结构动力学大作业.docx
- 格式:docx
- 大小:1.87 MB
- 文档页数:16
《高等结构动力学》课程Case Study斜坡缓冲车辆的运动学模型与缓冲距离影响因素分析姓名: 班号: 学号:摘要: 为了计算无动力车辆在斜坡上的最小缓冲距离,本文建立了斜坡行驶车辆的半车模型的运动学方程,采用龙格库达法对微分方程求解,得到初始速度与斜坡角度对缓冲距离的影响规律。
1.引言为防止制动失灵的车辆冲下山谷, 盘山公路的下行方向每隔一定距离需要设置一个缓冲区,如图1所示。
缓冲区一般由一段具有上升坡度的渣土路面形成。
制动失灵的车辆驶入缓冲区后,其动能一部分转换成势能,一部分由车轮与路面的摩擦耗散。
图2所示为一车辆简化模型,车体高h=1.8m, 长b=5m 。
已知前轮刚度K 1=5.5*105N/m, 前轮阻尼系数C 1=8*104N •s/m, 后轮刚度K 2=8.5*105N/m, 后轮阻尼系数C 2=C 1; 车体按匀质记,总重10吨,质心距地面高度H=1.5m 。
摩擦力按下式计算:()()i i f t N t μ=⋅ i=1, 2 μ—摩擦系数,μ=0.3N i -- 车轮所受地面的正压力。
图1 盘山公路缓冲区示意图 图2 车辆简化模型假设: ① 车辆行驶过程中的车体变形很小,可忽略不计。
② 车轮质量与车身质量相比很小,可忽略不计。
分别给出缓冲区坡度为300和450时的车辆驶入速度与缓冲区长度的关系曲线以及车速为70Km/小时时缓冲区的最小长度。
2 斜坡行驶车辆的动力学模型斜坡行驶车辆的物理模型与力学模型分别如图3和图4所示。
图3 斜坡行驶车辆物理模型图4 斜坡行驶车辆力学模型2).图5 斜坡行驶车辆模型受力分析建立如图5所示的斜坡行驶车辆的力学模型,以质心C 点垂直方向坐标cy 和转角c θ为广义坐标,1y 和2y 分别为弹簧位置垂直方向坐标(均取在弹簧原长的位置处),采用达朗贝尔原理建立车辆运动的微分方程如下。
以C 点垂直斜面方向的力平衡方程:111222()()cos 0c my k y cy k y cy mg α++++-=(1)以C 点沿斜面方向的力平衡方程:111222()sin 0c mx k y cy k y cy mg μα+++++=(2)以质心C 点取矩的力矩平衡方程:111222111222()()()()()()022cc c L LJ cy k y cy k y H y k y cy H y k y cy θμμ-+-++-++-+=+(3)式中,车辆转动惯量22()12m J b h =+;A 点坐标12c c Ly y θ=-,B 点坐标12c c Ly y θ=+,坐标几何关系如图6所示。
结构动力学大作业班级:学号:姓名:目录1. Wilson-θ法原理简介 (2)2. Wilson-θ程序验算 (3)2.1△t的影响 (4)2.2 θ的影响 (5)3. 非线性问题求解 (5)4. 附录 (8)Wilson-θ法源程序 (8)1. Wilson -θ法原理简介图1-1Wilson-θ法示意图Wilson-θ法是基于对加速度a 的插值近似得到的,图1-1为Wilson-θ法的原理示意图。
推导由t 时刻的状态求t +△t 时刻的状态的递推公式:{}{}{}{}()t tt t t y y y y tτθτθ++∆=+-∆ (1-1)对τ积分可得速度与位移的表达式如下:{}{}{}{}{}2()2t t t t t t yy y y ytτθττθ++∆=++-∆ (1-2){}{}{}{}{}{}23()26t t t t t t t y y y y y ytτθτττθ++∆=+++-∆ (1-3)其中τ=θt ,由式(1-2)、(1-3)可以解出:{}{}{}{}{}266()2()t t t tt t t y y y y y t tθθθθ+∆+∆=---∆∆(1-4){}{}{}{}{}3()22t t t t t t t tyy y y y t θθθθ+∆+∆∆=---∆(1-5)将式(1-4)、(1-5)带入运动方程:[]{}[]{}[]{}{}m y C y k y P ++=(1-6)[]{}[]{}[]{}{}t t t t t t t tm y C y k y P θθθθ+∆+∆+∆+∆++= (1-7)注意到此时的式子为{{}t t y θ+∆}和上一个时刻{}t y 、{}t y、{}t y 以及t +θ△t 时刻的荷载{}t t P θ+∆相关,可以运用迭代的思想来求解,下图给出线弹性条件下Wilson -θ法的流程图:图1-2Wilson-θ法流程图2.Wilson-θ程序验算对线弹性条件下的Wilson-θ法进行MATLAB编程,源代码见附录。
高等结构动力学大作业
摘要:
一、高等结构动力学的概念和意义
二、高等结构动力学的主要研究内容
三、高等结构动力学的应用领域
四、高等结构动力学的发展趋势
正文:
一、高等结构动力学的概念和意义
高等结构动力学是研究结构在动力载荷作用下的响应和稳定性的学科,它主要关注结构在振动、冲击、地震等外部激励下的反应。
高等结构动力学在现代工程技术中具有重要意义,因为它可以帮助我们设计和分析各种结构,以确保它们在地震、风、水等自然灾害或人为冲击下能保持稳定和安全。
二、高等结构动力学的主要研究内容
高等结构动力学主要研究以下几个方面的内容:
1.结构动力学的基本理论:包括结构的自由振动、强迫振动和随机振动等。
2.结构动力学的数值计算方法:包括常用的有限元法、有限体积法和有限差分法等。
3.结构动力学的建模和识别:包括结构的建模、参数识别和模型更新等。
4.结构动力学的分析和设计:包括结构的动力响应分析、稳定性分析和抗震设计等。
三、高等结构动力学的应用领域
高等结构动力学在许多工程领域都有广泛的应用,包括:
1.建筑结构:包括高层建筑、桥梁、隧道和机场等。
2.机械结构:包括汽车、飞机、火车和船舶等。
3.航空航天结构:包括火箭、卫星和空间站等。
4.核电站结构:包括核反应堆、冷却塔和燃料棒等。
四、高等结构动力学的发展趋势
随着计算机技术的发展,高等结构动力学的数值计算方法越来越精确,可以更准确地模拟结构的动力响应。
同时,随着大数据和人工智能技术的发展,结构动力学的建模和识别也将更加智能化和自动化。
高等结构动力学大作业
高安槽钢是一种优质的建筑钢材,广泛应用于建筑、桥梁、输电塔等领域。
它以其优良的性能和合理的价格赢得了广大用户的好评。
一、高安槽钢简介
高安槽钢,全称高安热轧槽钢,是一种热轧成型的槽形钢材。
它通常由碳素结构钢、优质碳素结构钢、低合金结构钢等材料制成,具有较好的力学性能和耐腐蚀性能。
二、高安槽钢的参数
高安槽钢的参数主要包括:材质、规格、形状、尺寸等。
其中,材质决定了槽钢的力学性能和耐腐蚀性能;规格和形状则决定了槽钢在使用过程中的具体用途;尺寸则影响了槽钢的承载能力和使用寿命。
三、高安槽钢的应用领域
高安槽钢广泛应用于建筑、桥梁、输电塔、石油、化工、船舶、机车等领
域。
例如,在建筑领域,高安槽钢可用于搭建建筑框架、支撑结构等;在桥梁领域,高安槽钢可用于桥梁的支撑结构、加固结构等。
四、高安槽钢的优势与特点
高安槽钢具有以下优势和特点:
1.良好的力学性能:高安槽钢具有较高的抗拉强度、屈服强度和耐压强度,能够满足各种工程结构的使用要求。
2.耐腐蚀性能好:高安槽钢采用优质钢材制成,具有良好的耐腐蚀性能,可适用于各种环境。
3.尺寸精度高:高安槽钢采用先进的生产工艺,保证了产品的尺寸精度,便于施工安装。
4.质量稳定:高安槽钢的生产过程严格控制,保证了产品质量的稳定。
五、高安槽钢的生产厂家及联系方式
高安槽钢的生产厂家众多,其中以我国大型钢铁企业为主。

结构动力学大作业------------------------------------------作者xxxx------------------------------------------日期xxxx结构动力学大作业班级土木卓越1201班学号U201210323姓名陈祥磊指导老师叶昆2014。
12.30 结构动力学大作业-—SDO F体系在任意荷载作用下的动力响应 一、结构参数计算结构为右图所示的 1、kg m 3101000⨯=m N k /1020006⨯= 2、m m m m N =⋅⋅⋅⋅⋅⋅==21 k k k k N λ==⋅⋅⋅⋅⋅⋅==213、结构参数中5=N ;0.1=λ。
二、确定各阶频率和振型多自由度体系自由振动时的运动方程为012121111=+⋅⋅⋅+++n n y k y k y k y m 022221212=+⋅⋅⋅+++n n y k y k y k ym .。
..。
