第8章 史密斯预估控制
- 格式:ppt
- 大小:3.75 MB
- 文档页数:28
第五节 Smith 预估控制Smith 预估控制方法是在1957年由Smith 提出来的,其特点是预先估计被控系统在基本扰动下的动态特性,然后用预估器进行补偿,力图使被延迟的被控制量超前反映到控制器中,使控制器提前动作,从而显著地减小系统的超调量,同时加速系统的调节过程。
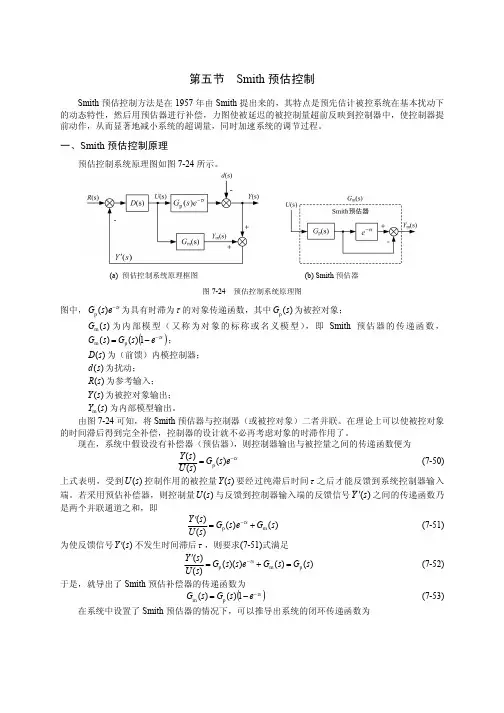
一、Smith 预估控制原理预估控制系统原理图如图7-24所示。
(a) 预估控制系统原理框图 (b) Smith 预估器图7-24 预估控制系统原理图 图中,s e s G τ−)(p 为具有时滞为τ的对象传递函数,其中)(p s G 为被控对象;)(m s G 为内部模型(又称为对象的标称或名义模型),即Smith 预估器的传递函数,()s e s G s G τ−−=1)()(p m ;)(s D 为(前馈)内模控制器;)(s d 为扰动;)(s R 为参考输入;)(s Y 为被控对象输出;)(m s Y 为内部模型输出。
由图7-24可知,将Smith 预估器与控制器(或被控对象)二者并联。
在理论上可以使被控对象的时间滞后得到完全补偿,控制器的设计就不必再考虑对象的时滞作用了。
现在,系统中假设没有补偿器(预估器),则控制器输出与被控量之间的传递函数便为 s e s G s U s Y τ−=)()()(p (7-50) 上式表明,受到)(s U 控制作用的被控量)(s Y 要经过纯滞后时间τ之后才能反馈到系统控制器输入端。
若采用预估补偿器,则控制量)(s U 与反馈到控制器输入端的反馈信号)(s Y ′之间的传递函数乃是两个并联通道之和,即)()()()(m p s G e s G s U s Y s +=′−τ (7-51) 为使反馈信号)(s Y ′不发生时间滞后τ,则要求(7-51)式满足)()())(()()(p m p s G s G e s s G s U s Y s =+=′−τ (7-52) 于是,就导出了Smith 预估补偿器的传递函数为()s e s G s G τ−−=1)()(p m (7-53) 在系统中设置了Smith 预估器的情况下,可以推导出系统的闭环传递函数为)()(1)()()1)(()(1)()(1)1)(()(1)()()()(p p p p p p s G s D e s G s D e s G s D e s G s D e s G s D e s G s D s R s Y s s s s+=−++−+=−−−−−ττττ (7-54) 由上式可以明显看出,在系统的特征方程中,已经不含有s e τ−项。
施密斯预估控制姓名:学号:班级:1 实验目的对大多数控制系统,采用常规的控制技术均可以达到满意的控制效果,但对于复杂及特殊要求的控制系统,采用常规的控制室技术很难达到目的,在这种情况下,就需要采用复杂控制技术,其中Smith 预估控制算法是常用的一种,通过本实验加深对Smith 预估控制算法的理解和掌握。
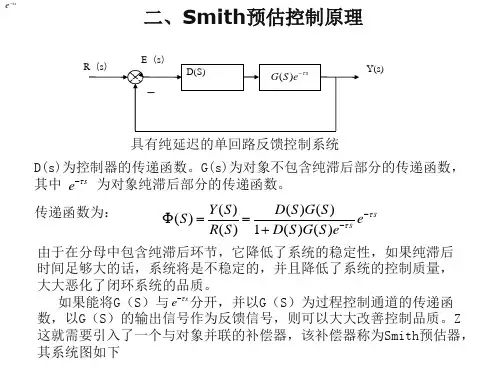
2 实验原理图1为被控对象具有纯滞后特性的单回路反馈控制系统,D (s )是控制器,被控对象的传递函数为etss -)(G p ,其中,)(G p s 为被控对象中不包含纯滞后部分的传递函数,ts-e为被控对象纯滞后部分的传递函数。
)(t r )(t e )(t u )(t y_施密斯预估原理:与D (s )并接一补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节称为预估器,其传递函数为)1)((G p tse s --,t 为纯滞后时间,补偿后的系统结构如图2所示。
)(t r )(t e )(t u )(t y_ _)(t y τ由施密斯预估控制器)1)((G p tses --和控制器D (s )组成的回路陈伟纯滞后补偿器,)(s Ds e s τ-)(G p)(s Ds e s τ-)(G p)1)((G p ts e s --其传递函数为:)1)(()(1)()(D m s p e s G s D s D s τ--+=经过补偿后的系统闭环传递函数为:s p p sp m sp m e s G s D s G s D es G s D e s G s D τττ---+=+=Φ)()(1)()()()(1)()(s )(该式说明,进过补偿后,消除了之后部分对控制系统的影响,因为式中ts-e 在闭环控制回路之外,不影响系统的稳定性。
设广义被控对象为:1011()()()1Ts s se e H s G s G s es T sττ----==⋅+取T=1、τ=2、T 1=2.88,经采样(T=1s )保持后,其广义对象z 传递函数为00.2934()0.7066G z z =-,而2se -转换为2个单位迟延。
