力士乐压力表参数
- 格式:pdf
- 大小:328.24 KB
- 文档页数:12

rexroth柱塞泵技术参数摘要:1.简介2.rexroth 柱塞泵的工作原理3.rexroth 柱塞泵的技术参数4.rexroth 柱塞泵的应用领域5.rexroth 柱塞泵的优势和特点6.结论正文:正文1.简介rexroth 柱塞泵是一种液压泵,由德国博世力士乐公司生产。
它广泛应用于各种工业领域,例如工程机械、机床、船舶、航空等。
rexroth 柱塞泵以其高效率、高可靠性、高压能力和低噪音等特点而著名。
2.rexroth 柱塞泵的工作原理rexroth 柱塞泵通过柱塞在缸体内的往复运动来产生压力。
当柱塞向一个方向运动时,缸内的体积增大,产生负压,使液体吸入缸体。
当柱塞向另一个方向运动时,缸内的体积减小,产生高压,使液体从缸体排出。
这种工作方式连续运动后就形成连续供油。
3.rexroth 柱塞泵的技术参数rexroth 柱塞泵的技术参数包括排量、最高压力、流量等。
根据不同型号,参数有所不同。
例如,A2F55R1P3 柱塞泵的排量为55,最高压力为35 兆帕。
4.rexroth 柱塞泵的应用领域rexroth 柱塞泵广泛应用于各种工业领域。
例如,在工程机械领域,它可用于挖掘机、摊铺机、压路机等设备的液压系统。
在机床领域,它可用于机床的液压传动系统。
在船舶和航空领域,它可用于船舶推进器、飞机起落架等设备的液压系统。
5.rexroth 柱塞泵的优势和特点rexroth 柱塞泵的优势和特点包括高效率、高可靠性、高压能力和低噪音。
此外,它还具有出色的流量控制性能和良好的响应特性。
6.结论rexroth 柱塞泵是一种高性能的液压泵,具有广泛的应用领域和优势。
压力表型号表示方法和技术参数介绍发布时间:2012-4-23 19:06:20压力表型号表示方法有哪些?压力表型号代表什么意思?压力表技术参数是什么?压力表当被测介质通过接口部件进入弹性敏感元件(弹簧管)内腔时,弹性敏感元件在被测介质压力的作用下其自由端端会产生相应的位移,相应的位移则通过齿轮传动放大机构和杆机构转换为对应的转角位移,与转角位移同步的仪表指针就会在示数装置的度盘刻线上指示出被测介质的压力。
压力表型号表示方法:Y-□□ 第一个字母Y表示压力表;横杠后面第一个框内为数字表示表壳公称直径(50,60,100,150);第二个框内为字母表示结构形式(无代号表示径向无边;Z轴向无边;ZQ轴向带前边T径向带后边) 。
一般压力表适用测量无爆炸,不结晶,不凝固,对铜和铜合金无腐蚀作用的液体、气体或蒸汽的压力。
Y□-□□ 第一个字母Y表示压力表;第一个框内为字母则表示该表的型式;横杠后第一个框内为数字,数字表示表壳公称直径;最后面的框内为字母,表描述。
YA-100、150氨压力表,YB-150A、150B系列精密压力表,YE-100、150系列膜盒压力表,YE-100B YE-150系列不锈钢膜盒压力表Y□□-□□ 第一个字母Y表示压力表; 第一个框内为字母则表示该表的结构型式;第二个框内为字母则表示其它功能性质或形式;横杠后第一个框内为数字,数字表示表壳公称直径;最后面的框内为字母,表描述。
YEJ-101、121矩形膜盒压力表,YMC、MN系列卫生型隔膜压力表,YML、MF隔膜压力表,YPF膜片压力表,YTN、YTN-B系列耐震压力表,YTT-150型差动远传压力表,YTZ-150电阻远传压力表.压力表技术参数:包括精确度等级;外径;径向,轴向1.压力表精确度等级:是以它的允许误差占表盘刻度值的百分数来划分的,其精度等级数越大允许误差占表盘刻度极限值越大。

力士乐伺服参数设置摘要:文中简述了力世乐ECODRIVE03 伺服驱动系统通过并行接口进行位置块(组)操作模式(position block mode)的控制原理,并例举了与伺服驱动相关的故障及其解决方法。
数控机床控制中西门子、法那科伺服驱动系统应用较为普遍,而力世乐ECODRIVE03 伺服系统亦广泛地应用于机械制造、印刷造纸业、食品包装及集装总装等领域。
