椭圆弧等误差直线拟合的算法研究
- 格式:doc
- 大小:24.50 KB
- 文档页数:3
椭圆边值问题的galerkin法及最小二乘法处理本文主要介绍了椭圆边值问题Galerkin法和最小二乘法处理方法。
文章将从最小二乘法和Galerkin法的基本理论介绍开始,然后讨论椭圆边值问题的Galerkin法和最小二乘法处理,介绍这两种方法的优缺点,并分析椭圆边值问题的两种解决方案的适用性。
最后,提出对本文讨论的椭圆边值问题的Galerkin法和最小二乘法处理方法的建议和未来研究方向。
由于椭圆值问题的几何形状复杂性,解决它的有效方法是用一种有力的数值解决方案。
一般来说,最小二乘法和Galerkin法是被广泛用来解决椭圆边值问题的两种方法。
最小二乘法是一种常见的数值方法,它基于拟合最佳误差平方和,从而使预测函数离真实函数有最小差距。
它通常可以有效地拟合数据,但有时会得到不稳定的近似结果。
Galerkin法是另一种处理椭圆边值问题的有效方法,它将椭圆边值问题的解写成线性的函数组合的形式,以实现对问题的全局拟合。
它使用几何形状函数和拉普拉斯算子,使得可以近似地将椭圆边值问题拟合到一个线性方程组中,从而求出此方程组的解。
为了更准确地处理椭圆边值问题,我们可以结合使用最小二乘法和Galerkin法,即将真实的椭圆边值问题的解写成一个线性方程组,对这个方程组求解,然后用最小二乘法对其进行拟合。
这样可以使方程的解更加准确。
总的来说,最小二乘法的优点在于它简单易用,可以拟合数据,但缺点是拟合结果往往不稳定。
Galerkin法的优点是拟合的解决方案更加准确,但缺点是计算较复杂,消耗较多时间和空间。
为了选择更加合适的方案,要评估椭圆边值问题处理时最小二乘法和Galerkin法的可行性和有效性,并判断出哪种方法更加适合特定问题的处理。
本文讨论的椭圆边值问题的Galerkin法和最小二乘法处理方法各有优势,对椭圆边值问题的解决有较大的帮助,但还有一些可以改进的地方。
首先,在求解椭圆边值问题时,可以考虑使用多种解法,例如有限元法,以求得最优解。

圆弧拟合算法引言圆弧拟合算法是计算机图形学中的一项重要技术,用于将一系列离散的点数据近似拟合成一个圆弧。
圆弧拟合算法在许多领域中都有广泛应用,例如轨迹规划、CAD 设计、机器人路径规划等。
本文将深入探讨圆弧拟合算法的原理和应用。
算法描述圆弧拟合算法的目标是找到最适合的圆弧来拟合给定的点集。
为了实现这一目标,通常采用最小二乘法来求解。
以下是圆弧拟合算法的步骤:步骤一:数据预处理首先,需要对给定的点集进行预处理,以去除异常值和噪声。
常用的方法是通过距离阈值或角度阈值来筛选数据点。
步骤二:参数初始化在进行圆弧拟合之前,需要初始化一些参数,如圆心坐标和半径。
可以选择一些初始值,然后通过迭代优化的方式不断调整参数。
步骤三:优化拟合根据最小二乘法的原理,可以通过最小化拟合误差来得到最佳的圆弧。
常用的优化方法有迭代法和拟合函数法。
步骤四:误差评估在拟合完成后,需要对拟合结果进行误差评估。
可以计算每个数据点到拟合圆弧的距离,并计算平均误差或最大误差。
应用场景圆弧拟合算法在许多领域中都有广泛应用。
以下是一些典型的应用场景:轨迹规划在机器人运动控制中,圆弧拟合算法可以用于规划机器人的路径。
通过拟合输入点集,可以得到最优的圆弧轨迹,从而实现平滑运动和避免路径突变。
CAD设计在计算机辅助设计(CAD)中,圆弧是常用的几何图形之一。
通过圆弧拟合算法,可以将离散的数据点转换为光滑的圆弧,从而提高设计的精度和美观度。
机器人路径规划在机器人路径规划中,圆弧拟合算法可以用于规划机器人的运动轨迹。
通过拟合输入的路径点,可以得到最优的圆弧路径,并减少机器人的停止时间和能量消耗。