史密斯(Smith)预估器工业生产过程中的大多数被控对象都具有较大的纯滞后性质。
被控对象的这种纯滞后性质经常引起超调和持续的振荡。
在20世纪50年代,国外就对工业生产过程中纯滞后现象进行了深入的研究,史密斯提出了一种纯滞后补偿模型,由于当时模拟仪表不能实现这种补偿,致使这种方法在工业实际中无法实现。
随着计算机技术的飞速发展,现在人们可以利用计算机方便地实现纯滞后补偿。
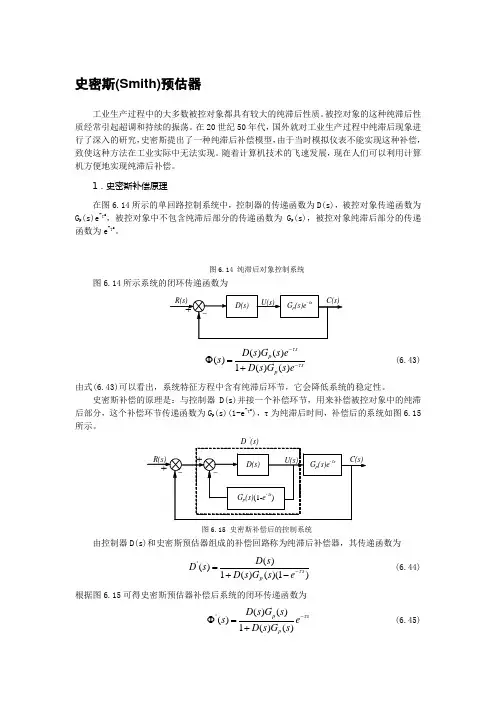
1.史密斯补偿原理在图6.14所示的单回路控制系统中,控制器的传递函数为D(s),被控对象传递函数为G p (s)e -τs ,被控对象中不包含纯滞后部分的传递函数为G p (s),被控对象纯滞后部分的传递函数为e -τs 。
图6.14 纯滞后对象控制系统图6.14所示系统的闭环传递函数为()()()1()()sp s p D s G s e s D s G s e ττ--Φ=+ (6.43)由式(6.43)可以看出,系统特征方程中含有纯滞后环节,它会降低系统的稳定性。
史密斯补偿的原理是:与控制器D(s)并接一个补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节传递函数为G p (s)(1-e -τs ),τ为纯滞后时间,补偿后的系统如图6.15所示。
‘图6.15 史密斯补偿后的控制系统由控制器D(s)和史密斯预估器组成的补偿回路称为纯滞后补偿器,其传递函数为'()()1()()(1)s p D s D s D s G s e τ-=+- (6.44) 根据图6.15可得史密斯预估器补偿后系统的闭环传递函数为 '()()()1()()p s p D s G s s e D s G s τ-Φ=+ (6.45)由式(6.45)可以看出,经过补偿后,纯滞后环节在闭环回路外,这样就消除了纯滞后环节对系统稳定性的影响。
拉氏变换的位移定理说明e -τs仅仅将控制作用在时间座标上推移了一个时间τ,而控制系统的过渡过程及其它性能指标都与对象特性为G p (s)时完全相同。
(此文档为word格式,下载后您可任意编辑修改!)扬州大学水利与能源动力工程学院课程设计报告题目:史密斯预估控制系统设计课程:计算机控制技术课程设计专业:电气工程及其自动化班级:电气1101姓名:学号:第一部分任务书《计算机控制技术》课程设计任务书一、课题名称史密斯预估控制系统设计二、课程设计目的课程设计是课程教学中的一项重要内容,是达到教学目标的重要环节,是综合性较强的实践教学环节,它对帮助学生全面牢固地掌握课堂教学内容、培养学生的实践和实际动手能力、提高学生全面素质具有很重要的意义。
《计算机控制技术》是一门理论性、实用性和实践性都很强的课程,课程设计环节应占有更加重要的地位。
计算机控制技术的课程设计是一个综合运用知识的过程,它需要控制理论、程序设计、硬件电路设计等方面的知识融合。
通过课程设计,加深对学生控制算法设计的认识,学会控制算法的实际应用,使学生从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计方法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的调试工作打下基础。
三、课程设计内容设计以89C51单片机和ADC 、DAC 等电路、由运放电路实现的被控对象构成的计算机单闭环反馈控制系统。
1. 硬件电路设计:89C51最小系统加上模入电路(用ADC0809等)和模出电路(用TLC7528和运放等);由运放实现的被控对象。
2. 控制算法:PID 控制加史密斯预估控制。
3. 软件设计:主程序、中断程序、A/D 转换程序、滤波程序、PID 控制加史密斯预估控制程序、D/A 输出程序等。
四、课程设计要求1. 模入电路能接受双极性电压输入(-5V~+5V ),模出电路能输出双极性电压(-5V~+5V )。
2. 模入电路用两个通道分别采集被控对象的输出和给定信号。
3. 每个同学选择不同的被控对象:5100.5 1.5(),()(1)(0.81)(1)(0.41)s s G s e G s e s s s s --==++++8810.5(),()(0.81)(0.41)(0.41)(0.51)s s G s e G s e s s s s --==++++581.52(),()(1)(0.21)(0.81)(0.21)s s G s e G s e s s s s --==++++ 5512(),()(0.81)(0.31)(0.81)(0.21)s s G s e G s e s s s s --==++++ 4. 对象的纯延迟环节用软件通过数组单元移位实现。