拥有FWA-ECODR3-SMT-02VS-MS 等系列硬件的ECODRIVE03 伺服系统通过串行、模拟、并行接口,及对系统标准参数(S 型参数)生产参数(P 型参数)的设置,可完成扭矩控制、速度控制、位置控制、插补控制、点动、位置块(组)及步进电机等模式的操作。
且系统带有测量、驱动、暂停、模拟输入/输出、数字输入/输出等多种基本功能并拥有完备的诊断功能。
下面介绍力世乐伺服系统的位置块(组)操作模式的控制原理。
1 位置块(组)操作模式的控制原理1.1 概述位置块(组)操作模式的控制原理位置块(组)操作模式是伺服系统以设定的速度、加速度等参数驱动电机运行到已在程序中预设的目标值的位置控制。
系统根据所处理的不同工艺过程(加工区域)最多可以设置64 个位置块(组)。
应用位置块(组)操作模式时,首先要对操作首要模式参数S-0-0032 进行设置,如设置为0000 0000 0011 х011 时,是通过编码器1 接口进行位置控制。
其中第3 位,bit3=0时代表位移滞后控制,bit3=1 时为无滞后控制;同时要将第二操作模式1 设置为点动模式,即设置参数S-0-0033 为1100 0000 0001 1011。
系统中与之相关的参数为:P-0-4006:加工块的目标位置值P-0-4007:加工块的速度值P-0-4008:加工块的加速度值P-0-4009:加工块的加加速度极值。
当设定为“0”时,极限值不起作用。
无论是绝对值还是相对值控制方式,P-0-4006、P-0-4007、P-0-4008、P-0-4009都有效,且每个参数都可最多设置为64 个数据,分别对应于0-63 数据块(组)的各个值。

力士乐A4V柱塞泵型号表示说明Rexroth力士乐柱塞泵A4V系列型号表票说明,具体如下介绍,希望对您的工作有帮助,同事你也可以来电咨询Rexroth力士乐产品,德国***产品供应。
Rexroth力士乐A4VSO系列泵型号说明:A4VS O 71 DR / 10 R - P P B 25 N00A4VS---斜盘式轴向柱塞变量泵:用于工业驱动,额定压力:35MPa,峰值压力:45MPa。
O---运行模式:泵,开式回路。
71---规格排量:40、71、125、180、250ml/r。
DR---控制结构:DG-两位控制,DR-恒压控制,DRG-远程恒压控制,DFR-压力/流量控制,DFR1-压力/流量控制,在X油路无小孔,DFLR-压力/流量/功率控制。
10---系列:10、22、30系列。
R---旋转方向:从轴端看,R-顺时针,L-逆时针。
P---密封件:P-带FKM轴封的NBR(丁晴橡胶,符合DIN ISO 1629)V-FKM(氟橡胶,符合DIN ISO 1629)。
P---轴端形式:P-DIN公制平键,Z-DIN花键。
B---安装法兰:(A-ISO 2孔,B-ISO 4孔,C-SAE 2孔,D-SAE 4孔)。
25---工作油口连接:(13-压力油口B 吸油口S 在侧面错开90°方向,SAE油口法公制固定螺钉;25-压力油口B 吸油口S 在侧面错开90°方向,SAE油口法公制固定螺钉,***压力接口B1在B对面一排油时用法兰堵塞)。
N00---轴伸:(N00-无辅助泵,无通轴驱动;K-通轴驱动)。
Rexroth力士乐A4VSO40柱塞泵系列技术参数:额定压力:35MPa1、排量:40ml/r;2、转速:2600r/min,当进口压力Pabs增加或排量减少及Vg3、流量:2600r/min时 104L/min,1500r/min时 60L/min;4、功率:2600r/min时 61Kw,1500r/min时 35Kw;5、扭矩:(△P=35MPa时)223Nm,扭矩(△P=10MPa 时) 64Nm;6、壳体容积:2L;7、重量:39Kg。

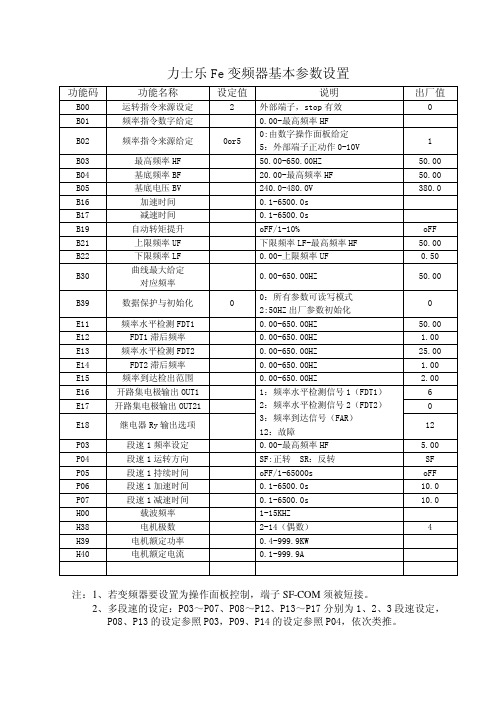
