第五章 位置传感器与角度传感器
- 格式:ppt
- 大小:17.88 MB
- 文档页数:24
SVI_II_AP智能电气阀门定位器的原理和应用该智能电气阀门定位器的工作原理如下:1.位置传感器:位置传感器用于检测阀门的开度,并将检测到的位置信息转换为电信号。
常用的位置传感器有角度传感器和位移传感器等。
角度传感器通过测量阀门轴的旋转角度来获得阀门的开度信息;位移传感器则通过检测阀门的运动位移来获取相应的位置信号。
2.电动执行器:电动执行器是智能电气阀门定位器的关键部件,负责根据位置传感器的信号来控制阀门的开闭。
电动执行器一般由电机和传动机构组成,根据接收到的电信号来驱动阀门的开关动作。
通过调整电动执行器的工作电压,可以改变阀门的开度。
3.控制电路:控制电路是智能电气阀门定位器的中枢部件,负责接收位置传感器的信号并根据设定的控制策略来调节阀门的开闭。
控制电路一般包括信号调理电路、比例增益控制器、PID控制器等。
信号调理电路用于解析位置传感器的信号,将其转换为控制电路能够理解的形式;比例增益控制器和PID控制器用于根据反馈信号和设定值来调节电动执行器的工作,使阀门能够实现精确的开度控制。
1.流量调节:在管道流体控制系统中,阀门的开度大小直接决定了管道流量的大小。
智能电气阀门定位器通过精确的位置控制,可以实现阀门开度的精确调节,从而实现对流体流量的精确控制。
这在许多工业领域都是非常重要的,如化工、能源、水处理等。
2.流向控制:智能电气阀门定位器还可以用于控制管道流体的流向。
通过调节阀门的开度,可以改变流体进出管道的方向,实现流向的切换。
这在一些工业过程中,如液体混合、分配管道等,具有重要的应用价值。
3.阀门位置监测:智能电气阀门定位器还可以通过位置传感器监测阀门的实时位置,并提供相应的反馈信号。
通过与上位计算机系统的连接,可以实现对阀门位置的实时监测和数据采集,为工业控制系统提供重要的过程参数。
4.系统集成:智能电气阀门定位器可以通过与其他控制设备的连接,实现整个管道流体控制系统的集成控制。
可以与PLC、DCS等控制系统进行通信,实现远程控制和监测,提供更加智能化的控制解决方案。
第五部分数控机床位置检测与传感器件1.位置传感器件主要分类(1)直线和角位移传感器:a.直线位移传感器直线位移传感器用于测量工作台的位移,通常装在工作台侧面。
为了使传感器的热膨胀系数与机床床身的相同,要选择传感器的材料,否则会影响测量的准确性。
直线位移传感器还要避免油雾、冷却液和切屑等的污染。
b.角位移传感器是用来测量传动轴的角度位移的。
用角位移传感器测量直线位移时,要求它的测量值与工作台的直线位移有一定的对应关系,通常是将角位移传感器装在带动工作台移动的丝杠的端部。
位移传感器的输出只有两种形式,即模拟式或数字式;直线或角位移传感器也可能是绝对、半绝对或增量位移传感器。
(2)模拟式和数字式位移传感器:模拟传感器——传感器输出信号的强度产生连续的、逐渐的变化。
数字位移传感器——工作台位置变化时,位移传感器以电脉冲的形式产生一个数字式输出信号。
根据机床的最小设定单位,每移动相应的距离就产生一个脉冲。
(3)绝对、半绝对及增量位移传感器:绝对、增量传感器产生的信号,前者是一个绝对的位置数据.后者是相对于上一个位置的增最(相对)数据。
半绝对位移传感器大部分使用绝对角位移传感器测量丝杠的角位移,为了得到工作台的直线位移,需要采用一些附加的方法测定丝杠旋转的圈数。
2.精度的概念精度和分辨率是描述传感器件性能的重要指标。
传感器件的测量精度是其可以一致的、重复测出的最小单位;分辨率是指传感器件能辨别的一个物理量等分后的最小单位。