东南大学能源与环境学院实验报告课程名称:实验名称:院(系):专业:姓名:杨康学号:实验室:实验组别:同组人员:实验时间:年月日评定成绩:审阅教师:目录一.实验目的 (3)二.实验内容 (3)三.实验步骤 (3)四.实验分析 (12)实验二 Smith预估控制实验指导书一实验目的通过实验掌握Smith预估控制的方法及程序编制及调试。
二实验内容1.Smith预估控制系统如图所示,图一对象G(S)= K·e-τs / (1+TS),K = 1, T1 = 10 s , τ = 5 s ,1Wc(z)采用数字PI控制规律。
2.对象扰动实验画出U(t) = u0·1(t)时,y(t)曲线。
3.Smith预估控制(1)构造Wτ(S),求出Wτ(Z)。
(2)整定Wc(s)(按什么整定?)(3)按图仿真,并打印曲线。
(4)改变Wτ(S)中K,τ(对象不变),进行仿真比较,观察它们对调节过程的影响。
三实验步骤1、对象扰动实验(1)差分方程如附录。
(2)源程序如下:#include"iostream.h"#include"math.h"#include"fstream.h"void main(){fstream outfile("data1.xls",ios::out);double t;double u0;cout<<"请输入采样周期:";cin>>t;cout<<"请输入阶跃幅值:";cin>>u0;double ee=pow(2.718,(-t/10.0));int N;int i;double u[100],y[100];for(i=0;i<100;i++){u[i]=u0;y[i]=0.0;}N=1+5/t;for(i=N;i<100;i++){y[i]=(1-ee)*u[i-N]+y[i-1]*ee;}for(i=0;i*t<100;i++){cout<<y[i]<<'\t';}for(i=0;i*t<100;i++){outfile<<i*t<<'\t';}outfile<<'\n';for(i=0;i*t<100;i++){outfile<<y[i]<<'\t';}outfile.close();}(3)输出结果:当采样周期T=1,阶跃幅值为1时:Y(t)输出数据:0 0 0 0 0 0 0.0951532 0.181252 0.259159 0.3296520.393438 0.451154 0.503379 0.550634 0.593392 0.6320820.667091 0.698768 0.727431 0.753367 0.776835 0.798070.817284 0.83467 0.850402 0.864637 0.877517 0.8891720.899717 0.909259 0.917894 0.925706 0.932776 0.9391720.94496 0.950197 0.954936 0.959224 0.963104 0.9666150.969792 0.972666 0.975267 0.97762 0.97975 0.9816770.98342 0.984998 0.986425 0.987717 0.988886 0.9899430.9909 0.991766 0.99255 0.993259 0.9939 0.99448 0.9950060.995481 0.995911 0.9963 0.996652 0.996971 0.9972590.99752 0.997756 0.997969 0.998162 0.998337 0.9984960.998639 0.998768 0.998885 0.998991 0.999087 0.9991740.999253 0.999324 0.999388 0.999446 0.999499 0.9995470.99959 0.999629 0.999664 0.999696 0.999725 0.9997510.999775 0.999796 0.999816 0.999833 0.999849 0.9998630.999876 0.999888 0.999899 0.999908 0.999917阶跃响应曲线如下:图二2、Smith预估控制(1)差分方程见附录:(2)源程序如下:#include"iostream.h"#include"math.h"#include"fstream.h"void main(){fstream outfile("data1.xls",ios::out);double t,kp,ki;int t1,k;cout<<"请输入Wt(s)中的K:";cin>>k;cout<<"请输入Wt(s)中的迟延时间t:";cin>>t1;cout<<"请输入采样周期:";cin>>t;cout<<"请输入PI调节器的参数kp:";cin>>kp;cout<<"请输入PI调节器的参数ki:";cin>>ki;double ee=pow(2.718,(-t/10.0));int N,N1;int i;double