数据处理在数据分析和数据挖掘中,圆弧拟合算法可以用于处理曲线数据。
通过拟合曲线,可以得到曲线的特征,从而进行进一步的分析和挖掘。
算法评价与展望圆弧拟合算法是一个复杂的算法,在实际应用中需要考虑到许多因素,如数据量、噪声情况和计算复杂度等。
因此,算法的性能评价是非常重要的。
椭球方程拟合 c++(原创版)目录1.椭球方程简介2.椭球方程拟合的应用3.C++编程实现椭球方程拟合4.总结与展望正文1.椭球方程简介椭球方程是一种在计算机图形学和数值分析中广泛应用的方程,主要用于描述椭球体的参数方程。
它可以表示为:Ax + By + Cz = 1其中 A、B、C 为方程的参数,决定了椭球体的形状。
通过调整这些参数,可以得到不同形状的椭球体。
在实际应用中,椭球方程拟合是一种重要的技术,可以用来逼近不规则的三维数据。
2.椭球方程拟合的应用椭球方程拟合在许多领域都有广泛的应用,例如:(1)计算机图形学:椭球方程可以用来表示三维场景中的椭球体,为图形渲染提供准确的参数;(2)数值分析:在数值分析中,椭球方程拟合可以用来逼近不规则的数据集,提高计算精度;(3)机器学习:在机器学习领域,椭球方程拟合可以用来对数据进行特征提取,提高分类和识别的准确性。
3.C++编程实现椭球方程拟合为了实现椭球方程拟合,我们可以使用 C++编程语言。
以下是一个简单的示例:```cpp#include <iostream>#include <cmath>#include <vector>using namespace std;int main() {// 输入数据点的坐标vector<vector<double>> points = {{1, 2, 3}, {4, 5, 6}, {7, 8, 9},{10, 11, 12}, {13, 14, 15}, {16, 17, 18}};// 计算椭球方程的参数double a = 0.0, b = 0.0, c = 0.0;for (const auto &point : points) {double x = point[0], y = point[1], z = point[2];double dx = x * x, dy = y * y, dz = z * z;double A = dx + dy + dz - 3;double B = 3 * (dx * dy + dy * dz + dz * dx) - 3 * (dx + dy + dz);double C = 3 * (dx * dy * dz - dx * dz - dy * dx);a += A;b += B;c += C;}a /= points.size();b /= points.size();c /= points.size();// 输出椭球方程cout << "椭球方程为:" << a << "x + " << b << "y + " << c << "z = 1" << endl;return 0;}```4.总结与展望本文介绍了椭球方程的简介、应用以及如何使用 C++编程实现椭球方程拟合。
指定椭圆圆心的椭圆拟合1.引言1.1 概述椭圆拟合是一种通过拟合一组散点数据来估计最佳椭圆参数的方法。
它在各个领域中都有广泛的应用,比如计算机视觉、图像处理、测量学和机器学习等。
椭圆作为数学上重要的几何形状之一,具有独特的特性和广泛的应用背景。
与其他几何形状相比,椭圆能够很好地描述一些自然界和人工系统中的真实数据。
本文将重点讨论指定椭圆圆心的椭圆拟合方法。
在传统的椭圆拟合方法中,通常将椭圆的圆心看作是未知的参数,需要通过迭代计算来获得。
然而,在某些应用场景中,我们已经有了对椭圆圆心的先验知识,因此可以将圆心作为已知参数进行椭圆拟合。
