焊接机器人-基本操作篇_200905
- 格式:pdf
- 大小:1.18 MB
- 文档页数:45
工贸企业焊接机器人操作规程范文第一章总则第一条为规范焊接机器人操作活动,确保操作人员的人身安全和设备的正常运行,制定本操作规程。
第二条本操作规程适用于工贸企业的焊接机器人操作活动,涵盖了操作人员的要求、基本操作流程、操作安全等方面的内容。
第三条焊接机器人操作人员应具备一定的焊接、机器人操作和安全知识,能够熟练掌握焊接机器人的操作技能。
并且必须接受企业组织的培训和考核,取得相应的证书。
第四条焊接机器人操作人员必须遵守国家和企业的相关法律法规以及操作规程,严格执行操作流程,确保人身安全和设备的正常运行。
第五条企业应定期组织对焊接机器人的操作人员进行技能培训和安全教育,提高操作人员的操作技能和安全意识。
第六条企业应定期对焊接机器人进行维护和保养工作,确保设备的正常运行。
第七条对于违反操作规程的行为,企业有权采取相应的纪律处分措施,并对操作人员进行重新培训。
第二章操作人员的要求第八条焊接机器人操作人员必须经过企业的培训和考核,并取得相应的证书,才能担任焊接机器人操作工作。
第九条焊接机器人操作人员必须熟悉焊接机器人的操作原理和工作流程,掌握机器人编程和程序调试的技能。
第十条焊接机器人操作人员必须具备一定的焊接知识,理解焊接工艺和焊接参数的意义,能够根据焊接工艺要求进行调试。
第十一条焊接机器人操作人员必须具备一定的安全知识,了解焊接机器人的安全设备和操作规程,能够正确使用和维护安全设备。
第十二条焊接机器人操作人员必须具备一定的应急处理能力,能够在发生紧急情况时,迅速有效地处理问题,保证人身安全和设备的正常运行。
第三章基本操作流程第十三条焊接机器人操作人员在进行焊接机器人操作前,必须佩戴防护眼镜、手套、耳塞等个人防护装备。
第十四条焊接机器人操作人员在进行焊接机器人操作前,必须检查焊接机器人的各项设备是否正常运行,检查焊接枪、电源、气源等设备是否完好。
第十五条焊接机器人操作人员在进行焊接机器人操作前,必须根据焊接工艺要求对焊接参数进行调整,并将调整过程记录在操作日志上。
焊接机器人操作规程
1、旋开气体阀门;新瓶要放半分钟,防止有存水。
2、进入机器人系统操作界面后,打开焊机电源;
3、将控制柜上主开关旋至"ON"位置,控制器开启。
4、对夹具的气路进行检查是否存在漏气等现象。
5、要生产的产件的焊接夹具放到工作台上,连接气动线和控制线
6、在示教器上检查通气键与送丝键,检查焊枪是否通气和送丝;
7、装上被加工件,注意安装时是否正确安装,后启动开始按钮
开始焊接
8、对首三件按照操作指导书进行自检填写生产件质量记录卡、工装/夹具设备运行卡。
9、焊接后对产件进行工人自检,包括表面质量,装配尺寸,同轴度等是否合格。
10、在焊接过程中出现质量波动,由焊接工艺员对程序进行修改,
其它人员不得更改,防止出现质量事故。
11、每班结束后进行末件自检,每箱产件填写随批卡,装箱入库。
12、关闭焊机、控制柜、等所有电源;
13、正常运行1.5个月需要对工作站进行500小时检查
14、喷嘴正常使用无焊渣、飞溅等杂物连续使用每100小时更换一次
15、导电嘴正常使用每20小时更换一次
16、示教器要摆放到指定位置,电缆线不得缠绕,显示面避免划伤
17、送丝导管必须及时清理避免断弧。
18、对作业区的杂物进行清理。
19、机器人各关节在维修后需要注油。
20、夹具在夹紧过程中工人的手远离夹具防止夹手。
21、机器人在运行过程中避免进入机器人工作范围内防止碰伤。