r[100],e1[100],e2[100],cm[100],q[100],u[100],y[100];for(i=0;i<100;i++){r[i]=1.0;e1[i]=0.0;e2[i]=0.0;u[i]=0.0;y[i]=0.0;cm[i]=0.0;q[i]=0.0;}N=1+5/t;N1=t1/t;cout<<N<<'\t'<<N1<<endl;for(i=0;i<100;i++){if(i==0){e1[i]=r[i];cm[i]=0;q[i]=0;e2[i]=e1[i]-q[i];u[i]=kp*e2[i]+ki*e2[i];}if(i>0&&i<N1){e1[i]=r[i]-y[i-1];cm[i]=ee*cm[i-1]+k*(1-ee)*u[i-1];q[i]=cm[i];e2[i]=e1[i]-q[i];u[i]=u[i-1]+kp*(e2[i]-e2[i-1])+ki*e2[i];if(i>=N){y[i]=(1-ee)*u[i-N]+y[i-1]*ee;}}if(i>=N1){e1[i]=r[i]-y[i-1];cm[i]=ee*cm[i-1]+k*(1-ee)*u[i-1];q[i]=cm[i]-cm[i-N1];e2[i]=e1[i]-q[i];u[i]=u[i-1]+kp*(e2[i]-e2[i-1])+ki*e2[i];if(i>=N){y[i]=(1-ee)*u[i-N]+y[i-1]*ee;}}}for(i=0;i*t<100;i++){cout<<y[i]<<'\t';}for(i=0;i*t<100;i++){outfile<<i*t<<'\t';}outfile<<'\n';for(i=0;i*t<100;i++){outfile<<y[i]<<'\t';}outfile.close();}(3)输出结果:以下所涉及到的采样周期均为T=1,PI控制器的参数均为Kp=1,Ki=1;当Smith预估器中的K=1,延迟时间τ=5时(即与对象的特性完全符合):Y(t)输出数据:0 0 0 0 0 0 0.190306 0.421441 0.663641 0.8917551.08676 1.23639 1.37128 1.47104 1.5311 1.549551.52761 1.46956 1.38931 1.29344 1.18983 1.085670.987246 0.89981 0.828799 0.776983 0.745653 0.7345240.741955 0.765251 0.801257 0.846217 0.896223 0.947450.996402 1.04011 1.07631 1.1035 1.1209 1.12848 1.126831.11708 1.10079 1.07973 1.05581 1.03093 1.00680.984919 0.966463 0.952253 0.942744 0.938032 0.937890.941816 0.949101 0.958895 0.970279 0.982333 0.9941951.00511 1.01448 1.02186 1.02698 1.02978 1.030321.02882 1.02561 1.02108 1.01569 1.00987 1.004060.998627 0.993893 0.990086 0.98735 0.985745 0.9852490.985771 0.987163 0.989238 0.991783 0.994581 0.997421.00011 1.0025 1.00445 1.0059 1.0068 1.00715 1.0071.00641 1.00547 1.00428 1.00293 1.00155 1.000220.999027 0.998028 0.997269 0.996773扰动曲线如下:图三当Smith预估器中的K=1,延迟时间τ=2时(即与对象的特性不完全符合):Y(t)输出数据如下:0 0 0 0 0 0 0.190306 0.421441 0.663641 0.9279711.21095 1.50619 1.810532.08577 2.31463 2.489892.60123 2.63889 2.59562 2.46564 2.25095 1.958931.59989 1.18774 0.740093 0.277571 -0.176632 -0.598368-0.963966 -1.25121 -1.44044 -1.51579 -1.4662 -1.28642-0.977633 -0.547714 -0.0112532 0.610765 1.29164 1.999962.700933.358 3.934554.39588 4.71103 4.854644.80862 4.56351 4.11952 3.48712 2.68715 1.750360.716479 -0.367272 -1.44817 -2.47036 -3.37751 -4.11571-4.63639 -4.89916 -4.87439 -4.54543 -3.91026 -2.98249-1.79168 -0.38278 1.18524 2.8415 4.5062 6.09408 7.518558.69603 9.55045 10.0176 10.0494 9.61689 8.713477.35632 5.58704 3.47109 1.09587 -1.43244 -3.99312-6.45626 -8.68888 -10.5616 -11.9554 -12.7687 -12.9234-12.3704 -11.0941 -9.11507 -6.49149 -3.31832 0.2752394.13026 8.06445 11.88 15.3731 18.3435扰动曲线如下:图四当Smith预估器中的K=2,延迟时间τ=2时(即与对象的特性不完全符合):Y(t)输出数据如下:0 0 0 0 0 0 0.190306 0.385225 0.546344 0.7250840.920371 1.11455 1.30834 1.46909 1.59338 1.692661.7608 1.79027 1.78227 1.73766 1.66147 1.560211.43778 1.29949 1.15302 1.00558 0.863901 0.7341210.621319 0.529913 0.463425 0.423874 0.411896 0.4269230.467201 0.529943 0.611457 0.707298 0.812552 0.9221031.03084 1.13389 1.22683 1.30585 1.36793 1.410941.4337 1.43598 1.41848 1.38278 1.33121 1.266721.19274 1.11298 1.03127 0.951381 0.876845 0.8108160.75594 0.714253 0.687116 0.675179 0.67838 0.6959770.726605 0.768367 0.818936 0.875681 0.935797 0.9964341.05484 1.10845 1.15505 1.19281 1.22037 1.236891.24206 1.23609 1.21971 1.19405 1.16064 1.12131.07804 1.03296 0.988182 0.945705 0.907359 0.8747110.849012 0.831146 0.82161 0.820506 0.82755 0.8421020.863208 0.889656 0.920041 0.952835 0.986462 1.01937扰动曲线如下:图五四实验分析当系统是特征方程中含有纯迟延项的时候,系统的闭环稳定性事下降的,当迟延时间τ比较大的时候,系统就会不稳定。
《计算机控制》课程设计报告题目: Smith预估器控制设计姓名:《计算机控制》课程设计任务书指导教师签字:系(教研室)主任签字:2012年7月5 日Smith 预估器控制设计一、实验目的通过混合仿真实验,学习并掌握用于具有纯滞后系统的纯滞后补偿(Smith预估器控制)的设计及其实现。
二、实验内容被控对象为-512()2se G s s =+, 1.0s T =画出系统框图,设计Smith 数字预估器。
三、控制系统仿真 1.方案设计已知纯滞后负反馈控制系统,其中图1.其中D(s)为调节器传递函数,-512()2se G s s =+为对象传递函数,其中-5()sO G s e 包含纯滞后特性,纯滞后时间常数5τ=。
系统的特征方程为:5121()()1()02se D s G s D s s -+=+=+由于闭环特征方程中含有-5s e 项,产生纯滞后现象,/5/150.5m T τ==≥,采用常规的PID 控制会使系统稳定性变差,甚至产生振荡。
为了改善系统特性,引入Smith 预估器,使得闭环系统的特征方程中不含有-5s e 项。
Smith 纯滞后补偿的计算机控制系统:图 2.上图所示ZOH 为零阶保持器,传递函数为:se s G Tsh --1)(=,并且有:lT =τ(l为大于1的整数,T 为采样周期)。
由已知可知, 1.0T s =,则551l Tτ===。
2.负反馈调节器D(z)的确定D(z)为负反馈调节器,通常使用PID 控制规律。
使用扩充响应曲线法对数字PID 控制器进行参数整定。
扩充响应曲线法是在模拟PID 控制器响应曲线法的基础上推广应用到数字PID 控制器参数整定的方法。
