§4-2平面体系的自由度和约束
- 格式:ppt
- 大小:1.53 MB
- 文档页数:72
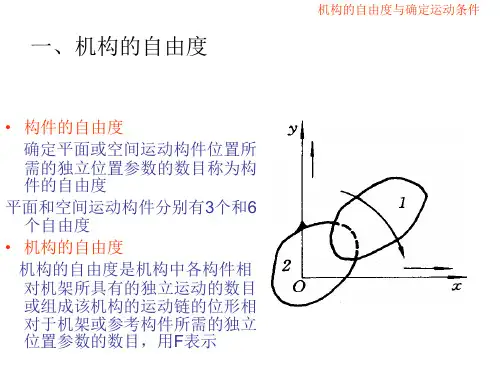
平面机构的自由度与运动分析一、平面机构的自由度平面机构是指机构中的构件只能在一个平面内运动的机构,它由多个连接杆、转动副和滑动副组成。
平面机构的自由度是指机构中能够独立变换位置的最小的连接杆数目,也可以理解为机构中独立的变量的数量。
对于平面机构,其自由度可以通过以下公式计算:自由度=3n-2j-h其中,n表示连接杆的数量,j表示驱动链的数量,h表示外部约束的数量。
根据上述公式可以看出,自由度与平面机构中连接杆的数量和驱动链和外部约束的数量有关。
连接杆的数量越多,机构的自由度就越大,可以实现更复杂的运动。
驱动链的数量越多,机构中的动力驱动器越多,自由度就越小,机构的运动变得更加确定。
外部约束的数量越多,机构中的约束条件就越多,自由度就越小,机构的运动也会变得更加确定。
二、平面机构的运动分析1.闭合链和链架分析:首先需要确定机构中的闭合链和链架,闭合链是指机构中连接杆形成一个封闭的回路,闭合链中的连接杆数目应该为n 或n-1,n是机构中的连接杆数量。
链架是指机构中的连接杆形成一个开放的链路。
通过分析闭合链和链架中的链接关系和约束条件,可以确定机构中构件的位置和运动方式。
2.位置和速度分析:根据机构的连接杆的长度和角度,可以通过几何方法或代数方法确定机构中构件的位置和速度分量。
通过分析连接杆的长度和角度的变化规律,可以推导出机构中构件的位置和速度随时间的变化关系。
3.加速度和动力学分析:根据机构中各个构件的位置和速度,可以通过几何方法或动力学方法计算构件的加速度和动力学特性。
通过分析机构中构件的加速度和动力学特性,可以确定机构中构件的运动稳定性和质量分布。
4.动力分析:对于需要携带负载或进行力学传动的机构,需要进行动力学分析,确定机构中各个构件的受力和承载能力。
通过分析机构中构件的受力情况,可以确定机构的设计参数和强度要求。
总结起来,平面机构的自由度与运动分析是确定机构中构件位置和运动状态的重要方法,通过分析机构中的闭合链和链架、构件的位置和速度、加速度和动力学特性,可以确定机构的运动方式和特性,为机构的设计和优化提供依据。
机械设计之平面机构自由度计算在机械设计中,平面机构是由几个刚性杆件和连接件组成的,用于转换或传递力、运动或位置的机器系统。
而平面机构的自由度是指机构中独立移动的自由度数量。
平面机构的自由度可以通过格里ュ布勒定理(Gruebler's criterion)来计算。
该定理表明平面机构的自由度等于总的刚接触约束数量减去约束其中一杆件上的铰链滑块轴承约束数量的总和,再减去总的铰链滑块轴承约束数量。
在计算平面机构的自由度时,首先需要明确机构的结构以及刚性杆件和连接件的数量。
然后,分别确定机构中的铰链、滑块和轴承的位置以及相互之间的约束。
接下来,需要计算总的刚接触约束数量。
刚接触约束是指通常由铰链、滑块和轴承组成的约束,可以通过刚性杆件和连接件之间的连接点来确定。
