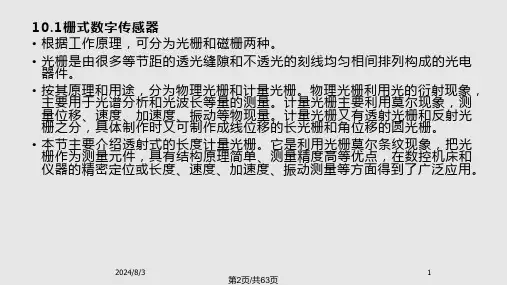
数字式位置传感器
- 格式:ppt
- 大小:13.53 MB
- 文档页数:125

传感器应用技术智慧树知到课后章节答案2023年下淄博职业学院淄博职业学院项目一测试1.属于传感器静态特性指标的是()A:临界频率 B:灵敏度 C:阻尼比 D:固有频率答案:灵敏度2.在传感器及检测系统的静态特性指标中,表达其对输入量变化的反应能力的是()A:重复性 B:量程 C:灵敏度 D:线性度答案:灵敏度3.传感器中直接感受被测量的部分是()A:转换元件 B:敏感元件 C:转换电路 D:调理电路答案:敏感元件4.下列指标中,属于传感器动态特性指标的是()A:过载能力 B:线性度 C:幅频特性 D:灵敏度答案:幅频特性5.传感技术的研究内容主要包括:()A:信息处理 B:信息获取 C:信息传输 D:信息转换答案:信息获取;信息传输;信息转换项目二测试1.欲测量应力选择的传感器是()A:光栅式 B:应变式 C:压阻式 D:霍尔式答案:应变式2.当应变片的主轴线方向与试件轴线方向一致,且试件轴线上受一维应力作用时,应变片灵敏系数K的定义是()。
A:应变片电阻相对变化与试件主应力方向的应变之比 B:应变片电阻与试件主应力方向的应变之比 C:应变片电阻相对变化与试件作用力之比 D:应变片电阻相对变化与试件主应力之比答案:应变片电阻相对变化与试件主应力方向的应变之比3.由()、应变片以及一些附件(补偿元件、保护罩等)组成的装置称为应变式传感器。
A:敏感元件 B:信号采集电路 C:调理电路 D:弹性元件答案:弹性元件4.在金属于箔式应变片差动单桥测力实验中不需要的实验设备是()。
A:低通滤波器 B:差动放大器 C:电压表 D:直流稳压电源答案:低通滤波器5.下列那一个不属于电位器式传感器的特点()A:分辨力高B:受环境因素影响小 C:结构简单尺寸小 D:输出信号大答案:分辨力高项目三测试1.在平行极板电容传感器的输入被测量与输出电容值之间的关系中,()是线性的关系。
A:变极距型 B:变面积型 C:变介电常数型 D:其余选项都不对答案:变面积型2.为了减小电容式传感器的测量非线性误差,我们应该将两个相同的电容式传感器,联接成()形式。
数字式传感器与模拟式传感器的区别数字式传感器的性能区别于模拟式汽车衡,主要有以下几点:(1)解决模拟式传感器信号弱的问题模拟式传感器的输出信号最大一般在几十毫伏,最低时只有百万分之几毫伏。
在电缆传输这些弱信号过程中,很容易受到干扰,从而造成系统工作不稳定或计量性能降低。
而数字式传感器的输出信号均在3~4V左右,其抗干扰能力远大于模拟信号的百万倍。
(2)解决射频干扰问题模拟式称重传感器的低电压信号极易受到电子干扰及其它天线电信号的干扰,而数字式称重传感器在设计时已考虑到这些抗干扰能力,它们可以在高干扰区域,并保证计量性能。
(3)解决防潮、防腐问题数字式传感器采用100%不锈钢焊接壳体。
密封、防水、防潮湿、防腐蚀,适用于各种恶劣工作环境,计量性能不受任何影响,防护等级达到IP68。
(4)解决防雷击问题数字式传感器具有防雷击和大电流放电能力,在室外安装使用时,这一点尤其重要。
METTLER-TOLEDO数字式汽车衡系统通过美国权威机构Lightning Technologies,INC的雷击测试。
(5)解决偏载/温度影响问题数字式称重传感器能自动补偿和调整因偏载和温度变化而产生影响。
(6)解决时间效应—蠕变问题当负荷时间加在-称重传感器上时,其输出常有较大变化,数字式称重传感器通过内部微处理器里的软件,自动补偿了蠕变。
(7)数字式汽车衡称重精度、稳定性和可靠性更高,减少模拟式汽车衡经常引起的误差由于经校正后的称重数据是以数字形式存储在每个传感器内部的,因此就减少了模拟信号引起的积累误差。
这些误差通常都是由于模拟信号在传输过程中由接头、接线排(端子)、电位器、开关及长电缆等因素造成的。
数字式称重传感器的补偿/修正参数存储在传感器内部的永久性存储器中,因此,省掉了开关/电位器等元器件。
(8)具有自诊断功能数字式传感器具有自诊断功能。