扩充响应曲线法是用于具有纯滞后的一阶对象,由前面分析和已知: 1.0T s =,5τ=,5l =,1m T =,因此依据课本128页表4.2扩充响应曲线法整定PID 参数表选择数字PID 参数计算公式,由于1=0.25Tτ=,则选择控制度为1.20,控制规律为PI 控制,因此选定PI 参数为:0.78()pmK T τ=3.60iT τ=所以有:0.156p K = 18i T = 则控制器的传递函数为:i 110.1560.00867()(1)0.156(1)T 18p s D s K s s s+=+=+=⋅ 将得到的模拟控制器用一阶后向差分法离散化得到:1-1-1--1-10.7-717.0)-1(1|)()(1-z z z T T K s D z D i p Tz s =⋅+===】【 3.Smith 补偿器)z D (τ的确定Smith 纯滞后补偿的计算机控制系统的框图:图 3.sT Ks G m O ⋅+=1)( lT ≈τ spes G s G τ-)()(=s m Tsso h e s T s e K e s G s G s G ττ---)1()-1()()()(+==)-1)(()(-s p e s G s D ττ=)-11--11)(-1)(z -K(1 ])1(1[)-1)(z -K(1 )]-1()1()-1([)]([)(1--1--1--1---z ezz s T s Z z e s T s e K Z s D Z z D mT T lm ls m Ts =+=+==τττ令mT -T ea =,)-1(-mT T eK b =则有1--1--1)-1()(az z bz z D l =τSmith 预估器(纯滞后补偿器)的框图:图 4.)-1()()(-1l z z C z C =)()()az -(1)()z -(1c(k)1-11-1-l k u bz k c k c ==最后解得)1-()1-()()-(-)()(1111k ac k bu k c l k c k c k c +==由上一步所得的数据: 1.0T s =,5τ=,5l =,1m T =,12K =解得如下数据:1---110.368mT T a ee e ====1--1(1-)12(1-)7.584mT T b K e e ==⨯=则-1-5-17.584(1-)()1-0.368z z D z zτ=1111()()-(-5)()7.584(-1)0.368(-1)c k c k c k c k u k c k ==+由此可得到:11()7.584(-1)0.368(-1)-(-5)c k u k c k c k =+由此可见,Smith 补偿器的差分方程有1(-5)c k 项,即存在滞后5拍的信号,因此产生纯滞后信号对纯滞后补偿控制是至关重要的。
大纯滞后过程特性Smith预估控制摘要:Matlab 是一套高性能的数值计算和可视化软件。
它集数值分析、矩阵计算、信号分析与图形显示为一体,构成的一个方便的、界面友好的用户环境。
历经二十几年的发展和竞争,现已成为国际公认的最优秀的科技应用软件。
Matlab 最突出的特点就是简洁、它用直观的、符合人们思维习惯的代码、代替 C 语言和 FORTRAN 语言的冗长代码。
为此,Matlab 获得了对应用学科的极强适应力。
在国内外高校、Matlab 已成为大学生,硕士生、博士生必须掌握的基本技能。
在设计研究学位和工业部门,Matlab 已经成为研究和解决各种具体工程问题的一种标准软件。
Matlab 软件广泛用于数字信号分析,系统识别,时序分析与建模,神经网络、动态仿真等方面有着广泛的应用。
利用Matlab 这个最优秀的科技软件,把计算机技术与信号分析紧密地结合起来,对信号进行分析处理仿真研究,经实例验证,取得了非常好的效果,具有一定的实用价值。
本文控制系统为研究主体,提出一种 Smith 预估控制算法,通过设计自适应非线性反馈回路来自适应调节参数,从而满足对象参数大幅度变化的要求。
关键词:Matlab;纯滞后;Smith 预估控制器;SimulinkPure time-delay system control algorithm of SmithAbstract:Matlab is a software.of high performance of numerical calculation and visualization It get numerical analysis, calculation and signal analysis and graphic display together, constitute a convenient, interface, user friendly environment. After 20 years of development and competition, has become internationally recognized the best technology application software. The most prominent feature of Matlab is concise, it use the people's thinking and