现代控制理论 第7章
- 格式:pptx
- 大小:2.24 MB
- 文档页数:21
现代控制理论智慧树知到课后章节答案2023年下长安大学长安大学绪论单元测试1.下列语句中,不正确的是()。
A:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
B:现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统;C:20世纪50年代中期,空间技术的迅速发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题;D:在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法;答案:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
2.通过测量输出量,产生一个与输出信号存在函数关系的信号的元件称为()。
A:给定元件B:放大元件C:反馈元件D:比较元件答案:比较元件3.闭环控制系统的控制方式为()。
A:按扰动信号控制B:按输入信号控制C:按偏差信号控制D:按反馈信号控制答案:按偏差信号控制4.经典控制理论描述系统的数学模型是由高阶线性常微分方程演变来的传递函数,适合分析和设计下列哪种系统()A:非线性系统B:单输入单输出系统C:线性定常系统D:多输入多输出系统答案:单输入单输出系统;线性定常系统5.现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统()A:非线性系统B:线性时变系统C:多输入多输出系统D:线性定常系统答案:非线性系统;线性时变系统;多输入多输出系统;线性定常系统第一章测试1.系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的()A:对 B:错答案:对2.多输入-多输出系统的U-Y 间的传递函数为()A:错 B:对答案:对3.由一个状态空间模型可以确定多个传递函数。
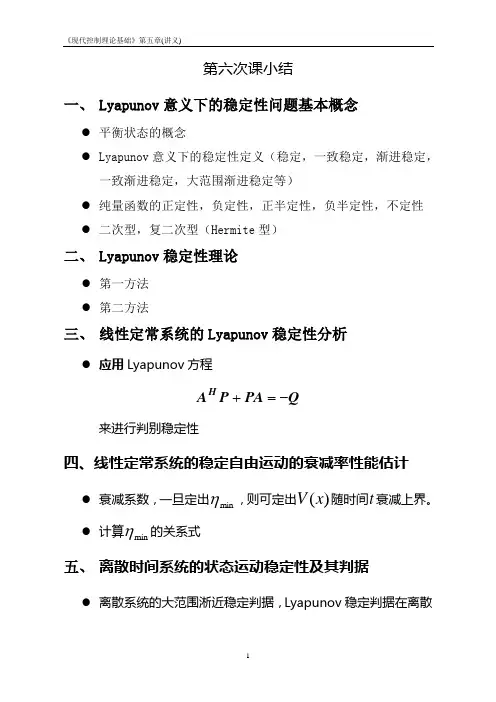
第六次课小结一、 Lyapunov 意义下的稳定性问题基本概念● 平衡状态的概念● Lyapunov 意义下的稳定性定义(稳定,一致稳定,渐进稳定,一致渐进稳定,大范围渐进稳定等)● 纯量函数的正定性,负定性,正半定性,负半定性,不定性 ● 二次型,复二次型(Hermite 型)二、 Lyapunov 稳定性理论● 第一方法 ● 第二方法三、 线性定常系统的Lyapunov 稳定性分析● 应用Lyapunov 方程Q PA P AH-=+来进行判别稳定性四、 线性定常系统的稳定自由运动的衰减率性能估计● 衰减系数,一旦定出min η,则可定出)(x V 随时间t 衰减上界。
● 计算min η的关系式五、 离散时间系统的状态运动稳定性及其判据● 离散系统的大范围淅近稳定判据,Lyapunov 稳定判据在离散系统中的应用六、 线性多变量系统的综合与设计的基本问题●问题的提法●性能指标的类型●研究的主要内容七、极点配置问题●问题的提出●可配置条件●极点配置算法5.2.5 爱克曼公式(Ackermann ’s Formula) 考虑由式(5.1)给出的系统,重写为Bu Ax x +=假设该被控系统是状态完全能控的,又设期望闭环极点为n s s s μμμ===,,,21 。
利用线性状态反馈控制律Kx u -=将系统状态方程改写为x BK A x )(-=(5.14)定义BK A A -=~则所期望的特征方程为)())((~11121=++++=---=-=+-**--*n n n nn a s a sa s s s s A sI BK A sI μμμ由于凯莱-哈密尔顿定理指出A ~应满足其自身的特征方程,所以0~~~)~(**11*1*=++++=--I a A a A a A A n n n n φ (5.15)我们用式(5.15)来推导爱克曼公式。
为简化推导,考虑n = 3的情况。
需要指出的是,对任意正整数,下面的推导可方便地加以推广。
现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
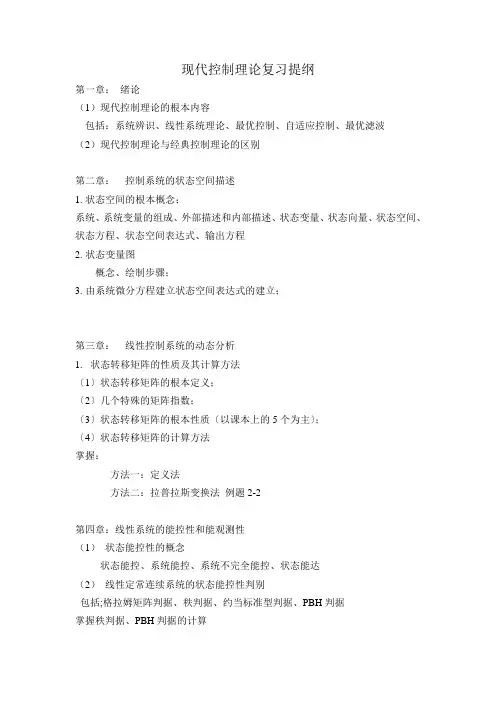
