北邮模式识别课堂作业答案(参考)
- 格式:docx
- 大小:61.03 KB
- 文档页数:7
第一次课堂作业⏹ 1.人在识别事物时是否可以避免错识?⏹ 2.如果错识不可避免,那么你是否怀疑你所看到的、听到的、嗅到的到底是真是的,还是虚假的?⏹ 3.如果不是,那么你依靠的是什么呢?用学术语言该如何表示。
⏹ 4.我们是以统计学为基础分析模式识别问题,采用的是错误概率评价分类器性能。
如果不采用统计学,你是否能想到还有什么合理地分类器性能评价指标来替代错误率?1.知觉的特性为选择性、整体性、理解性、恒常性。
错觉是错误的知觉,是在特定条件下产生的对客观事物歪曲的知觉。
认知是一个过程,需要大脑的参与.人的认知并不神秘,也符合一定的规律,也会产生错误2.不是3.辨别事物的最基本方法是计算. 从不同事物所具有的不同属性为出发点认识事物. 一种是对事物的属性进行度量,属于定量的表示方法(向量表示法)。
另一种则是对事务所包含的成分进行分析,称为定性的描述(结构性描述方法)。
4.风险第二次课堂作业⏹作为学生,你需要判断今天的课是否点名。
结合该问题(或者其它你熟悉的识别问题,如”天气预报”),说明:⏹先验概率、后验概率和类条件概率?⏹按照最小错误率如何决策?⏹按照最小风险如何决策?ωi为老师点名的事件,x为判断老师点名的概率1.先验概率: 指根据以往经验和分析得到的该老师点名的概率,即为先验概率P(ωi )后验概率: 在收到某个消息之后,接收端所了解到的该消息发送的概率称为后验概率。
在上过课之后,了解到的老师点名的概率为后验概率P(ωi|x)类条件概率:在老师点名这个事件发生的条件下,学生判断老师点名的概率p(x| ωi )2.如果P(ω1|X)>P(ω2|X),则X归为ω1类别如果P(ω1|X)≤P(ω2|X),则X归为ω2类别3.1)计算出后验概率已知P(ωi)和P(X|ωi),i=1,…,c,获得观测到的特征向量X根据贝叶斯公式计算j=1,…,x2)计算条件风险已知: 后验概率和决策表计算出每个决策的条件风险3) 找出使条件风险最小的决策αk,则αk就是最小风险贝叶斯决策。
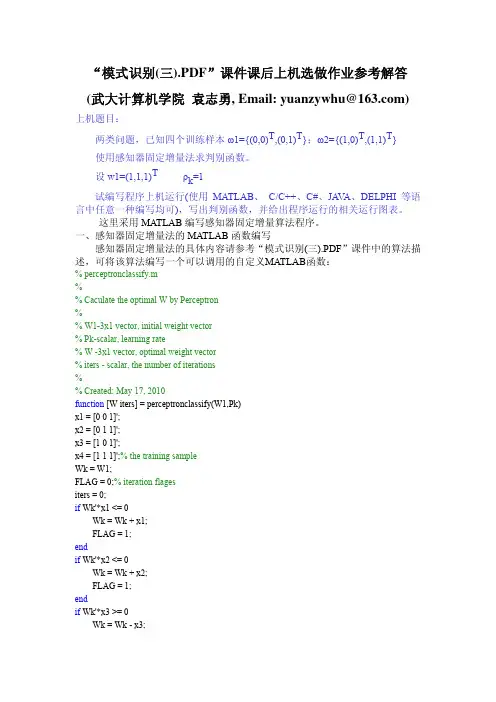
“模式识别(三).PDF”课件课后上机选做作业参考解答(武大计算机学院袁志勇, Email: yuanzywhu@) 上机题目:两类问题,已知四个训练样本ω1={(0,0)T,(0,1)T};ω2={(1,0)T,(1,1)T}使用感知器固定增量法求判别函数。
设w1=(1,1,1)Tρk=1试编写程序上机运行(使用MATLAB、 C/C++、C#、JA V A、DELPHI等语言中任意一种编写均可),写出判别函数,并给出程序运行的相关运行图表。
这里采用MATLAB编写感知器固定增量算法程序。
一、感知器固定增量法的MATLAB函数编写感知器固定增量法的具体内容请参考“模式识别(三).PDF”课件中的算法描述,可将该算法编写一个可以调用的自定义MATLAB函数:% perceptronclassify.m%% Caculate the optimal W by Perceptron%% W1-3x1 vector, initial weight vector% Pk-scalar, learning rate% W -3x1 vector, optimal weight vector% iters - scalar, the number of iterations%% Created: May 17, 2010function [W iters] = perceptronclassify(W1,Pk)x1 = [0 0 1]';x2 = [0 1 1]';x3 = [1 0 1]';x4 = [1 1 1]';% the training sampleWk = W1;FLAG = 0;% iteration flagesiters = 0;if Wk'*x1 <= 0Wk =Wk + x1;FLAG = 1;endif Wk'*x2 <= 0Wk =Wk + x2;FLAG = 1;endif Wk'*x3 >= 0Wk=Wk-x3;FLAG = 1; endif Wk'*x4 >= 0Wk =Wk -x4; FLAG = 1; enditers = iters + 1; while (FLAG) FLAG = 0; if Wk'*x1 <= 0Wk = Wk + x1; FLAG = 1; endif Wk'*x2 <= 0Wk = Wk + x2; FLAG = 1; endif Wk'*x3 >= 0 Wk = Wk - x3; FLAG = 1; endif Wk'*x4 >= 0 Wk = Wk - x4; FLAG = 1; enditers = iters + 1; endW = Wk;二、程序运行程序输入:初始权向量1W , 固定增量大小k ρ 程序输出:权向量最优解W , 程序迭代次数iters 在MATLAB 7.X 命令行窗口中的运行情况: 1、初始化1[111]T W = 初始化W 1窗口界面截图如下:2、初始化1kρ=初始化Pk 窗口界面截图如下:3、在MATLAB 窗口中调用自定义的perceptronclassify 函数由于perceptronclassify.m 下自定义的函数文件,在调用该函数前需要事先[Set path…]设置该函数文件所在的路径,然后才能在命令行窗口中调用。
模式识别习题及答案模式识别习题及答案模式识别是人类智能的重要组成部分,也是机器学习和人工智能领域的核心内容。
通过模式识别,我们可以从大量的数据中发现规律和趋势,进而做出预测和判断。
本文将介绍一些模式识别的习题,并给出相应的答案,帮助读者更好地理解和应用模式识别。
习题一:给定一组数字序列,如何判断其中的模式?答案:判断数字序列中的模式可以通过观察数字之间的关系和规律来实现。
首先,我们可以计算相邻数字之间的差值或比值,看是否存在一定的规律。
其次,我们可以将数字序列进行分组,观察每组数字之间的关系,看是否存在某种模式。
最后,我们还可以利用统计学方法,如频率分析、自相关分析等,来发现数字序列中的模式。
习题二:如何利用模式识别进行图像分类?答案:图像分类是模式识别的一个重要应用领域。
在图像分类中,我们需要将输入的图像分为不同的类别。
为了实现图像分类,我们可以采用以下步骤:首先,将图像转换为数字表示,如灰度图像或彩色图像的像素矩阵。
然后,利用特征提取算法,提取图像中的关键特征。
接下来,选择合适的分类算法,如支持向量机、神经网络等,训练模型并进行分类。
最后,评估分类结果的准确性和性能。
习题三:如何利用模式识别进行语音识别?答案:语音识别是模式识别在语音信号处理中的应用。
为了实现语音识别,我们可以采用以下步骤:首先,将语音信号进行预处理,包括去除噪声、降低维度等。
然后,利用特征提取算法,提取语音信号中的关键特征,如梅尔频率倒谱系数(MFCC)。
接下来,选择合适的分类算法,如隐马尔可夫模型(HMM)、深度神经网络(DNN)等,训练模型并进行语音识别。
最后,评估识别结果的准确性和性能。
习题四:如何利用模式识别进行时间序列预测?答案:时间序列预测是模式识别在时间序列分析中的应用。
为了实现时间序列预测,我们可以采用以下步骤:首先,对时间序列进行平稳性检验,确保序列的均值和方差不随时间变化。
然后,利用滑动窗口或滚动平均等方法,将时间序列划分为训练集和测试集。
模式识别非学位课考试试题考试科目:模式识别考试时间考生姓名: 考生学号任课教师考试成绩一、简答题(每题6分,12题共72分):1、监督学习和非监督学习有什么区别?参考答案:监督学习与非监督学习的区别:监督学习方法用来对数据实现分类,分类规则通过训练获得。
该训练集由带分类号的数据集组成,因此监督学习方法的训练过程是离线的.非监督学习方法不需要单独的离线训练过程,也没有带分类号(标号)的训练数据集,一般用来对数据集进行分析,如聚类,确定其分布的主分量等.2、你如何理解特征空间?表示样本有哪些常见方法?参考答案:由利用某些特征描述的所有样本组成的集合称为特征空间或者样本空间,特征空间的维数是描述样本的特征数量。
描述样本的常见方法:矢量、矩阵、列表等。
3、什么是分类器?有哪些常见的分类器?参考答案:将特征空中的样本以某种方式区分开来的算法、结构等。
例如:贝叶斯分类器、神经网络等。