habits of the visual code, instead of C language and FORTRAN language lengthy code.So, Matlab acquire the subject of application for science. Matlab,has become acollege students’, masters’ or doctors’ basic skills which must be grasp of both at home and abroad ,. In the design research degree and industrial department, Matlab has become the research and solve specific engineering problems are a standard software. Matlab software widely used in digital signal analysis, system identification, timing analysis and modeling, neural network, dynamic simulation, etc in a wide range of applications. The best use of Matlab software technology, computer technology and signal analysis closely together, the signal analysis simulation, and achieved very good results since it has certain practical value. This control system as a main body of research, and put forward a kind of Smith prediction control algorithm, and adapt to adjust the parameter through the design adaptive nonlinear feedback loop, and meet the requirements of an object parameter changes greatly.(1)由(3)(1)由 (3)(4)(5)②具有纯滞后环节对控制效果的影响4滞后时间为10,PI参数保持不变,阶跃输入信号可见使用整定的控制器无法正常工作。
史密斯预估控制策略在厚规格轧制中的应用史密斯预估控制(Smith Predictor Control)是一种经典的控制策略,主要用于处理存在传输延迟的系统。
在厚规格轧制中,轧机控制系统面临着多种挑战,包括传输延迟、不确定性和非线性。
史密斯预估控制策略可以帮助解决这些挑战,并改善轧机生产性能。
在厚规格轧制中,通常需要对板材实施厚度控制。
然而,由于传输延迟的存在,控制器接收到的输入信号可能已经过时,导致控制器无法实时调整输出。
史密斯预估控制策略通过预估被控对象的输出,使得控制器能够更准确地估计未来的状态,并相应地调整输出信号。
这种预估可以通过传输延迟和系统模型来实现。
首先,需要建立被控对象的数学模型。
该模型需要考虑到厚规格轧机的物理特性和传输延迟。
通常采用状态空间模型或传递函数模型来描述轧机控制系统。
然后,根据模型,使用史密斯预估器来预估该系统的未来状态。
史密斯预估器由两部分组成,即传输函数预估器和状态预估器。
传输函数预估器根据已知的传输延迟和系统模型预估未来的输出。
状态预估器则根据传输函数预估器的输出以及系统模型预估未来的状态。
两者结合起来,可以提供一个准确的未来状态估计值,从而使控制器能够及时调整输出。
在史密斯预估控制策略中,控制器的设计也非常关键。
控制器需要根据实时的状态估计值和期望的输出信号来计算出最优的控制输出。
常用的控制器设计方法包括PID控制和模型预测控制。
PID控制是一种经典的控制方法,通过调整比例、积分和微分增益来实现控制目标。
模型预测控制则是在史密斯预估的基础上,通过优化控制计算来实现优化控制。
在厚规格轧制中,史密斯预估控制策略的应用可以带来多项优势。
首先,它可以处理传输延迟和不确定性,提高控制系统的鲁棒性和稳定性。
其次,它可以提供准确的未来状态预测,使控制器能够及时调整输出信号,从而实现更好的控制性能。
此外,史密斯预估控制还可以适应非线性系统,并根据实际情况进行调整和优化。
总之,史密斯预估控制策略在厚规格轧制中具有广泛的应用前景。
0 引言时滞现象常产生于化工、轻化、冶金、计算机网络通讯和交通等系统中[1,2]。
