用解析法设计凸轮廓线共20页文档
- 格式:ppt
- 大小:2.62 MB
- 文档页数:20
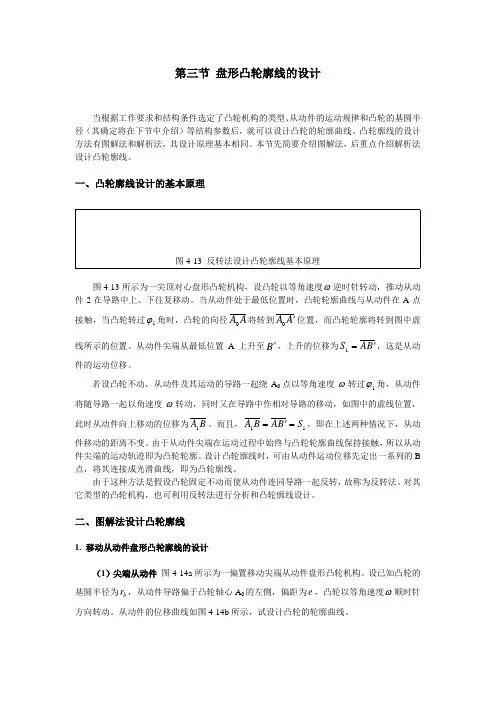
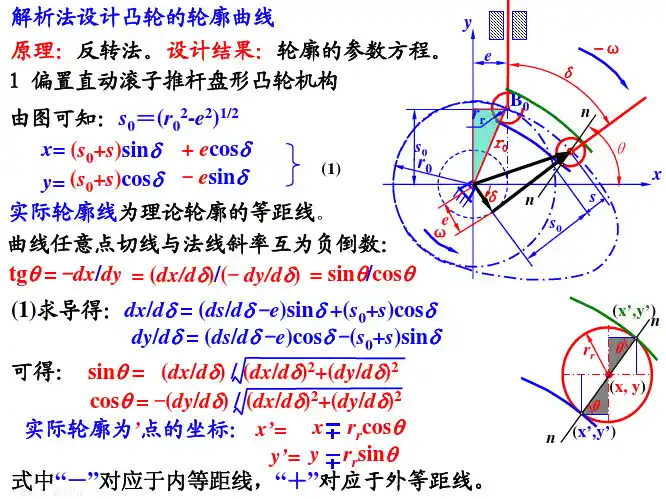
第三节 盘形凸轮廓线的设计当根据工作要求和结构条件选定了凸轮机构的类型、从动件的运动规律和凸轮的基圆半径(其确定将在下节中介绍)等结构参数后,就可以设计凸轮的轮廓曲线。
凸轮廓线的设计方法有图解法和解析法,其设计原理基本相同。
本节先简要介绍图解法,后重点介绍解析法设计凸轮廓线。
一、凸轮廓线设计的基本原理图4-13 反转法设计凸轮廓线基本原理图4-13所示为一尖顶对心盘形凸轮机构,设凸轮以等角速度ω逆时针转动,推动从动件2在导路中上、下往复移动。
当从动件处于最低位置时,凸轮轮廓曲线与从动件在A 点接触,当凸轮转过1ϕ角时,凸轮的向径A A 0将转到A A '0位置,而凸轮轮廓将转到图中虚线所示的位置。
从动件尖端从最低位置A 上升至B ',上升的位移为B A S '=1,这是从动件的运动位移。
若设凸轮不动,从动件及其运动的导路一起绕A 0点以等角速度-ω转过1ϕ角,从动件将随导路一起以角速度-ω转动,同时又在导路中作相对导路的移动,如图中的虚线位置,此时从动件向上移动的位移为B A 1。
而且,11S B A B A ='=,即在上述两种情况下,从动件移动的距离不变。
由于从动件尖端在运动过程中始终与凸轮轮廓曲线保持接触,所以从动件尖端的运动轨迹即为凸轮轮廓。
设计凸轮廓线时,可由从动件运动位移先定出一系列的B 点,将其连接成光滑曲线,即为凸轮廓线。
由于这种方法是假设凸轮固定不动而使从动件连同导路一起反转,故称为反转法。
对其它类型的凸轮机构,也可利用反转法进行分析和凸轮廓线设计。
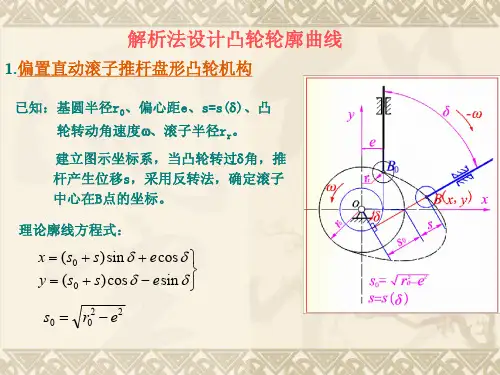
二、图解法设计凸轮廓线1. 移动从动件盘形凸轮廓线的设计(1)尖端从动件 图4-14a 所示为一偏置移动尖端从动件盘形凸轮机构。
设已知凸轮的基圆半径为b r ,从动件导路偏于凸轮轴心A 0的左侧,偏距为e ,凸轮以等角速度ω顺时针方向转动。
从动件的位移曲线如图4-14b 所示,试设计凸轮的轮廓曲线。
图4-14 尖端从动件盘形凸轮廓线设计依据反转法原理,具体设计步骤如下。
摆动从动件圆柱凸轮廓线的解析法设计从动拼音【注音】: cong dong从颤抖表述【意思】:由其他零件带动的(零件)。
1、从颤抖齿轮的速度必须提升。
2、就我个人而言,我从倾听和阅读中学习,我也从动手中学习,大多数人不这样做。
3、可以选配具有电子—液压掌控的前、后从动桥,同时实现最佳的转弯半径。
4、我们通常从动理学中推断出分子反应机制。
5、表明低磁化效应的磁性铁粒子当磁性线圈不导电时,转矩不能从传动轴传导于从动轴。
6、汽车离合器由压盖总成和从动盘总成组成,其旋转强度是重要的质量评价指标。
7、动态空间鼓励大众从动的角度周围事物,把人带回一个由时空结合的第四空间,比如说光怪陆离的光影,生动的背景音乐。
8、某从动齿轮在中修时发现开裂。
9、运用有限元和试验模态分析结合的研究方法,创建离合器从动盘的线性化数学模型,分析研究其动态特性;10、以杆组分析方法为基础,结合转化机构原理及凸轮机构的相对速度理论进行从动件的速度和加速度分析。
11、研究了经逊于细化处置的镍粉对从动齿轮热处理工艺和性能的影响。
12、旋转式发动机:燃烧室、汽缸与从动轴一起围绕着连接活塞的固定控制轴旋转的内燃机。
13、本文利用复数表示法,得出结论从颤抖转子中心并作平面通常运动情况下的圆锥轮廓线的设计方法。
14、系统计算法常常用于设计凸轮和从动件机构以及分析其特性。
15、分析了转动从动件圆柱凸轮机构误差产生原因,创建了数学模型,并得出其实际运动规律的方程。
16、利用nurbs实现了凸轮轮廓曲线的重构,并给出基于运动仿真实现迅速反求空间凸轮机构从动件运动规律的方法。
17、按本文的方法设计特定速比函数,可使与主动滚子压板的从动圆锥轮廓线不能产生曲率干预。
18、从动件运动规律的设计是凸轮机构设计的基础。
19、本文找到了凹陷圆弧底直动从动件盘形凸轮与旧有凸轮之间的区别与联系,并统一了旧有凸轮的设计方法。
20、介绍离合器从动盘总成中的一种典型波形片零件的冲压工艺及弯曲成形模设计。
