新一代全系列移动测量系统介绍
- 格式:pptx
- 大小:62.46 MB
- 文档页数:64
产生背景-当前的信息需求随着时代的进步,地理信息表达方式已不再停留在文字符号所代表的数字化的基础上,而是朝着多媒体信息的方向发展。
地理信息系统也正朝着“大信息量”(关注对象越来越多,信息量越来越大)“高精度”(从10米->1米以内的精度演进)“可视化”(除了栅格数据和矢量数据外,还需要包含可量测的真三维图象和实景影象,从而使得对象的表达更为全面和直观。
)如此一来,就给空间信息的采集和更新手段提出了新的挑战。
传统测绘包括人工地面作业和航测遥感两种方式人工作业适用于工程级的碎步测量。
耗时误工,不能适应快速数据采集与更新的潮流,另外,也不能避免人工主观性误差以及在道路上作业带来的高劳动强度和危险性。
航测遥感(大面积测绘),但由于其属于垂直摄影,不能采集诸如路牌、交通标志这样的细小地物属性。
较长的数据处理周期和高昂的成本也使它无法适应于快速更新。
可见,传统的两种测绘方式是有着明显的局限性的。
但由此也催生了一种崭新的测绘科技的诞生,它就是------移动道路测量技术(Mobile Mapping Technology)。
1.1、系统简介1.2、工作环境(1)温度与湿度内:温度0℃~+30℃,相对湿度80%(25℃);外:温度-10℃~+50℃,相对湿度98%(25℃)(2)路况和车速3、4级公路及其以下等级道路上作业,车速不高于30km;2级以上公路上作业,车速不高于60km(3)能见度不小于200m1.3、系统组成1.3、系统组成--系统硬件—车顶平台(1)机械平台用于车顶设备的安装固定及线缆布设。
结构件强度满足系统设备安装及使用环境要求。
(2)温控防护罩具有自动调节温度功能,当温度低于5℃时自动加热,高于40℃时自动降温,用于保护CCD相机和摄像机。
(3)摄像机分辨率为702×574的彩色摄像机,置于温控防护罩内,拍摄方向为正前方,主要用于视频拍摄(4)CCD相机系统立体摄影测量影像获取设备。
GNSS测量原理及应用一、GNSS测量原理(以GPS为代表)(一)、GPS基本原理GPS导航系统的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。
要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。
而用户到卫星的距离则通过记录卫星信号传播到用户所经历的时间,再将其乘以光速得到(由于大气层电离层的干扰,这一距离并不是用户与卫星之间的真实距离,而是伪距(PR):当GPS卫星正常工作时,会不断地用1和0二进制码元组成的伪随机码(简称伪码)发射导航电文。
GPS系统使用的伪码一共有两种,分别是民用的C/A码和军用的P(Y)码。
C/A 码频率 1.023MHz,重复周期一毫秒,码间距1微秒,相当于300m;P码频率10.23MHz,重复周期266.4天,码间距0.1微秒,相当于30m。
而Y码是在P码的基础上形成的,保密性能更佳。
导航电文包括卫星星历、工作状况、时钟改正、电离层时延修正、大气折射修正等信息。
它是从卫星信号中解调制出来,以50b/s调制在载频上发射的。
导航电文每个主帧中包含5个子帧每帧长6s。
前三帧各10个字码;每三十秒重复一次,每小时更新一次。
后两帧共15000b。
导航电文中的内容主要有遥测码、转换码、第1、2、3数据块,其中最重要的则为星历数据。
当用户接受到导航电文时,提取出卫星时间并将其与自己的时钟做对比便可得知卫星与用户的距离,再利用导航电文中的卫星星历数据推算出卫星发射电文时所处位置,用户在WGS-84大地坐标系中的位置速度等信息便可得知。
可见GPS导航系统卫星部分的作用就是不断地发射导航电文。