焊接机器人操作步骤一、机器人操作前的准备工作在进行焊接机器人操作之前,需要进行一些准备工作,以确保操作的顺利进行。
首先,需要检查机器人的各项设备是否正常运转,包括焊接枪、传感器、控制系统等。
其次,需要对焊接区域进行清洁,确保没有杂质或油污等。
最后,还需要设置好焊接参数,包括焊接电流、电压、速度等,以便机器人在操作过程中能够根据设定的参数进行工作。
二、机器人的基本操作步骤1. 启动机器人在进行焊接机器人操作之前,首先需要启动机器人。
按下启动按钮,机器人将开始运行,并进行自检程序,确保各项设备正常工作。
2. 设置焊接路径在机器人启动后,需要设置焊接路径。
根据焊接工件的形状和要求,程序员可以通过控制系统设置机器人的运动轨迹,以便机器人能够按照设定的路径进行焊接工作。
3. 进行焊接操作设置好焊接路径后,机器人就可以开始进行焊接操作了。
机器人会根据设定的路径,将焊接枪移动到焊接点上方,并开始进行焊接。
在焊接过程中,机器人会根据设定的焊接参数,控制焊接枪的运动速度和焊接电流,以确保焊接质量和效率。
4. 监控焊接过程在焊接过程中,机器人会通过传感器实时监控焊接质量和工件的位置。
如果发现焊接质量出现问题,机器人会及时停止焊接,并进行报警提示,以便操作人员及时处理。
5. 完成焊接任务当机器人完成焊接任务后,会自动停止焊接并返回到初始位置。
同时,机器人会通过控制系统输出焊接结果和相关数据,供操作人员进行分析和评估。
三、机器人操作的注意事项1. 安全操作在进行焊接机器人操作时,需要注意安全。
操作人员应穿戴好防护装备,避免与机器人和焊接设备发生接触,以免发生意外伤害。
2. 定期维护机器人作为一种高精密设备,需要定期进行维护保养工作。
定期检查机器人的零部件是否磨损或损坏,及时更换或修理。
同时,还需定期清洁机器人和焊接设备,以保持其正常运行。
3. 参数调整在进行焊接机器人操作时,可能需要根据具体情况进行参数调整。
操作人员应根据焊接工件的材质、尺寸和要求,调整焊接参数,以确保焊接质量和效率。

一文看懂焊接机器人使用说明书,希望对各位有所帮助!1.前面板部件图(具体部件标示见表1)表1接线:将焊机的12芯航空插头母头与控制柜的12芯航空插头公头对插,并把正极线以及负极线接到如上图所示的13正极线端、12负极线端;把焊机的6芯航空插头公头与机器人本体母头连接。
气检:将船型开关10打到1进行气体检查,若焊枪枪头出气,则表示正常。
焊接:船型开关3打到0实芯档,船型开关4打到0焊丝1.0档,船型开关8打到1气保焊档,船型开关9打到1收弧档,船型开关10打到0焊接档。
2.后面板部件图1、接线:把电源线380V连接起来2、启动开关3、二氧化碳加热器必须要接控制柜使用说明书1、电源开启关闭步骤(图一)机器人控制柜前面板图示1.1电源开启步骤面板开关是控制柜电源总开关。
面板开关旋转至(ON),指示灯“CRP电源”灯亮,CRP 控制器有电。
后钥匙开关旋转至(开启),按下(启动电源)按钮,听见电气柜内交流接触器吸合的声音,电源指示灯亮,电气柜完全通电。
电源开启完毕。
1.2电源关闭步骤在电气柜完全通电,钥匙开关旋转至(关闭),听见电气柜内交流接触器断开的声音,电源指示灯熄灭。
控制柜一次电路断电,二次电路仍然有电。
面板开关旋转至(off),电气柜内完全断电。
面板开关是电气柜的总电源开关。
1.3急停按钮使用急停按钮是在紧急情况或机器人威胁到工作人员生命安全时,紧急按下急停按钮,电气柜一次电路断电,机器人紧急停止。
在非紧急情况下,禁止使用急停按钮。
或对本体结构,或伺服电机造成不可挽回的伤害。
2、变压器接线说明变压器入线段接入三相380(+10/-10)电源,电源不能有缺相,三相不平衡等情况。