4、进行模式识别在选择特征时应该注意哪些问题?参考答案:特征要能反映样本的本质;特征不能太少,也不能太多;要注意量纲。
5、聚类分析中,有哪些常见的表示样本相似性的方法?参考答案:距离测度、相似测度和匹配测度。
距离测度例如欧氏距离、绝对值距离、明氏距离、马氏距离等。
相似测度有角度相似系数、相关系数、指数相似系数等。
6、SVM的主要思想可以概括为两点:(1)它是针对线性可分情况进行分析,对于线性不可分的情况,通过使用非线性映射算法将低维输入空间线性不可分的样本转化为高维特征空间使其线性可分,从而使得高维特征空间采用线性算法对样本的非线性特征进行线性分析成为可能;(2)它基于结构风险最小化理论之上在特征空间中建构最优分割超平面,使得学习器得到全局最优化,并且在整个样本空间的期望风险以某个概率满足一定上界。
7、请论述模式识别系统的主要组成部分及其设计流程,并简述各组成部分中常用方法的主要思想。
特征空间信息获取:通过测量、采样和量化,可以用矩阵或向量表示二维图像或以为波形。
模式识别试题二答案问答第1题答:在模式识别学科中,就“模式”与“模式类”而言,模式类是一类事物的代表,概念或典型,而“模式”则是某一事物的具体体现,如“老头”是模式类,而王先生则是“模式”,是“老头”的具体化。
问答第2题答:Mahalanobis距离的平方定义为:其中x,u为两个数据,是一个正定对称矩阵(一般为协方差矩阵)。
根据定义,距某一点的Mahalanobis距离相等点的轨迹是超椭球,如果是单位矩阵Σ,则Mahalanobis距离就是通常的欧氏距离。
问答第3题答:监督学习方法用来对数据实现分类,分类规则通过训练获得。
该训练集由带分类号的数据集组成,因此监督学习方法的训练过程是离线的。
非监督学习方法不需要单独的离线训练过程,也没有带分类号(标号)的训练数据集,一般用来对数据集进行分析,如聚类,确定其分布的主分量等。
就道路图像的分割而言,监督学习方法则先在训练用图像中获取道路象素与非道路象素集,进行分类器设计,然后用所设计的分类器对道路图像进行分割。
使用非监督学习方法,则依据道路路面象素与非道路象素之间的聚类分析进行聚类运算,以实现道路图像的分割。
问答第4题答:动态聚类是指对当前聚类通过迭代运算改善聚类;分级聚类则是将样本个体,按相似度标准合并,随着相似度要求的降低实现合并。
问答第5题答:在给定观察序列条件下分析它由某个状态序列S产生的概率似后验概率,写成P(S|O),而通过O求对状态序列的最大似然估计,与贝叶斯决策的最小错误率决策相当。
问答第6题答:协方差矩阵为,则1)对角元素是各分量的方差,非对角元素是各分量之间的协方差。
2)主分量,通过求协方差矩阵的特征值,用得,则,相应的特征向量为:,对应特征向量为,对应。
这两个特征向量即为主分量。
3) K-L变换的最佳准则为:对一组数据进行按一组正交基分解,在只取相同数量分量的条件下,以均方误差计算截尾误差最小。
4)在经主分量分解后,协方差矩阵成为对角矩阵,因而各主分量间相关消除。

作业一:设以下模式类别具有正态概率密度函数: ω1:{(0 0)T , (2 0)T , (2 2)T , (0 2)T }ω2:{(4 4)T , (6 4)T , (6 6)T , (4 6)T }(1)设P(ω1)= P(ω2)=1/2,求这两类模式之间的贝叶斯判别界面的方程式。
(2)绘出判别界面。
答案:(1)模式的均值向量m i 和协方差矩阵C i 可用下式估计:2,111==∑=i x N m i N j ij i i2,1))((11=--=∑=i m x m x N C i N j Ti ij i ij i i 其中N i 为类别ωi 中模式的数目,x ij 代表在第i 个类别中的第j 个模式。
由上式可求出:T m )11(1= T m )55(2= ⎪⎪⎭⎫ ⎝⎛===1 00 121C C C ,⎪⎪⎭⎫⎝⎛=-1 00 11C 设P(ω1)=P(ω2)=1/2,因C 1=C 2,则判别界面为:24442121)()()(2121211112121=+--=+--=----x x m C m m C m x C m m x d x d T T T(2)作业二:编写两类正态分布模式的贝叶斯分类程序。