现代控制理论复习提纲第一章:绪论(1)现代控制理论的根本内容包括:系统辨识、线性系统理论、最优控制、自适应控制、最优滤波(2)现代控制理论与经典控制理论的区别第二章:控制系统的状态空间描述1.状态空间的根本概念;系统、系统变量的组成、外部描述和内部描述、状态变量、状态向量、状态空间、状态方程、状态空间表达式、输出方程2.状态变量图概念、绘制步骤;3.由系统微分方程建立状态空间表达式的建立;第三章:线性控制系统的动态分析1.状态转移矩阵的性质及其计算方法〔1〕状态转移矩阵的根本定义;〔2〕几个特殊的矩阵指数;〔3〕状态转移矩阵的根本性质〔以课本上的5个为主〕;〔4〕状态转移矩阵的计算方法掌握:方法一:定义法方法二:拉普拉斯变换法例题2-2第四章:线性系统的能控性和能观测性(1)状态能控性的概念状态能控、系统能控、系统不完全能控、状态能达(2)线性定常连续系统的状态能控性判别包括;格拉姆矩阵判据、秩判据、约当标准型判据、PBH判据掌握秩判据、PBH判据的计算(3)状态能观测性的概念状态能观测、系统能观测、系统不能观测(4)线性定常连续系统的状态能观测性判别包括;格拉姆矩阵判据、秩判据、约当标准型判据、PBH判据掌握秩判据、PBH判据的计算(5)能控标准型和能观测标准型只有状态完全能控的系统才能变换成能控标准型,掌握能控标准I型和II型的只有状态完全能观测的系统才能变换成能控标准型,掌握能观测标准I型和II 型的计算方法第五章:控制系统的稳定性分析〔1〕平衡状态〔2〕李雅普诺夫稳定性定义:李雅普诺夫意义下的稳定概念、渐进稳定概念、大范围稳定概念、不稳定性概念(3)线性定常连续系统的稳定性分析例4-6第六章线性系统的综合(1)状态反应与输出反应(2)反应控制对能控性与观测性的影响复习题1. 、和统称为系统变量。
2. 系统的状态空间描述由和组成,又称为系统的动态方程。
3. 状态变量图是由、和构成的图形。
4. 计算1001A-⎡⎤=⎢⎥⎣⎦的矩阵指数Ate__________。
前言本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。
本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。
由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。
书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。
由于时间比较仓促,可能存在错误,请读者批评、指正。
另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。
编者 2005年5月第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
现代控制理论智慧树知到课后章节答案2023年下哈尔滨工程大学哈尔滨工程大学绪论单元测试1.经典控制理论以单变量线性定常系统作为主要的研究对象,以时域法作为研究控制系统动态特性的主要方法。
A:对 B:错答案:错2.1892年俄国数学家李亚普诺夫发表了论文《运动稳定性的一般问题》,用严格的数学分析方法全面地论述了稳定性问题。
A:对 B:错答案:对3.现代控制理论以多变量线性系统和非线性系统作为研究对象,以时域法,特别是状态空间方法作为主要的研究方法。
A:对 B:错答案:对4.研究系统控制的一个首要前提是建立系统的数学模型,线性系统的数学模型主要有两种形式,即时间域模型和频率域模型。
A:对 B:错答案:对5.下述描述中哪些作为现代控制理论形成的标志()。
A:用于系统的整个描述、分析和设计过程的状态空间方法 B:随机系统理论中的Kalman滤波技术 C:最优控制中的Pontriagin极大值原理和Bellman动态规划 D:最优控制理论的产生答案:用于系统的整个描述、分析和设计过程的状态空间方法;随机系统理论中的Kalman滤波技术;最优控制中的Pontriagin极大值原理和Bellman动态规划第一章测试1.输入输出描述是描述系统输入变量和输出变量关系的模型。
A:对 B:错答案:对2.状态空间描述能完全表征系统的一切动力学特征。
A:对 B:错答案:对3.系统的状态是指能够完全表征系统时间域行为的一个最小内部变量组。
A:对 B:错答案:对4.系统的状态空间描述是唯一的。
A:错 B:对答案:错5.坐标变换是指将系统在状态空间的一个基底上的表征,化为另一个基底上的表征。
A:错 B:对答案:对6.当状态空间描述中的A矩阵有相同的特征值时,一定不能将其化成对角规范形。
A:错 B:对答案:错7.并联组合系统的传递函数矩阵为各并联子系统的传递函数矩阵之和。
A:对 B:错答案:对8.若两个子系统输出向量的维数相同,则可实现反馈连接。
《现代控制理论》习题第一章 控制系统的状态空间模型1.1 考虑以下系统的传递函数:656)()(2+++=s s s s U s Y试求该系统状态空间表达式的能控标准形和可观测标准形。
1.2 考虑下列单输入单输出系统:u y y yy 66116=+++试求该系统状态空间表达式的对角线标准形。
1.3 考虑由下式定义的系统:Cxy Bu Ax x=+=式中]11[,213421=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=C B A ,--试将该系统的状态空间表达式变换为能控标准形。
1.4 考虑由下式定义的系统:Cxy Bu Ax x=+=式中]011[,10030021101=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=C B A ,--试求其传递函数Y(s)/U(s)。