这种指定椭圆圆心的椭圆拟合能够更准确地估计椭圆的形状和位置。
在接下来的章节中,我们将首先介绍椭圆的定义和特性,包括其数学表达方式、离心率、焦点等。
然后,我们将详细讨论椭圆拟合的概念和应用,阐述其在不同领域中的意义和作用。
最后,我们将重点讨论指定椭圆圆心的椭圆拟合方法,并分析其优势和适用性。
本文的目标是通过深入探讨指定椭圆圆心的椭圆拟合方法,为读者提供系统的理论基础和实践指导。
通过该方法,我们可以更好地利用已知的先验信息来提高椭圆拟合的准确性和稳定性,为相关领域的研究和应用提供有力的支持。
接下来的章节将按照以下结构进行组织。
首先,我们将介绍椭圆的基本定义和特性,并解释椭圆参数的物理意义。
然后,我们将详细介绍椭圆拟合的概念和应用,包括椭圆拟合的常见算法和评价指标。
最后,我们将重点讨论指定椭圆圆心的椭圆拟合方法,包括优化算法和参数估计技术。
通过深入研究这些内容,读者将能够全面了解指定椭圆圆心的椭圆拟合方法,并能够在实际应用中灵活运用。
总之,本文将以指定椭圆圆心的椭圆拟合为主题,旨在为读者提供全面的理论和实践指导。
希望通过本文的阐述,能够增加读者对椭圆拟合方法的认识和理解,为相关领域的研究和应用提供有益的参考。
在接下来的章节中,我们将详细讨论椭圆的定义和特性,以及椭圆拟合的概念和方法。
matlab学习:最⼩⼆乘拟合基于RANSAC的直线拟合椭圆拟合1.最⼩⼆乘拟合最⼩⼆乘拟合是⼀种数学上的近似和优化,利⽤已知的数据得出⼀条直线或者曲线,使之在坐标系上与已知数据之间的距离的平⽅和最⼩。
2.RANSAC算法参见王荣先⽼师的博⽂3,直线拟合建⽴模型时利⽤直线的⼀般⽅程AX+BY+C=0,随机选取两点构建直线模型,计算每个点到此直线的TLS(Total Least Square),TLS⼩于⼀定阈值时的点为符合模型的点,点数最多时的模型即为最佳直线模型。
再根据此时的直线参数画出最终拟合直线。
4.椭圆拟合建⽴模型时利⽤椭圆的定义⽅程:dist(P,A)+dist(P,B)=DIST,其中P为椭圆上⼀点,A和B为椭圆两焦点。
随机选取三点A,B,P构建椭圆模型,计算每个点到此两焦点的距离和与DIST的差值,差值⼩于⼀定阈值时的点为符合模型的点,点数最多时的模型即为最佳椭圆模型,再根据符合条件的点,利⽤椭圆⼀般⽅程Ax2+Bxy+Cy2+Dx+Ey+F=0 和得到符合点进⾏系数拟合,根据函数式画出最终拟合椭圆。
5.matlab代码(1)最⼩⼆乘拟合View Code%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% FILENAME LSF.m% FUNCTION Input points with mouse,Least-squares fit of lines to% 2D points% DATE 2012-10-12% AUTHOR zhangying %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%clc;%% ⿏标输⼊点,enter键结束axis([-1010 -1010]);[x,y]=ginput; %读取坐标直到按下回车键,返回坐标点的x,y坐标num=length(x); %计算点的个数%% 直接⽤最⼩⼆乘进⾏拟合%通过最⼩化误差的平⽅和寻找数据的最佳函数匹配[p1,s1]=polyfit(x,y,1); %n=1为直线拟合 x,y为数据点,n为多项式阶数,返回p为幂次从⾼到低的多项式系数向量[p2,s2]=polyfit(x,y,num-2); %n>1为曲线拟合,找到次数为n的多项式,对于数据点集(x,y),满⾜差的平⽅和最⼩[p3,s3]=polyfit(x,y,num-1); %x必须是单调的。