然而,由于用户接受机使用的时钟与卫星星载时钟不可能总是同步,所以除了用户的三维坐标x、y、z外,还要引进一个Δt即卫星与接收机之间的时间差作为未知数,然后用4个方程将这4个未知数解出来。
所以如果想知道接收机所处的位置,至少要能接收到4个卫星的信号。
浅谈GPS—RTK技术及应用作者:王雷王玉明来源:《数字化用户》2013年第28期【摘要】本论文主要介绍了GPS-RTK测量技术的工作原理、工作流程、RTK技术在工程测量中的应用及RTK作业时需要注意相关问题。
GPS-RTK以其精度高、速度快和不存在误差积累等优点广泛应用于控制测量、地形图碎部测量、工程放样以及其他方面的测量。
【关键词】GPS RTK 测量技术一、引言全球定位系统Global Positioning System简称GPS是美国从上世纪70年代开始研制的新一代卫星导航与定位系统,它汇集了当代最先进的空间技术、通讯技术及微电子技术,是一种可以授时和测距的空间交会定点的导航系统,可向全球用户提供连续、实时、高精度的三维位置,三维速度和时间信息。
二、RTK的工作原理RTK (Real Time Kinematic)实时动态测量系统,是GPS 测量技术与数据传输技术的结合,是GPS 测量技术中的一个新突破,它改变了传统的测量模式,能够实时提供厘米级定位精度,能够在不通视的条件下远距离传输三维坐标。
RTK测量技术是经载波相位测量与数据传输技术相结合的以载波相位测量为依据的实时差分GPS测量技术。
RTK系统主要由基准站接收机、数据链及移动接收机三部分组成,通常是利用2台以上的GPS接收机同时接收卫星信号,其中一台安置在已知点上作为基准点,另一台用来测量未知点坐标称移动站,基准站根据该点的准确坐标可求出其他卫星的距离改正数并将这一改正数发送给移动站,移动站根据距离改正数来改正其定位结果,大大提高了定位精度,从而使实时提供测站点在指定坐标系中的三维定位结果达到厘米级精度。
RTK系统正常工作必须具备三个条件:第一,基准站和移动站同时接收5颗以上的GPS 卫星信号;第二,基准站与移动站同时接收卫星信号和基准站台发出的差分信号;第三,移动站要连续接收GPS卫星信号和基准站发出的差分信号。
RTK技术与其他测量模式相比,具有定位精度高、测量自动化、集成化程度高、数据处理能力强、操作简单、使用方便的等特点。
UniStrong MG838亚米级GPS新一代亚米级高精度GPS手持数据采集系统,其采用国际知名品牌的GPS空位模块及主板,性能卓越的掌上电脑(PDA ),将其融合为具有人体工程学设计的一体化三防主机,能满足移动数据采集在恶劣环境中所需的高性能,坚固和耐久的综合要求。
集思宝MG838主机使用WIndoes Mobile6.5操作系统,包含了易于用户掌握使用的,集成的软件组件。
同时该产品还可以扩展为其他用途,为第三方软件提供良好的数据输出工作。
集思宝MG838详细参数:集思宝MG838系统操作系统:Microsoft Windows Mobile 6.5CPU:Marvel ARM920T PXA310 624MHz内存: 256MB RAM,256MB NAND Flash语言支持:中文、英文集思宝MG838GPS接收类型: L1,C/A码,带载波相位平滑通道:12信道(包括W AAS通道)实时差分精度:< 0.5米(CEP)(外部源修正或SBAS)后差分处理:< 0.3米(CEP)静态精度(外接天线):平面 5mm+1ppm高程 10mm+1ppm冷启动:60s(无历书或实时时钟)温启动:45s(有历书但无实时时钟)或35s(有历书同时有实时时钟)热启动:20s(有历书或实时时钟以及最后一次定位小于2小时以内的)重捕获:1s集思宝MG838屏幕显示屏:CASIO 3.7寸户外屏,480×640 high (VGA),TFT,Touch Panel键盘:6个功能键,F1-F4,HOME键,Power键,五维方向键,夜视功能,Reset键集思宝MG838数据通讯扩展存储器:支持Micro SD(最大8G)接口:Mini USB2.0接口,充电接口GPS外接天线:SMB接口通讯接口:SIM卡插槽,内置SIMENS MC75i通讯模块,支持全球四频。
