障信号和故障原因清单:。
SEW伺服电机零点设置方法1.打开软件,连接变频器,打开shell,双击Application目录下的Extendedpositioning via bus (图1),打开调试软件界面(图2)。
2.首先使变频器X13接口DI00电源断开,把monitor模式切换成control模式,此时可以通过SEW软件手动模拟外部总线发送的控制字。
3.设置P01控制字为0A06(P01 control word 2)(图3),此时控制字为手动jog模式,正方向转动P02、03 不需要设置P04 设置速度(建议100以下)P05 为加速 Ramp(建议6000ms)P06 为减速Ramp (建议 6000ms)4.手动设置控制字和控制参数后,点击SendPA 按钮,此时所有手动设置参数被传送到变频器,伺服电机开始移动。
5.设置P02控制字的第二位(Enable/Rapid stop)或者第三位(Enable/Stop),然后点击SendPA按钮,可以停止电机转动。
(建议用Enable/Stop)6.紧急情况:可以按工位的急停按钮或者直接打开安全门,此时可以断开变频器的使能,直接使电机停止运转。
7.电机反转时,P02控制字设置为:0C06,其余操作相同。
8.手动移动伺服电机到零点位置,设置P02控制参数为1100,点击SendPA按钮,即可把当前位置设为零点参考位置(图4)。
9.零点设置完成后,把control模式更改为monitor模式。
具体可以参考SEW资料:MOVIDRIVE MDX61B Extended Positioning via Bus Application.pdf1.打开软件调试界面图12.更改操作模式从monitor到control。
图23.jog 设置,手动运动图34.地板伺服到达零点位置后,设置当前位置为零点方法图45.设置完成后,把control 改为monitor control模式69547。
SEW伺服电机零点设置方法
1.打开软件,连接变频器,打开shell,双击Application目录下的Extended
positioning via bus (图1),打开调试软件界面(图2)。
2.首先使变频器X13接口DI00电源断开,把monitor模式切换成control模式,此时
可以通过SEW软件手动模拟外部总线发送的控制字。
3.设置P01控制字为0A06(P01 control word 2)(图3),此时控制字为手动jog模
式,正方向转动
P02、03 不需要设置
P04 设置速度(建议100以下)
P05 为加速 Ramp(建议6000ms)
P06 为减速Ramp (建议 6000ms)
4.手动设置控制字和控制参数后,点击SendPA 按钮,此时所有手动设置参数被传送
到变频器,伺服电机开始移动。
5.设置P02控制字的第二位(Enable/Rapid stop)或者第三位(Enable/Stop),然后
点击SendPA按钮,可以停止电机转动。
(建议用Enable/Stop)
6.紧急情况:可以按工位的急停按钮或者直接打开安全门,此时可以断开变频器的使
能,直接使电机停止运转。
7.电机反转时,P02控制字设置为:0C06,其余操作相同。
8.手动移动伺服电机到零点位置,设置P02控制参数为1100,点击SendPA按钮,即
可把当前位置设为零点参考位置(图4)。
9.零点设置完成后,把control模式更改为monitor模式。
具体可以参考SEW资料:
MOVIDRIVE MDX61B Extended Positioning via Bus Application.pdf
1.打开软件调试界面
图1
2.更改操作模式从monitor到control。
图2
3.jog 设置,手动运动
图3
4.地板伺服到达零点位置后,设置当前位置为零点方法
图4
5.设置完成后,把control 改为monitor control模式69547。