圆弧拟合算法范文
常见的圆弧拟合算法有以下几种:
1.最小二乘法拟合算法:该算法基于最小二乘法原理,在拟合过程中
将离散点到圆弧的距离的平方和最小化。
通过对误差函数求导,可以得到
最小二乘法拟合的圆弧方程的参数。
2.最小二乘法拟合加速算法:最小二乘法拟合算法的计算复杂度较高,特别是在点集较大时。
为了加快计算速度,可以采用一些优化技巧,如分
治法和快速最小二乘法。
3.多项式拟合算法:多项式拟合算法将圆弧表示为一个多项式方程,
通过求解该方程的系数来拟合最佳圆弧。
多项式拟合算法可以根据实际需
求选择不同的阶数,从而灵活地适应不同的数据特征。
此外,圆弧拟合算法还可以结合其他优化算法,如遗传算法、模拟退
火算法等,以进一步提高拟合效果。
圆弧拟合算法的应用十分广泛。
在计算机图形学中,圆弧拟合算法可
以用于生成平滑的曲线,例如绘制曲线、字体的生成等。
在CAD/CAM领域,圆弧拟合算法可以用于零件的设计和加工路径的规划。
在机器人运动规划中,圆弧拟合算法可以用于生成机器人的轨迹,以实现精确的运动控制。
总之,圆弧拟合算法是一种重要的数学计算方法,它能够在离散的点
集中寻找到最佳的圆弧拟合。
通过将离散数据转化为连续的曲线,圆弧拟
合算法在各种应用领域中发挥着重要作用。
CAD曲线拟合技巧详解在使用CAD软件进行设计和绘图时,曲线是不可或缺的一种元素。
对于复杂的曲线,如何进行准确的拟合成为了一个重要的问题。
本文将详细介绍CAD曲线拟合的技巧,帮助读者掌握如何在CAD软件中进行曲线拟合。
一、基础概念在开始学习CAD曲线拟合之前,先要明确一些基础概念。
1. 开放曲线和闭合曲线:开放曲线是指没有起点和终点的曲线,闭合曲线是指起点和终点相接的曲线。
2. 控制点和节点:控制点是指用来调整和控制曲线形状的点,节点是指控制点之间的连接线段。
3. 曲线类型:CAD软件中常用的曲线类型有直线、圆弧、椭圆、样条曲线等。
二、CAD曲线拟合技巧1. 直线拟合:对于一系列相邻的线段,可以使用CAD软件的直线拟合命令将它们拟合成一条直线。
选择线段,点击直线拟合命令,在命令选项中选择合适的拟合参数,即可完成直线拟合操作。
2. 圆弧拟合:对于一组相邻的弧段,可以使用CAD软件的圆弧拟合命令将它们拟合成一个圆弧。
选择弧段,点击圆弧拟合命令,在命令选项中选择合适的拟合参数,即可完成圆弧拟合操作。
3. 椭圆拟合:对于一组相邻的椭圆弧段,可以使用CAD软件的椭圆拟合命令将它们拟合成一个椭圆。
选择椭圆弧段,点击椭圆拟合命令,在命令选项中选择合适的拟合参数,即可完成椭圆拟合操作。
4. 样条曲线拟合:对于复杂的曲线,可以使用CAD软件的样条曲线拟合命令进行拟合。
选择要拟合的曲线,点击样条曲线拟合命令,在命令选项中选择合适的拟合参数,即可完成样条曲线拟合操作。
三、曲线拟合的注意事项在进行曲线拟合时,需要注意以下几点:1. 选择拟合参数:CAD软件中针对不同的曲线类型,都有相应的拟合参数可以调整。
根据实际情况选择合适的拟合参数,可以得到更加准确的拟合结果。
2. 控制点调整:在进行曲线拟合之后,可能需要对拟合曲线的形状进行微调。
可以通过调整控制点的位置,来实现对曲线形状的调整。
3. 保持曲线平滑:在进行曲线拟合时,要尽量保持曲线的平滑性。
levenberg-marquardt算法拟合椭球误差方程matlab 1. 引言1.1 概述在计算机科学和数学领域,拟合问题是一种常见的数值优化任务,其目标是通过寻找一个函数或者数学模型来最好地逼近给定的数据集。
椭球误差方程作为一种重要的拟合问题,在多个领域中都有广泛的应用,比如地理测量、图像处理等。
椭球误差方程拟合问题旨在使用已知的数据点来确定一个椭球表面,从而使得与实际观测值之间的误差最小化。