以上情况可能造成机器人不可预估的故障,请核实后再接入。
(如下图)CRP示教器简要使用说明书1. 按键说明配图说明,可以更直观理解CRP的具体操作方法,方便记忆,以便为您提供更好的服务。
2. 模式选择说明3. 安全开关使用说明4. 手动各关节和坐标5.手动示教运行机器人6.示教编程步骤通过以上步骤,该实例程序创建完成。
机器人电焊机操作方法嘿,朋友们,今儿咱们来聊聊那机器人电焊机的操作大法,保证让你一听就懂,一学就会,跟玩儿似的!首先啊,咱们得给这位“钢铁侠”穿上衣服——那就是焊枪和焊材。
你得确保它们俩是最佳拍档,焊枪得干净利索,焊材得新鲜出炉,这样才能擦出爱的火花嘛!一、开机预热,咱们得慢慢来1.1 轻轻按下那绿色的“启动”键,就像给老朋友一个温暖的拥抱。
别急,机器人电焊机也得有个热身的过程,它得缓缓睁开眼,瞅瞅这世界。
1.2 这时候,屏幕上的小灯开始闪烁,就像夜空中最亮的星,告诉你:“嘿,我醒啦!”这时候,你可以给它调调参数,比如电流大小、焊接速度,让它知道你的需求。
二、编程设定,让机器人懂你心2.1 编程这事儿,听起来高大上,其实就像教小孩画画一样简单。
你只需在触摸屏上点点画画,告诉机器人:“这里要这样焊,那里要那样走。
”它聪明着呢,一学就会。
2.2 举个例子,你想焊个“一”字型的焊缝,就画条直线;想焊个“之”字型的,就画个波浪线。
机器人一看就懂,立马执行得漂漂亮亮。
2.3 别忘了检查一遍程序,确保没有遗漏或错误。
毕竟,咱们可是要追求完美的焊接效果嘛!三、实战操作,见证奇迹的时刻3.1 好了,一切准备就绪,咱们可以开始实战了。
把焊件放到指定位置,就像给机器人摆好餐桌一样。
3.2 按下“开始”键,机器人就像接到了命令的士兵一样,迅速行动起来。
焊枪在焊件上跳跃、旋转,火花四溅,就像在表演一场精彩的舞蹈。
3.3 你只需站在一旁,悠闲地喝着茶,看着机器人忙碌的身影。
不一会儿,一条完美的焊缝就出现在你眼前了。
这时候,你是不是会忍不住感叹:“哇塞,这机器人真是太厉害了!”四、收尾工作,别忘了给它点个赞焊接完成后,别忘了给机器人做个简单的清洁和保养。
就像咱们干完活要洗手一样,机器人也需要保持干净整洁。
这样它才能更长久地为我们服务嘛!最后啊,别忘了给这位“钢铁侠”点个赞。
它可是咱们的好帮手呢!有了它,咱们的焊接工作变得更加轻松、高效、完美。
机器人焊接操作规程内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,用于工业自动化领域。
为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。
焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
点焊机器人的焊接装备,由于采用了一体化焊钳,焊接变压器装在焊钳后面,所以变压器必须尽量小型化。
对于容量较小的变压器可以用50Hz工频交流,而对于容量较大的变压器,已经开始采用逆变技术把50Hz工频交流变为600~700Hz交流,使变压器的体积减少、减轻。
变压后可以直接用600~700Hz交流电焊接,也可以再进行二次整流,用直流电焊接。
焊接参数由定时器调节,参见图1b。
新型定时器已经微机化,因此机器人控制柜可以直接控制定时器,无需另配接口。
点焊机器人的焊钳,通常用气动的焊钳,气动焊钳两个电极之间的开口度一般只有两级冲程。
而且电极压力一旦调定后是不能随意变化的。
近年来出现一种新的电伺服点焊钳,如图4所示。