.12jN-1N02211=+⋅⋅⋅+++n nn n n n y k y k y k y m 写成矩阵形式即为[]{}[]{}{}0=+y K yM 假设此方程的解答为{}{}()αω+=t Y y sin ,带入到运动方程中得到振动方程[][](){}{}02=-Y M K ω此方程要有非零解必须满足频率方程[][]02=-M K ω,可解得各阶主频率i ω再根据 [][](){}(){}02=-i i Y M K ω可求出结构的主振型。
在主振型中,通常将最后一个位移值设定为1,只要在程序中加入下列语句:MDOF .YMa trix(:,i)=MDO F.YMat rix(:,i )/MDOF 。
YMatr ix(MD OF 。
ND,i)运行程序之后得到如下结果: 1、各阶频率i ω和周期i TW1 12.7290261 T1 0。
493610843W 2 37.15584832T 2 0。
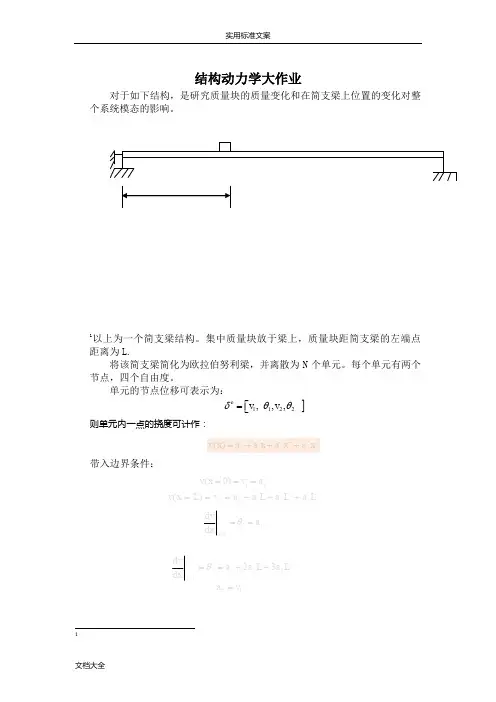
结构动力学大作业对于如下结构,是研究质量块的质量变化和在简支梁上位置的变化对整个系统模态的影响。
1以上为一个简支梁结构。
集中质量块放于梁上,质量块距简支梁的左端点距离为L.将该简支梁简化为欧拉伯努利梁,并离散为N 个单元。
每个单元有两个节点,四个自由度。
单元的节点位移可表示为:]1122,,,e v v δθθ⎡=⎣则单元内一点的挠度可计作:带入边界条件:1332210)(x a x a x a a x v +++=01)0(a v x v ===3322102)(L a L a L a a v L x v +++===110d d a xv x ===θ2321232d d L a L a a xv Lx ++===θ10v a =[]1234N N N N N =建立了单元位移模式后,其动能势能均可用节点位移表示。
单元的动能为:00111()222l l T TT ke e e e e y E dx q N Ndxq q mq t ρρ∂===∂⎰⎰ 其中m 为单元质量阵,并有:lT m N Ndx ρ=⎰带入公式后积分可得:2222156225413224133541315622420133224l l l l l l l m l l ll ll ρ-⎡⎤⎢⎥-⎢⎥=⎢⎥-⎢⎥---⎣⎦单元势能可表示为2220011()()222T l lT Te pe e e e q y E EI dx EI N N dxq q Kq x ∂''''===∂⎰⎰其中K 为单元刚度矩阵,并有()lT K EI N N dx ''''=⎰2232212612664621261266264l l l l l l EI k l l l l lll -⎡⎤⎢⎥-⎢⎥=⎢⎥---⎢⎥-⎣⎦以上为单元类型矩阵,通过定义全局位移矩阵,可以得到系统刚度矩阵和系统质量矩11θ=a )2(1)(3211222θθ+--=Lv v L a )(1)(22122133θθ++-=Lv v L a 1232133222231)(θ⎪⎪⎭⎫ ⎝⎛+-+⎪⎪⎭⎫ ⎝⎛+-=L x L x x v L x L x x v 22232332223θ⎪⎪⎭⎫ ⎝⎛-+⎪⎪⎭⎫ ⎝⎛-+L x L x v L x L x 24231211)()()()()(θθx N v x N x N v x N x v +++=阵。
高等结构动力学大作业在高等结构动力学课程的学习过程中,我们将接触到许多有关结构动力学的理论和方法。
本文将围绕高等结构动力学的内容,探讨其在工程实践中的应用和未来的发展趋势。
一、结构动力学简介结构动力学是研究结构在受到外界力作用下的响应和振动特性的学科。
它广泛应用于桥梁、建筑物、飞机、船舶等工程结构的设计和分析过程中。
在实际工程中,结构动力学的研究对于保证结构的安全性、提高结构的抗震性能至关重要。
二、结构动力学的应用领域1. 桥梁工程:结构动力学在桥梁工程中有着广泛的应用。
通过结构动力学分析,可以评估桥梁的振动响应,预测桥梁的疲劳寿命,并优化桥梁的设计参数,提高桥梁的安全性和使用寿命。
2. 建筑物工程:结构动力学在建筑物工程中也起到关键的作用。
通过结构动力学分析,可以评估建筑物在风荷载和地震荷载下的响应,为建筑物的设计提供科学依据,确保建筑物具备足够的抗震性能和舒适性。
3. 航空航天工程:在航空航天工程中,结构的振动特性和动态响应对于飞行安全至关重要。
结构动力学可以用于评估飞行器的疲劳寿命、优化飞行器的设计,提高飞行器的结构强度和稳定性。
三、结构动力学的方法和技术1. 动力学数学模型:结构动力学利用数学模型描述结构在受力作用下的运动规律。
常见的数学模型包括单自由度振动系统、多自由度振动系统以及连续体振动系统等。
2. 振动试验技术:振动试验技术是结构动力学研究中常用的方法之一。
通过振动试验可以获取结构的振动特性和模态参数,为结构分析和设计提供实验数据支持。
3. 数值计算方法:结构动力学的研究也离不开数值计算方法的支持。
常用的数值计算方法包括有限元法、边界元法、模态超级元法等。
这些方法可以用于求解结构的静力响应和动力响应,预测结构的疲劳寿命和抗震性能等。
四、结构动力学的挑战与前景1. 疲劳寿命与保养:在长期使用过程中,结构的疲劳寿命是一个需要关注的问题。
结构动力学可以通过疲劳寿命评估和振动监测技术帮助我们预测结构的损伤情况,以及制定合理的结构维修和保养策略。
结构动力学课程论文结构动力学课程论文一、题目1、试设计一个3层框架,根据实际结构参数,求出该结构的一致质量矩阵、一致刚度矩阵;2、至少采用两种方法求3层框架的频率和振型;3、采用时程分析法,输入地震波,求出所设计的3层框架各层的非线性位移时程反应,要求画出所设计的框架图、输入的地震波的波形图、所求得的各楼层位移时程反应图。
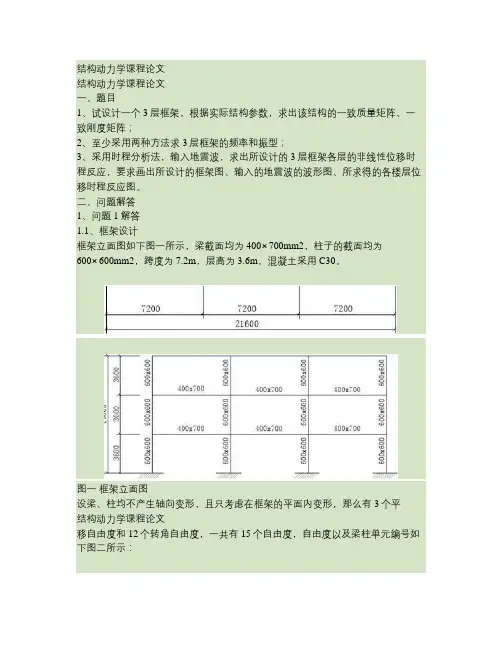
二、问题解答1、问题1解答1.1、框架设计框架立面图如下图一所示,梁截面均为400⨯700mm2,柱子的截面均为600⨯600mm2,跨度为7.2m,层高为3.6m,混凝土采用C30。
图一框架立面图设梁、柱均不产生轴向变形,且只考虑在框架的平面内变形,那么有3个平结构动力学课程论文移自由度和12个转角自由度,一共有15个自由度,自由度以及梁柱单元编号如下图二所示:V1V2V3图二单元编号及自由度方向先计算各个单元的一致质量矩阵和一致刚度矩阵,然后把相关的单元叠加组合计算得到整个结构的一致质量矩阵和一致刚度矩阵。
1.2、结构的一致质量矩阵梁:=0.4⨯0.7⨯2500=700kg/m, L=7.2m;梁、柱都为均布质量,故:⎧f⎪f⎪⎨⎪f⎪⎩fI1I2I3I4⎫⎪⎪L⎬=420⎪⎪⎭5622L⎡156⎢5415613L⎢⎢22L13L4L⎢⎣-13L-22L-3L-13L⎤-22L⎥⎥-3L⎥⎥4L⎦221⎫⎧v⎪v⎪⎪ 2⎪⎨⎬3⎪⎪v⎪ 4⎪⎩v⎭结构动力学课程论文结构动力学课程论文柱:=0.6⨯0.6⨯2500=900kg/m,L=3.6m 单元刚度矩阵如下:结构动力学课程论文结构动力学课程论文(m)(n)(p)ˆijˆijˆij由mij=m+m+m+....可计算一致质量矩阵中的各元素:(1)(2)(3)(10)(11)(12)(13)ˆ11ˆ11ˆ11ˆ11ˆ11ˆ11ˆ11m11=m+m+m+m+m+m+m=3⨯5040+ 4⨯1203.43=19933.72(10)(11)(12)(13)ˆ12ˆ12ˆ12ˆ12m12=m+m+m+m=4⨯416.57=1666.28结构动力学课程论文m13=0(10)m14=m15=m16=m17=m14=610.97(10)m18=m19=m1,10=m1,11=m18=-361.03 m1,12=m1,13=m1,14=m1,15=0(4)(5)(6)(10)(11)(12)(13)(14)(15)(16)(17)ˆ22ˆ22ˆ22ˆ22ˆ22ˆ22ˆ22ˆ22ˆ22ˆ22ˆ22m22=m+m+m+m+m+m+m+m+m+m+m=3⨯5040+8⨯1203.43=24747.44(14)(15)(16)(17)ˆ23ˆ23ˆ23ˆ23m23=m+m+m+m=4⨯416.57=1666.28(10)m24=m25=m26=m27=m24=361.03(14)(10)ˆ28ˆ28m28=m+m=610.97-610.97=0 同理 m29=m2,10=m2,11=0(14)m2,12=m2,13=m2,14=m2,15=m2.03 ,12=-361(7)(8)(9)(14)(15)(16)(17)(18)(19)(20)(21)ˆ33ˆ33ˆ33ˆ33ˆ33ˆ33ˆ33ˆ33ˆ33ˆ33ˆ33m33=m+m+m+m+m+m+m+m+m+m+m=3⨯5040+8⨯1203.43=24747.44(14)m34=m35=m36=m37=0 m38=m39=m3,10=m3,11=m38=361.03 (14)ˆ3ˆ(18)m3,12=m3,13=m3,14=m3,15=m.97-610.97=0 ,12+m3,12=610(1)(10)(1)ˆ44ˆ44ˆ45m44=m+m=2488.32+399.91=2888.23 m45=m=-1866.24m46=m47=0(10)ˆ48m48=m=-299.93m49=m4,10=m4,11=m4,12=m4,13=m4,14=m4,15=0(2)(1)(2)(11)ˆ56ˆ55ˆ55ˆ55=-1866.24m55=m+m+m=2488.32+2488.32+399.91=5376.55m56=mm57=m58=0(11)ˆ59m59=m=-299.93 m5,10=m5,11=m5,12=m5,13=m5,14=m5,15=0(2)(3)(12)ˆ66ˆ66ˆ66m66=m+m+m=2488.32+2488.32+399.91=5376.55(3)ˆ67m67=m=-1866.24 m68=m69=0(12)ˆ6m6,10=m.93 m6,11=m6,12=m6,13=m6,14=m6,15=0 ,10=-299(3)(13)ˆ77ˆ77m77=m+m=2488.32+399.91=2888.23m78=m79=m7,10=0(13)ˆ7m7,11=m.93 m7,12=m7,13=m7,14=m7,15=0 ,11=-299结构动力学课程论文(4)(10)(14)ˆ88ˆ88ˆ88m88=m+m+m=2488.32+399.91+399.91=3288.14(4)ˆ89m89=m=-1866.24 m8,10=m8,11=0(14)ˆ8m8,12=m.93 m8,13=m8,14=m8,15=0 ,12=-299(4)(5)(11)(15)ˆ99ˆ99ˆ99ˆ99m99=m+m+m+m=2488.32+2488.32+399.91+399.91=5776.46(5)ˆ9m9,10=m.24 ,10=-1866(15)ˆ9.93 m9,14=m9,15=0 m9,11=m9,12=0 m9,13=m,13=-299(5)(6)(12)(16)ˆ10ˆ10ˆ10ˆ10m10,10=m.32+2488.32+399.91+399.91=5776.46 ,10+m,10 +m,10+m,10=2488(6)(16)ˆ10ˆ m10,11=m=-1866.24m=m.93 m10,15=0m=m=010,1210,13,1110,1410,14=-299(6)(13)(17)ˆ11ˆ11ˆ11m11,11=m.32+399.91+399.91=3288.14,11+m,11+m,11=2488m11,12=m11,13=m11,14=0(17)ˆ11m11,15=m.93,15=-299(7)(14)(18)ˆ12ˆ12ˆ12m12,12=m.32+399.91+399.91=3288.14 ,12+m,12+m,12=2488 (7)ˆ12m12,13=m.24 m12,14=m12,15=0 ,13=-1866(7)(8)(15)(19)ˆ13ˆ13ˆ13ˆ13m13,13=m.32+2488.32+399.91+399.91=5776.46 ,13+m,13 +m,13+m,13=2488(8)ˆ13m13,14=m.24 m13,15=0 ,14=-1866(8)(9)(16)(20)ˆ14ˆˆˆm14,14=m+m+m+m.32+2488.32+399.91+399.91=5776.46 ,1414,1 414,1414,14=2488(9)ˆ14m14,15=m.24 ,15=-1866(9)(17)(21)ˆ15ˆ15ˆ15m15,15=m.32+399.91+399.91=3288.14 ,15+m,15+m,15=2488则得:一致质量矩阵(该矩阵为对称矩阵,故下三角省略)单位(kg)结构动力学课程论文0⎡19933.721666.28⎢24747.441666.28⎢⎢24747.44⎢⎢⎢⎢⎢⎢⎢M=⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣610.97361.0302888.23610.97361.030-1866.245376.55610.97361.0300-1866.245376.55610.97361.03000-1866.242888.23-361.030361.03-299.930003288.14-361.030361.030-299.9300-1866.245776.46-361.030361.0300-299.9300-1866.245776.46-361.030361.03000-299.9300-1866.243288.140-361.0300000-299.930003288.14⎤-361.03-361.03-361.03⎥⎥⎥000⎥000⎥⎥000⎥000⎥⎥000⎥000⎥⎥-299.9300⎥⎥0-299.930⎥00-299.93⎥⎥-1866.2400⎥5776.46-1866.240⎥5776.46-1866.24⎥⎥3288.14⎦⎥0001.3、结构的一致刚度矩阵各梁、柱均为等截面,故单元刚度矩阵为:-63L3L⎤⎧v1⎫⎧fs1⎫⎡6⎪f⎪⎪v⎪⎢6-3L-3L⎥⎪s2⎪2EI⎢-6⎪2⎪⎥=⎨⎬⎨⎬ 223⎢⎥f3L-3L2LLL⎪s3⎪⎪v3⎪⎢22⎥⎪⎪f3L-3LL2L⎣⎦⎪⎩v4⎪⎭⎩s4⎭框架梁:C30混凝土E=3⨯107KN/m2,0.40⨯0.73EI=3⨯10⨯=3.43⨯105kN·m2,L=7.2m 127结构动力学课程论文7框架柱:0.60⨯0.603EI=3⨯10⨯=3.24⨯105KN·m2 L=3.6m12结构动力学课程论文结构动力学课程论文结构动力学课程论文ˆ(m)+kˆ(n)+kˆ(p)+....可计算一致刚度矩阵中的各元素:由kij=kijijijˆ(10)+kˆ(11)+kˆ(12)+kˆ(13)=4⨯0.833⨯105=3.332⨯105 k11=k11111111ˆ(10)+kˆ(11)+kˆ(12)+kˆ(13)=4⨯(-0.833k12=k)⨯105=-3.332⨯105 k13=0 12121212 (10)k14=k15=k16=k17=k18=k19=k1,10=k1,11=k14=1.50⨯105k1,12=k1,13=k1,14=k1,15=0ˆ(10)+kˆ(11)+kˆ(12)+kˆ(13)+kˆ(14)+kˆ(15)+kˆ(16)+kˆ(17)=8⨯0.833⨯105=6.664⨯105 k22=k2222222222222222ˆ(14)+kˆ(15)+kˆ(16)+kˆ(17)=4⨯(-0.833k23=k)⨯105=-3.332⨯1052323232310k24=k25=k26=k27=k24=-0.861⨯105ˆ(10)+kˆ(14)=0.861⨯105-0.861⨯105=0 同理 k28=k2828k29=k2,10=k2,11=0结构动力学课程论文ˆ(14)=1.50⨯105 k2,12=k2,13=k2,14=k2,15=k2,12ˆ(14)+kˆ(15)+kˆ(16)+kˆ(17)+kˆ(18)+kˆ(19)+kˆ(20)+kˆ(21)=8⨯0.833⨯105=6.664⨯105 k33=k3333333333333333k34=k35=k36=k37=0(14)k38=k39=k3,10=k3,11=k38=-1.50⨯105ˆ(14)+kˆ(18)=1.50⨯105-1.50⨯105=0 k3,12=k3,13=k3,14=k3,15=k3,123,12ˆ(1)=0.953⨯105 ˆ(1)+kˆ(10)=1.906⨯105+3.60⨯105=5.506⨯105 k=kk44=k44444545 k46=k47=0ˆ(10)=1.80⨯105k48=k48k49=k4,10=k4,11=k4,12=k4,13=k4,14=k4,15=0ˆ(1)+kˆ(2)+kˆ(11)=1.906⨯105+1.906⨯105+3.60⨯105=7.412⨯105k55=k555555ˆ(2)=0.953⨯105 k56=k56k57=k58=0 ˆ(11)=1.80⨯105 k59=k59k5,10=k5,11=k5,12=k5,13=k5,14=k5,15=0ˆ(2)+kˆ(3)+kˆ(12)=1.906⨯105+1.906⨯105+3.60⨯105=7.412⨯105k66=k666666ˆ(3)=0.953⨯105 k67=k67ˆ(12)=1.80⨯105 k=k=k=k=k=0 k68=k69=0 