力士乐Fe 变频器基本参数设置功能码功能名称设定值说明出厂值B00 运转指令来源设定 2 外部端子,stop 有效 0 B01 频率指令数字给定 0.00-最高频率HF B02 频率指令来源给定 0or5 0:由数字操作面板给定 5:外部端子正动作0-10V 1 B03 最高频率HF 50.00-650.00HZ 50.00 B04 基底频率BF 20.00-最高频率HF 50.00 B05 基底电压BV 240.0-480.0V 380.0 B16 加速时间 0.1-6500.0s B17 减速时间 0.1-6500.0s B19 自动转矩提升 oFF/1-10%oFF B21 上限频率UF 下限频率LF-最高频率HF 50.00 B22 下限频率LF 0.00-上限频率UF 0.50 B30 曲线最大给定 对应频率 0.00-650.00HZ 50.00 B39 数据保护与初始化 0 0:所有参数可读写模式 2:50HZ 出厂参数初始化 0 E11 频率水平检测FDT1 0.00-650.00HZ 50.00 E12 FDT1滞后频率 0.00-650.00HZ 1.00 E13 频率水平检测FDT2 0.00-650.00HZ 25.00 E14 FDT2滞后频率 0.00-650.00HZ 1.00 E15 频率到达检出范围 0.00-650.00HZ2.00 E16 开路集电极输出OUT1 6 E17 开路集电极输出OUT21 0 E18 继电器Ry 输出选项 1:频率水平检测信号1(FDT1) 2:频率水平检测信号2(FDT2) 3:频率到达信号(FAR) 12:故障 12 P03 段速1频率设定 0.00-最高频率HF 5.00 P04 段速1运转方向 SF:正转 SR:反转 SF P05 段速1持续时间 oFF/1-65000s oFF P06 段速1加速时间 0.1-6500.0s 10.0 P07 段速1减速时间 0.1-6500.0s 10.0 H00 载波频率 1-15KHZ H38 电机极数 2-14(偶数) 4 H39 电机额定功率 0.4-999.9KW H40 电机额定电流0.1-999.9A注:1、若变频器要设置为操作面板控制,端子SF-COM 须被短接。
rexroth柱塞泵技术参数Rexroth柱塞泵是一种常用于工业设备和机械系统中的液压泵。
它具有高效、可靠、稳定的特点,被广泛应用于各个行业。
一、简介Rexroth柱塞泵采用先进的液压控制技术,通过柱塞在泵内的往复运动实现流体的输送。
它可以提供高压和高流量的液压功率,可满足各种复杂工况下的需求。
Rexroth柱塞泵分为定量泵和变量泵两种不同的类型,用户可以根据实际需求选择适合的型号和技术参数。
二、定量泵的技术参数1. 排量:定量泵的排量是指泵体在单位时间内输送的液体体积。
Rexroth柱塞泵的排量通常以毫升为单位,不同型号的定量泵具有不同的排量范围,例如10ml/r、20ml/r、30ml/r等。
2. 最高工作压力:定量泵的最高工作压力是指泵体能够承受的最大液压系统压力。
Rexroth柱塞泵的最高工作压力通常以兆帕(MPa)为单位,不同型号的定量泵具有不同的最高工作压力要求,一般在20MPa到35MPa之间。
3. 转向形式:定量泵的转向形式指的是泵体的转向方式,包括正转、反转和双向转等。
Rexroth柱塞泵常见的转向形式有A、B、E、F等不同的代码表示,用户在选择时需要根据具体应用场景和系统设计要求进行决策。
三、变量泵的技术参数1. 变量泵的调节范围:变量泵的调节范围是指泵体排量的调节范围。
Rexroth柱塞泵可根据不同的调节要求进行调整,调节范围通常为10%到100%,用户可以通过液压控制系统灵活地调整泵的输出量。
2. 最大连续工作压力:变量泵的最大连续工作压力是指泵体在连续工作状态下能够承受的最大液压系统压力。
Rexroth柱塞泵的最大连续工作压力通常在30MPa到35MPa之间,用户在选择时需要根据系统的使用要求和可靠性需求进行判断。