焊钳的张开和闭合由伺服电机驱动,码盘反馈,使这种焊钳的张开度可以根据实际需要任意选定并预置。
而且电极间的压紧力也可以无级调节。
这种新的电伺服点焊钳具有如下优点:1)每个焊点的焊接周期可大幅度降低,因为焊钳的张开程度是由机器人精确控制的,机器人在点与点之间的移动过程、焊钳就可以开始闭合;而焊完一点后,焊钳一边张开,机器人就可以一边位移,不必等机器人到位后焊钳才闭合或焊钳完全张开后机器人再移动;2)焊钳张开度可以根据工件的情况任意调整,只要不发生碰撞或干涉尽可能减少张开度,以节省焊钳开度,以节省焊钳开合所占的时间。
焊接机器人操作流程一、准备工作焊接机器人操作前,首先需要进行一系列的准备工作,包括检查设备是否完好、确认焊接工件的位置和角度、调整焊接参数等。
1. 检查设备:确保焊接机器人及其相关设备完好,包括焊枪、焊丝、气体等。
2. 确认工件位置:根据焊接图纸或指示,确认工件的位置和角度是否正确,调整焊接机器人的位置。
3. 调整焊接参数:根据焊接材料和工件的要求,调整焊接电流、焊接速度、焊接角度等参数。
二、操作步骤在完成准备工作后,按照以下步骤进行焊接机器人的操作:1. 启动机器人:按照操作手册上的指示,启动焊接机器人系统,检查各项功能是否正常。
2. 定位工件:将工件放置在焊接机器人工作台上,并根据工件的要求进行角度和位置的调整。
3. 设定程序:根据焊接工艺要求,在机器人系统中设定相应的焊接程序,包括焊接路径、时间、速度等参数。
4. 运行机器人:启动焊接机器人,根据预设的程序进行焊接操作,确保焊接质量和速度达到要求。
5. 监控情况:在焊接过程中,定时检查焊缝的质量和工件的位置,及时调整机器人的操作参数。
6. 停止机器人:待焊接完成后,及时停止机器人操作,关闭系统,清理现场并保存相应的焊接数据。
三、安全注意事项在进行焊接机器人操作时,需要牢记以下安全注意事项,确保操作人员及设备的安全:1. 穿戴防护用具:操作人员需穿戴防护服、手套、眼镜等防护用具,避免受到火花、烟尘等伤害。
2. 遵守操作规程:严格按照操作手册上的规程进行操作,避免误操作导致事故发生。
3. 定期维护保养:定期对焊接机器人进行维护保养,确保设备的正常运转和安全使用。
4. 防止火灾:避免在易燃物附近进行焊接操作,及时清理工作台和周围杂物,防止火灾发生。
通过以上步骤和安全注意事项,焊接机器人的操作流程能够达到高效、安全的目的,为生产生活带来便利和保障。
愿每位操作人员都能遵守规程,提高操作技能,确保焊接质量和安全生产。
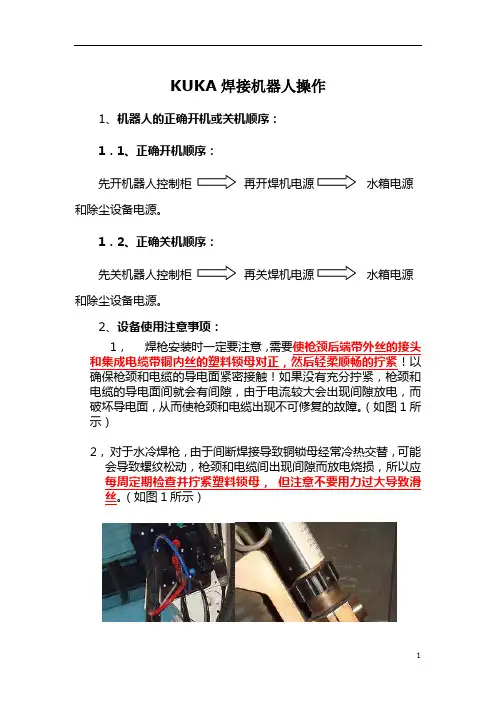
KUKA焊接机器人操作1、机器人的正确开机或关机顺序:1.1、正确开机顺序:先开机器人控制柜再开焊机电源水箱电源和除尘设备电源。
1.2、正确关机顺序:先关机器人控制柜再关焊机电源水箱电源和除尘设备电源。
2、设备使用注意事项:1,焊枪安装时一定要注意,需要使枪颈后端带外丝的接头和集成电缆带铜内丝的塑料锁母对正,然后轻柔顺畅的拧紧!以确保枪颈和电缆的导电面紧密接触!如果没有充分拧紧,枪颈和电缆的导电面间就会有间隙,由于电流较大会出现间隙放电,而破坏导电面,从而使枪颈和电缆出现不可修复的故障。
(如图1所示)2,对于水冷焊枪,由于间断焊接导致铜锁母经常冷热交替,可能会导致螺纹松动,枪颈和电缆间出现间隙而放电烧损,所以应每周定期检查并拧紧塑料锁母,但注意不要用力过大导致滑丝。
