海水运动基本方程
- 格式:pptx
- 大小:1.62 MB
- 文档页数:45
第四章 海水运动的基本方程 §4—1海水受力分析一、受力分类:1. 引起海水运动的力重力、压强梯度力、风应力、引潮力等; 2. 海水运动派生出来的力科氏力,摩擦力等。
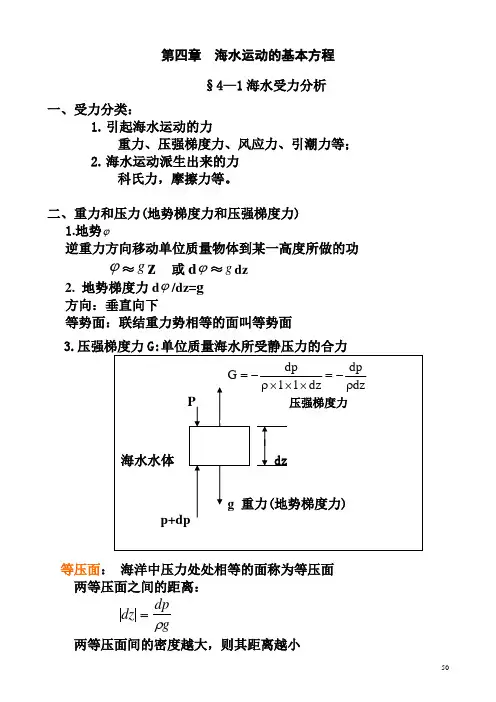
二、重力和压力(地势梯度力和压强梯度力) 1.地势ϕ逆重力方向移动单位质量物体到某一高度所做的功ϕ≈g z 或d ϕ≈g dz2. 地势梯度力d ϕ/dz=g 方向:垂直向下等势面:联结重力势相等的面叫等势面3.压强梯度力G:单位质量海水所受静压力的合力等压面: 海洋中压力处处相等的面称为等压面 两等压面之间的距离:dz dp g =ρ两等压面间的密度越大,则其距离越小dz dpdz 11dp G ρ-=⨯⨯⨯ρ-= P 压强梯度力海水水体 dzg 重力(地势梯度力) p+dpG的方向:与等压面垂直;永远指向压力减小的方向。
G值的量级相当于无摩擦时,物体在lcm:1km斜面上所受的力. 正压场:等压面与等势面平行的压力场称为正压场斜压场:等压面相对等势面发生倾斜的压力场称为斜压场。
(a)正压场 (b) 斜压场内压场: 仅由ρ分布决定的压力场.t(温度)低t(温度)高s(盐度)高s(盐度)低ρ(密度)大ρ(密度)小外压场:由海面上的风、降水、江河径流等原因所产生的压力场总压场: 外压场迭加在内压场之上海洋上部: 斜压场某深度以下:正压场海洋上部海洋下部G的一般表达式Gdpdn n=-1ρ或G p=-∇1ρkzjyix∂∂+∂∂+∂∂=∇分量形式:Gpxx=-1ρ∂∂;Gpyy=-1ρ∂∂; Gpzz=-1ρ∂∂三.科氏力1. 地球表面的线速度差平均角速率ω=7.292×10 5rad/s;曾母暗沙(4°N):462m/s;漠河(53°25′):276m/s;北极:0 m/s2. 傅科摆1851年傅科在67m长的钢丝下挂一个28kg的铁球组成一个单摆,他利用摆平面的转动成功地证明地球在自转。
傅科摆北极西东南极傅科摆摆动周期为T f =2πωϕsinω: rad/s;北京天文馆:9.6°/h,约230°/d南北两极: 360°/d T E=2πωT E:地球自转周期,86164s,称为一个恒星日也就是地球相对某一无限远的恒星自转的周期。
第七章 波浪理论及其计算原理在自然界中;常可以观察到水面上各式各样的波动,这就是常讲的波浪运动,它造成海洋结构的疲劳破坏,也影响船的航行和停泊的安全。
波浪的动力作用也常引起近岸浅水地带的水底泥沙运动,致使岸滩崩塌,建筑物前水底发生淘刷,港口和航道发生淤积,水深减小,影响船舶的通航和停泊。
为了海洋结构物、驾驶船舶和船舶停靠码头的安全,必须对波浪理论有所了解。
一般讲,平衡水面因受外力干扰而变成不平衡状态,但表面张力、重力等作用力则使不平衡状态又趋于平衡,但由于惯性的作用。
这种平衡始终难以达到,于是,水体的自由表面出现周期性的有规律的起伏波动,而波动部位的水质点则作周期性的往复振荡运动。
这就是波浪现象的特性。
波浪可按所受外界的干扰不同进行分类。
由风力引起的波浪叫风成波。
由太阳、月亮以及其它天体引起的波浪叫潮汐波。
由水底地震引起的波浪叫地震水波由船舶航行引起的波浪叫船行波。