蓝牙:Bluetooth V1.2 Class 2 支持EDR无线网络:支持WIFI功能无线LAN 802.11b/g集思宝MG838电源电源:内置7.4V 4200mAh锂电池工作时间:典型工作环境8小时以上充电时间:充电时间小于4小时,有充电指示灯集思宝MG838物理尺寸:215mm (长) × 97 mm(宽)×57 mm(高)重量:0.7 kg集思宝MG838环境工作温度:-20℃— +60℃存储温度:-30℃— +70℃抗震:1.2m自然跌落至地面ESD:接触放电:4KV,空气放电:8KV防水防尘:IP66集思宝MG838扩展功能摄像头:300万像素,支持闪光灯支持麦克风录音功能MG838亚米级GPS标配选件MG838主机(含电池)电源适配器USB电缆(一端USB一端MiniUSB)手写笔Micro SD卡(4G)及读卡器屏幕保护贴MG838配套光盘(包括配套软件等)包装盒(含内衬)保修卡合格证亚米级GPS集思宝MG838主要功能特点:专业的GPS模块,高精度亚米级单机定位国际专业品牌测量型GPS天线和定位主板,采用最新的ASIC芯片和COAST专业算法,比导航型主板搜星更迅速稳定,定位更精确可靠。
测量机器人:测量机器人可实现对目标的快速判别、锁定、跟踪、自动照准和高精度测量,可以在大范围内实施高效的遥控测量。
使您在遥控测量操作中的那些烦恼成为历史。
该系统由索佳新一代全站仪SRX和索佳超级目标捕捉系统组成。
超级目标捕捉系统由镜站端可发射扇形光束的RC遥控器和测站端SRX系列全站仪上的光束探测器组成;光束探测器能敏锐地感知RC遥控器所发出的瞬间光信号,并驱动全站仪快速地指向目标,对目标进行精确照准和测量。
系统内置智能方向传感器可以判别和锁定指定目标,实现对目标的智能跟踪。
超级目标捕捉系统驱动全站仪快速照准棱镜所在方位,并对目标实施高精度的自动照准和测量。
超级目标捕捉系统能够驱动全站仪自动照准和锁定目标棱镜,测量过程中移动棱镜时即使出现影响目标通视的障碍物(如建筑、树木、汽车等物体),仪器也能锁定目标棱镜,确保测量工作的正确进行。
在地形复杂的条件下作业时,测量人员只须注意脚下的路面,而不必太在意棱镜的姿态。
即使目标棱镜暂时失锁,只须在镜站方发出搜索指令,仪器便可快速地重新锁定目标。
即使镜站附近有其他反射棱镜也不会产生误测,超级目标捕捉系统会驱动全站仪锁定和照准正确的棱镜。
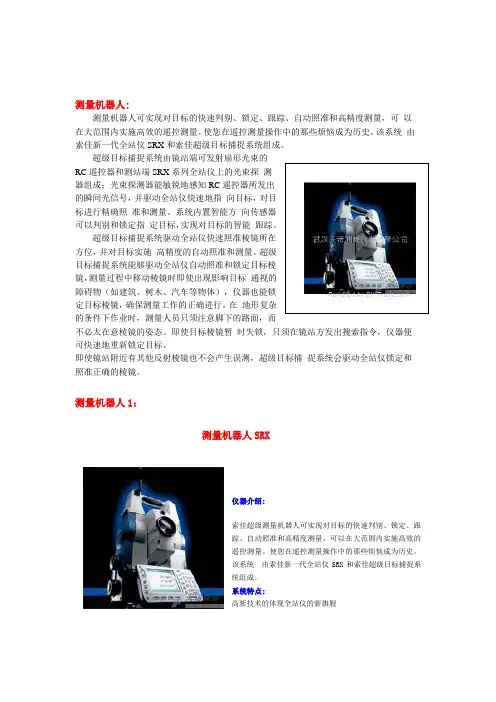
测量机器人1:测量机器人SRX仪器介绍:索佳超级测量机器人可实现对目标的快速判别、锁定、跟踪、自动照准和高精度测量,可以在大范围内实施高效的遥控测量。
使您在遥控测量操作中的那些烦恼成为历史。
该系统由索佳新一代全站仪SRX和索佳超级目标捕捉系统组成。
系统特点:高新技术的体现全站仪的新旗舰新一代高精度测距技术--RED-tech EX全球领先的突破性测角技术支持多种通讯接口完善的蓝牙通讯技术。
索佳超级测量机器人可实现对目标的快速判别、锁定、跟踪、自动照准和高精度测量,可以在大范围内实施高效的遥控测量。
使您在遥控测量操作中的那些烦恼成为历史。
该系统由索佳新一代全站仪SRX和索佳超级目标捕捉系统组成。
超级目标捕捉系统由镜站端可发射扇形光束的RC遥控器和测站端SRX系列全站仪上的光束探测器组成;光束探测器能敏锐地感知RC遥控器所发出的瞬间光信号,并驱动全站仪快速地指向目标,对目标进行精确照准和测量。