(如图1所示)①3, 如果在电缆法兰处出现漏水现象,请及时检查是否正确安装枪颈;如果枪颈电缆的接触面已经出现损坏,请及时送厂家维修,切忌将水箱关闭继续使用,否则会出现不可修复的损坏!4, 对水冷焊枪工作时要保证充分冷却,TBi 水冷焊枪要求在2bar 压力下,水流达到1.6L/min-2.0 L/min ;请经常检查水箱、通水管道和水质,并每3个月定期更换水箱内冷却液体(蒸馏水,冬季加防冻液)。
(如图2所示)②5, 清枪站需要定期维护:清枪站一定要使用干燥清洁的压缩空气,并每周拧开气动马达下面的胶木螺丝放水以免使转轴生锈影响转动;移动轴每月注油一次;每周对设备进行清扫;每周检查一次硅油瓶中的硅油。
(如图3所示)此处注意定期检查有无松动!!! 此处每周注意拧下清洗内部水位低于此红色标记时加水口(加纯净水、蒸③6, 每次使用焊枪前后,请检查喷嘴、导电嘴、导电嘴座、气体分流器、绝缘垫片、送丝管、导丝管等耗材是否正确安装及完好,有问题请及时更换。
(如图4所示)④7, 如遇送丝不畅,请更换送丝管、导丝管等,并检查送丝机的送丝轮,压力过小会影响送丝,压力过大会伤害焊丝表面,影响引弧稳定。
焊接机器人操作焊接机器人是一种自动化设备,能够通过程序进行操作,以完成焊接工作。
与人工焊接相比,焊接机器人具有操作简便、生产效率高等优点,并且能够在复杂环境中进行焊接,保证焊缝质量。
在工业领域,焊接机器人已经被广泛应用。
本文将重点探讨焊接机器人的操作方法和技巧。
一、焊接机器人的组成部分焊接机器人主要由机械结构、控制系统和焊接系统三部分组成。
其中,机械结构部分包括机身、关节、传动装置、末端执行机构等组成,控制系统部分包括计算机、控制器等传感器、执行机构、编程界面等组成,焊接系统部分包括电源、焊枪、气管、冷却器等组成。
二、焊接机器人的操作步骤1.准备工作在进行焊接操作之前,需要对焊接机器人进行检查和维护,并调整机器人的零点、姿态、焊枪等参数。
同时,需要备好焊接所需的材料和工具,如电缆、电极、电源等。
2.编写程序编写焊接程序是焊接机器人操作的关键环节,程序编写的质量直接影响到焊缝的质量。
编写焊接程序需要结合焊缝形式、焊接材料、焊接工艺等因素,制定适合的焊接路径和参数,并对编写的程序进行调试和优化。
3.安装焊接电极和工件在进行焊接之前,需要安装好焊接电极和工件,并调整焊枪的位置,保证焊接路径的连续。
同时,需要保证焊接区域干净无杂质,避免对焊接质量造成影响。
4.启动机器人在完成以上准备工作之后,可以启动焊接机器人进行操作了。
在操作过程中需要保持良好的工作状态,及时调整焊接参数和路径,检查焊缝的成形情况,确保焊接质量。
三、焊接机器人的技巧和注意事项1.保持机器人的稳定性在进行焊接操作时,需要保持机器人的稳定性,避免机器人的抖动或偏移。
同时需要结合焊接材料、工艺和焊缝形式等因素,制定适宜的焊接速度和电流,以保证焊接质量。
2.调整焊头的位置焊接机器人的焊头位置会直接影响焊缝的成形情况,需要进行适当调整。
在调整焊头位置时需要注意自由度和姿态角度,以避免对焊缝造成不利影响。
3.选择合适的焊接电极焊接电极的材料和种类直接影响到焊缝的质量和速度。
机器人焊接操作流程机器人焊机操作流程操作步骤:打开总电源开关(MGH074);全自动操作:①打开电源开关,打开送气阀门;②焊机工艺:上+左(按左全自动按钮),上+右(按右全自动按钮);注:绿色为启动,红色为急停。
工件切记摆放整齐。
③关机:关闭总电源,关闭送气阀门;注:电源切记要在机器完全停止以后才能关闭。
手动操作:①开启手动模式;②手柄左上角开关旋转至【ON】,主机全自动按钮【Auto】旋转至【T2】;③按手柄上【STEP】按钮,调整至左上角状态【→|→|单步】。