程序代码:#include<iostream>usingnamespace std;void inverse_matrix(int T,double b[5][5]){double a[5][5];for(int i=0;i<T;i++)for(int j=0;j<(2*T);j++){ if (j<T)a[i][j]=b[i][j];elseif (j==T+i)a[i][j]=1.0;elsea[i][j]=0.0;}for(int i=0;i<T;i++){for(int k=0;k<T;k++){if(k!=i){double t=a[k][i]/a[i][i];for(int j=0;j<(2*T);j++){double x=a[i][j]*t;a[k][j]=a[k][j]-x;}}}}for(int i=0;i<T;i++){double t=a[i][i];for(int j=0;j<(2*T);j++)a[i][j]=a[i][j]/t;}for(int i=0;i<T;i++)for(int j=0;j<T;j++)b[i][j]=a[i][j+T];}void get_matrix(int T,double result[5][5],double a[5]) {for(int i=0;i<T;i++){for(int j=0;j<T;j++){result[i][j]=a[i]*a[j];}}}void matrix_min(int T,double a[5][5],int bb){for(int i=0;i<T;i++){for(int j=0;j<T;j++)a[i][j]=a[i][j]/bb;}}void getX(int T,double res[5],double a[5],double C[5][5]) {for(int i=0;i<T;i++)double sum=0.0;for(int j=0;j<T;j++)sum+=a[j]*C[j][i];res[i]=sum;}}int main(){int T;int w1_num,w2_num;double w1[10][5],w2[10][5],m1[5]={0},m2[5]={0},C1[5][5]={0},C2[5][5]={0};cin>>T>>w1_num>>w2_num;for(int i=0;i<w1_num;i++){for(int j=0;j<T;j++){cin>>w1[i][j];m1[j]+=w1[i][j];}}for(int i=0;i<w2_num;i++){for(int j=0;j<T;j++){cin>>w2[i][j];m2[j]+=w2[i][j];}}for(int i=0;i<w1_num;i++)m1[i]=m1[i]/w1_num;for(int i=0;i<w2_num;i++)m2[i]=m2[i]/w2_num;for(int i=0;i<w1_num;i++){double res[5][5],a[5];for(int j=0;j<T;j++)a[j]=w1[i][j]-m1[j];get_matrix(T,res,a);for(int j=0;j<T;j++){for(int k=0;k<T;k++)C1[j][k]+=res[j][k];}matrix_min(T,C1,w1_num);for(int i=0;i<w2_num;i++){double res[5][5],a[5];for(int j=0;j<T;j++)a[j]=w2[i][j]-m2[j];get_matrix(T,res,a);for(int j=0;j<T;j++){for(int k=0;k<T;k++)C2[j][k]+=res[j][k];}}matrix_min(T,C2,w2_num);inverse_matrix(T,C1);inverse_matrix(T,C2);double XX[5]={0},C_C1[5]={0},C_C2[5]={0};double m1_m2[5];for(int i=0;i<T;i++){m1_m2[i]=m1[i]-m2[i];}getX(T,XX,m1_m2,C1);getX(T,C_C1,m1,C1);getX(T,C_C2,m2,C1);double