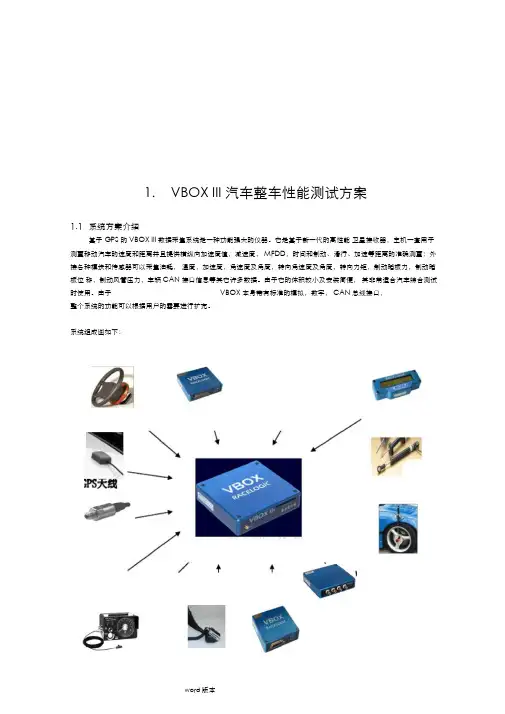
1.VBOX III 汽车整车性能测试方案1.1系统方案介绍基于GPS的VBOX III 数据采集系统是一种功能强大的仪器。
它是基于新一代的高性能卫星接收器,主机一套用于测量移动汽车的速度和距离并且提供横纵向加速度值,减速度,MFDD,时间和制动、滑行、加速等距离的准确测量;外接各种模块和传感器可以采集油耗,温度,加速度,角速度及角度,转向角速度及角度,转向力矩,制动踏板力,制动踏板位移,制动风管压力,车辆CAN 接口信息等其它许多数据。
由于它的体积较小及安装简便,其非常适合汽车综合测试时使用。
由于VBOX本身带有标准的模拟,数字,CAN总线接口,整个系统的功能可以根据用户的需要进行扩充。
系统组成图如下:系统配置:一.Racelogic 公司VBOX III 数据采集系统一套:1.VBOX IIIDGPS 主机(带配套软件)2.GPS磁性天线3.制动触发器4.电池组5.充电器6.多功能显示器+固定装置7.128M闪寸卡二.频率输入模块三.模拟量输入模块四.热电偶模块五.陀螺仪六.测力方向盘七.油耗仪八.制动踏板力传感器九.制动踏板位移传感器十.制动管路压力传感器十一.车轮增量传感器十二.发动机转速计十三.热电偶十四.热电阻(带变送器)十五.笔记本电脑十六.热敏打印机以上第二——十九项为可选项1.2可测量的参数的量程及精度:1.3特点:全套测量系统体积极小,安装简便迅速能完成国家标准要求的汽车动力性,经济性,操纵稳定性,制动性能等实验在线显示4 个测量参数各种测量或采集到的参数可以实时显示可根据要求设定各种不同的试验条件进行试验制动触发形式多样,使试验更加方便WINDOW操S 作界面的设定和分析软件,使用方便高精度、高可靠性,高耐振、抗冲击性能确保测试质量用GPS非接触式速度和距离测量现场即时打印功能,打印各个测量或采集到的参数,实现现场数据阅读大容量紧凑式闪存卡(CF卡)即时存储数据,以便后处理可扩展连接其他各种传感器绘制轨迹图,圈数定时1.4可进行的试验:滑行试验油耗试验爬陡坡试验最高车速试验加速性能试验制动性能试验操纵稳定性试验最小稳定车速试验最小转弯直径测量实验制动踏板力测量实验制动踏板行程测量实验制动管路压力测量实验汽车防抱制动系统性能实验温度测量实验里程,速度表校验等其它试验1.5可满足的国家标准:GB/T 12545 - 1990 汽车燃料消耗量GB/T 12547 - 1990 最低稳定车速GB/T 12536 - 1990 汽车滑行试验GB/T 12543 - 1990 汽车加速性能GB/T 12539 - 1990 汽车爬坡性能GB/T 12544 - 1990 汽车最高车速GB/T 12676 - 1999 汽车制动系统性能GB/T 6323 - 94 汽车操纵稳定性试验方法GB/T 12540 - 90 汽车最小转弯直径测定方法GB/T 13594 - 92 汽车防抱制动系统性能要求和试验方法1.6应用实例图片:VBOX II 在测试世界(芬兰)的应用:2.关于 Racelogic 公司 VBOX 产品概述GPS 技术在 1995 年就已经面世但是知道最近才足够精确用 于车辆测试 (见 GPS 的概述)。
移动测量技术一、移动测量“移动道路测量”是当今测绘界最为前沿的科技之一,代表着未来道路电子地图测制领域的发展主流。
它是在机动车上装配GPS(全球定位系统)、CCD(视频系统)、INS(惯性导航系统)或航位推算系统等先进的传感器和设备,在车辆的高速行进之中,快速采集道路及道路两旁地物的空间位置数据和属性数据,如:道路中心线或边线位置坐标、目标地物的位置坐标、路(车道)宽、桥(隧道)高、交通标志、坡度、道路设施等。