手柄按钮功能说明:常用按钮:【ENTER】确认【WIRE+】送丝【WIRE-】退丝【SELCT】退出【FEW】下一步【BWD】上一步【COORD】调节关节轴【+%】速度增加【-%】速度降低X/Y/Z轴方向调节:【-X】【+X】【-Y】【+Y】【-Z】【+Z】弧度调节:【-X←】【+X→】【-Y←】【+Y→】【-Z←】【+Z→】注:按钮需要按住手柄后方【黄色按钮】+【SHIFT】才可以操作。
编程:选择或者新件程序名;设置初始点位置坐标点【F1】,然后调节至第一个焊接点标点【F1】,再按【F2】起弧;调节至第二个焊接点【F3】中点,再调节至第三个焊接点【F4】终点;退至初始点标点【F1】。
注:【F1】为标点,初始点至起弧点需要多标点以避免发生碰撞,同理终点【F4】至初始点也需要设置多个标点。
手动模式调整至全自动模式:手柄按住【STEP】按钮调整至左上角【单步】状态;调节速度左上角到【100%】;手柄做删减开关旋转至【OFF】状态;主机旋转至【AUTO】状态;主机关机,旋转至【OFF】状态;打开主机,旋转至【ON】状态,设备开始自动模式运转。
焊接机器人系统操作规程焊接机器人系统操作规程一、凭证操作必须经学习,对机床结构性能熟悉了解并通过考试合格后,持有设备操作证者,才能单独操作此机床。
二、操作与维护 1 .严格执行该设备的技术操作规程2 .工作前检查与准备 1)焊机后板上焊接正极和负极插头是否联结牢固。
2)焊机冷却水是否低于规定的液面。
3)焊机面板的设定是否在正确的设定上。
4)第一级送丝机构(推丝)的压紧轮是否处于压紧位置,压紧刻度不能高于 2。
5)将机器人走到焊枪检查位置(MASTER 程序中的20________0 点),检查导电嘴状态是否完好,必要时进行更换;检查焊枪喷嘴中有无残留飞溅并予以清除;焊枪冷却水联结管接头是否闭锁。
6)清除机器人工作范围内的可能的障碍物以免发生碰撞。
7)检查保护气体瓶内压力是否低于可用压力(一般不得低于 1MP a),并及时更换新瓶;每班开工前或更换新瓶后要先进行试气,使气体充满从焊机到焊枪之间的管道。
8)检查变位器夹紧工件是否正常,气体供应是否正常。
3.开关机顺序 1)首先开启交流稳压电待电输出表指针稳定指示后再将机器人电柜通电;注意检查设备是否处于操作准备状态。
2)关机时首先将退出所选择的工作方式,同时操作方式选择开关置于 OFF 并拔出钥匙开关,然后关断机器人电柜电,再关断交流稳压电。
3)在冬季如果环境温度低于 5 度,不要关断交流稳压电以便机器人电柜内的加热器能正常工作。
4 .工作中操作注意事项 1)正常生产时应通过运行“MENU”程序和程序预选开关来选择某一工位的焊接。
2)操作者不能擅自改动工作程序或焊接参数表,以保证工艺的正确。
3)焊接中,操作者要保持对焊接过程的观察以便随时处理异常情况。
4)焊枪如有任何碰撞必须进行校正,以保证正确的几何尺寸使焊接能正常进行。
5)非操作有关人员不得进入机器人工作范围,以免发生不测。
6)不得用紧急停止开关来正常停止运行。
7)非维修人员不得开启机器人电柜门和进入示教器上的“SERVICE”菜单,以免导致故障。
焊接机器人安全操作规程(完整版)
必须得到焊接监督的批准,并且必须设置足够的防护措施,以保证人员的安全。
同时,必须在工作区域内设置明显的警示标识,以提醒人员注意安全。
4.1.2所有在工作区域内的人员必须佩戴符合要求的个人
防护装备,包括焊接面罩、防护手套、防护鞋等。
4.1.3禁止在机器人的工作区域内吸烟、喝饮料或食品等。
4.2设备的安全操作
4.2.1在操作机器人之前,必须检查设备是否正常运行,
如有异常情况必须及时报告并进行维修。