它不断对内部工作状况进行检测,当检测到出现故障时,会发出错误代码,这就大大降低了漏检故障的可能性,这也是模拟式称重传感器无法做到的。
传感器应用技术智慧树知到期末考试答案章节题库2024年淄博职业学院1.MQN型气敏电阻可测量()的浓度,TiO2型气敏电阻的浓度。
答案:锅炉烟道中剩余的氧气###气体打火机间的有害气体2.电感式传感器可以对()等物理量进行测量。
答案:位移###振动###压力###流量3.传感技术的作用主要体现在:()。
答案:传感技术在系统安全经济运行监测中得到了广泛应用###传感技术的完善和发展推动着现代科学技术的进步###传感技术及装置是自动化系统不可缺少的组成部分###传感技术是产品检验和质量控制的重要手段4.将超声波(机械振动波)转换成电信号是利用压电材料的压电效应;蜂鸣器中发出“嘀……嘀……”声的压电片发声原理是利用压电材料的逆压电效应。
答案:对5.有一温度计,它的测量范围为0~200℃,准确度为0.5级,当示值为20℃时的示值相对误差为5%,100℃时的示值相对误差为1℃。
答案:对6.欲探测埋藏在地下的金银财宝,应选择直径为500mm左右的电涡流探头。
欲测量油管表面和细小裂纹,应选择直径为5mm左右的探头。
答案:对7.光敏二极管属于内光电效应,光电池属于光生伏特效应。
答案:对8.对处于钢板深部的缺陷宜采用超声波探伤;对处于钢板表面的缺陷宜采用电涡流探伤。
答案:对9.用压电式加速度计及电荷放大器测量振动加速度,若传感器的灵敏度为70pC/g(g为重力加速度),电荷放大器灵敏度为10mV/pC,试确定输入3g(平均值)加速度时,电荷放大器的输出电压(平均值,不考虑正负号);答:2100mV。
并计算此时该电荷放大器的反馈电容Cf 。
答:100pF 答案:对10.大面积钢板探伤时,耦合剂应选自来水为宜;机床床身探伤时,耦合剂应选机油为宜;给人体做B超时,耦合剂应选液体石蜡。
答案:对11.公式EH=KHIBcosq 中的角q 是指答案:磁力线与霍尔薄片的垂线之间的夹角12.答案:(a)和 (d)13.为了得到尽可能大的电荷输出,我们应该将多个压电晶片()使用。

文件No.PS※※-OMT0001CN-C数字式位置传感器ISA3-※※A/B-※·开关2输出型OUT1:距离检测OUT2:压力检测 or 距离检测二选一使用前 安全注意事项 2关于产品 产品特征 7型式表示·型号体系 8 产品各部分名称及功能 14规格15规格表(ISA3) (15)规格表(减压阀) (17)规格表(2通电磁阀) (17)特性图 (18)外形尺寸图 (21)设置方法 安装.设置28配管方法 (28)设置方法 (31)配线方法 (36)构成图 (41)使用方法 设定方法概要 44测量模式 (45)临界值的设定 47 OUT1:临界值、OUT2:压力设定值变更模式 (47)OUT1出厂时的设定状态 (47)OUT2出厂时的设定状态 (48)设定前的准备 (49)设定方法 (49)功能设定 50功能选择模式 (50)出厂时的设定状态 (50)键盘锁定(设定密码) 64故障时 维护 65忘记密码的情况 66故障一览表67报警显示 (68)供给压力和显示的关系 (69)安全注意事项此处所示的注意事项是为了确保您能安全正确地使用本产品,预先防止对您和他人造成危害和伤害而制定的。
这些注意事项,按照危害和伤害的大小及紧急程度分为“注意”“警告”“危险”三个等级。
无论哪个等级都是与安全相关的重要内容,所以除了遵守国际规格(ISO/IEC)、日本工业规格(JIS)※1)以及其他安全法规※2)外,这些内容也请务必遵守。*1) ISO 4414: Pneumatic fluid power -- General rules relating to systemsISO 4413: Hydraulic fluid power -- General rules relating to systemsIEC 60204-1: Safety of machinery -- Electrical equipment of machines (Part 1: General requirements) ISO 10218: Manipulating industrial robots-SafetyJIS B 8370: 空气压系统通则JIS B 8361: 油压系统通则JIS B 9960-1: 机械类的安全性-机械的电气装置(第1部:一般要求事項)JIS B 8433: 产业用操作机器人-安全性等*2) 劳动安全卫生法 等注意 误操作时,有人员受伤的风险,以及物品损坏的风险。警告 误操作时,有人员受到重大伤害甚至死亡的风险。