3. 控制方式:变量泵的控制方式是指泵体的调节方式,包括手动控制、自动控制和比例控制等。
Rexroth柱塞泵具有多种不同的控制方式,用户可以根据系统的功能需求和工作环境选择合适的控制方式。
rexroth柱塞泵技术参数一、I n t r o d u c t i o n柱塞泵是一种重要的液压元件,广泛应用于各个领域。
本文将详细介绍r ex ro th柱塞泵的技术参数,帮助读者更好地了解该泵的性能和适用范围。
二、技术参数1.泵型-r ex ro th柱塞泵现有多个型号,包括A2F、A4V、A6V等。
-不同型号的泵适用于不同工况和需求,具有各自的特点和应用领域。
2.排量-柱塞泵的排量是指单位时间内流经泵腔的液体体积。
-r ex ro th柱塞泵的排量范围从10m l/r到500ml/r不等,用户可根据具体需求选择合适的排量。
3.压力-柱塞泵的压力是指泵输出时所能提供的最大液压力。
-r ex ro th柱塞泵的工作压力通常可达到350ba r,满足大多数工业和机械设备的压力需求。
4.转速-柱塞泵的转速是指泵的输出轴转动的速度。
-r ex ro th柱塞泵具有可变转速范围,使其适用于不同工况和工作需求。
5.效率-柱塞泵的效率是指输入功率与输出功率之间的比值,也可以理解为转化液压能的能力。
-r ex ro th柱塞泵以其高效率而著称,能够提供稳定、高效的液压能源。
6.其他参数-r ex ro th柱塞泵还具有一些其他技术参数,包括最大工作温度、重量、尺寸等。
-这些参数对于选择合适的柱塞泵,以及与其他设备的配合和安装都具有重要意义。
三、应用领域-r ex ro th柱塞泵广泛应用于机械工程、冶金、船舶、农业、建筑工程等领域。
-其可靠的性能、高效的工作能力,使其成为液压系统中不可或缺的关键组成部分。
四、总结本文介绍了r ex ro th柱塞泵的技术参数,包括泵型、排量、压力、转速、效率等。
同时,还阐述了该泵的应用领域和重要性。
这些技术参数能够帮助用户选择合适的柱塞泵,并确保其在工作中发挥最佳性能。
力士乐伺服参数设置力士乐伺服是一种高性能的运动控制系统,广泛应用于机械设备、工业机器人、自动化生产线等领域。
伺服参数设置是使用力士乐伺服时必须进行的重要步骤,它决定了伺服的运动响应和控制精度。
下面将从伺服参数的基本概念、设置方法和常见参数进行详细介绍。
一、伺服参数的基本概念1.位置环参数:位置环是控制伺服电机位置的闭环控制器。
位置环参数包括比例增益、积分时间常数和微分时间常数。
比例增益用来调节伺服电机的位置响应速度,积分时间常数用来调节伺服电机的位置稳定性,微分时间常数用来调节伺服电机的位置抗干扰能力。
2.速度环参数:速度环是控制伺服电机速度的闭环控制器。
速度环参数包括比例增益、积分时间常数和微分时间常数。
比例增益用来调节伺服电机的速度响应速度,积分时间常数用来调节伺服电机的速度稳定性,微分时间常数用来调节伺服电机的速度抗干扰能力。
3.加速度环参数:加速度环是控制伺服电机加速度的闭环控制器。
加速度环参数包括比例增益、积分时间常数和微分时间常数。
比例增益用来调节伺服电机的加速度响应速度,积分时间常数用来调节伺服电机的加速度稳定性,微分时间常数用来调节伺服电机的加速度抗干扰能力。
二、伺服参数设置方法1.位置环参数设置:首先将比例增益设定为一个较大的值,然后逐渐减小直到出现振荡现象,然后将增益调整到刚好消除振荡,再微调增益,使得伺服电机的位置响应达到最佳。
积分时间常数和微分时间常数的设置原则和比例增益类似。
2.速度环参数设置:首先将比例增益设定为一个适中的值,然后逐渐增加直到出现振荡现象,然后将增益调整到刚好消除振荡,再微调增益,使得伺服电机的速度响应达到最佳。
积分时间常数和微分时间常数的设置原则和比例增益类似。
3.加速度环参数设置:首先将比例增益设定为一个较小的值,然后逐渐增加直到出现振荡现象,然后将增益调整到刚好消除振荡,再微调增益,使得伺服电机的加速度响应达到最佳。
积分时间常数和微分时间常数的设置原则和比例增益类似。