resultC=0.0;for(int i=0;i<T;i++)resultC-=C_C1[i]*C_C1[i];for(int i=0;i<T;i++)resultC+=C_C2[i]*C_C2[i];resultC=resultC/2;cout<<"判别函数为:"<<endl;cout<<"d1(x)-d2(x)=";for(int i=0;i<T;i++)cout<<XX[i]<<"x"<<i+1;if(resultC>0)cout<<"+"<<resultC<<endl;elseif(resultC<0)cout<<resultC<<endl;return 0;}运行截图:。

第一章绪论1 •什么是模式?具体事物所具有的信息。
模式所指的不是事物本身,而是我们从事物中获得的—信息__。
2. 模式识别的定义? 让计算机来判断事物。
3. 模式识别系统主要由哪些部分组成? 数据获取一预处理一特征提取与选择一分类器设计/分类决策。
第二章贝叶斯决策理论P ( W 2 ) / p ( w 1 ) _,贝V X1. 最小错误率贝叶斯决策过程?答:已知先验概率,类条件概率。
利用贝叶斯公式 得到后验概率。
根据后验概率大小进行决策分析。
2 .最小错误率贝叶斯分类器设计过程?答:根据训练数据求出先验概率P ( W i ), i类条件概率分布p ( x | W i ), i 1 , 2 利用贝叶斯公式得到后验概率P (W i | x)P(X | W j )P(W j )j 1如果输入待测样本 X ,计算X 的后验概率根据后验概率大小进行分类决策分析。
3. 最小错误率贝叶斯决策规则有哪几种常用的表示形式?决策规则的不同形式(董点)C1^ 如vr, | JV ) = max 戶(vr ] WJ A * U vtvEQ 如杲尹a H ; )2^(ir, ) = max |沪0輕』),则x e HpCx |=尸4 "J"匕< 4) 如!4i= — 1IL | /( JV )] = — 111 戸(兀 | w”. ) -+- 11111r a4. 贝叶斯决策为什么称为最小错误率贝叶斯决策?答:最小错误率Bayes 决策使得每个观测值下的条件错误率最小因而保证了 (平均)错误率最小。
Bayes 决策是最优决策:即,能使决策错误率最小。
5 .贝叶斯决策是 由先验概率和(类条件概率)概率,推导(后验概率)概率,然后利用这 个概率进行决策。
6.利用乘法法则和全概率公式证明贝叶斯公式p(AB) p(A|B)p(B) p(B|A)p(A)P (A」B )答:m所以推出贝叶斯公式p(B) p(B|Aj)p(Aj)j 17. 朴素贝叶斯方法的条件独立D (1P (x | W i ) P(W i )i i入)2P(x | W j ) P (w j )j 11 ,2P (x | W i )P(W i )如果 I (x)P(B |A i )P(AJ P ( B ) P ( B | A i ) P ( A i ) 7MP ( B | A j ) P ( A j )2假设是( P(x| 3 i) =P(x1, x2, …,xn | co i)19.=P(x1|3 i) P(x2| 3 i)…P(xn| 3 i))8•怎样利用朴素贝叶斯方法获得各个属性的类条件概率分布?答:假设各属性独立,P(x| 3 i) =P(x1, x2, …,xn |3 i) = P(x1| 3 i) P(x2| 3 i)P(xn| 3 i)后验概率:P( 3 i|x) = P( 3 i) P(x1|3 i) P(x2| 3 i)…P(xn| 3 i)类别清晰的直接分类算,如果是数据连续的,假设属性服从正态分布,算出每个类的均值方 差,最后得到类条件概率分布。
一、填空与选择填空(本题答案写在此试卷上,30分)1、模式识别系统的基本构成单元包括:模式采集、特征提取与选择和模式分类。
2、统计模式识别中描述模式的方法一般使用特真矢量;句法模式识别中模式描述方法一般有串、树、网。
3、聚类分析算法属于(1);判别域代数界面方程法属于(3)。
(1)无监督分类 (2)有监督分类(3)统计模式识别方法(4)句法模式识别方法4、若描述模式的特征量为0-1二值特征量,则一般采用(4)进行相似性度量。
