第8章 反馈控制电路
8.3自动增益控制电路
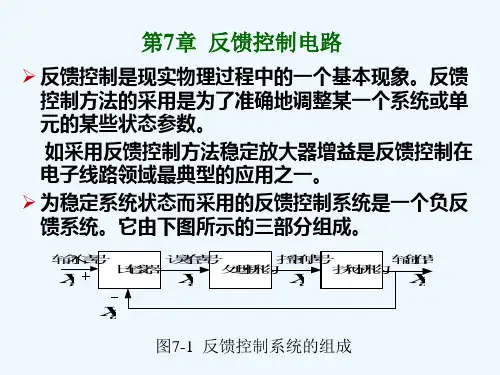
在通信、导航、遥测遥控系统中, 由于受发射功率大小、 收发距离远 近、电波传播衰落等各种因素的影响, 接收机所接收的信号强弱变化范围 很大, 信号最强时与最弱时可相差几十分贝。如果接收机增益不变, 则信号 太强时会造成接收机饱和或阻塞, 而信号太弱时又可能被丢失。因此, 必须 采用自动增益控制电路, 使接收机的增益随输入信号强弱而变化。 这是接 收机中几乎不可缺少的辅助电路。在发射机或其它电子设备中, 自动增益 控制电路也有广泛的应用。
第8章 反馈控制电路
8.3.1工作原理
自动增益控制电路是一种在输入信号幅值变化很大的情况下, 通过调节可控增益放大器的增益, 使输出信号幅值基本恒定或仅 在较小范围内变化的一种电路, 其组成方框图如图8.3.1所示。
设输入信号振幅为Ux, 输出信号振幅为Uy, 可控增益放大器增 益为Ag(uc), 即其是控制信号uc的函数, 则有:
第8章 反馈控制电路
2. 跟踪特性
利用误差传递函数Te(s), 在给定参考信号R(s)作用 下, 求出其误差函数E(s), 然后作拉氏反变换, 即可求得误差 信号e(t), 这就是跟踪特性。也可利用拉氏变换的终值定理 求得稳态误差值:
es= lim e(t)lim sE (s)
i
i
3.
利用拉氏变换与傅氏变换的关系, 将闭环传递函数T(s) 和误差传递函数Te(s)变换为T(jω)和Te(jω), 即为闭 环频率响应特性和误差频率响应特性。
由此可见, 反馈控制电路在这种工作情况下, 可以使输出信号y(t)稳定 在一个预先规定的参数上。
第8章 反馈控制电路
2. 参考信号r(t)
由于r(t)变化, 无论输入信号x(t)或可控器件本身特性 有无变化, 输出信号y(t)一般均要发生变化。从y(t)中提 取所需分量并经反馈后与r(t)比较, 如果二者变化规律不一致 或不满足预先设置的规律, 则将产生误差信号, 使 y(t)向减小误 差信号的方向变化, 最后使y(t)和r(t)的变化趋于一致或 满足预先设置的规律。