k6,10=k6,116,126,136,146,156,10ˆ(3)+kˆ(13)=1.906⨯105+3.60⨯105=5.506⨯105k77=k7777k78=k79=k7,10=0ˆ(13)=1.80⨯105 k=k=k=k=0 k7,11=k7,127,137,147,157,11ˆ(4)+kˆ(10)+kˆ(14)=1.906⨯105+3.60⨯105+3.60⨯105=9.106⨯105k88=k888888ˆ(4)=0.953⨯105 k89=k89ˆ(14)=1.80⨯105 k=k=k=0 k8,10=k8,11=0 k8,12=k8,138,148,158,12ˆ(4)+kˆ(5)+kˆ(11)+kˆ(15)=1.906⨯105+1.906⨯105+3.60⨯105+3.60⨯105k99=k999999 99=11.012⨯105 14结构动力学课程论文ˆ(5)=0.953⨯105 k9,10=k9,10k9,14=k9,15=0k9,11=k9,12=0ˆ(15)=1.80⨯105 k9,13=k9,13ˆ(5)+kˆ(6)+kˆ(12)+kˆ(16)=1.906⨯105+1.906⨯105+3.60⨯105+3.60⨯105k10,10=k10,1010,1010,1010,10=11.012⨯1055ˆ(6)=0.953⨯105 kˆ(16)k10,11=k10,12=k10,13=0 k10,14=k10,14=1.80⨯10 k10,15=0 10,11ˆ(6)+kˆ(13)+kˆ(17)=1.906⨯105+3.60⨯105+3.60⨯105=9.106⨯105k11,11=k11,1111,1111,11ˆ(17)=1.80⨯105 k11,12=k11,13=k11,14=0 k11,15=k11,15 ˆ(4)+kˆ(7)+kˆ(18)=1.906⨯105+3.60⨯105+3.60⨯105=9.106⨯105k12,12=k12,1212,1212,12ˆ(7)=0.953⨯105 kk12,13=k12,14=k12,15=0 12,13ˆ(7)+kˆ(8)+kˆ(15)+kˆ(19)=1.906⨯105+1.906⨯105+3.60⨯105+3.60⨯105k13,13=k13,1 313,1313,1313,13=11.012⨯105ˆ(8)=0.953⨯105 kk13,14=k13,15=0 13,14ˆ(8)+kˆ(9)+kˆ(16)+kˆ(20)=1.906⨯105+1.906⨯105+3.60⨯105+3.60⨯105k14,14=k14,1 414,1414,1414,14=11.012⨯105ˆ(9)=0.3125⨯105k14,15=k14,15ˆ(9)+kˆ(17)+kˆ(21)=1.906⨯105+3.60⨯105+3.60⨯105=9.106⨯105k15,15=k15,1515,1515,15得到一致刚度矩阵(该矩阵为对称矩阵,故下三角省略)单位(kN/m)⎡3.332⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢K=105⨯⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣-3.3326.6640-3.3326.6641.50-1.5005.5061.50-1.5000.9537.4121.50-1.50000.9537.4121.50-1.500000.9535.5061.500-1.501.800009.1061.500-1.5001.80000.95311.0121.500-1.50001.80000.95311.0121.500-1.500001.80000.9539.10601.50000001.800009.10601.500000001.80000.95311.01201.5000000001.80000.95311.01201.50000000001.80000.9539.106⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦结构动力学课程论文 2 问题2 解答2.1采用振型分解反应谱法,求解框架的频率和振型ˆ}={0}的特征值得到频率ω和振型φ:由[K]-ω2[M]{v在Matlab中导入质量矩阵[M]和刚度矩阵[K],输[v,ω2]=eig(K,M);ω=sqrt(ω2)可得框架的频率为: []ωT={ω1ω2ω3........ω14ω15}={32.861, 109.022, 199.133, 234.897, 299.589, 307.809 , 378.000, 388.414, 454.501, 480.646, 583.896 , 637.664, 747.045, 828.365, 1056.507 }框架的振型为[φ]=[{φ1}{φ2}{φ3}......{φ14}{φ15}]=φ1 φ2 φ3 φ4 φ5 φ6 φ7 φ8φ9 φ10 φ11 φ12 φ13 φ14 φ15结构动力学课程论文2.2 用Stodola法计算三层框架的频率和振型此结构的柔度矩阵是f=K-1=D=fm=⎡52612⎢34661⎢⎢13564⎢⎢-2919⎢-2009⎢⎢-2009⎢-2919⎢10-5⨯⎢-4627⎢-3739⎢⎢-3739⎢⎢-4627⎢-4436⎢⎢-3429⎢-3429⎢⎢⎣-4436453153846316844-648-547-547-648-3237-2622-2622-3237-5313-4034-4034-5313179831712511915-95-55.4-55.4-95-395-408-408-395-2546-1883-1883-2546 1933.61502.4600.3585.14-403.97.9103-69.43-330.8-46.98-141.3-151.2-164.3-169.8-202-2022088.51495.3606.51-631828.14-463.5-16.66-39.22-52.13-197.9-226.6-226.6-114.2-168.9-189.520471488.4605.89-7.983-467.4891.72-635.4-193.6-45.69-344.3-30.81-189.2-169.2-112.1-227.41933.61502.4600.3-69.437.9103-403.9585.14-151.2-141.3-46.98-330.8-202-149.4-169.8-164.3-959-507-53.6-141139.935.2281.15567.3-144114.5114.5109.7-71.595.5537.1-466.3-466.3-74.97214.41-174.8143.1345.392-214.1713.23-171.7134.55129.58-99.996.75140.084-885-466-7545.39143.1-175214.4134.6-172713.2-21440.0896.75-99.9129.6-959.1-507.2-53.6281.15235.225139.93-141.1109.67114.46-143.6567.357.99237.09595.548-71.52-959.1-507.2-53.6281.15235.225139.93-141.1109.67114.46-143.6567.357.99237.09595.548-71.52-768.9-687.5-306.5-28.0246.216-14.4511.743129.09-99.9796.6839.588-186.8664.53-159.7122.14-768.9-687.5-306.511.743-14.4546.216-28.0239.58896.68-99.97129.09122.14-159.7664.53-186.8-898.5⎤-828.5⎥⎥-387.3⎥⎥-1.176⎥7.242⎥⎥-15.89⎥45.168⎥⎥58.04⎥37.49⎥⎥95.943⎥⎥-71.48⎥113.72⎥⎥107.89⎥-127.1⎥⎥525⎥⎦结构动力学课程论文V1(1)=DV1(0)迭代过程列表如下根据D V1(0)⎡52612⎢34661⎢⎢13564⎢⎢-2919⎢-2009⎢⎢-2009⎢-2919⎢10-5⨯⎢-4627⎢-3739⎢⎢-3739⎢⎢-4627⎢-4436⎢⎢-3429⎢-3429⎢⎢-4436⎣453153846316844-648-547-547-648-3237-2622-2622-3237-5313-4034-4034-5313179831712511915-95-55.4-55.4-95-395-408-408-395-2546-1883-1883-2546 