解析法设计凸轮Ⅱ的实际轮廓曲线代码:Private Sub Command1_Click()Form2.Show '焦点出现form2End SubPrivate Sub Command1_Click()Dim l1, l2, l3 As SingleForm2.Picture2.Scale (-0.1, 400)-(7, -400)l1 = -Abs(Form2.Picture1.ScaleHeight / Form2.Picture1.ScaleWidth)l3 = -Abs(Form2.Picture3.ScaleHeight / Form2.Picture3.ScaleWidth) '定义两个图框的高宽比Form2.Picture1.ScaleWidth = 9.5Form2.Picture3.ScaleWidth = 150 '设定图框的长度Form2.Picture1.ScaleHeight = l1 * Form2.Picture1.ScaleWidthForm2.Picture3.ScaleHeight = l3 * Form2.Picture3.ScaleWidthForm2.Picture1.ScaleLeft = -0.1Form2.Picture3.ScaleLeft = -70Form2.Picture1.ScaleTop = 7Form2.Picture3.ScaleTop = 63 '规定高度的起点Dim dt1, dt2, dt3, dt4, dt5, s1, v1, s2, v2, k1, s0 As SingleDim n, m As IntegerDim h, e As IntegerDim dt6, dt7, dt8, dt9, dt10, dt11, x1, y1, x2, y2, r As SingleDim x3, y3, x4, y4, rg '定义各种量h = Form2.Text3e = Form2.Text2k1 = Form2.Text4s0 = Form2.Text1rg = Form2.Text5 '试各种变量与文本框相等,用于输入数据Const pi = 3.1415926n = 1000 '把每一步定义为360°/1000dt11 = 0dt1 = pi / 3dt2 = pi / 3dt3 = pi / 2 / ndt4 = 0dt6 = pi / 18Form2.Picture3.Line (-70, 0)-(70, 0)Form2.Picture3.Line (0, 70)-(0, -70)Form2.Picture1.Line (0, 0)-(7, 0)Form2.Picture1.Line (0, 6.5)-(0, 0)Form2.Picture2.Line (0, 0)-(7, 0)Form2.Picture2.Line (0, 390)-(0, -390) '画出各个两个图框的坐标轴s1 = h * ((dt4 / dt1) - Sin(2 * pi * dt4 / dt1) / (2 * pi))v1 = h * k1 * (1 - Cos(2 * pi * dt4 / dt1)) / dt1 '计算第一个点的速度和推程,选择正弦加速度规律x1 = (s0 + s1) * Sin(dt4) + e * Cos(dt4)y1 = (s0 + s1) * Cos(dt4) - e * Sin(dt4) '计算凸轮理论轮廓第一个点的坐标x3 = (s0 + s1 - rg) * Sin(dt4) + e * Cos(dt4)y3 = (s0 + s1 - rg) * Cos(dt4) - e * Sin(dt4) '计算实际工作轮廓曲线的第一个点的坐标While dt4 < dt1 '第一个六十度的循环绘制推程的曲线dt5 = dt4 + dt3s2 = h * ((dt5 / dt1) - Sin(2 * pi * dt5 / dt1) / (2 * pi))v2 = h * k1 * (1 - Cos(2 * pi * dt5 / dt1)) / dt1x2 = (s0 + s2) * Sin(dt5) + e * Cos(dt5)y2 = (s0 + s2) * Cos(dt5) - e * Sin(dt5)x4 = (s0 + s2 - rg) * Sin(dt5) + e * Cos(dt5)y4 = (s0 + s2 - rg) * Cos(dt5) - e * Sin(dt5) '绘制上述参数的第二个点Form2.Picture1.Line (dt4, s1)-(dt5, s2)Form2.Picture2.Line (dt4, v1)-(dt5, v2)Form2.Picture3.Line (x1, y1)-(x2, y2)Form2.Picture3.Line (x3, y3)-(x4, y4) '画直线,由于每一个步长很小,故可以一直代曲dt4 = dt5s1 = s2v1 = v2x1 = x2y1 = y2x3 = x4y3 = y4 '交换数值Wenddt11 = dt4While dt11 >= dt1 And dt11 < dt1 + dt6 '第二个10的远休角的的循环,绘制的理论和实际轮廓曲线都都是一段圆心角为十度的圆弧dt11 = dt11 + dt3x2 = (s0 + s2) * Sin(dt11) + e * Cos(dt11)y2 = (s0 + s2) * Cos(dt11) - e * Sin(dt11)x4 = (s0 + s2 - rg) * Sin(dt11) + e * Cos(dt11)y4 = (s0 + s2 - rg) * Cos(dt11) - e * Sin(dt11)Form2.Picture3.Line (x1, y1)-(x2, y2)Form2.Picture3.Line (x3, y3)-(x4, y4) '循环画点形成一个曲线x1 = x2y1 = y2x3 = x4y3 = y4Wenddt4 = dt4 + dt6Form2.Picture1.Line (dt1, s1)-(dt4, s1)Form2.Picture2.Line (dt1, v1)-(dt4, v1) '绘制远休时的s曲线While dt4 >= dt1 + dt6 And dt4 < dt1 + dt6 + dt2 '第三个60°近休循环,绘制回程的曲线dt8 = dt4 - dt1 - dt6s2 = h * (1 - (dt8 / dt2) + Sin(2 * pi * dt8 / dt2) / (2 * pi))v2 = h * k1 * (Cos(2 * pi * dt8 / dt2) - 1) / dt2x2 = (s0 + s2) * Sin(dt4) + e * Cos(dt4)y2 = (s0 + s2) * Cos(dt4) - e * Sin(dt4)x4 = (s0 + s2 - rg) * Sin(dt4) + e * Cos(dt4)y4 = (s0 + s2 - rg) * Cos(dt4) - e * Sin(dt4)dt5 = dt4 + dt3Form2.Picture1.Line (dt4, s1)-(dt5, s2)Form2.Picture2.Line (dt4, v1)-(dt5, v2)Form2.Picture3.Line (x1, y1)-(x2, y2)Form2.Picture3.Line (x3, y3)-(x4, y4) '坐标点连线dt4 = dt5x1 = x2y1 = y2x3 = x4y3 = y4s1 = s2v1 = v2 '数据交换Wenddt9 = dt4While dt9 >= dt1 + dt6 + dt2 And dt9 <= 2 * pi '第四个230°的近休循环dt9 = dt9 + dt3x2 = (s0 + s2) * Sin(dt9) + e * Cos(dt9)y2 = (s0 + s2) * Cos(dt9) - e * Sin(dt9)x4 = (s0 + s2 - rg) * Sin(dt9) + e * Cos(dt9)y4 = (s0 + s2 - rg) * Cos(dt9) - e * Sin(dt9)Form2.Picture3.Line (x1, y1)-(x2, y2)Form2.Picture3.Line (x3, y3)-(x4, y4)x1 = x2y1 = y2x3 = x4y3 = y4WendForm2.Picture1.Line (dt1 + dt6 + dt2, s1)-(2 * pi, s1)Form2.Picture2.Line (dt1 + dt6 + dt2, v1)-(2 * pi, v1) '绘制近休是的s曲线End SubPrivate Sub Command2_Click()Form2.Picture1.ClsForm2.Picture2.ClsForm2.Picture3.ClsForm2.Text1 = ""Form2.Text2 = ""Form2.Text3 = ""Form2.Text4 = ""Form2.Text5 = "" '曲线清空End Sub。