这些约束限制了杆件和连接件的相对运动。
然后,计算约束其中一杆件上的铰链滑块轴承约束数量的总和。
这些约束是指仅约束其中一杆件上的铰链、滑块和轴承约束。
通过计算这些约束的数量,可以得出约束其中一杆件上的铰链滑块轴承约束数量的总和。
最后,将总的刚接触约束数量减去约束其中一杆件上的铰链滑块轴承约束数量的总和,再减去总的铰链滑块轴承约束数量,即可得到平面机构的自由度数量。
需要注意的是,平面机构的自由度仅仅是指机构中独立移动的自由度数量,并不包括相对于机构整体移动的自由度。
例如,如果机构的一个铰链用于固定整个机构的位置,那么该铰链并不会增加机构的自由度。
总结起来,平面机构的自由度可以通过格里ュ布勒定理来计算。
计算过程包括确定机构中的铰链、滑块和轴承的位置以及相互之间的约束,计算总的刚接触约束数量,计算约束其中一杆件上的铰链滑块轴承约束数量的总和,计算总的铰链滑块轴承约束数量,最后将这些数量带入格里ュ布勒定理中计算得出平面机构的自由度数量。
平面体系自由度和约束自由度:所谓体系的自由度,是指该体系运动时,用来确定其位置所需的独立坐标(或参变量)的个数。
如果一个体系的自由度大于零,则该体系就是几何可变体系。
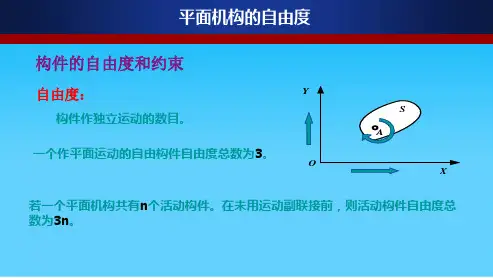
(1)点的自由度:平面内一动点A,其位置需用两个坐标x和y来确定,所以一个点在平面内有两个自由度。
1.swf(2)刚片的自由度:一个刚片在平面内运动时,其位置将由其上任一点A的坐标x、y 和过点A的任一直线AB的倾角φ来确定,因此,一个刚片在平面内有三个自由度。
2.swf约束:约束是指能够减少自由度的装置(又称联系)。
减少一个自由度的装置,就称为一个约束(或联系)。
约束有两大类:支座约束和刚片间的约束。
1. 支座约束(1)滚轴支座:能限制刚片A点在垂直方向移动,但不能限制其水平方向移动和绕A 点的转动,减少了一个自由度,相当于一个约束。
3.swf(2)铰支座:能限制刚片A点在水平方向和竖直方向移动,但不能限制其绕A点的转动,减少了两个自由度,相当于两个约束。
4.swf(3)固定支座:能限制刚片在水平、竖直方向的移动和转动,使刚片的自由度减少为零,相当于三个约束。
5.swf2. 刚片间的联结约束(1)单铰约束:联结两个刚片的铰称为单铰。
两刚片在平面内独立的自由度个数为六个,用一个铰将刚片Ⅰ、Ⅱ联结起来,对刚片Ⅰ而言,其位置可由A点的坐标x、y和AB 线的倾角φ1来确定,因此其有三个自由度,刚片Ⅱ相对刚片Ⅰ只能绕A点转动,即两刚片间只保留了相对转角φ2,则由刚片Ⅰ、Ⅱ所组成的体系在平面内有四个自由度,则一个单铰约束减少了二个自由度。
一个单铰相当于两个约束。
6.swf(2)复铰约束:用一个铰同时联结三个或三个以上的刚片,则这种铰称为复铰。
设其中一刚片可沿x、y向移动和绕某点转动,则其余两刚片都只能绕其转动,因此各减少两个自由度。
象这种联结三刚片的复铰相当于两个单铰的作用,由此可见,联结n个刚片的复铰,相当于(n-1)个单铰的作用。
7.swf。