新型三轴式双旋翼直升机姿态控制
- 格式:pdf
- 大小:496.83 KB
- 文档页数:5
双旋翼直升机动力学方程引言双旋翼直升机是一种特殊类型的飞行器,它具有两个对称的旋翼。
与传统的直升机相比,双旋翼直升机具有更高的稳定性和操纵能力。
在本文中,我们将探讨双旋翼直升机的动力学方程,以了解其运动原理和控制方法。
动力学方程概述动力学方程是描述物体运动的数学模型。
对于双旋翼直升机来说,动力学方程可以分为两个部分:平衡方程和运动方程。
平衡方程描述了飞行器处于静止状态时所受到的各种力和力矩之间的平衡关系。
运动方程描述了飞行器在运动状态下所受到的各种外界作用力和内部控制作用下产生的加速度。
平衡方程在静止状态下,双旋翼直升机所受到的各种力和力矩必须平衡。
这些平衡关系可以通过以下平衡方程表示:1.垂直平衡:T1+T2−W=0其中,T1和T2分别表示两个旋翼的升力,W表示飞行器的重力。
2.横向平衡:Y−T1sin(θ)−T2sin(θ)=0其中,Y表示飞行器在横向方向上所受到的外界作用力,θ表示旋翼倾斜角。
3.纵向平衡:X−T1cos(θ)−T2cos(θ)=0其中,X表示飞行器在纵向方向上所受到的外界作用力。
4.旋转平衡:τ1+τ2=0其中,τ1和τ2分别表示两个旋翼产生的扭矩。
运动方程在运动状态下,双旋翼直升机所受到的各种外界作用力和内部控制作用会导致加速度的变化。
这些变化可以通过以下运动方程描述:1.垂直运动方程:w=T−D−gm其中,w表示垂直速度的变化率,T表示总升力,D表示总阻力,m表示飞行器的质量,g表示重力加速度。
2.横向运动方程:u=Ym其中,u表示横向速度的变化率。
3.纵向运动方程:v̇=Xm其中,v̇表示纵向速度的变化率。
4.旋转运动方程:ṗ=τI x其中,ṗ表示横滚角速度的变化率,τ表示总扭矩,I x表示飞行器绕x轴的转动惯量。
5.俯仰运动方程:q̇=μI y其中,q̇表示俯仰角速度的变化率,μ表示总弯矩,I y表示飞行器绕y轴的转动惯量。
6.偏航运动方程:ṙ=γI z其中,ṙ表示偏航角速度的变化率,γ表示总偏航力矩,I z表示飞行器绕z轴的转动惯量。
FY-30A 惯性姿态平衡仪FEIYU TECHF Y-30A 是一个基于惯性姿态测量的固定翼平衡仪。
它集成了三轴陀螺仪,三轴加速度计可以 在三维空间内控制飞机的姿态。
你可以通过接收机上的一个独立通道来决定使用或者关闭本 设备。
平衡仪的功能包括以下几点: • 水平飞行—当你打开平衡仪后,FY-30A 会自动控制飞机平稳飞行,对于刚开始学 习飞行的人,FY-30A 不但可以很好的帮助练习飞行,增长你的经验,长时间的飞 行还可以帮助你增强自信心。
而且从起飞到降落的整个过程中你可以在任意的时 间打开 FY-30A,操作方便。
• 紧急恢复—如果你迷失方向了或者感觉到飞机失控了, 此时你可以松开操作杆并且 通过开关通道打开 FY-30A,FY-30A 会自动发出修正信号来保持飞机的平衡,使 飞机回到水平飞行状态。
• 特技飞行—对于经验丰富的操作手来说,FY-30A 可以有助于你实现更精准的飞行 路线,特别是在在大风天气的时候。