(1)距离测度(2)模糊测度(3)相似测度(4)匹配测度5、下列函数可以作为聚类分析中的准则函数的有(1)(3)(4)。
(1)(2) (3)(4)6、Fisher线性判别函数的求解过程是将N维特征矢量投影在(2)中进行。
(1)二维空间(2)一维空间(3)N-1维空间7、下列判别域界面方程法中只适用于线性可分情况的算法有(1);线性可分、不可分都适用的有(3)。
(1)感知器算法(2)H-K算法(3)积累位势函数法8、下列四元组中满足文法定义的有(1)(2)(4)。
(1)({A, B}, {0, 1}, {A→01, A→ 0A1 , A→ 1A0 , B→BA , B→ 0}, A)(2)({A}, {0, 1}, {A→0, A→ 0A}, A)(3)({S}, {a, b}, {S → 00S, S → 11S, S → 00, S → 11}, S)(4)({A}, {0, 1}, {A→01, A→ 0A1, A→ 1A0}, A)二、(15分)简答及证明题(1)影响聚类结果的主要因素有那些?(2)证明马氏距离是平移不变的、非奇异线性变换不变的。
答:(1)分类准则,模式相似性测度,特征量的选择,量纲。
(2)证明:(2分)(2分)(1分)设,有非奇异线性变换:(1分)(4分)三、(8分)说明线性判别函数的正负和数值大小在分类中的意义并证明之。
答:(1)(4分)的绝对值正比于到超平面的距离平面的方程可以写成式中。
1、PCA和LDA的区别?PCA是一种无监督的映射方法,LDA是一种有监督的映射方法。
PCA只是将整组数据映射到最方便表示这组数据的坐标轴上,映射时没有利用任何数据内部的分类信息。
因此,虽然做了PCA后,整组数据在表示上更加方便(降低了维数并将信息损失降到了最低),但在分类上也许会变得更加困难;LDA在增加了分类信息之后,将输入映射到了另外一个坐标轴上,有了这样一个映射,数据之间就变得更易区分了(在低纬上就可以区分,减少了很大的运算量),它的目标是使得类别内的点距离越近越好,类别间的点越远越好。
2、最大似然估计和贝叶斯方法的区别?p(x|X)是概率密度函数,X是给定的训练样本的集合,在哪种情况下,贝叶斯估计接近最大似然估计?最大似然估计把待估的参数看做是确定性的量,只是其取值未知。
利用已知的样本结果,反推最有可能(最大概率)导致这样结果的参数值(模型已知,参数未知)。
贝叶斯估计则是把待估计的参数看成是符合某种先验概率分布的随机变量。
对样本进行观测的过程,把先验概率密度转化为后验概率密度,利用样本的信息修正了对参数的初始估计值。
当训练样本数量趋于无穷的时候,贝叶斯方法将接近最大似然估计。
如果有非常多的训练样本,使得p(x|X)形成一个非常显著的尖峰,而先验概率p(x)又是均匀分布,此时两者的本质是相同的。
3、为什么模拟退火能够逃脱局部极小值?在解空间内随机搜索,遇到较优解就接受,遇到较差解就按一定的概率决定是否接受,这个概率随时间的变化而降低。
实际上模拟退火算法也是贪心算法,只不过它在这个基础上增加了随机因素。
这个随机因素就是:以一定的概率来接受一个比单前解要差的解。
通过这个随机因素使得算法有可能跳出这个局部最优解。
4、最小错误率和最小贝叶斯风险之间的关系?基于最小风险的贝叶斯决策就是基于最小错误率的贝叶斯决策,换言之,可以把基于最小错误率决策看做是基于最小风险决策的一个特例,基于最小风险决策本质上就是对基于最小错误率公式的加权处理。
第一次课堂作业⏹ 1.人在识别事物时是否可以避免错识?⏹ 2.如果错识不可避免,那么你是否怀疑你所看到的、听到的、嗅到的到底是真是的,还是虚假的?⏹ 3.如果不是,那么你依靠的是什么呢?用学术语言该如何表示。
⏹ 4.我们是以统计学为基础分析模式识别问题,采用的是错误概率评价分类器性能。
如果不采用统计学,你是否能想到还有什么合理地分类器性能评价指标来替代错误率?1.知觉的特性为选择性、整体性、理解性、恒常性。
错觉是错误的知觉,是在特定条件下产生的对客观事物歪曲的知觉。
认知是一个过程,需要大脑的参与.人的认知并不神秘,也符合一定的规律,也会产生错误2.不是3.辨别事物的最基本方法是计算.从不同事物所具有的不同属性为出发点认识事物.一种是对事物的属性进行度量,属于定量的表示方法(向量表示法)。