1.2 文章结构本文将系统地讨论Levenberg-Marquardt算法在拟合椭球误差方程中的应用。
首先,我们将介绍Levenberg-Marquardt算法的原理和特点,并探讨其在优化问题中的优势和局限性。
然后,我们将详细说明椭球误差方程模型以及相关参数的获取和预处理方法。
接下来,我们将介绍如何使用Levenberg-Marquardt 算法进行椭球误差方程的拟合,并分析其效果与收敛性能。
最后,我们将设计实验并对结果进行分析和讨论,并提出一些改进方法与展望。
1.3 目的本文旨在探究和研究Levenberg-Marquardt算法在椭球误差方程拟合问题中的适用性和效果。
通过实验证明该算法在解决这一特定问题上的优势,并且为相关领域的研究提供一定的参考和借鉴。
同时,本文也希望找出使用Levenberg-Marquardt算法拟合椭球误差方程存在的问题与局限性,并对后续工作提出展望,以进一步改进和完善该方法在实际应用中的效果。
2. Levenberg-Marquardt算法:2.1 算法原理:Levenberg-Marquardt算法是一种非线性最小二乘拟合算法,常用于解决参数问题的拟合。
该算法的目标是通过调整参数值,使得误差函数的平方和最小化。
它结合了高斯-牛顿方法和梯度下降法的优点,通过引入一个阻尼因子来平衡两者之间的权衡。
算法的核心思想是在每次迭代过程中,根据当前参数值计算误差函数的梯度矩阵和雅可比矩阵,并通过求解一个增量方程获得新的参数估计值。
数控加工技术现代制造工程(Modern Manufacturing Engineering)2011年第9期椭圆加工中的圆弧拟合及加减速算法研究陈光黎,张严林,钟震宇,肖先文(广东省科学院自动化工程研制中心,广州510070)摘要:很多数控机床不支持椭圆插补,因此椭圆加工一般采用圆弧拟合的方法转换成圆弧加工。
采用椭圆的最优四圆弧逼近拟合算法,用数字积分法(DDA)进行圆弧插补。
用小段割线拟合圆弧起点和终点的小段圆弧,将圆弧的加减速控制转换成直线的加减速控制,解决了DDA圆弧插补的加减速控制难题。
关键词:椭圆;圆弧;数字积分法(DDA);加减速中图分类号:TP273文献标志码:B文章编号:1671—3133(2011)09—0037—03Research on algorithm of arc approach&acceleration/decelerationcontrol for ellipse processCHEN Guang-li,ZHANG Yan-lin,ZHONG Zhen-yu,XIAO Xian-wen(Automation Engineering R&M Center,Guangdong Academy of Sciences,Guangzhou510070,China)Abstract:Most CNC machines are not equipped with ellipse interpolation,so the arc approach&arc process are often used as a substitute for ellipse process.The optimized4-arc approach algorithm is presented and the approximate error is analysed.The DDA arc interpolation has a difficulte problem of acceleration/deceleration algorithm.A short secant is as a substitute for a