位移传感器一、简介位移传感器又称为线性传感器,是一种属于金属感应的线性器件,传感器的作用是把各种被测物理量转换为电量。
在生产过程中,位移的测量一般分为测量实物尺寸和机械位移两种。
按被测变量变换的形式不同,位移传感器可分为模拟式和数字式两种。
模拟式又可分为物性型和结构型两种。
常用位移传感器以模拟式结构型居多,包括电位器式位移传感器、电感式位移传感器、自整角机、电容式位移传感器、电涡流式位移传感器、霍尔式位移传感器等。
数字式位移传感器的一个重要优点是便于将信号直接送入计算机系统。
这种传感器发展迅速,应用日益广泛。
位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。
小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。
其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。
二、工作原理电位器式位移传感器,它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出。
普通直线电位器和圆形电位器都可分别用作直线位移和角位移传感器。
但是,为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。
电位器式位移传感器的可动电刷与被测物体相连。
物体的位移引起电位器移动端的电阻变化。
阻值的变化量反映了位移的量值,阻值的增加还是减小则表明了位移的方向。
通常在电位器上通以电源电压,以把电阻变化转换为电压输出。
线绕式电位器由于其电刷移动时电阻以匝电阻为阶梯而变化,其输出特性亦呈阶梯形。
如果这种位移传感器在伺服系统中用作位移反馈元件,则过大的阶跃电压会引起系统振荡。
因此在电位器的制作中应尽量减小每匝的电阻值。
电位器式传感器的另一个主要缺点是易磨损。
它的优点是:结构简单,输出信号大,使用方便,价格低廉。
位置传感器工作原理
位置传感器是一种用于测量物体位置的装置,它可以将物体的位置转换成电信号或数字信号,以便于计算机或控制系统进行处理。
位置传感器的工作原理主要包括接收信号、转换信号和输出信号三个步骤。
首先,位置传感器通过不同的方式接收物体的位置信息。
常见的位置传感器包括光电传感器、电容传感器、磁性传感器等。
光电传感器利用光电效应来检测物体的位置,当物体遮挡了光源和光电二极管之间的光线时,光电二极管的电阻值发生变化,从而产生电信号。
电容传感器则是通过测量物体与电容传感器之间的电容变化来获取位置信息。
而磁性传感器则是利用物体产生的磁场对传感器产生影响,从而检测物体的位置。
其次,位置传感器将接收到的位置信息转换成电信号或数字信号。
这一过程通常涉及到信号的放大、滤波和数字化处理。
信号放大可以增强传感器接收到的信号强度,使其更容易被处理和识别。
信号滤波则可以去除噪声干扰,提高信号的准确性和稳定性。
数字化处理则是将模拟信号转换成数字信号,以便于计算机或控制系统进行处理和分析。
最后,位置传感器将转换后的信号输出给计算机或控制系统。
这些信号可以是模拟信号,也可以是数字信号,根据不同的应用场景和需求来选择。
计算机或控制系统会根据接收到的信号来判断物体的位置,并进行相应的控制或处理。
总的来说,位置传感器的工作原理是通过接收、转换和输出信号来实现对物体位置的测量和控制。
不同类型的位置传感器有着不同的工作原理和特点,但其核心的工作原理都是类似的。
位置传感器在工业自动化、机器人控制、汽车导航等领域有着广泛的应用,为现代化生产和生活提供了便利和支持。