无论是直线位移传感器还是角位移传感器,精度都是指其测量工作台位移的精度,而不是传感器的分辨率。
另一方面,测量的精度并非工件的加工精度,工件的加工精度受很多因素的影响。
3.光栅位移检测装置光栅位移传感器基于莫尔条纹和光电效应将位移信号转变为电信号,有直线光栅和困光栅两种类型。
光栅位移检测装置的测量精度高,在大量程测长方面其精度仅低于激光式的测量精度;而对要求整困范围内高分辨率的困分度测量来说,光栅式测量装置是精度最高的一种。
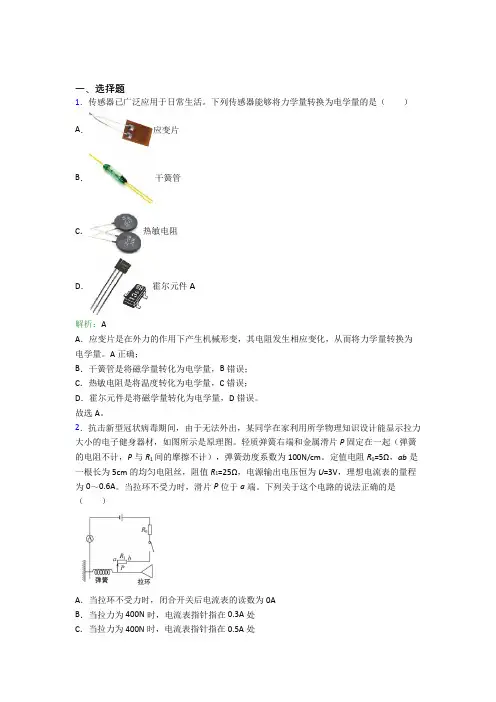
一、选择题1.传感器已广泛应用于日常生活。
下列传感器能够将力学量转换为电学量的是()A.应变片B.干簧管C.热敏电阻D.霍尔元件A解析:AA.应变片是在外力的作用下产生机械形变,其电阻发生相应变化,从而将力学量转换为电学量。
A正确;B.干簧管是将磁学量转化为电学量,B错误;C.热敏电阻是将温度转化为电学量,C错误;D.霍尔元件是将磁学量转化为电学量,D错误。
故选A。
2.抗击新型冠状病毒期间,由于无法外出,某同学在家利用所学物理知识设计能显示拉力大小的电子健身器材,如图所示是原理图。
轻质弹簧右端和金属滑片P固定在一起(弹簧的电阻不计,P与R1间的摩擦不计),弹簧劲度系数为100N/cm。
定值电阻R0=5Ω,ab是一根长为5cm的均匀电阻丝,阻值R1=25Ω,电源输出电压恒为U=3V,理想电流表的量程为0~0.6A。
当拉环不受力时,滑片P位于a端。
下列关于这个电路的说法正确的是()A.当拉环不受力时,闭合开关后电流表的读数为0AB.当拉力为400N时,电流表指针指在0.3A处C.当拉力为400N时,电流表指针指在0.5A处D .该健身器材能测量力的范围是0~400N B解析:B当拉环不受力时,滑片P 在a 端,由欧姆定律得I =01U R R +=0.1A 故A 错误;BC .拉力为400N 时,由F =k Δx ,则Δx =4cm对应的电阻为R aP =20Ω,R 1接入电路的电阻R Pb =5Ω,由欧姆定律得I ′=0pbU R R +=0.3A 故B 正确,C 错误;D .在P 移动到b 点时Δx ′=5cm ,由F =k Δx ,拉力最大F =500N故D 错误。
故选B 。
3.下列说法正确的是( )A .穿过闭合电路的磁通量发生变化时,这个闭合电路中就有感应电流产生B .只要导体相对磁场运动,导体中一定会产生感应电流C .话筒是一种能够将电信号转换为声音信号的传感器D .热敏电阻能把热量这个热学量转换为电阻这个电学量A解析:AA .穿过闭合电路的磁通量发生变化时,这个闭合电路中就有感应电流产生,选项A 正确;B .只有当闭合电路的部分导体切割磁感线运动时,导体中才会产生感应电流,选项B 错误;C .话筒是一种能够将声音信号转换为电信号的传感器,选项C 错误;D .热敏电阻是由半导体制成的,电阻随温度的升高而减小;从而把温度这个热学量转换为电阻这个电学量;故D 错误;故选A 。

位置传感器的工作原理及类型目录1.什么是位置传感器? (1)2.位置传感器按其原理主要分为几种? (2)3.位置传感器工作原理 (2)3.1.感应式位置传感器 (2)3.1.1.概述 (2)3.1.2.线性可变差动变压器,也就是1VDT (6)3.1.3.电感式接近传感器 (7)3.2.电容式位置传感器 (7)3.3.电位位置传感器 (8)3.4.基于涡流的位置传感器 (9)3.5.磁致伸缩位置传感器 (9)3.6.基于霍尔效应的磁性位置传感器 (10)3.7.光纤位置传感器 (10)3.8.光学位置传感器(激光位置传感器/激光雷达) (11)3.9.超声波位置传感器 (11)3.10.分离式光电位置传感器 (11)3.11.磁电感位置传感器 (12)今天给大家讲一下关于位置传感器相关的知识,主要是位置传感器工作原理、位置传感器有哪几种类型进行简单的讲解。