short art at arc’s endpoint,and acceleration/deceleration algorithm for DDA arc interpolation is substituted by one for line interpola-tion,which solve the problem of acceleration/deceleration for DDA arc interpolation by means of a common MCU.Key words:ellipse;arc;DDA;acceleration/deceleration1椭圆加工概述目前,椭圆加工一般有两种方案:椭圆插补及圆弧拟合加工。
应用差分进化算法评定椭圆轮廓度误差易建【摘要】根据评定误差的最小包容区域准则(Minimum zone criteria,MZC),应用坐标变换法建立评定椭圆轮廓度误差的5变量鞍点规划模型.因MZC误差评定模型的关键是计算每个测点到理想椭圆轮廓的最小距离,为此采用一维搜索算法求解该最小距离.由于差分进化(Differential evolution,DE)算法具有概念简单和收敛速度快的优点,文中利用该算法求解评定椭圆轮廓度误差优化问题.给出2个椭圆轮廓度误差评定实例.结果表明,提出的模型和算法可行有效,其评定结果小于应用最小外接椭圆和最大内接椭圆法求得的误差.在相同计算开销的条件下,DE算法的性能指标优于遗传算法和粒子群算法.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)009【总页数】4页(P61-63,68)【关键词】椭圆轮廓度误差;误差评定;鞍点规划;一维搜索;差分进化算法【作者】易建【作者单位】重庆工商大学制造装备机构设计与控制重庆市重点实验室,重庆400067;泸州职业技术学院机械工程系,四川泸州646005【正文语种】中文【中图分类】TH16;TH161.13;TB921工程中广泛使用二次曲线作为零部件轮廓曲线,因此,二次曲线轮廓度误差评定是曲线轮廓度测量的重要内容之一。
椭圆是一种常用二次曲线,在一些特殊场合被用作零部件轮廓曲线。
故椭圆轮廓度误差评定研究在精密制造中具有重要理论价值和实践意义。
椭圆轮廓度公差带是与理想椭圆内外等距的两曲线形成的包容区域,但目前国家标准和国际标准均未给出该轮廓度误差评定算法。
椭圆轮廓度误差的常用评定方法有最小二乘法[1]和内包容(最大内接椭圆)、外包容(最小外接椭圆)法[2]等。
采用最小区域准则(Minimum zone criteria,MZC)与智能算法相结合的方法评定椭圆轮廓度误差。
MZC的实质是寻找理想椭圆,使其内外等距线包容各测量点,且两等距线之间的法向距离取最小值。
椭圆弧等误差直线拟合的算法研究
为实现椭圆弧的等误差直线拟合,提出了一种基于罗尔定理和二分法的曲线节点计算新算法。
该算法通过二分角度迭代求解弦与对应的弧之间的误差,逐步逼近程序要求的允差。
最后,总结了具体的算法流程并进行了轨迹仿真验证。
标签:等误差拟合;二分法;罗尔定理
引言
本文提出了一种基于罗尔定理与二分法的曲线等误差直线拟合新算法,适用于椭圆弧的拟合节点计算,该算法通过二分角度迭代求解弦与对应的弧之间的误差,逐步逼近程序要求的允差,避免了高次方程组的求解[1][2],可广泛应用于数控加工。
1 基于罗尔定理与二分法的曲线等误差直线拟合新算法
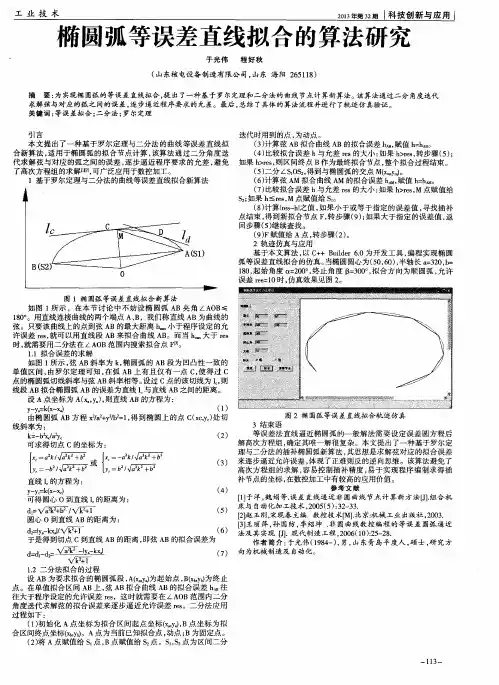
图1 椭圆弧等误差直线拟合新算法
如图1所示,在本节讨论中不妨设椭圆弧AB夹角∠AOB≤180°。
用直线连接曲线的两个端点A、B,我们称直线AB为曲线的弦。