数据同步存储在车载计算机系统中,经事后编辑处理,形成内容丰富的道路空间信息数据库。
其工作原理如图1所示:二、移动测量系统及其功能(1)移动测量系统(MOBILE MAPPING SYSTEM,MMS),是当今测绘界最为前沿的科技之一,代表着未来道路电子地图测制领域的发展主流。
它是在机动车上装配GPS(全球定位系统)、CCD(视频系统)、INS(惯性导航系统)或航位推算系统等先进的传感器和设备,在车辆的高速行进之中,快速采集道路及道路两旁地物的空间位置数据和属性数据,如:道路中心线或边线位置坐标、目标地物的位置坐标、路(车道)宽、桥(隧道)高、交通标志、道路设施等。
数据同步存储在车载计算机系统中,经事后编辑处理,形成各种有用的专题数据成果,如导航电子地图等等。
另外,MMS本身所具备的汽车导航等功能还可以用于道路状况、道路设施、电力设施等的实时监控,以迅速发现变化,实现对原图的及时修测。
(2)MMS系统的主要功能Ⅰ、位置与角度测量通过GPS/CCD/INS的集成,既可从CCD立体影像对中提取目标点精确的绝对位置坐标,又可进行目标点间相对位置关系的解算。
这一功能可完成的测量任务有:道路中心线和边线坐标的测量;电线杆、交通标志、报警点、下水道出口等点状地物的坐标量测;房屋角点、街道边界、铺装路面的测量;道路宽度、桥梁涵洞宽度高度的测量等等。
同时,还可测量道路坡度、转弯半径等。
如图2所示:Ⅱ、属性记录通过CCD视频系统,连续全过程地记录道路及道路两旁地物属性,形成闭环的属性记录及检验系统,保证了地物属性记录的完整性和品质。
交联管内电缆偏心壁厚分层辨析系统X-Ray 8000NXT西科拉公司测偏仪最主要的优势●1995年和同类产品同时进入市场,而SIKORA市场占有率达90%,拥有如此高的市场占有率,是西科拉公司良好的产品品质、周到的售后服务及诚信等优势的体现。
●唯一使用回归分析技术,不要求使用者对仪器进行校准,也不需要预先输入被测体的参数。
仪器接通电源立即开始工作,不需要预热。
方便简单准确的检测。
●唯一在每一个扫描器上配备新一代的双接收器的测偏仪,保证仪器在任何激烈电缆抖动情况下也能进行精确可靠的检测。
(对于任何一条生产线,电缆抖动都是不可避免的。
X-Ray 8000NXT的双接收器能够有效地识别电缆抖动的振幅和频率,使得仪器在电缆抖动时也能进行精确的检测。
)●采用全新的门控技术控制X射线的发射,X射线的转换效率更高,操作温度更低,从而保护射线管。
门控技术的主要优势是让射线管只在扫描状态下工作,在交替式扫描方式下,射线管的工作时间比原测偏仪的减少一半,大大延长射线管的使用寿命。
射线管的期望寿命时间为5年。
一、系统的构造X-RAY 8000系统由测量器和数据处理装置两个基本部份构成1、测量器测量器的主要工作单元是两个互相垂直的行走式扫描器。
每个扫描器各包含有一个X射线发射管和一个X射线信号接收转换装置。
发射管和信号接收转换装置分别安装在一个U型框的对应的两端,系统工作时,U形框由步进马达驱动,以高精度的均匀速度进行移动扫描。
速度恒定对准确测量非常重要。
SIKORA采用高精度步进马达,不因负载扭距的改变而改变扫描速度,从而保证可靠的测量。
扫描速度X-RAY8000测偏仪的扫描速度是可以调变的。
根据生产线速度和被测电缆的外直径,仪器允许用户以11个速度级在每秒4毫米至每秒60毫米之间调变扫描速度,调变指令通过触摸屏幕输入仪器,除此之外不需要任何其它操作。
在调速之外,X-RAY8000还具有“限位扫描功能”,扫描器完成第1次扫描之后,仪器自动记忆电缆位置并把行程限定在被测电缆上下各10mm之间,比如说电缆直径为45mm,则仪器行程会自动限制在45±10mm之间。