平面体系自由度附约束
- 格式:doc
- 大小:45.50 KB
- 文档页数:7
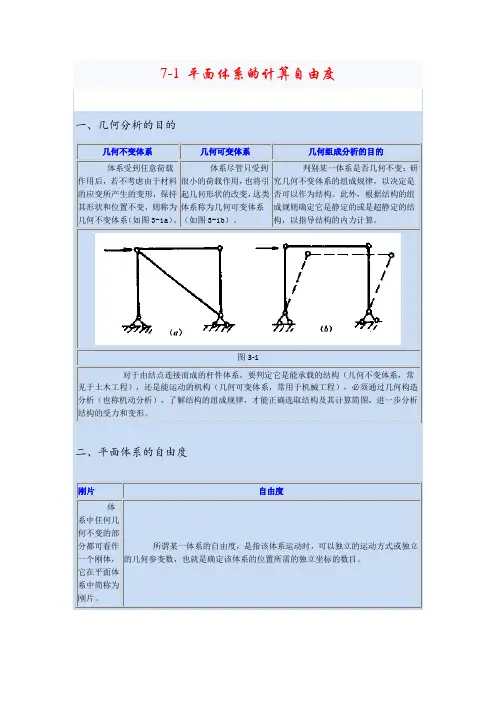
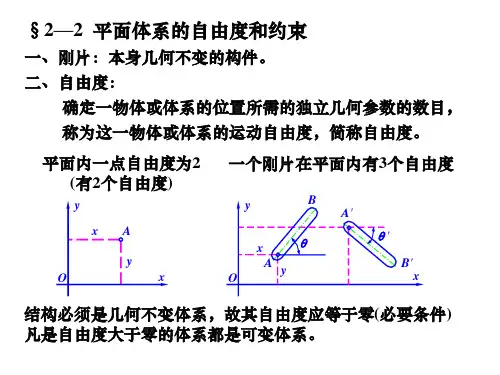
平面体系自由度和约束自由度:所谓体系的自由度,是指该体系运动时,用来确定其位置所需的独立坐标(或参变量)的个数。
如果一个体系的自由度大于零,则该体系就是几何可变体系。
(1)点的自由度:平面内一动点A,其位置需用两个坐标x和y来确定,所以一个点在平面内有两个自由度。
1.swf(2)刚片的自由度:一个刚片在平面内运动时,其位置将由其上任一点A的坐标x、y 和过点A的任一直线AB的倾角φ来确定,因此,一个刚片在平面内有三个自由度。
2.swf约束:约束是指能够减少自由度的装置(又称联系)。
减少一个自由度的装置,就称为一个约束(或联系)。
约束有两大类:支座约束和刚片间的约束。
1. 支座约束(1)滚轴支座:能限制刚片A点在垂直方向移动,但不能限制其水平方向移动和绕A 点的转动,减少了一个自由度,相当于一个约束。
3.swf(2)铰支座:能限制刚片A点在水平方向和竖直方向移动,但不能限制其绕A点的转动,减少了两个自由度,相当于两个约束。
4.swf(3)固定支座:能限制刚片在水平、竖直方向的移动和转动,使刚片的自由度减少为零,相当于三个约束。
5.swf2. 刚片间的联结约束(1)单铰约束:联结两个刚片的铰称为单铰。
两刚片在平面内独立的自由度个数为六个,用一个铰将刚片Ⅰ、Ⅱ联结起来,对刚片Ⅰ而言,其位置可由A点的坐标x、y和AB 线的倾角φ1来确定,因此其有三个自由度,刚片Ⅱ相对刚片Ⅰ只能绕A点转动,即两刚片间只保留了相对转角φ2,则由刚片Ⅰ、Ⅱ所组成的体系在平面内有四个自由度,则一个单铰约束减少了二个自由度。
一个单铰相当于两个约束。
6.swf(2)复铰约束:用一个铰同时联结三个或三个以上的刚片,则这种铰称为复铰。
设其中一刚片可沿x、y向移动和绕某点转动,则其余两刚片都只能绕其转动,因此各减少两个自由度。
象这种联结三刚片的复铰相当于两个单铰的作用,由此可见,联结n个刚片的复铰,相当于(n-1)个单铰的作用。
7.swf。
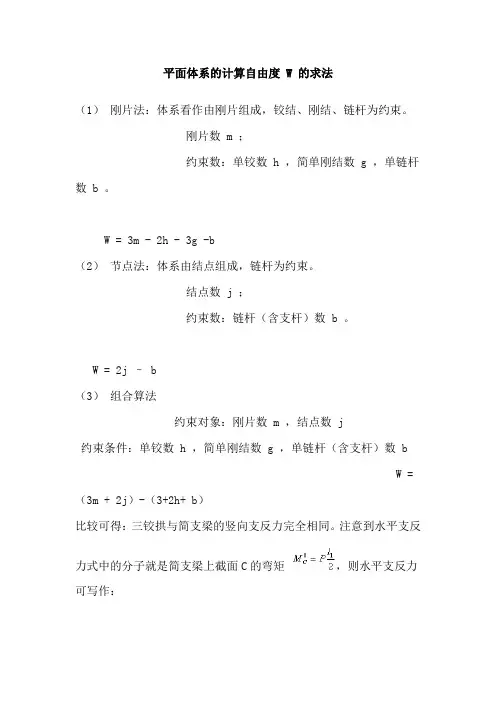
平面体系的计算自由度 W 的求法
(1)刚片法:体系看作由刚片组成,铰结、刚结、链杆为约束。
刚片数 m ;
约束数:单铰数 h ,简单刚结数 g ,单链杆数 b 。
W = 3m - 2h - 3g -b
(2)节点法:体系由结点组成,链杆为约束。
结点数 j ;
约束数:链杆(含支杆)数 b 。
W = 2j – b
(3)组合算法
约束对象:刚片数 m ,结点数 j
约束条件:单铰数 h ,简单刚结数 g ,单链杆(含支杆)数 b
W = (3m + 2j)-(3+2h+ b)
比较可得:三铰拱与简支梁的竖向支反力完全相同。
注意到水平支反
力式中的分子就是简支梁上截面C的弯矩,则水平支反力可写作:
综上所述,三铰拱在竖向荷载作用下,任一截面上的弯矩、剪力荷轴力的计算公式如下:
4.4.1 各种结构位移计算公式
:虚设单位荷载P=1作用下的结构的内力;
:实际荷载作用下的结构的内力
图乘法
位移公式:
4.5.2 常见图形的面积和形心
常见图形的形心和面积(图4.10)。
图4.10
以上图形的抛物线均为标准抛物线:抛物线的顶点处的切线都是与基线平行
4.5.3 应用图乘法时的几个具体问题
(2) 如果有一个图形为折线,则应分段考虑(图4.12)
图4.12
(3) 如果图形比较复杂,应根据弯矩图的叠加原理将图形分解为几个简单图形,分项计算后再进行叠加图4.13
图4.13
(图4.13b中A1与y1的乘积为负值;图4.13c中抛物线为非标准曲线)。
例5:试求出图4.16刚架结点B 的水平位移和转角,EI 为常数。