1933.61502.4600.3585.14-403.97.9103-69.43-330.8-46.98-141.3-151.2-164.3-169.8-202-2022088.51495.3606.51-631828.14-463.5-16.66-39.22-52.13-197.9-226.6-226.6-114.2-168.9-189.520471488.4605.89-7.983-467.4891.72-635.4-193.6-45.69-344.3-30.81-189.2-169.2-112.1-227.41933.61502.4600.3-69.437.9103-403.9585.14-151.2-141.3-46.98-330.8-202-149.4-169.8-164.3-959-507-53.6-141139.935.2281.15567.3-144114.5114.5109.7-71.595.5537.1-466.3-466.3-74.97214.4-174.8143.145.39-214.1713.2-171.7134.5129.5-99.996.7540.08-885-466-7545.39143.1-175214.4134.6-172713.2-21440.0896.75-99.9129.6-959.1-507.2-53.6281.1535.22139.93-141.1109.67114.46-143.6567.357.9937.0195.54-71.52-959.1-507.2-53.6281.1535.22139.93-141.1109.67114.46-143.6567.357.9937.0995.54-71.52-768.9-768.9-687.5-306.5-28.0246.21-14.4511.74129.1-99.9796.6839.58-186.8664.5-159.7122.14-687.5-306.511.743-14.4546.216-28.0239.58896.68-99.97129.09122.14-159.7664.53-186.8-898.5⎤-828.5-387.3⎥-1.1767.242-15.89⎥45.1658.04⎥37.4995.94⎥-71.48113.7107.8⎥-127.1525⎦⎥⎡1⎤⎢1⎥⎢⎥⎢1⎥⎢⎥⎢1⎥⎢1⎥⎢⎥⎢1⎥⎢1⎥⎢⎥⎢1⎥⎢1⎥⎢⎥⎢1⎥⎢⎥⎢1⎥⎢1⎥⎢⎥⎢1⎥⎢1⎥⎢⎥⎢⎣1⎥⎦V1(1) V1(1) V1(2) V1(2) V1(3) V1(3) V1(4) V1(4 ) V1(5)⎡116889⎤⎢91257.8⎥⎢⎥⎢43091⎥⎢⎥-3558.1⎢⎥⎢-2480.4⎥⎢⎥⎢-2412.9⎥⎢-3571.2⎥⎢⎥-8221.3⎢⎥⎢-6697.9⎥⎢⎥⎢-6710.8⎥⎢⎥-8217.2⎢⎥⎢-12347⎥⎢⎥-9334.2⎢⎥⎢-9331.7⎥⎢⎥⎢⎣-12348⎥⎦10.7810.369-0.03-0.02-0.02-0.03-0.07-0.06-0.06-0.07-0.11-0.08-0.08-0.11949641928321926271926086917330082-3452-2444-2446-3451-7208-5858-5857-7208-9276-7082-7082-9276712580.7504311920.3285-3477-0.037-2465-0.026-2465-0.026-3477-0.037-7335-0.077-5965-0.063-5965-0.063-7335-0.077-9574-0.101-7305-0.077-7305-0.077-9574-0.101693690.7473301840.3252-3454-0.037-2446-0.026-2448-0.026-3454-0.037-7221-0.078-5868-0.063-5868-0.063-7221-0.078-0.1-9304-7103-0.077-7103-0.077-0.1-9304691890.747300910.325-3452-0.04-2444-0.03-2446-0.03-3451-0.04-7209-0.08-5859-0.06-5858-0.06-7209-0.08-9278-0.1-7084-0.08-7084-0.08-9278-0.1则得到第一振型形式为φ1=(-0.1585 -0.1184 -0.0515 0.005910.00418 0.00419 0.00591 0.01234 0.01003 0.01002 0.01234 0.01588 0.01212 0.01212 0.01588)再用公式ω12=(V1)TmV1(0)(V)mV(1)T1(1)1(1),将数据代入得ω1=32.75。
高等结构动力学大作业1. 简介高等结构动力学是结构工程学中的一门重要课程,主要研究结构在外力作用下的动力响应。
本次大作业将探讨高等结构动力学的相关内容,包括结构振动、模态分析和地震反应等。
2. 结构振动结构振动是结构动力学的基础知识,是研究结构在外力作用下的运动规律的重要手段。
结构振动可以分为自由振动和受迫振动两种。
2.1 自由振动自由振动是指结构在没有外力作用下的振动。
结构的自由振动可以通过求解结构的固有振型和固有频率来得到。
固有振型是指结构在自由振动时的形态,固有频率是指结构在自由振动时的振动频率。
2.2 受迫振动受迫振动是指结构在外力作用下的振动。
外力可以是周期性的,也可以是非周期性的。
受迫振动可以通过求解结构的响应函数和激励函数来得到。
3. 模态分析模态分析是研究结构振动特性的重要方法,通过模态分析可以得到结构的模态参数,包括模态振型和模态频率。
模态振型是指结构在特定模态下的振动形态,模态频率是指结构在特定模态下的振动频率。
3.1 模态分析的方法常用的模态分析方法包括有限元法、模态超级位置法和模态伸缩法等。
有限元法是一种基于数值计算的方法,通过离散化结构并求解特征值问题来得到结构的模态参数。
模态超级位置法是一种基于振动测量的方法,通过测量结构的振动响应来得到结构的模态参数。
模态伸缩法是一种基于模态参数估计的方法,通过估计结构的模态参数来得到结构的模态参数。
3.2 模态分析的应用模态分析在结构工程中有广泛的应用,包括结构设计、结构优化和结构监测等。
通过模态分析可以评估结构的动力性能,指导结构的设计和优化,以及监测结构的健康状况。
4. 地震反应地震反应是指结构在地震作用下的振动响应。
地震是一种破坏性的外力,对结构的安全性和稳定性具有重要影响。
地震反应分为静力反应和动力反应两种。
4.1 静力反应静力反应是指结构在地震作用下的静态响应。
静力反应可以通过结构的刚度矩阵和地震力谱来计算得到。
静力反应的计算可以采用静力分析和动力分析两种方法。
在高等结构动力学领域,大作业可以选择一个特定的主题或问题进行深入研究和分析。
以下是一些可能的大作业主题和相关内容,供参考:
1. 结构振动分析
-可以选择某种结构(如梁、柱、桥梁等)进行振动特性分析,包括自由振动和强迫振动的计算和模拟。
-可以探讨不同振动模式对结构的影响,以及振动频率、振型等参数的计算方法。
2. 结构地震响应分析
-研究结构在地震作用下的响应特性,包括地震波传播、结构的地震响应计算和分析。
-可以探讨结构的地震易损性评估方法,以及如何通过设计和加固措施提高结构的地震抗性。
3. 结构动力优化设计
-结合结构动力学理论和优化方法,研究如何在结构设计过程中考虑动力学要求,实现结构的轻量化和性能优化。
-可以探讨多目标优化方法在结构动力学设计中的应用,如考虑刚度、强度和振动等多个指标的优化设计。
4. 结构非线性动力学
-研究结构在非线性荷载下的动力学行为,包括非线性振动、共振现象、失稳分析等。
-可以探讨结构在非线性动力作用下的特殊现象和行为,如超谐波振动、周期加速等。
5. 结构阻尼与能量耗散
-探讨结构的阻尼机制和能量耗散特性,包括材料阻尼、结构阻尼器设计等内容。
-可以研究不同类型的阻尼器在减震和能量耗散中的应用效果,以提高结构的动力学性能。
以上是一些可能的大作业主题,你可以根据自己的兴趣和专业背景选择一个合适的主题,并展开深入的研究和分析,从而完成一份高质量的高等结构动力学大作业。
《结构动力学》结构动力学大作业研究生课程考核试卷研究生课程考核试卷(适用于课程论文、提交报告)科目:结构动力学大作业教师:姓名:学号:专业:岩土工程类别:专硕上课时间: 2015年 9 月至2015 年11 月考生成绩:卷面成绩平时成绩课程综合成绩阅卷评语:阅卷教师 (签名)2重庆大学研究生院制土木工程学院2015级硕士研究生考试试题1 题目及要求1、按规范要求设计一个3跨3层钢筋混凝土平面框架结构(部分要求如附件名单所示;未作规定部分自定)。