4.2.2操作机器人时,必须遵循使用说明书中的操作流程,并严格按照要求进行操作。
4.2.3禁止在机器人运行时进行任何调整或维修,必须在
停机状态下进行。
4.3工艺的安全执行
4.3.1在焊接过程中,必须严格按照工艺要求进行操作,
禁止随意更改工艺参数。
4.3.2焊接过程中必须保持焊接区域的清洁,并保证焊接区域内没有其他人员。
4.3.3焊接过程中,必须保持焊接区域的通风良好,以防止有害气体的积聚。
4.4应急措施
4.4.1在发生紧急情况时,必须立即停止机器人的运行,并采取相应的应急措施,如使用灭火器进行灭火等。
4.4.2在紧急情况得到解决之前,禁止重新启动机器人。
以上是本公司焊接机器人安全操作规程,希望所有操作人员认真遵守,确保焊接过程中的安全。
人员进入:未经许可非操作或工作人员不得进入焊接区域。
如需进入,必须佩戴合适的防护用品并有他人监护。
焊接机器人操作规程
《焊接机器人操作规程》
一、操作人员必须经过专业培训,持有相关证书
二、操作人员必须穿戴防护装备,包括防火服、防护眼镜和手套
三、在操作前必须检查焊接机器人设备的运行情况,确保没有故障
四、操作人员必须遵守操作规程,确保操作安全并避免事故发生
五、在进行焊接作业时,必须遵守相关的安全操作要求,确保周围没有其他人员进入作业区域
六、操作人员必须保持机器人设备和作业区域的环境清洁,防止发生意外事故
七、在操作过程中,必须及时检查焊接机器人设备的运行情况,确保设备正常运行
八、操作人员必须定期参加安全培训,了解最新的操作规程和安全要求
九、在操作结束后,必须及时关闭焊接机器人设备并进行必要
的清洁和维护工作
十、任何违反操作规程的行为都将受到相应的处理和处罚
通过遵守上述操作规程,可以有效保证焊接机器人的安全运行,避免发生事故,保护操作人员和设备的安全。
仅供参考[整理] 安全管理文书焊接机器人安全操作规程日期:__________________单位:__________________第1 页共4 页焊接机器人安全操作规程焊接机器人是生产的重点关键设备,操作人员必须要经过学习培训后,才能上岗使用。
操作者必须遵循如下操作规程一、操作前:1、必须进行设备开机前检点,确认设备完好才能开机工作。
2、检查电压、气压、指示灯显示是否正常,焊接夹具是否完好,工件安装是否到位。
3、检查清理现场,确保没有易燃易爆物品(如:油抹布、废弃的油手套、油漆、稀料等)。
4、两个夹具工位之间要有隔离板,确保遮光效果良好、到位。
焊接工位之间的通道必须保持通畅。
二、工作时:1、开机时必须确认机器人动作区域内没有其他工作人员2、穿戴长袖的工作服装、工作手套,带上防护眼镜,不要穿暴露脚面的鞋子,防止焊渣烫伤。
3、手指、毛发、衣物等不要靠近送丝装置的旋转部位,谨防卷入发生事故。
4、操作时要精细专心,工件要摆放到位,夹具工装的压紧装置必须压牢,取下焊接完毕的工件时必须远离焊接部位。
5、焊接工作进行时,严禁其他人员进入机器人动作范围区域。
6、如发现机器人工作时异常或焊接质量发生问题,立即停机报修,非专业人员不可擅动。
7、清理现场、擦拭机器人本体、调试,维护等工作,必须要在停机后方可进行。
第 2 页共 4 页三、停机后1、关闭气路装置,切断设备电源。
2、焊接区域内的焊瘤、尘渣,杂物打扫干净,擦净机器人本体、电气箱等部位。
做好设备的点检记录。
善意提示:使用心律起搏器的人员切勿靠近焊接区域2012年5月第 3 页共 4 页仅供参考[整理] 安全管理文书整理范文,仅供参考!日期:__________________单位:__________________第4 页共4 页。