1.5 考虑下列矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0001100001000010A试求矩阵A 的特征值λ1,λ2,λ3 和λ4。
再求变换矩阵P ,使得),,,(diag 43211λλλλ=-AP P第二章 状态方程的解2.1 用三种方法计算下列矩阵A 的矩阵指数函数At e 。
1) ⎥⎦⎤⎢⎣⎡--=5160A; 2) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6116100010A2.2 计算下列矩阵的矩阵指数函数At e 。
1) ⎥⎦⎤⎢⎣⎡=0010A ; 2) ⎥⎦⎤⎢⎣⎡=1002--A ; 3) ⎥⎦⎤⎢⎣⎡-=0110A ; 4) ⎥⎦⎤⎢⎣⎡=1021A5) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=200010011A ; 6) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=210010001A ; 7) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=000100010A2.2 给定线性定常系统Ax x=式中⎥⎦⎤⎢⎣⎡--=2310A且初始条件为⎥⎦⎤⎢⎣⎡-=11)0(x试求该齐次状态方程的解x (t )。
2.4 已知系统方程如下[]xy u x x 11015610-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=求输入和初值为以下值时的状态响应和输出响应。
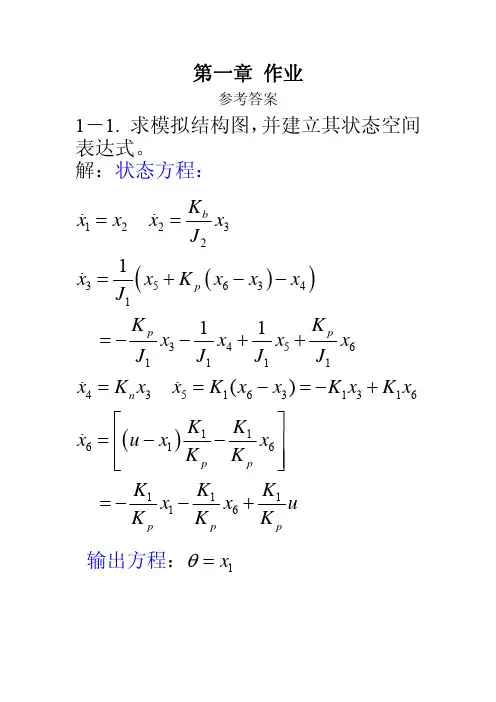
《现代控制理论》刘豹著(第3版)课后习题答案《现代控制理论》刘豹著(第3版)课后习题答案第一章习题答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令,则所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-3参考例子1-3(P19).1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式‘(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
第一章 控制系统的状态空间描述1-1 求图示网络的状态空间表达式,选取C u 和i 为状态变量。
RL +1-2 已知系统微分方程,试将其变换为状态空间表达式。
(1)u y y y y 2642=+++(2)u u y yy 237+=++(3)u u u y y yy 23745++=+++(4)u u u u y y y y 81786116+++=+++1-3试画出如图所示系统的状态变量图,并建立其状态空间表达式。
1-4 已知系统的传递函数,试建立其状态空间表达式,并画出状态变量图。
(1)61161)(232+++++=s s s s s s G (2)6513)(22++++=s s s s s G(3))3()1(4)(2++=s s s s G (4)13332)(232+++++=s s s s s s G1-5 已知系统233)()(2+++=s s s s U s Y ,试求其能控标准型和对角标准型。
1-6 已知系统传递函数,试用并联法求其状态空间表达式。
(1)61161)(23+++=s s s s G (2)2545)(23+++=s s s s G1-7 试求下列状态方程所定义系统的传递函数。
⎪⎪⎩⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21212121211001101142510x x y y u u x x x x1-8 试将下列状态方程化为对角标准型。
(1)u(t)x(t)(t)x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=106510(2)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=1751326712203010(3)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=01161161000101-9 试将下列状态方程化为约当标准型。
(1)u(t)x(t)(t)x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=102112(2)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=357213*********(3)u(t)x(t)(t)x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=100452100010第二章 线性控制系统状态空间表达式的解2-1 试求下列系统矩阵A 对应的状态转移矩阵。