根据所设计的结构参数,求该结构的一致质量矩阵、一致刚度矩阵;2、至少采用两种方法求该框架结构的频率和振型;3、输入地震波(地震波要求如附件名单所示),采用时程分析法,利用有限元软件或自编程序求出该框架结构各层的线性位移时程反应。
342 框架设计2.1 初选截面尺寸取所设计框架为3层3跨,跨度均为4.5m ,层高均为3.9m 。
由于基础顶面离室内地面为1m ,故框架平面图中底层层高取 4.9m 。
梁、柱混凝土均采用C30,214.3/c f N mm =,423.010/E N mm =⨯,容重为325/kN m 。
估计梁、柱截面尺寸如下: (1)梁:梁高b h 一般取跨度的11218,取梁高b h =500mm ;5取梁宽300b b mm =;所以梁的截面尺寸为:300500mm mm ⨯ (2)柱:框架柱的截面尺寸根据柱的轴压比限值,按下列公式计算: ①柱组合的轴压力设计值...E N F g n β=其中:β:考虑地震作用组合后柱轴压力增大系数; F :按简支状态计算柱的负荷面积;E g :折算在单位建筑面积上的重力荷载代表值,可近似取为21214/KN m ;n :验算截面以上的楼层层数。
②c N cNA u f ≥其中:N u :框架柱轴压比限值;8度(0.2g ),查抗震规范轴压比限值0.75N u =;cf :混凝土轴心抗压强度设计值,混凝土采用30C ,214.3/cfN mm =。
结构动力学作业姓名:学号:目录1.力插值法 (1)1.1分段常数插值法 (1)1.2分段线性插值法 (4)2.加速度插值法 (7)2.1常加速度法 (7)2.2线加速度法 (9)附录 (12)分段常数插值法源程序 (12)分段线性插值法源程序 (12)常加速度法源程序 (13)线加速度法源程序 (13)1.力插值法力插值法对结构的外荷载进行插值,分为分段常数插值法和分段线性插值法,这两种方法均适用于线性结构的动力反应计算。
1.1分段常数插值法图1-1为一个单自由度无阻尼系统,结构的刚度为k ,质量为m ,位移为y (t ),施加的外力为P (t )。
图1-2为矩形脉冲荷载的示意图,图中t d 表示作用的时间,P 0表示脉冲荷载的大小。
图1-1 单自由度无阻尼系统示意图图1-2 矩形脉冲荷载示意图对于一个满足静止初始条件的无阻尼单自由度体系来说,当施加一个t d 时间的矩形脉冲荷载,此时结构在t d 时间内的位移反应可以用杜哈梅积分得到:0()sin ()2 (1cos )(1cos ) (0)tst st d P y t t d m ty t y t t Tωττωπω=-=-=-≤≤⎰(1-1)如果结构本身有初始的位移和速度,那么叠加上结构自由振动的部分,结构的位移反应为:02()cos sin (1cos) (0)st d y ty t y t t y t t Tπωωω=++-≤≤& (1-2)图1-3 分段常数插值法微段示意图对于施加于结构任意大小的力,将其划分为Δt 的微段,每一段的荷载都为一个常数(每段相当于一个矩形的脉冲荷载),如图1-3所示,则将每一段的位移和速度写成增量的形式为:1cos t sin t (1cos t)iii i y P y y kωωωω+=∆+∆+-∆& (1-3)i+1/sin t cos t sin t iii y P y y kωωωωω=-∆+∆+∆&& (1-4)程序流程图如下i+1cos t sin t (1cos t)iii y P y y kωωωω=∆+∆+-∆i+1/sin t cos t sin ti i i y Py y kωωωωω=-∆+∆+∆图1-4 分段常数插值法流程图根据流程图可以编写相应的算法,利用MATLAB 进行编程,程序源代码见附录。
结构动力学作业姓名:学号:目录1.力插值法 (1)1.1分段常数插值法 (1)1.2分段线性插值法 (4)2.加速度插值法 (7)2.1常加速度法 (7)2.2线加速度法 (9)附录 (12)分段常数插值法源程序 (12)分段线性插值法源程序 (12)常加速度法源程序 (13)线加速度法源程序 (13)1.力插值法力插值法对结构的外荷载进行插值,分为分段常数插值法和分段线性插值法,这两种方法均适用于线性结构的动力反应计算。
1.1分段常数插值法图1-1为一个单自由度无阻尼系统,结构的刚度为k ,质量为m ,位移为y (t ),施加的外力为P (t )。
图1-2为矩形脉冲荷载的示意图,图中t d 表示作用的时间,P 0表示脉冲荷载的大小。
图1-1 单自由度无阻尼系统示意图图1-2 矩形脉冲荷载示意图对于一个满足静止初始条件的无阻尼单自由度体系来说,当施加一个t d 时间的矩形脉冲荷载,此时结构在t d 时间内的位移反应可以用杜哈梅积分得到:0()sin ()2 (1cos )(1cos ) (0)tst st d P y t t d m ty t y t t Tωττωπω=-=-=-≤≤⎰(1-1)如果结构本身有初始的位移和速度,那么叠加上结构自由振动的部分,结构的位移反应为:002()cos sin (1cos) (0)st d yty t y t t y t t Tπωωω=++-≤≤ (1-2)图1-3分段常数插值法微段示意图对于施加于结构任意大小的力,将其划分为Δt 的微段,每一段的荷载都为一个常数(每段相当于一个矩形的脉冲荷载),如图1-3所示,则将每一段的位移和速度写成增量的形式为:1cos t sin t (1cos t)i ii i yP y y kωωωω+=∆+∆+-∆ (1-3)i+1/sin t cos t sin t i ii yP yy kωωωωω=-∆+∆+∆ (1-4)程序流程图如下图1-4分段常数插值法流程图根据流程图可以编写相应的算法,利用MATLAB 进行编程,程序源代码见附录。
高等结构动力学大作业【原创版】目录1.高等结构动力学的概念和意义2.高等结构动力学的研究方法和应用3.高等结构动力学的大作业要求和内容4.高等结构动力学大作业的完成方法和技巧5.高等结构动力学大作业的实际应用案例正文一、高等结构动力学的概念和意义高等结构动力学,作为力学的一个分支,主要研究结构在动力载荷作用下的响应和稳定性。
其研究的核心目标是为了提高结构的安全性、可靠性和经济性,从而在工程设计中发挥重要作用。
高等结构动力学具有很强的理论性和实践性,对于工程技术人员来说,掌握高等结构动力学的基本理论和方法具有重要意义。
二、高等结构动力学的研究方法和应用高等结构动力学主要采用数学建模、数值分析和实验研究等方法进行研究。
数学建模是将实际问题抽象为数学模型,以便于进行理论分析;数值分析是通过计算机模拟和计算,求解数学模型,得到结构在动力载荷作用下的响应;实验研究是通过实验设备和仪器,对结构进行实际测试,以验证理论分析和数值计算的结果。
高等结构动力学的应用领域非常广泛,包括建筑结构、机械结构、航空航天结构、桥梁结构等。
在实际工程中,通过应用高等结构动力学的理论和方法,可以有效地指导工程设计和施工,提高工程质量和安全性。
三、高等结构动力学的大作业要求和内容高等结构动力学的大作业通常要求学生具备一定的理论基础和实践能力,能够独立完成结构动力学的分析和计算。
大作业的内容主要包括以下几个方面:1.对给定的结构进行数学建模和动力学分析;2.采用数值分析方法,求解结构的动力响应;3.对结构进行稳定性分析和疲劳寿命预测;4.根据计算结果,对结构进行优化设计,以提高其性能。
四、高等结构动力学大作业的完成方法和技巧1.熟悉课程教材,掌握高等结构动力学的基本理论和方法;2.根据题目要求,选择合适的数学建模方法和数值分析方法;3.认真分析题目,确定计算模型的边界条件和初始条件;4.采用适当的计算机软件或编程语言进行数值计算;5.分析计算结果,编写完整的计算报告。