在 FY-30A 的 3D 模式可以轻易的实现倒飞, 侧飞,吊机等动作,使飞行变的很简单,是飞行杂技动作练习的好帮手。
• FPV—对于长距离遥控或者 FPV,你只需要控制飞机的航向便可以尽情的享受其中 的乐趣,FY-30A 可以帮你保持飞机的平衡。
• 固件升级—用户可以自行升级发布的新版本的固件程序,实现产品的不断升级。
工作原理:FY-30A 平衡仪集成了三轴陀螺仪,三轴加速度计,组成基本的惯性导航平台,通过惯 性捷联姿态算法解算得到飞机的飞行姿态。
当 FY-30A 工作在自动平衡模式时,一旦探测到飞机的姿态与水平线之间的角度产生变 化时,它会发出修正信号控制飞机的副翼舵、升降舵和方向舵来保持飞机的平衡。
通过 FY-30A 持续的修正会使得飞机自动回到平衡的飞行姿态。
升降舵控制飞机的俯仰 姿态(向上或者向下) ,副翼舵控制飞机的横滚,方向舵修正飞机的飞行方向是向左或者向 右。
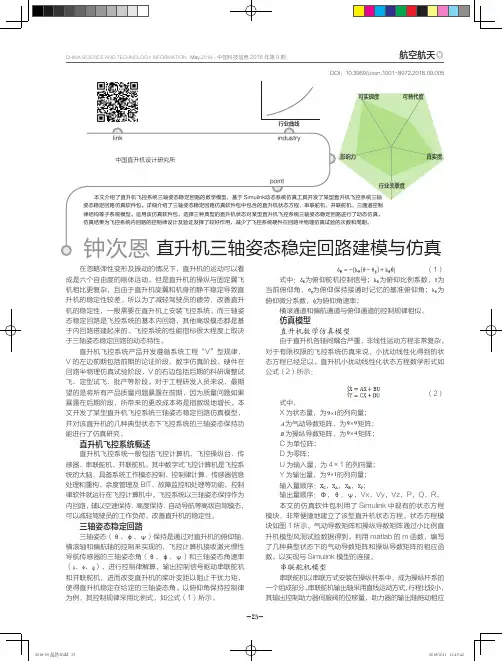
link中国直升机设计研究所本文介绍了直升机飞控系统三轴姿态稳定回路的数学模型,基于姿态稳定回路仿真软件包。
详细介绍了三轴姿态稳定回路仿真软件包中包含的直升机状态方程、串联舵机、并联舵机、三通道控制律结构等子系统模型。
运用该仿真软件包,选择三种典型的直升机状态对某型直升机飞控系统三轴姿态稳定回路进行了动态仿真,仿真结果为飞控系统内回路的控制律设计及验证发挥了较好作用,减少了飞控系统硬件在回路半物理仿真试验的次数和周期。
为俯仰舵机控制信号;为俯仰比例系数,为俯仰保持接通时记忆的基准俯仰角;俯仰微分系数,横滚通道和偏航通道与俯仰通道的控制规律相似。
(2),,输出量顺序:Φ,θ,ψ,Vx,Vy,Vz,P,Q,R。
、、和并联舵机,进而改变直升机的桨叶变距以阻止干扰力矩,操纵拉杆运动,改变桨叶的桨距以改变气动力的方向和大小。
在稳定飞行时,电动操纵舵机输出轴工作在中立位置附近。
串联舵机接收飞控计算机发出的无刷电机驱动信号,无刷电机带动舵机输出轴运动,同时将通过LVDT 检测到的舵机输出轴实际位置信号传回给飞控计算机。
它是飞控系统执行机构之一,特点是速度快。
本文采用了简单的串联舵机等效线性模型,如图2所示。
并联舵机模型并联舵机输出轴通过摇臂与操纵杆系呈并联形式连接,舵机输出轴呈旋转运动方式。
与串联舵机相比较,并联舵机权限大,速度慢,其作用主要包括:1)与串联舵机共同作用实现自动飞行控制系统三轴姿态保持及高度保持、空速保持等高级自驾模态功能;2)为驾驶杆提供锚定点。
本文采用了简单的并联舵机等效线性模型,如图3所示。
所示。
其中三通道控制器的结构类似,以俯仰通道控制律结构为例,如图5所示。
图1 状态方程模块图3 并联舵机等效模型图4 仿真模型框图图5 俯仰通道控制律结构图8 状态3时域仿真曲线图6 状态1仿真时域曲线图7 状态2时域仿真曲线。
对于有三个转子的小规模直升机的实时控制摘要:本文提出了小飞行器的一种原始配置,它基于带有固定角螺旋桨的三个转子。
并描述了控制向量的生成过程,展现了飞机动力学的详细数学模型。