另一种则是对事务所包含的成分进行分析,称为定性的描述(结构性描述方法)。
4.风险第二次课堂作业⏹作为学生,你需要判断今天的课是否点名。
结合该问题(或者其它你熟悉的识别问题,如”天气预报”),说明:⏹先验概率、后验概率和类条件概率?⏹按照最小错误率如何决策?⏹按照最小风险如何决策?ωi为老师点名的事件,x为判断老师点名的概率1.先验概率:指根据以往经验和分析得到的该老师点名的概率,即为先验概率P(ωi )后验概率:在收到某个消息之后,接收端所了解到的该消息发送的概率称为后验概率。
在上过课之后,了解到的老师点名的概率为后验概率P(ωi|x)类条件概率:在老师点名这个事件发生的条件下,学生判断老师点名的概率p(x| ωi )2.如果P(ω1|X)>P(ω2|X),则X归为ω1类别如果P(ω1|X)≤P(ω2|X),则X归为ω2类别3.1)计算出后验概率已知P(ωi)和P(X|ωi),i=1,…,c,获得观测到的特征向量X根据贝叶斯公式计算j=1,…,x2)计算条件风险已知: 后验概率和决策表计算出每个决策的条件风险3) 找出使条件风险最小的决策αk,则αk就是最小风险贝叶斯决策。
第3次课堂作业1.正态分布概率下采用最小错误率贝叶斯决策,满足什么条件时,分类边界是线性函数?2.什么是参数估计,什么是非参数估计(分别举例解释)?1.在正态分布条件下,基于最小错误率贝叶斯决策只要能做到两类协方差矩阵是一样的,那么无论先验概率相等不相等,都可以用线性分界面实现。
a)在Σi=σ2I P(ωi)=P(ωj)条件下,正态分布概率模型下的最小错误率贝叶斯决策等价于最小距离分类器b)Σi=σ2I P(ωi) P(ωj)判别函数为最小欧氏距距离分类器c)2)Σi=Σ判别函数线性分类器2.参数估计:已经随机变量服从正态分布,估计均值为µ和方差ε非参数估计:未知数学模型,直接估计概率密度函数自己举例子吧参数估计:基于贝叶斯的最小错误率估计方法非参数估计:Parzen窗口估计k N近邻估计第4次课堂作业对比两种方法,回答:1.你怎样理解极大似然估计。
2.你怎样理解贝叶斯估计基本思想。
1.极大似然估计:已经得到实验结果的情况下,寻找着使得这个结果出现的可能性最大的那个数值作為θ的估计2.贝叶斯估计基本思想:已知参数θ的概率密度函数,根据样本的观测值,基于贝叶斯决策来估计参数(理解部分,自己加吧加吧)第6次课堂作业1.线性分类器的分界面是什么曲线?在线性判别函数条件下它对应d维空间的一个超平面g(X)=0就是相应的决策面方程2.在两维空间存在一条不过原点的直线,a x1+b x2+c=0,采用增广向量形式:那么,在增加一维的三维空间中,αT Y=0表示的是,它的方程表示为。
Y=[1;x2;x1] a=[c;b;a]三维空间中决策面为一过原点的平面这样,特征空间增加了一维,但保持了样本间的欧氏距离不变对于分类效果也与原决策面相同,只是在Y空间中决策面是通过坐标原点的3.设五维空间的线性方程为55x1 + 68x2 + 32x3 + 16x4 + 26x5 + 10 = 0, 试求出其权向量与样本向量点积的表达式W T X + w0=0中的W , X和w0,以及增广样本向量形式中αT Y的α与Y。
W=[55,68,32,16,26]’ w0=10X=(x1,x2,x3,x4,x5)’A=*10,55,68,32,16,26+’Y=*1,x1,x2,x3,x4,x5)+’第七次作业1.线性分类器的分界面是超平面,线性分类器设计步骤是什么?2. Fisher线性判别函数是研究这类判别函数中最有影响的方法之一,请简述它的准则.3.感知器的准则函数是什么?它通过什么方法得到最优解?(1) 1.按需要确定一准则函数J。
2.确定准则函数J达到极值时W*及W*0的具体数值,从而确定判别函数,完成分类器设计。
(2)Fisher准则就是要找到一个最合适的投影轴,使两类样本在该轴上投影的交迭部分最少,从而使分类效果为最佳。