《高等结构动力学》课程大作业姓名:学号:电话:二〇二〇年十二月目录三层建筑物动力学建模与分析......................................................................................................... 一.研究对象..................................................................................................................................... 二.研究方案.....................................................................................................................................2.1、研究目的............................................................................................................................2.2、研究方案............................................................................................................................ 三.结构动力学建模.........................................................................................................................3.1.模型简化...............................................................................................................................3.2、结构动力学建模................................................................................................................建模方法一:层模型.........................................................................................................建模方法二:杆系模型..................................................................................................... 四.动力学特性分析.........................................................................................................................4.1.固有频率与固有模态...........................................................................................................4.2.阻尼矩阵...............................................................................................................................五.动力学响应分析...........................................................................................................................5.1.结构在EL Centro地震波下的反应 .....................................................................................5.1.1.基于Runge-Kutta方法的动力学响应(方法1)...................................................5.1.2.基于中心差分法方法的动力学响应(方法2).....................................................5.2.结构在风载荷下的反应.......................................................................................................三层建筑物动力学建模与分析一.研究对象在农村很多自建房都为三层结构,大多为自主设计,在地震中许多自建房由于地基不稳、结构和材料等原因损坏,现将三层混泥土结构房屋作为研究对象,进行动力学建模,分析建筑物在地震、风载荷激励下的响应。
研究生课程考核试卷
(适用于课程论文、提交报告)
科目:结构动力学大作业教师:刘纲
姓名:刘亚南学号:20131613144 专业:建筑与土木工程类别:专业
上课时间:2013 年11 月至2014 年1 月
考生成绩:
卷面成绩平时成绩课程综合成绩阅卷评语:
阅卷教师(签名)
重庆大学研究生院制
土木工程学院2013级硕士研究生考试试题
科目名称:结构动力学考试日期:2014年1月总分:20分
1、按规定设计一个2跨3层钢筋混凝土平面框架结构(部分要求如附件名单所示;未作规定部分自定)。
根据所设计的结构参数,求该结构的一致质量矩阵、一致刚度矩阵;
2、至少采用两种方法求该框架结构的频率和振型;
3、输入地震波(地震波要求如附件名单所示),采用时程分析法,利用有限元软件或自编程序求出该框架结构各层的线性位移时程反应。
要求给出:
(1)框架结构图,并给出一致质量矩阵和一致刚度矩阵;
(2)出两种方法名称及对应的频率和振型;
(3)输入地震波的波形图,计算所得各楼层位移反应时程图。
结构动力学-刘亚南(20131613144)
目录
题目一
1、框架设计 (2)
2、结构的一致质量矩阵 (3)
3、结构的一致刚度矩阵 (6)
题目二
1、建立框架结构的运动微分方程 (10)
2、用Rayleigh法求近似基频 (10)
3、用Stodola法求频率 (12)
题目三
1、框架资料 (15)
2、分析方法 (15)
3、具体操作步骤 (16)
4、地震波的波形图 (21)
5、时程反应图 (21)
第1页/共26页。
结构动力学作业姓名:学号:目录1.力插值法 (1)1.1分段常数插值法 (1)1.2分段线性插值法 (4)2.加速度插值法 (7)2.1常加速度法 (7)2.2线加速度法 (9)附录 (12)分段常数插值法源程序 (12)分段线性插值法源程序 (12)常加速度法源程序 (13)线加速度法源程序 (13)1.力插值法力插值法对结构的外荷载进行插值,分为分段常数插值法和分段线性插值法,这两种方法均适用于线性结构的动力反应计算。
1.1分段常数插值法图1-1为一个单自由度无阻尼系统,结构的刚度为k ,质量为m ,位移为y (t ),施加的外力为P (t )。
图1-2为矩形脉冲荷载的示意图,图中t d 表示作用的时间,P 0表示脉冲荷载的大小。
图1-1 单自由度无阻尼系统示意图图1-2 矩形脉冲荷载示意图对于一个满足静止初始条件的无阻尼单自由度体系来说,当施加一个t d 时间的矩形脉冲荷载,此时结构在t d 时间内的位移反应可以用杜哈梅积分得到:0()sin ()2 (1cos )(1cos ) (0)tst st d P y t t d m ty t y t t Tωττωπω=-=-=-≤≤⎰(1-1)如果结构本身有初始的位移和速度,那么叠加上结构自由振动的部分,结构的位移反应为:02()cos sin (1cos) (0)st d y ty t y t t y t t Tπωωω=++-≤≤& (1-2)图1-3 分段常数插值法微段示意图对于施加于结构任意大小的力,将其划分为Δt 的微段,每一段的荷载都为一个常数(每段相当于一个矩形的脉冲荷载),如图1-3所示,则将每一段的位移和速度写成增量的形式为:1cos t sin t (1cos t)iii i y P y y kωωωω+=∆+∆+-∆& (1-3)i+1/sin t cos t sin t iii y P y y kωωωωω=-∆+∆+∆&& (1-4)程序流程图如下i+1cos t sin t (1cos t)iii y P y y kωωωω=∆+∆+-∆i+1/sin t cos t sin ti i i y Py y kωωωωω=-∆+∆+∆图1-4 分段常数插值法流程图根据流程图可以编写相应的算法,利用MATLAB 进行编程,程序源代码见附录。
为了验证程序的正确性,本文选取的以下的例题进行验证。
对于一个单自由度的无阻尼结构,当其受到一个周期荷载时,其结构响应分为稳态解和瞬态解,由于没有阻尼的影响,其瞬态解并不会衰减,其理论表达式为:021()()(sin sin )1p x t t t k ωβωβ=-- (1-5)式中,()x t 为位移响应,0p 为激励,k 为刚度,β为荷载频率与固有振动频率之比,ω为荷载频率,ω为结构固有频率。
现令0p 为1,k 为1,则ω为1,ω取为2/3。