考虑到实际情况中一些针对小型无人机的限制,提出了一个使三轴式旋翼飞机完全稳定的控制策略,合成的控制器比较简单,而且在实时实验和仿真演示时都表现出了良好的性能。
还有一种基于Simulink的平台被开发了来实现实时控制的目的。
关键词:直升机实施控制三个转子无人机或者遥控飞机这些自行推进式的飞行器都是远程控制或者能够自主操作的,过去的几年中,有机载智能功能的自主飞行器有了飞速的发展。
目前,几种无人机已经服务于军队、监控任务、信息采集等领域。
本文将展示最近关于有三个转子和非循环式螺旋桨的小型飞机的设计工作。
这种低成本的配置(70 cm×70 cm×15 cm)可以进行垂直起飞和着陆、悬停和水平飞行任务。
它满足小型化需求,并且在机械实现上也更为简单。
目前很少有关于基于三转子配置的研究。
之前有的研究中制造了装有传感器和电子电路的有三个转子的飞行器中的控制律是从三旋翼飞机简化模型中推导出的,它基于嵌套饱和度技术。
本文的贡献在于描述并提出了一个详尽的三旋翼飞机动力学数学模型。
事实上,饱和非线性是非常普遍的,执行器的饱和度对于飞机的整体稳定性有显著的影响。
几种新的非线性工具是用来分析和控制输入有界的线性和非线性系统的。
所设计的控制器考虑到了控制输入的有界性,并得出更利于执行的简明表达式。
此外,所构造的控制器具有良好的性能,并且比其他方法提高了闭环系统的收敛速度。
1 三旋翼飞机的描述与建模所需的控制向量(推力和三个扭矩)是通过简单的机械原理得到的,这种机制包括两个体固定转子和一个有固定角叶片的尾倾转旋翼。
前面的两个转子是朝相反的方向旋转的,并且固定在飞机的框架上。
尾旋翼可以相对于E1轴倾斜,使用伺服电机以产生偏航力矩。
由于前面两个主转子是由两个独立的电机驱动,其角速度可以被控制来产生主要推力以及轧制力矩。
旋翼机怎么上升下降的原理
旋翼机的上升和下降是通过控制主旋翼的旋转速度来实现的。
当主旋翼的旋转速度增加时,主旋翼产生的升力也增加,从而使飞机上升。
此时,控制杆向上推动,增加发动机的推力和控制主旋翼叶片的螺距,使其产生更多升力。
相反,当主旋翼的旋转速度减小时,主旋翼产生的升力也减小,从而使飞机下降。
此时,控制杆向下拉动,减小发动机的推力和控制主旋翼叶片的螺距,使其产生较少的升力。
除了旋转速度的调节,旋翼机的上升和下降还可以通过调节机身的姿态来实现。
在上升时,将机身向前倾斜,以增加飞机的气动升力。
在下降时,将机身向后倾斜,以减小飞机的气动升力。
需要注意的是,旋翼机的上升和下降通常是与其他飞行动作(如前进、转弯等)相结合进行的,需要配合好各种控制操作,才能使飞机实现准确、平稳的上升和下降。
新型三轴式双旋翼直升机姿态控制
王新宇;宋明明;郝仁剑;周永明;李月标;孙冠;马志赛
【期刊名称】《大连理工大学学报》
【年(卷),期】2011(051)0z1
【摘要】无人直升机在军事、民用领域扮演着重要角色.新型三轴式双旋翼直升机结构简单、容易控制、稳定性强.通过对新型直升机进行数学建模,提出电机实时分组控制新算法,实现了各姿态角独立控制,进而实现了直升机的姿态和航向控制.测试证明,新型直升机具有良好的操控性和稳定性,应用前景广泛.