(3)训练样本的错分最小梯度下降法和迭代法第八次作业答案1.简述最近邻的决策规则2.简述k-最近邻的决策规则3.比较最近邻决策和最小错误率贝叶斯决策的错误率1.将与测试样本的类别作为决策的方法成为最近邻法2.找测试样本的k个最近样本做决策依据的方法3.最近邻法的渐近平均错误率的上下界分别为贝叶斯错误率由于一般情况下P*很小,因此又可粗略表示成第九次作业✶研究模式识别中事物的描述方法主要靠什么?✶设原特征空间表示成x=(x1,x2,x3)T ,即一个三维空间。
现在在x空间基础上得到一个二维的特征空间Y:(y1,y2)T–其中若y1=x1,y2=x2,属哪一种方法:特征选择还是特征提取?–若,试问属哪种?–怎样利用距离可分性判据J2进行特征提取?1.模式就是用它们所具有的特征(Feature) 描述的。
a)一种是对事物的属性进行度量,属于定量的表示方法(向量表示法)。
b)另一种则是对事务所包含的成分进行分析,称为定性的描述(结构性描述方法)。
2.选择提取矩阵S w-1S b的本征值为λ1,λ2… λD,按大小顺序排列为:λ1≥ λ2≥ … ≥λD,选前d个本征值对应的本征向量作为W即: W =[μ1,μ2…μd]此时:J2 (W) = λ1+ λ2 + …+ λd第10次课堂作业✶简述PCA变换的基本思想?✶简述PCA变换的过程✶有那些特征选择的方法1.主成分分析(PCA)基本思想进行特征降维变换,不能完全地表示原有的对象,能量总会有损失。
希望找到一种能量最为集中的的变换方法使损失最小2.原始输入: x变换后特征:y变换矩阵(线性变换):A则y=A T x考虑以R x的特征向量作为A的列,则R y=A T R x A = [a1,a2……a n]T R x[a1,a2……a n]= [a1,a2……a n] T [λ1a1, λ2a2……λa n]=ΛnΛ为对角矩阵,对角线元素为λ1, λ2……λn达到变换后特征不相关的目的原有N维,只保留m维,如果对特征向量排序,舍到最小的特征,则损失的能量最小即去掉y m+1……y N3.特征提取按欧氏距离度量的特征提取方法按概率距离判据提取特征特征选择最优搜索算法次优搜索法:单独最优特征组合,顺序前进法,顺序后退法,增l减r法第十一次课堂作业✶联系实际问题或者人的认知过程,谈谈什么是无监督学习?无监督学习能完成什么任务?然而在实际应用中,不少情况下无法预先知道样本的标签,也就是说没有训练样本因而只能从原先没有样本标签的样本集开始进行分类器设计,这就是通常说的无监督学习方法。
计算机视觉⏹图像分割⏹基于内容的图像检索数据挖掘⏹推荐系统/协同过滤文本分类✶简述C均值聚类算法?误差平方和为准则,实现极小的聚类选定代表点后要进行初始划分、迭代计算C—均值算法可归纳成:⏹ (1) 选择某种方法把N 个样本分成C 个聚类的初始划分,计算每个聚类的均值和误差平方和j c⏹ (2) 选择一个备选样本y ,设其在第i 类⏹ (3) 若Ni=1,则转(2),否则继续⏹ (4) 计算⏹ (5) 对于所有的j ,若e j 最小,则把y 放入第j 类⏹ (6) 重新计算第i ,j 类的均值和j c⏹ (7) 若连续迭代N 次(即所有样本都运算过) 不变,则停止,否则转到2。
第十二次课堂作业✶ 画出前馈人工神经网络结构。
✶ 谈谈对期望风险、经验风险和结构风险的理解。
1.根据n 个独立同分布观测样本:(x1 , y1 ) , (x2 , y2 ) ,… , (xn, yn), 在一组函数)},({ωx f 中求一个最优的函数),(0ωx f 对依赖关系进行估计,使期望风险⎰=),()),(,()(0y x dF x f y L R ωω 最小经验风险最小化2.学习的目标在于使期望风险最小化,传统的学习方法中采用了所谓经验风险最小化(ERM)准则,即用样本定义经验风险 ∑==ni i i emp x f y L n R 1)),(,(1)(ωω作为对期望风险的估计 ,设计学习算法使它最小化3.结构风险最小化(Structural Risk Minimization 或译有序风险最小化)即SRM 准则实现SRM 原则可以有两种思路:1) 在每个子集中求最小经验风险,然后选择使最小经验风险和置信范围之和最小的子集;2) 设计函数集的某种结构使每个子集中都能取得最小的经验风险(如使训练误差为0 ) ,然后只需选择选择适当的子集使置信范围最小判断人工神经网络和支持向量机分别最小化哪一种风险。
经验网络。