第五章 根轨迹分析法
- 格式:ppt
- 大小:1.47 MB
- 文档页数:58



自动控制原理孙优贤教材第一章:控制系统组成和概念控制系统是一种由多个元素和过程组成的整体,它的主要目的是通过调节输入和输出之间的关系,以达到特定的性能指标。
控制系统一般包括控制器、执行器、传感器和被控对象等组成部分。
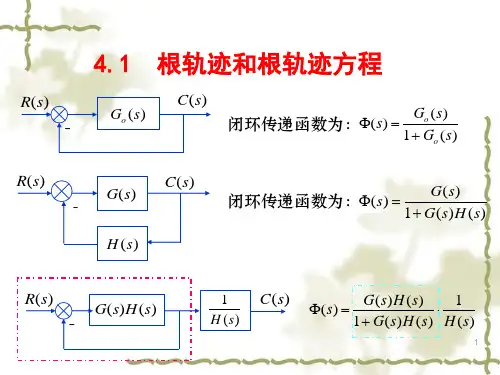
第二章:控制系统的数学模型控制系统的数学模型是用数学语言描述控制系统的方法,它可以帮助我们分析控制系统的性能和行为。
常用的数学模型包括传递函数模型、状态空间模型和Laplace变换模型等。
这些模型可以用来描述控制系统的动态特性,进行系统分析和设计。
第三章:控制系统的时域分析时域分析法是一种基于时间域的控制系统分析方法。
通过时域分析,可以了解控制系统的稳定性、响应速度、误差等性能指标,进而对系统进行优化设计。
第四章:频率特性分析法频率特性分析法是一种基于频率域的控制系统分析方法。
通过频率特性分析,可以了解控制系统的频率响应、相位和幅值等特性,进而对系统进行优化设计。
第五章:根轨迹分析方法根轨迹分析法是一种基于根轨迹的控制系统分析方法。
通过根轨迹分析,可以了解控制系统的稳定性、响应速度和阻尼比等性能指标,进而对系统进行优化设计。
第六章:采样控制系统采样控制系统是一种数字控制系统,它通过对模拟信号进行采样、量化、编码等处理,将其转化为数字信号进行控制。
采样控制系统的精度高、稳定性好、易于实现远程控制等优点,被广泛应用于工业自动化等领域。
第七章:状态空间方法状态空间法是一种基于状态空间模型的控制系统分析方法。
通过状态空间法,可以了解控制系统的动态特性和状态变量之间的关系,进而对系统进行优化设计。
状态空间法还可以用于控制系统的稳定性和鲁棒性分析等方面。
第八章:非线性系统分析非线性系统是指系统的输入和输出之间存在非线性关系的系统。
非线性系统的分析和设计比线性系统更为复杂,但非线性系统的应用范围更广泛。
非线性系统的分析方法包括相平面法、描述函数法等。
《根轨迹分析法》课件1. 课件简介根轨迹分析法是一种用于分析和设计反馈控制系统的方法,通过绘制系统的根轨迹来了解系统在不同参数下的稳定性和动态性能。
本课件将介绍根轨迹分析法的基本概念、方法和应用。
2. 课件内容2.1 根轨迹分析法的基本概念2.1.1 根轨迹的定义根轨迹是指在系统参数变化范围内,使闭环系统稳定的闭环极点轨迹。
2.1.2 根轨迹的性质(1)根轨迹是闭环极点在复平面上的轨迹,反映了闭环系统的稳定性。
(2)根轨迹的形状由系统开环传递函数的极点和零点决定。
(3)根轨迹的分布与系统参数有关,通过改变参数可以改变系统的稳定性和动态性能。
2.2 根轨迹分析法的方法2.2.1 绘制根轨迹的基本步骤(1)确定系统开环传递函数。
(2)画出开环传递函数的极点和零点。
(3)根据系统参数的变化,绘制出根轨迹。
(4)分析根轨迹的形状,判断闭环系统的稳定性。
2.2.2 根轨迹的绘制技巧(1)利用软件工具,如MATLAB,自动绘制根轨迹。
(2)手动绘制根轨迹时,注意利用对称性和周期性简化绘制过程。
2.3 根轨迹分析法的应用2.3.1 设计控制器通过分析根轨迹,可以确定控制器参数,使闭环系统具有所需的稳定性和动态性能。
2.3.2 系统优化根轨迹分析法可以帮助我们找到系统参数的最佳组合,从而优化系统的性能。
2.3.3 故障诊断分析根轨迹可以帮助我们发现系统中的故障,为故障诊断提供依据。
3. 课件总结本课件介绍了根轨迹分析法的基本概念、方法和应用。
通过学习本课件,您可以了解根轨迹分析法在控制系统设计和分析中的重要性,并掌握绘制根轨迹的基本方法。
希望这有助于您在实际工作中更好地应用根轨迹分析法。
科学性:1. 内容准确:课件内容基于控制理论的基本原理,准确地介绍了根轨迹分析法的概念、方法和应用。
2. 逻辑清晰:课件从基本概念入手,逐步深入到方法介绍和应用实例,逻辑结构清晰,易于理解。
3. 实例典型:课件中提供了控制系统的实例,帮助学习者更好地理解根轨迹分析法的应用场景。
第五章 根轨迹分析方法 自测题__参考答案5-1 设闭环系统的开环传递函数为2(5)()0(48)K s G s K s s s +=>++,请用相位条件检验下列S 平面上的点是不是根轨迹上的点,如果是根轨迹上的点,则用幅值条件计算该点所对应的K 值。
(1)(-1,j0);(2)(-1.5,j2);(3)(-6,j0);(4)(-4,j3);(5)(-3,j2.37)解: (1)是; K =5/4(2)是; K =5/4(3)不是根轨迹上的点。
(4)不是根轨迹上的点。
(5)是; K =7。
5-2 单位负反馈系统的开环传递函数为:()0(1)KG s K s Ts =>+,,若希望闭环系统所有特征根实部均小于-2,请绘制根轨迹草图确定T 的取值范围。
若再要求系统阻尼比ζ不小于0.5,请画出期望的特征根在S 平面上的分布范围。
解:分离点的位置是: 0<T<1/45-3 控制系统结构如图5-3所示,试由根轨迹的方法确定使闭环系统稳定的KK t 的取值范围。
解:系统开环传递函数为:()(0.251)t KG s s s KK =-+有2个开环极点:120, 4(1)t s s KK ==-由于K>0,故欲保证闭环系统稳定,只需要2个开环极点均位于S 左半平面即可 故101t t KK KK -<⇒>R (s )s )图5-3 控制系统示意图即只要满足条件 1t KK >。
5-4 单位负反馈系统的开环传递函数为:123()()()()()K s z G s s p s p s p +=+++其零、极点分布如图5-4所示,试采用根轨迹方法确定使系统稳定的K 的范围。
解:可以绘制根轨迹的概略图。
从+1、-1出发的2条根轨迹相向而行,在分离点离开实轴进入复域。
由已知的零极点分布容易判断,分离点一定是在左半平面。
渐近线与实轴的交点:-0.5,为平行于虚轴的垂直线容易看出,当一个极点从s=1出发,往S 左半平面移动,过原点为系统稳定与否的分界点。