【总页数】4页(P73-76)
【作者】王新宇;宋明明;郝仁剑;周永明;李月标;孙冠;马志赛
【作者单位】北京理工大学,自动化学院,北京,100081;北京理工大学,自动化学院,北京,100081;北京理工大学,自动化学院,北京,100081;北京理工大学,自动化学院,北京,100081;北京理工大学,自动化学院,北京,100081;北京理工大学,自动化学院,北京,100081;北京理工大学,自动化学院,北京,100081
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.双旋翼尾坐式飞行器建模及悬停姿态控制 [J], 张迪洲;陈自力;胡永江;邸彦佳
2.双旋翼直升机旋翼的微多普勒特性分析 [J], 陈鹏;郝士琦;胡以华;李政
3.双旋翼直升机姿态控制系统设计及仿真 [J], 田玲玲
4.串级自抗扰控制器在纵列式双旋翼直升机飞行姿态控制中的应用 [J], 陈增强;李毅;袁著祉;孙明玮;刘忠信;孙青林
5.某共轴双旋翼无人直升机旋翼桨距操纵分配研究 [J], 董鹰;戴梦漪;翟剑豪
因版权原因,仅展示原文概要,查看原文内容请购买。
三倾转旋翼无人机直升机模式建模与控制研究王海洋;江涛;路平【摘要】针对一种新型三旋翼构型的倾转旋翼无人机的直升机模式控制问题进行研究,采用牛顿欧拉法对这种新型三旋翼构型的倾转旋翼无人机直升机模式进行了详细的动力学建模分析,建立了该无人机悬停模式6自由度非线性模型;在对该模型进行线性化的基础上,设计了这种三倾转旋翼无人机直升机模式下的高度、俯仰通道、滚转通道以及偏航通道的PID控制器,并在Matlab/Simlink环境下建立其仿真模型,对所设计的控制算法进行验证;实验结果表明,所设计的控制器能够满足系统的控制性能要求.【期刊名称】《计算机测量与控制》【年(卷),期】2015(023)008【总页数】4页(P2742-2744,2794)【关键词】三倾转旋翼无人机;直升机模式;建模;PID控制【作者】王海洋;江涛;路平【作者单位】军械工程学院无人机工程系,石家庄050003;军械工程学院无人机工程系,石家庄050003;军械工程学院无人机工程系,石家庄050003【正文语种】中文【中图分类】V212为了适应越来越复杂的任务需求,集多种性能于一身的无人机逐渐地被应用于军事和民用领域。
倾转旋翼机是在固定翼飞机的两侧机翼上安装可倾转的旋翼,用于提供飞机起降时的升力和前飞时的拉力。
倾转旋翼机同时具有垂直起降、悬停和高速飞行的特性,能实现固定翼模式、过渡模式和直升机模式[1]的自由转换。
集固定翼飞机和直升机的优良特性于一身,在军事和民用等方面具有广阔的应用前景。
目前,代表的倾转旋翼无人机有美国的鹰眼无人机[2],该倾转旋翼无人机采用双旋翼构型能够实现各个飞行模式间的自由转换,文献[1-3]采用CFD方法,对这种倾转旋翼无人机的旋翼机翼流场进行了详细的分析,研究结果表明在悬停状态下机翼影响旋翼的效率。
文献[4]在此基础上采用对旋翼/机翼流场进行了模拟和分析,研究了旋翼相对机翼的高度和旋翼桨叶安装角对旋翼/机翼干扰的影响。