只要该曲线上的点到弦AB的最大距离hmax小于程序设定的允许误差res,就可以用直线段AB来拟合曲线AB。
而当hmax大于res时,就需要用二分法在∠AOB范围内搜索拟合点F[3]。
1.1 擬合误差的求解
如图1所示,弦AB斜率为k,椭圆弧的AB段为凹凸性一致的单值区间,由罗尔定理可知,在弧AB上有且仅有一点C,使得过C点的椭圆弧切线斜率与弦AB斜率相等。
设过C点的该切线为lc,则线段AB拟合椭圆弧AB的误差为直线lc与直线AB之间的距离。
设A点坐标为A(xa,ya),则直线AB的方程为:
y-ya=k(x-xa)(1)
由椭圆弧AB方程x2/a2+y2/b2=1,得到椭圆上的点C(xc,yc)处切线斜率为:
k=-b2xc/a2yc (2)
可求得切点C的坐标为:
或(3)
直线lc的方程为:
y-yc=k(x-xc)(4)
可得圆心O到直线lc的距离为:
d1= / (5)
圆心O到直线AB的距离为:
d2=|ya-kxa|/ (6)
于是得到切点C到直线AB的距离,即弦AB的拟合误差为
d=d1-d2= (7)
1.2 二分法拟合的过程
设AB为要求拟合的椭圆弧段,A(xa,ya)为起始点,B(xb,yb)为终止点。
在单值拟合区间AB上,弦AB拟合曲线AB的拟合误差hAB往往大于程序设定的允许误差res,这时就需要在∠AOB范围内二分角度迭代求解弦的拟合误差来逐步逼近允许误差res。
二分法应用过程如下:
(1)初始化A点坐标为拟合区间起点坐标(xa,ya),B点坐标为拟合区间终点坐标(xb,yb)。
A点为当前已知拟合点,动点;B为固定点。
(2)将A点赋值给S1点,B点赋值给S2点。
S1,S2点为区间二分迭代时用到的点,为动点。
(3)计算弦AB拟合曲线AB的拟合误差hAB,赋值h=hAB。
(4)比较拟合误差h与允差res的大小:如果h>res,转步骤(5);如果h>res,则区间终点B作为最终拟合节点,整个拟合过程结束。
(5)二分∠S1OS2,得到与椭圆弧的交点M(xm,ym)。
(6)计算弦AM拟合曲线AM的拟合误差hAM,赋值h=hAM。
(7)比较拟合误差h与允差res的大小:如果h>res,M点赋值给S2;如果h?燮res,M点赋值给S1。
(8)计算|res-h|之值,如果小于或等于指定的误差值,寻找插补点结束,得
到新拟合节点F,转步骤(9);如果大于指定的误差值,返回步骤(5)继续查找。
(9)F赋值给A点,转步骤(2)。
2 轨迹仿真与应用
基于本文算法,以C++ Builder 6.0为开发工具,编程实现椭圆弧等误差直线拟合的仿真。
当椭圆圆心为(50,60),半轴长a=320,b=180,起始角度?琢=200°,终止角度?茁=300°,拟合方向为顺圆弧,允许误差res=10时,仿真效果见图2。
图2 椭圆弧等误差直线拟合轨迹仿真
3 结束语
等误差法直线逼近椭圆弧的一般解法需要设定误差圆方程后解高次方程组,确定其唯一解很复杂。
本文提出了一种基于罗尔定理与二分法的插补椭圆弧新算法,其思想是求解弦对应的拟合误差来逐步逼近允许误差,体现了正难则反的逆向思维。
该算法避免了高次方程组的求解,容易控制插补精度,易于实现程序编制求得插补节点的坐标,在数控加工中有较高的应用价值。
参考文献
[1]于洋,魏娟等.误差直线逼近非圆曲线节点计算新方法[J].组合机床与自动化加工技术,2005(5):32-33.
[2]赵玉刚,宋现春主编. 数控技术[M].北京:机械工业出版社,2003.
[3]王丽萍,孙国防,季绍坤.非圆曲线数控编程的等误差圆弧逼近法及其实现[J]. 现代制造工程,2006(10):25-28.
作者简介:于光伟(1984-),男,山东青岛平度人,硕士,研究方向为机械制造及自动化。