其中对海洋结构安全影响最大的是风成波。
风成波是在水表面上的波动,也称表面波。
风是产生波动的外界因素,而波动的内在因素是重力。
因此,从受力的来看;称为重力波。
视波浪的形式及运动的情况,波浪有各种类型。
它们可高可低,可长司短。
波可是静止的一一驻波(即两个同样波的相向运动所产生的波,也可以是移动的——推进波以一定的速度将波形不变地向一个方向传播的波),可以是单独的波,也可以是一个接一个的一系列波所组成的波群。
§7-1 液体波动理论一、流体力学基础1、速度场 描述海水质点的速度随空间位置和时间的变化规律的一个矢量。
),,,(t z y x V V =它的三个分量为:x 方向的量:),,,(t z y x u u =y 方向的量:),,,(t z y x v v =z 方向的量:),,,(t z y x w w =2、速度势 对于作无旋运动的液体,存在一个函数,它能反映出速度的变化,但仅仅是反映速度大小的变化,这个函数称为速度v的势函数,简称速度势: ),,,(t z y x φφ=3、速度与速度势的关系x u ∂∂=φ, y v ∂∂=φ, zw ∂∂=φ 二、海水运动的基本假设1、海水无粘性,只有重力是唯一的外力;2、液体自由液面上的压力为常数;3、液体波动振幅相对于波长为无限小;4、液体作无旋运动。

纳维-斯托克斯方程构造海水模型纳维-斯托克斯方程是描述流体运动的基本方程之一,它采用了质量守恒、动量守恒和能量守恒三个方面的基本原理。
在海水的模拟中,纳维-斯托克斯方程可以用来描述海水的流动。
海水是一种自然的、复杂的流体,它受到多种因素的影响,包括风力、地球自转、潮汐、大气压力等。
因此,构造海水模型时需要考虑这些影响因素,将它们纳入到方程中。
纳维-斯托克斯方程可以从动量守恒方程推导得到。
动量守恒方程可以表示为:ρ(Du/Dt) = -∇P + ρg + μ∇^2u其中,ρ为海水的密度,u为海水速度矢量,P为海水的压力,g为重力加速度,μ为海水的粘性系数,∇为向量的梯度运算符,∇^2为向量的拉普拉斯运算符。
在海水模型中,通常会简化方程并进行假设。
例如,假设海水是不可压缩的,即密度不随时间和位置的变化而变化。
这样,动量守恒方程可以进一步简化为:(Du/Dt) = -∇P + g + μ∇^2u这个方程描述了海水速度的变化,其中∇P表示压力梯度对流体产生的影响;g表示重力加速度对流体产生的影响;μ∇^2u表示粘性系数对流体产生的影响。
海水模型还需要考虑边界条件和初始条件。
边界条件可以是固定边界条件,例如海岸线;或周期性边界条件,例如周期性潮汐。
初始条件可以是静止状态,也可以是给定的初始速度场。
为了求解纳维-斯托克斯方程,需要采用数值方法进行离散化。
常用的方法有有限差分法、有限元法和有限体积法等。
这些方法将海水模型离散化为网格,然后通过迭代求解离散化后的方程组,得到海水流动的数值解。
海水模型的构建还需要考虑其他与海水运动相关的参数,例如海水的温度、盐度、溶解氧等。
这些参数可以通过方程的源项来表示,例如热量传递、盐度传递和氧气传递等。
总之,纳维-斯托克斯方程是构造海水模型的基本方程之一。
通过对方程进行适当的简化和离散化,可以模拟海水的流动行为,并进一步研究海洋的物理和化学过程。