5.2.3 直升机旋翼的操纵
直升机的飞行控制与飞机的飞行控制不同,直升机的飞行控制是通过直升机旋翼的倾斜实现的。
直升机的控制可分为垂直控制、方向控制、横向控制和纵向控制等,而控制的方式都是通过旋翼实现的,具体来说就是通过旋翼桨毂朝相应的方向倾斜,从而产生该方向上的升力的水平分量达到控制飞行方向的目的。
直升机体放在地面时,旋翼受其本身重力作用而下垂。
发动机开车后,旋翼开始旋转,桨叶向上抬,直观地看,形成一个倒立的锥体,称为旋翼锥体,同时在桨叶上产生向上的升力。
随着旋翼转速的增加,升力逐渐增大。
当升力超过重力时,直升机即铅垂上升;若升力与重力平衡,则悬停于空中;若升力小于重力,则向下降落。
旋转旋翼桨叶所产生的拉力和需要克服阻力产生的阻力力矩的大小,不仅取决于旋翼的转速,而且取决于桨叶的桨距。
从原理上讲,调节转速和桨距都可以调节拉力的大小。
但是旋翼转速取决于发动机(通常用的是涡轮轴发动机或活塞式发动机)主轴转速;而发动机转速有一个最有利的值,在这个转速附近工作时,发动机效率高,寿命长。
因此,拉力的改变主要靠调节桨叶桨距来实现。
但是,桨距变化将引起阻力力矩变化,所以,在调节桨距的同时还要调节发动机油门,保持转速尽量靠近最有利转速工作。
直升机的平飞依靠升力倾斜所产生的水平分量来实现。
直升机的方向是靠尾桨控制的。
欲使直升机改变方向,则需踩脚蹬,改变尾桨的桨距,使尾桨拉力变大或变小,从而改变平衡力矩的大小,实现机头指向的操纵。
三轴航天器姿态控制的自适应动态规划方法
朱加华;戈新生;王明泽
【期刊名称】《北京信息科技大学学报(自然科学版)》
【年(卷),期】2018(033)001
【摘要】应用执行依赖双启发式动态规划方法(ADDHP)研究三轴航天器姿态机动的最优控制问题.首先根据系统模型,选取状态变量和控制变量,利用评价网络近似性能指标函数,执行网络逼近控制变量;然后,根据控制目标确定系统的效用函数,保证航天器姿态达到期望位置;最后,分别在单轴和三轴机动2种条件下进行仿真实验,并与执行依赖启发式动态规划方法(ADHDP)进行比较.仿真结果表明针对三轴航天器姿态最优控制问题,应用执行依赖双启发式动态规划方法,能够满足约束条件,并且响应速度快,比执行依赖启发式动态规划方法有更好的控制效果.
【总页数】6页(P27-32)
【作者】朱加华;戈新生;王明泽
【作者单位】北京信息科技大学自动化学院,北京100192;北京信息科技大学机电工程学院,北京100192;北京信息科技大学自动化学院,北京100192
【正文语种】中文
【中图分类】TP183
【相关文献】
1.一种偏置动量卫星的三轴姿态控制方法 [J], 吴丹
2.三轴气浮台挠性航天器动力学模拟方法研究 [J], 陈欢龙;周军;刘莹莹;牟小刚
3.陀螺飞轮——一种用于航天器三轴姿态控制的新型执行机构/敏感器 [J], G.Tyc;虎刚;等
4.基于三轴磁强计的姿态控制设计方法 [J], 毛伟;林春生;庞学亮
5.基于LADRC的车用三轴增稳云台姿态控制方法研究 [J], 祝毅峰; 王子辉; 何致远
因版权原因,仅展示原文概要,查看原文内容请购买。