1什么是位置传感器?顾名思义,位置传感器检测物体的位置,也就是意味着位置传感器被引用到某个固定点或者说从某个固定的点或者位置引用,然后位置传感器提供位置的反馈。
确定位置的一种方法是使用“距离”,如两点之间的距离,例如从某个固定点行进或移动的距离,或者使用“旋转”(角运动)。
例如,机器人轮子的旋转以确定其沿地面行进的距离。
无论哪种方式,位置传感器都可以使用线性传感器检测物体的直线运动,或者使用旋转传感器检测物体的角运动。
位置传感器可以以不同的方式运行:提供根据物体位置变化的信号,然后通过信号变化来转换位移。
随着每一个动作,位置传感器都会发出一种冲动。
位置传感器通过对发射的脉冲进行计数来确定位移和位置。
当位置传感器与运动物体之间没有机械连接时,通过一个场提供信号。
北京优利威告诉您可以是涡流传感器的电磁场,电容传感器的静电场和磁阻、磁阻变化或霍尔效应传感器的磁感应场。
2.位置传感器按其原理主要分为几种?电位位置传感器(基于电阻)感应式位置传感器基于涡流的位置传感器电容式位置传感器磁致伸缩位置传感器基于霍尔效应的磁性位置传感器光纤位置传感器光学位置传感器超声波位置传感器3.位置传感器工作原理3.1.感应式位置传感器3.1.1.概述利用变压器等电磁感应元件,将变化的磁场转换为电信号,从而实现对物体位置的测量。

汽车传感器种类与应用场景汽车传感器是汽车电子控制系统的重要组成部分,它能够感知车辆的状态和周边环境信息,并将这些信息转化为电信号输入到电子控制单元(ECU)中,以实现对车辆的精确控制和智能化功能。
下面介绍几种常见的汽车传感器及其应用场景。
1.转速传感器转速传感器可以测量发动机的转速,一般通过检测发动机曲轴传动齿轮或飞轮的运动来实现。
它可以帮助ECU控制点火时机、燃油喷射时机和排气气门的开闭等,从而提高发动机燃烧效率和动力性能。
2.节气门位置传感器节气门位置传感器用于检测节气门的开启程度,通过测量气门开度来调整燃油喷射的量和点火时机,实现发动机的动力输出控制。
3.距离传感器距离传感器可以测量与车辆周围物体的距离,主要用于倒车雷达系统和自动驾驶技术中。
倒车雷达系统能够利用传感器探测到的障碍物距离和位置信息,发出声音或显示器上的警告,帮助驾驶员更好地掌握车辆后方情况。
自动驾驶技术中,车辆会利用传感器感知周围的障碍物,并根据传感器提供的数据进行自主导航和避障。
4.惯性传感器惯性传感器包括加速度传感器和陀螺仪,可以感知车辆的加速度、速度和方向等信息。
它们在车辆的动态稳定控制系统(ESP)和智能安全气囊系统中起着重要作用。
ESP系统利用加速度传感器来检测车辆的侧倾和横向加速度,以及陀螺仪来测量车辆的转向角速度,从而实现车辆稳定性的控制。
智能安全气囊系统则可以根据加速度传感器的数据,判断车辆是否发生碰撞,并在事故发生时及时充气以保护乘客安全。
5.环境传感器环境传感器包括温度传感器、湿度传感器、气压传感器等,可以感知周围环境的温度、湿度和气压等。
这些传感器广泛应用于空调系统、气囊系统和发动机控制系统中。
例如,温度传感器可以监测车内温度,并根据设定值调整空调系统的工作状态;湿度传感器可以感知车内湿度水平,以避免玻璃起雾;气压传感器可以测量进气管道中的空气压力,以使发动机控制系统实现更精确的燃油喷射控制。
6.角度传感器角度传感器可以测量转向系统和悬挂系统的角度,以实现驾驶辅助和悬挂控制。