就控制系统而言,时滞是指作用于系统上的输入信号或控制信号与在它们的作用下系统所产生的输出信号之间存在的时间上的延迟,当时滞较大时,将会使系统中的被调量不能及时反映控制信号的作用;另外,当被控对象受到干扰而使被调量改变时,控制器产生的控制作用不能及时有效地抑制干扰的影响,从而导致较大的超调量和较长的调节时间,甚至产生不稳定。
因此,大时滞系统一直受到人们关注,成为目前过程控制研究领域的一个重要课题。
过程控制中,通常用过程纯滞后时间常数和系统时间常数之比来衡量过程时滞。
当τ/T≤0.3时,称为一般时滞过程,过程比较容易控制,常规PID控制就能收到良好的控制效果;当τ/T>0.3时,称为大时滞过程,需要采取特殊的高级控制方法,其控制难度随τ/T的比值增加而增加。
本文分析了在过程控制中广泛采用的大时滞过程控制算法——Smith预估补偿法,即Smith预估器,并重点讲述了其改进算法——双自由度Smith预估器,最后进行了仿真。
仿真结果表明该改进算法是可行的。
1 传统Smith预估器传统Smith预估器实质上是一种模型补偿控1.1 Smith预估控制基本思路Smith预估控制是瑞典科学家Smith于1957年提出的一种解决时滞系统控制问题的预估控制方法,其控制基本思路是预先估计出过程在基本扰动下的动态特性,然后由预估器进行补偿控制,使被延迟了的被调量提前反映到调节器,并使之动作,以此来减小超调量与加速调节过程[3]。
1.2 Smith预估控制补偿算法引入补偿环节Gk(s)后的闭环系统方框图如图1所示。
其中,Gc(s )e-τσ表示实际过程,Gk(s)表示系统一般PID调节器。
由图1可知系统闭环传递函数为引入补偿环节Gk (s)后,希望系统闭环传递函数的分母不再含e-τσ项,即要求1+Gc(s )Gk(s )+Gc(s )Gk(s )e-τσ=1+Gc(s)Gp(s) (2)即Gk(s)=(1-e-τσ)Gp(s) (3)将式(3)代入图1便可得到图2所示的传统连续Smith预估器方框图。
史密斯预估补偿控制及matlab仿真
史密斯预估补偿控制是一种常用的控制方法。
在控制系统中,史
密斯预估补偿器通过对系统进行预估来消除系统的时滞。
这种技术主
要适用于具有较长时滞的控制系统,如化工系统和电力系统。
Matlab是一种优秀的数学软件,可用于分析和仿真控制系统。
在史密斯预估补偿控制中,Matlab可以用于实现控制系统的建模和仿真。
控制系统的建模包括将系统的物理过程转化为数学方程。
这些方
程可以描述系统的行为和特性。
通过使用Matlab,可以轻松地将这些
方程转化为计算机可读的形式,并用于系统的仿真。
控制系统的仿真可以帮助工程师更好地理解系统的行为和特性。
通过在Matlab中设置控制算法并输入系统的参数,可以模拟系统的行为。
这可以帮助设计者优化控制算法并测试其性能。
总之,史密斯预估补偿控制及其在Matlab中的仿真是现代控制
工程师的重要研究内容。
它们使得设计者能够更好地理解和优化控制
系统的行为和性能。
华北电力大学实验报告实验名称: Smith预估控制算法设计仿真实验课程名称:计算机控制技术与系统学生姓名:学号:专业班级:Smith 预估控制算法设计仿真实验二、实验目的在控制算法学习的基础上,根据给定对象特性设计smith 预估控制器算法,并利用Matlab 软件进行仿真实验,同时与PID 算法控制算法进行比较,加深对该控制算法的掌握和理解。
三、实验仪器MATLAB R2014a四、实验内容设广义被控对象为:1011()()()1Ts s se e H s G s G s e s T s ττ----==⋅+ 控制系统框图为:T取T=1、τ=2、T 1=2.88,经采样(T=1s )保持后,其广义对象z 传递函数为00.2934()0.7066G z z =-, 而2s e -转换为2个单位迟延。
控制器参数:Kp=0.5,Ki=0.2,Kd=0。
五、实验要求:(1)Smith 预估控制算法,作给定值扰动和外部扰动响应实验,并绘制控制器输出P 和系统输出y 响应曲线。
(2)被控对象不变,采用理想PID 进行给定值扰动和外部扰动响应实验,并绘制控制器输出P 和系统输出y 响应曲线。
使用MATLAB 辅助设计软件simulink 仿真,构造了如下仿真结构图上半部是加入了Smith 预估控制算法的系统,下半部是没加入Smith 预估控制算法的系统。
广义对象z 传递函数为00.2934()0.7066G z z =-, 而2s e -转换为2个单位迟延。
程序为:sys=tf(1,[2.88,1],'inputdelay',2);sys1=c2d(sys,1,'zoh')sys1 =0.2934z^(-2) * ----------z - 0.7066Sample time: 1 seconds其中,上下半部系统控制器参数:Kp=0.5,Ki=0.2,Kd=0。
在上下半部系统30s时加入内部扰动,60s时加入外部扰动,得出控制器输出曲线如下:其中蓝色曲线是加入了Smith预估控制算法的系统,绿色曲线是没有加入Smith预估控制算法的系统。