程序求得的解与解析解对比如图1-5所示(由于理论解与程序基本重合,所以将理论解乘以-1,方便比较):位移y时间ta )位移速度v时间tb )速度图1-5 分段常数插值法结果验证由图1-5可知理论解与程序算得的解基本重合,可以验证程序的准确性。
1.2分段线性插值法与分段常数插值法不同,分段线性插值法将每一微段的力当成一个线性的直线,对于每一个微段,可看成一个矩形和一个三角形脉冲的叠加。
图1-6为分段线性插值微段示意图。
图1-6分段线性插值法微段示意图对于无阻尼的体系,后一个时间步的位移和速度可由前一个时间步相应的值求得:11cos sin (1cos )(1sin )ii i i i y P P y y t t t t k k tωωωωωω+∆=∆+∆+-∆+-∆∆&(1-6) 11/sin cos sin (1cos )ii i i iy P P y y t t t t k k tωωωωωωω+∆=-∆+∆+∆+-∆∆&& (1-7) 分段线性插值法的流程图如图1-7所示,与分段常数插值法仅仅是迭代的方式有所不一样。
11cos sin (1cos )(1sin )ii i i i y P P y y t t t t k k tωωωωωω+∆=∆+∆+-∆+-∆∆11/sin cos sin (1cos )i i i i i y P P y y t t t t k k tωωωωωωω+∆=-∆+∆+∆+-∆∆图1-7 分段线性插值法流程图程序源代码见附录,同样利用1.1节的算例进行验证,所得的结果如图1-8所示。
位移y时间ta )位移速度v时间tb )速度图1-8 分段线性插值法结果验证由上图可知程序的正确性。
2.加速度插值法加速度插值法也叫逐步积分法,其对加速度进行插值,可分为常加速度法和线加速度法。
2.1常加速度法图2-1常加速度法微段示意图对于一个单自由度结构,其运动方程为:my()y()()()t c t ky t p t ++=&&& (2-1)将式(1-1)转变为增量方程:m y c y k y p ∆+∆+∆=∆&&&(2-2)在通过逐步积分,将时间转化为一系列微小的时间段t ∆ ,如图2-1所示,现令111()()2i i i i y t y y t t t ++=+<≤&&&&&&,则t 时间的速度可表示为:111()(()())21()()(()())2i i t ti i t t i i i y t dt y t y t dty t y t y t y t t++=+-=+∆⎰⎰&&&&&&&&&&&&令t =t i +1,则i +1时刻速度可以表示为:111()2i i i i y y y y t ++=++∆&&&&&&(2-3)同理,位移可以表示为:2111()4i i i i i y y y t y y t ++=+∆++∆&&&&&(2-4)将式(2-3)、(2-4)代入式(2-1),即:1111my i i i i cy ky p ++++++=&&&(2-5)此时,式(2-5)中只有1i y +&&为未知变量,可直接求出1i y +&&,之后再利用式(2-3)、(2-4),可求出t i +1时刻的速度与位移。
算法的流程图如下所示:i<n输出y n 、 v 结束0243y t =∆t t∆∆*4(2)2i i i i mP P c y my t∆=∆+++∆22i i iy y y t∆=∆-∆24()2i i i i y y y t y t ∆=∆-∆-∆图2-2 常加速度法流程图算例验证的结果如下图所示,说明了该程序的正确性。
由于需要对加速度进行插值,此处增加了加速度验证。
位移y时间ta )位移速度v时间tb )速度加速度a时间tc )加速度图2-3 常加速法结果验证2.2线加速度法线加速度法与常加速度法原理类似,其速度与位移的增量方程与常加速度法对应的方程略有不同,图2-4为线加速度法微段示意图。
a )位移b )速度图2-4线加速度法微段示意图关于具体原理不在赘述,下图为线加速度法的流程图。
将荷载作用的时间划分为n 个分段,并计算263()()()()k t k t m c t t t=++∆∆6()()[()3()]()[3()()]2tP t P t m y t y t c t y t y t t ∆∆=∆++++∆/y P k∆=∆266()()()3()()y t y t y t y tt t∆=∆--∆∆3()()3()()2ty t y t y t y t t ∆∆=∆--∆0002332()2y y y t t=-∆∆图2-5 线加速度法流程图算例验证的结果如图2-6所示。
位移y时间ta )位移速度v时间tb )速度加速度a时间tc )加速度图2-6 线加速法结果验证附录分段常数插值法源程序function x=inter_force_constant(p,w,dt,k,v0,y0)%分段常系数插值法%p代表输入的力,w为结构基本频率,dt为时间间隔,k为结构刚度%v0为初始的速度,y0为初始的位移%输出的矩阵第一列代表时间,第二列代表位移,第三列代表速度[r,~]=size(p);x=NaN(r,3);x(:,1)=p(:,1);x(1,2)=y0;x(1,3)=v0;for i=1:r-1x(i+1,2)=x(i,2)*cos(w*dt)+x(i,3)/w*sin(w*dt)+p(i,2)/k*(1-cos(w*dt));x(i+1,3)=(-x(i,2)*sin(w*dt)+x(i,3)/w*cos(w*dt)+p(i,2)/k*sin(w*dt))*w;end分段线性插值法源程序function x=inter_force_line(p,w,dt,k,v0,y0)%分段线性插值法%p代表输入的力,w为结构基本频率,dt为时间间隔,k为结构刚度%v0为初始的速度,y0为初始的位移%输出的矩阵第一列代表时间,第二列代表位移,第三列代表速度[r,~]=size(p);x=NaN(r,3);x(:,1)=p(:,1);x(1,2)=y0;x(1,3)=v0;for i=1:r-1x(i+1,2)=x(i,2)*cos(w*dt)+x(i,3)/w*sin(w*dt)+p(i,2)/k*(1-cos(w*dt))+(p(i+1,2)-p(i,2))/k/w/dt*(w*dt-sin(w*dt));x(i+1,3)=(-x(i,2)*sin(w*dt)+x(i,3)/w*cos(w*dt)+p(i,2)/k*sin(w*dt)+(p(i+1,2)-p(i,2))/k/w/dt*(1-cos(w*dt)))*w;end常加速度法源程序function x=inter_a_constant(p,w,m,keci,dt,v0,y0,k)%p代表输入的荷载,w为结构基本频率,keci为阻尼比,dt为时间间隔,m为结构质量,k 为结构刚度%v0为初始的速度,y0为初始的位移%输出的矩阵第一列代表时间,第二列代表位移,第三列代表速度,第四列代表加速度[r,~]=size(p);x=NaN(r,4);x(:,1)=p(:,1);x(1,2)=y0;x(1,3)=v0;x(1,4)=4/3/dt/dt*y0;c=2*keci*w;for i=1:r-1K=k+2*c/dt+4*m/dt/dt;dP=p(i+1,2)-p(i,2)+(4*m/dt+2*c)*x(i,3)+2*m*x(i,4);dY=dP/K;dV=2/dt*dY-2*x(i,3);dA=4/dt/dt*(dY-x(i,3)*dt)-2*x(i,4);x(i+1,2)=x(i,2)+dY;x(i+1,3)=x(i,3)+dV;x(i+1,4)=x(i,4)+dA;end线加速度法源程序function x=inter_a_line(p,w,m,keci,dt,v0,y0,k)%p代表输入的荷载,w为结构基本频率,keci为阻尼比,dt为时间间隔,m为结构质量,k 为结构刚度%v0为初始的速度,y0为初始的位移%输出的矩阵第一列代表时间,第二列代表位移,第三列代表速度,第四列代表加速度[r,~]=size(p);x=NaN(r,4);x(:,1)=p(:,1);x(1,2)=y0;x(1,3)=v0;x(1,4)=3/2/dt/dt*y0-3/2/dt*v0;c=2*keci*w;for i=1:r-1K=k+3*c/dt+6*m/dt/dt;dP=p(i+1,2)-p(i,2)+m*(6/dt*x(i,3)+3*x(i,4))+c*(3*x(i,3)+dt/2*x(i,4));dY=dP/K;dV=3/dt*dY-3*x(i,3)-dt/2*x(i,4);dA=6/dt/dt*dY-6/dt*x(i,3)-3*x(i,4);x(i+1,2)=x(i,2)+dY;x(i+1,3)=x(i,3)+dV;x(i+1,4)=x(i,4)+dA;end。